Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Math MCQDocumento19 páginasMath MCQCamille LeiAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- CAPE Pure Math Unit 1 2008-14Documento78 páginasCAPE Pure Math Unit 1 2008-14kesna100% (6)
- Mathematics IN AGRICULTURE PDFDocumento144 páginasMathematics IN AGRICULTURE PDFAndres Brutas100% (6)
- CIVE 601 Project Management: Repetitive (Linear) SchedulingDocumento57 páginasCIVE 601 Project Management: Repetitive (Linear) SchedulingMahnooranjum100% (1)
- Digital Literacy Level 6-Assessors GuideDocumento12 páginasDigital Literacy Level 6-Assessors GuideNjoka Samuel KAinda não há avaliações
- Compensation Plan: Money For LifeDocumento30 páginasCompensation Plan: Money For LifeNjoka Samuel KAinda não há avaliações
- QAWorld TransTeam FAQDocumento16 páginasQAWorld TransTeam FAQNjoka Samuel KAinda não há avaliações
- ICS 3202-Information Systems: Systems Analysis and DesignDocumento28 páginasICS 3202-Information Systems: Systems Analysis and DesignNjoka Samuel KAinda não há avaliações
- Digital Literacy Level 6-Candidates ToolDocumento3 páginasDigital Literacy Level 6-Candidates ToolNjoka Samuel KAinda não há avaliações
- Compensation Plan: Money For LifeDocumento30 páginasCompensation Plan: Money For LifeNjoka Samuel KAinda não há avaliações
- Quantitative TechniquesDocumento3 páginasQuantitative TechniquesNjoka Samuel KAinda não há avaliações
- School Grade/Pp Learning Area Term Year Name of The Teacher PP1 ThreeDocumento7 páginasSchool Grade/Pp Learning Area Term Year Name of The Teacher PP1 ThreeNjoka Samuel KAinda não há avaliações
- 8505 Pp2 Mathematics Activities Term 3Documento36 páginas8505 Pp2 Mathematics Activities Term 3Njoka Samuel KAinda não há avaliações
- School Grade/Pp Learning Area Term Year Name of The Teacher PP1 ThreeDocumento17 páginasSchool Grade/Pp Learning Area Term Year Name of The Teacher PP1 ThreeNjoka Samuel KAinda não há avaliações
- Calc Notes 0103Documento16 páginasCalc Notes 0103Njoka Samuel KAinda não há avaliações
- QAWorld TransTeam FAQDocumento16 páginasQAWorld TransTeam FAQNjoka Samuel KAinda não há avaliações
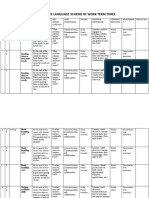
- Pp2 Term 3 Schemes of Work Language ActivitiesDocumento7 páginasPp2 Term 3 Schemes of Work Language ActivitiesNjoka Samuel KAinda não há avaliações
- Practical Lecture5 PDFDocumento10 páginasPractical Lecture5 PDFNjoka Samuel KAinda não há avaliações
- 8477 Pp2 Language Activities Term 3Documento5 páginas8477 Pp2 Language Activities Term 3Njoka Samuel KAinda não há avaliações
- SECTION 2.2: Properties of Limits and Algebraic Functions: Limit Form 0Documento11 páginasSECTION 2.2: Properties of Limits and Algebraic Functions: Limit Form 0Njoka Samuel KAinda não há avaliações
- Calc Notes 0304Documento18 páginasCalc Notes 0304Njoka Samuel KAinda não há avaliações
- Calc Notes 0303Documento14 páginasCalc Notes 0303Njoka Samuel KAinda não há avaliações
- Encoding and ModulationDocumento22 páginasEncoding and ModulationNjoka Samuel KAinda não há avaliações
- Section 2.4: Limits and Infinity Ii: Learning ObjectivesDocumento7 páginasSection 2.4: Limits and Infinity Ii: Learning ObjectivesNjoka Samuel KAinda não há avaliações
