Você também pode gostar
- Proakis Ejercicios Cap 2Documento12 páginasProakis Ejercicios Cap 2Anonymous yeTg3p1faHAinda não há avaliações
- Representación de Señales Periodicas en Serie de FourierDocumento13 páginasRepresentación de Señales Periodicas en Serie de FourierJoxe David Vergara DiaxAinda não há avaliações
- Transformada Inversa ZDocumento52 páginasTransformada Inversa ZAlfredo Gil VelascoAinda não há avaliações
- Análisis de Fourier Usando MatlabDocumento35 páginasAnálisis de Fourier Usando MatlabAndres GaleanoAinda não há avaliações
- Tarea 2 ConvoluciónDocumento15 páginasTarea 2 ConvoluciónEdwin LarrahondoAinda não há avaliações
- Grupo 208052 1 Fase3 TeoricoDocumento36 páginasGrupo 208052 1 Fase3 TeoricoDanielRengifoAinda não há avaliações
- Unidad 4Documento12 páginasUnidad 4Don CarloAinda não há avaliações
- Análisis de Fourier Usando MatlabDocumento35 páginasAnálisis de Fourier Usando MatlabbrijaldofelixAinda não há avaliações
- LABORATORIO 04 y 05 Transformada Z y Fourier AluDocumento12 páginasLABORATORIO 04 y 05 Transformada Z y Fourier AluKarolaym Julieth Ruiz TorresAinda não há avaliações
- Transformada ZDocumento45 páginasTransformada ZLuz666Ainda não há avaliações
- Teorema de NisquisDocumento73 páginasTeorema de NisquisPaulo CamposAinda não há avaliações
- DocxDocumento4 páginasDocxEsteban ZapataAinda não há avaliações
- Sistemas de Modulacion I 24-03-2015Documento37 páginasSistemas de Modulacion I 24-03-2015Andy VillasantiAinda não há avaliações
- Paso 1Documento2 páginasPaso 1yenifer nietoAinda não há avaliações
- Tarea 2 - Senales en FrecuenciaDocumento28 páginasTarea 2 - Senales en FrecuenciaDIEGO MONTOYA RINCONAinda não há avaliações
- Transformada ZDocumento8 páginasTransformada ZJorgito PacaraAinda não há avaliações
- Presentacion de Señales y Sistemas 2Documento28 páginasPresentacion de Señales y Sistemas 2Ronny Díaz LópezAinda não há avaliações
- T.3 Transformada Dscreta de FourierDocumento62 páginasT.3 Transformada Dscreta de FourierMcmanic88Ainda não há avaliações
- Resumen Final Mat SupDocumento39 páginasResumen Final Mat SupRoman SadowskiAinda não há avaliações
- Poliarmonicas en Circuitos MonofasicosDocumento11 páginasPoliarmonicas en Circuitos MonofasicosSERGIO7-SAinda não há avaliações
- Analisis de Señales - Transformada de FourierDocumento11 páginasAnalisis de Señales - Transformada de FourierAdriana SequeraAinda não há avaliações
- FourierDocumento12 páginasFourierMariela LuxAinda não há avaliações
- Reporte # 2 Señales y Sistemas Discretos en El TiempoDocumento16 páginasReporte # 2 Señales y Sistemas Discretos en El Tiempodelgadito99 delgatoAinda não há avaliações
- Transformada Discreta de Fourier PDFDocumento15 páginasTransformada Discreta de Fourier PDFJohanArgüelloAinda não há avaliações
- Operaciones Básicas de Señales y Sistemas Continuos y DiscretosDocumento9 páginasOperaciones Básicas de Señales y Sistemas Continuos y DiscretosNixon RojasAinda não há avaliações
- Respuestas Trabajo FinalDocumento7 páginasRespuestas Trabajo FinalRodrigo Lincer CeballosAinda não há avaliações
- Transformada Z y Su Aplicación A Los Sistemas de ControlDocumento6 páginasTransformada Z y Su Aplicación A Los Sistemas de ControlPaulino Candido100% (1)
- Presencial Serie FourierDocumento4 páginasPresencial Serie FouriersebastianAinda não há avaliações
- Capítulo 06 - Discretización de SeñalesDocumento24 páginasCapítulo 06 - Discretización de SeñalesJulles Paul GrandAinda não há avaliações
- Actividad 1Documento12 páginasActividad 1DIANA MORELIA SILVAS FIGUEROAAinda não há avaliações
- PPT2 Redes Telecomunicaciones 7moDocumento116 páginasPPT2 Redes Telecomunicaciones 7moEDISON JONATHAN GUANUCHE LARGOAinda não há avaliações
- Transformada ZDocumento5 páginasTransformada ZoaAinda não há avaliações
- Transformada ZDocumento9 páginasTransformada ZAsael CarrascoAinda não há avaliações
- Intro SeñalesDocumento48 páginasIntro SeñalesSalvatore99Ainda não há avaliações
- Capitulo 1. Señales y SistemasDocumento36 páginasCapitulo 1. Señales y SistemasJuan DuarteAinda não há avaliações
- Apunte Unidad IDocumento16 páginasApunte Unidad IJavier Veloz MuñozAinda não há avaliações
- Unidad 3 - Parte 1 - Representacion Espectral - 2do T 2020Documento81 páginasUnidad 3 - Parte 1 - Representacion Espectral - 2do T 2020David Fer DuraznoAinda não há avaliações
- Senales 1Documento14 páginasSenales 1Luis David Molina CarvalhoAinda não há avaliações
- Tds Tema 1 Teoria PDFDocumento25 páginasTds Tema 1 Teoria PDFJohanes StefanopaulosAinda não há avaliações
- Transformada de FourierDocumento20 páginasTransformada de FourierJosé RojasAinda não há avaliações
- Señales y Sistemas TraduccionDocumento30 páginasSeñales y Sistemas Traduccionjaneth grAinda não há avaliações
- Guía de Laboratorio 4 FourierDocumento30 páginasGuía de Laboratorio 4 FourierNico NicoleAinda não há avaliações
- Guía de Laboratorio 4 FourierDocumento30 páginasGuía de Laboratorio 4 FourierLuis GalvezAinda não há avaliações
- Circuitos Electricos y Electronicos. Evaluacion 1 TeoriaDocumento11 páginasCircuitos Electricos y Electronicos. Evaluacion 1 TeoriaJosé Javier Romero MorenoAinda não há avaliações
- Explique Que Es Convolucion Continua y DiscretaDocumento7 páginasExplique Que Es Convolucion Continua y DiscretaJefferAinda não há avaliações
- Clase 10Documento5 páginasClase 10Aaron ZarateAinda não há avaliações
- Momento Final Grupo 203042-2Documento4 páginasMomento Final Grupo 203042-2jofer666Ainda não há avaliações
- Transformada ZDocumento28 páginasTransformada ZVictorManuelPerezAlvaradoAinda não há avaliações
- Labo de Tele I - Series y Transformadas de FourierDocumento7 páginasLabo de Tele I - Series y Transformadas de FourierMelanie Elena RodasAinda não há avaliações
- Señales y Sistemas - Alan V. Oppenheim y Alan S. Willsky. 2ed. - MatematicaReviewDocumento17 páginasSeñales y Sistemas - Alan V. Oppenheim y Alan S. Willsky. 2ed. - MatematicaReviewAleeja LopezAinda não há avaliações
- Transformada ZDocumento18 páginasTransformada ZPriscila AntonAinda não há avaliações
- Curso básico de teoría de númerosNo EverandCurso básico de teoría de númerosNota: 5 de 5 estrelas5/5 (2)
- Planificación y Control de La ProducciónDocumento10 páginasPlanificación y Control de La ProducciónjjphAinda não há avaliações
- Estadistica No ParametricaDocumento17 páginasEstadistica No ParametricajjphAinda não há avaliações
- Optimización Con RestriccionesDocumento4 páginasOptimización Con Restriccionesjjph0% (1)
- Ejercicios RadicacionDocumento4 páginasEjercicios Radicaciongloriacontreras98Ainda não há avaliações
- Programa Orden y LimpiezaDocumento49 páginasPrograma Orden y LimpiezaRaulAinda não há avaliações
- Trabajo Word MRP IDocumento62 páginasTrabajo Word MRP IJose Luis Santillan RojasAinda não há avaliações
- Unidad 3: Tarea 3 - Realizar Las Modulaciones Digitales.Documento22 páginasUnidad 3: Tarea 3 - Realizar Las Modulaciones Digitales.Esteban ZapataAinda não há avaliações
- LineaCuestecitas LaLoma500kv GalvisAngie GarciaJesus GomezNathalia MurallasSebastian H1Documento30 páginasLineaCuestecitas LaLoma500kv GalvisAngie GarciaJesus GomezNathalia MurallasSebastian H1Natalia MantillaAinda não há avaliações
- Tornillos de PotenciaDocumento4 páginasTornillos de PotenciaDaniel SierraAinda não há avaliações
- Emei U1 A3 AlshDocumento10 páginasEmei U1 A3 AlshIri SolísAinda não há avaliações
- Práctica 2 - Humidificación - L3Documento7 páginasPráctica 2 - Humidificación - L3PINEDA CASTAÑEDA VANESSA DEL CARMENAinda não há avaliações
- Product Safety-Data-Sheets Ah-Sds Serum Gonadotrophin Formulation AH ES ESDocumento16 páginasProduct Safety-Data-Sheets Ah-Sds Serum Gonadotrophin Formulation AH ES ESfrancis urieles galvisAinda não há avaliações
- Semana 03 - Herramientas de Registro JEFE DE PRACTICADocumento23 páginasSemana 03 - Herramientas de Registro JEFE DE PRACTICAAlexis DiazAinda não há avaliações
- Resolución Problemas Pérdidas.Documento15 páginasResolución Problemas Pérdidas.Joe ToazaAinda não há avaliações
- El TacometroDocumento3 páginasEl TacometroNerio Hugo Morera MaqueraAinda não há avaliações
- DISEÑO DE PUENTE TIPO VIGA LOSA (Luz 15m)Documento32 páginasDISEÑO DE PUENTE TIPO VIGA LOSA (Luz 15m)Daina MarmanilloAinda não há avaliações
- Memoria DescriptivaDocumento38 páginasMemoria DescriptivaPedro Velasquez SamaméAinda não há avaliações
- Red de Abastecimiento de Agua Potable de RiobambaDocumento8 páginasRed de Abastecimiento de Agua Potable de RiobambaDiego MonteroAinda não há avaliações
- Xdoc - MX Universidad Nacional Abierta Ya Distancia PDFDocumento222 páginasXdoc - MX Universidad Nacional Abierta Ya Distancia PDFWill NinaAinda não há avaliações
- NRF 319 Pemex 2014Documento21 páginasNRF 319 Pemex 2014Nicole Williams100% (1)
- Branch ConnectionsDocumento4 páginasBranch Connectionspablopasqualini18100% (1)
- Acreditable Maricely Lopez Act 4 4312Documento4 páginasAcreditable Maricely Lopez Act 4 4312Maricely LopezAinda não há avaliações
- Proyecto Texcumar 4Documento30 páginasProyecto Texcumar 4Diana TandazoAinda não há avaliações
- OscilacionesDocumento2 páginasOscilacionesErnesto Fabián Gandolfo Raso0% (1)
- Inversor Con Fuente de Voltaje (VSI) para Fuente Sinusoidal de Voltaje y Frecuencia VariablesDocumento9 páginasInversor Con Fuente de Voltaje (VSI) para Fuente Sinusoidal de Voltaje y Frecuencia VariablesArielParraAinda não há avaliações
- Atividades de Aplicación Tema 1Documento5 páginasAtividades de Aplicación Tema 1JOEL MAGDALENO GONZALEZAinda não há avaliações
- Ficha Técnica de ElectrificaciónDocumento9 páginasFicha Técnica de ElectrificaciónElmer Jhon Lino CrespoAinda não há avaliações
- Presentación Pugasa PDFDocumento6 páginasPresentación Pugasa PDFalkovalenoAinda não há avaliações
- Alcantarillado Novafort PavcoDocumento36 páginasAlcantarillado Novafort PavcoJose Luis H. HuamangaAinda não há avaliações
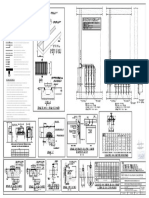
- Leyenda:: Ing° Emilio Villegas CalderonDocumento1 páginaLeyenda:: Ing° Emilio Villegas CalderonRosa Marleni Valentin PalominoAinda não há avaliações
- Trabajo de Sistema de Primer Orden (Medidor de Temperatura)Documento9 páginasTrabajo de Sistema de Primer Orden (Medidor de Temperatura)Nelson Rafael Vicent RuedaAinda não há avaliações
- CalderosDocumento9 páginasCalderosValery GarciaAinda não há avaliações
- Características Del Estado Plasma de La MateriaDocumento3 páginasCaracterísticas Del Estado Plasma de La MateriaDaniel EbrathAinda não há avaliações
- Administracion Del Mantenimiento ManualDocumento10 páginasAdministracion Del Mantenimiento Manualjesus emmanuel castillo riosAinda não há avaliações