- Review: Topic 1: FunctionsDocumento20 páginasReview: Topic 1: FunctionsNjoka Samuel KAinda não há avaliações
- Section 2.6: The Squeeze (Sandwich) Theorem: Learning ObjectivesDocumento9 páginasSection 2.6: The Squeeze (Sandwich) Theorem: Learning ObjectivesNjoka Samuel KAinda não há avaliações
- Believers International: Eturning O HE ORDDocumento4 páginasBelievers International: Eturning O HE ORDNjoka Samuel KAinda não há avaliações
- Topic 2: Trigonometry I: Part A: Angle MeasuresDocumento10 páginasTopic 2: Trigonometry I: Part A: Angle MeasuresNjoka Samuel K100% (1)
- Calculus: Chapter 1, Chapter 2, Sections 3.1-3.6Documento55 páginasCalculus: Chapter 1, Chapter 2, Sections 3.1-3.6Njoka Samuel KAinda não há avaliações
- Calc Notes 010 RDocumento4 páginasCalc Notes 010 RNjoka Samuel KAinda não há avaliações
- Eagle View Issue 41Documento28 páginasEagle View Issue 41Njoka Samuel KAinda não há avaliações
- Calculus: Chapter 1, Chapter 2, Sections 3.1-3.6Documento9 páginasCalculus: Chapter 1, Chapter 2, Sections 3.1-3.6Njoka Samuel KAinda não há avaliações
- Section 2.5: The Indeterminate Forms 0 0 AND: Learning ObjectivesDocumento8 páginasSection 2.5: The Indeterminate Forms 0 0 AND: Learning ObjectivesNjoka Samuel KAinda não há avaliações
- WK 1 Introduction and Definition of DerivativesDocumento20 páginasWK 1 Introduction and Definition of DerivativesrenatoamarAinda não há avaliações
- PDF 6 Mechanics of DBDocumento18 páginasPDF 6 Mechanics of DBRizette PaloganAinda não há avaliações
- Manual of Pesticide Residue Analysis Volume IIDocumento493 páginasManual of Pesticide Residue Analysis Volume IISuyog patilAinda não há avaliações
- 5JMSEAT0101104JiriMalac67 87Documento21 páginas5JMSEAT0101104JiriMalac67 87Sonia IlesAinda não há avaliações
- Motion in One Dimension: Conceptual ProblemsDocumento116 páginasMotion in One Dimension: Conceptual Problems정구영Ainda não há avaliações
- Mathpower 11, Western EditionDocumento14 páginasMathpower 11, Western EditionJoJo IsthewayAinda não há avaliações
- MCV4U - Unit 3 - Version ADocumento60 páginasMCV4U - Unit 3 - Version AhayatAinda não há avaliações
- The Velocity-Time Graphs Represent The Motion of Two Cars, Car A and Car B. Justify AllDocumento5 páginasThe Velocity-Time Graphs Represent The Motion of Two Cars, Car A and Car B. Justify AllJunLi CaiAinda não há avaliações
- Penguin Slushy VanDocumento11 páginasPenguin Slushy Vananilorak89Ainda não há avaliações
- SLM Mathematical Economics Unit 1Documento9 páginasSLM Mathematical Economics Unit 1aradhana SAinda não há avaliações
- Pretest in Mathematics 8Documento8 páginasPretest in Mathematics 8Jessa Marie SanteroAinda não há avaliações
- MATHEMATICS - Analytic Geometry 1Documento2 páginasMATHEMATICS - Analytic Geometry 1ARNOLD MORAN100% (1)
- 12 Slope of TangentDocumento3 páginas12 Slope of TangentRia BarianaAinda não há avaliações
- Differential Calculus: Module 01: FunctionsDocumento5 páginasDifferential Calculus: Module 01: FunctionsMiahSalitaAinda não há avaliações
- Yousef Maklad Gizmo Term 3 1Documento6 páginasYousef Maklad Gizmo Term 3 1api-551575177Ainda não há avaliações
- Straight LinesDocumento6 páginasStraight LinesSteveMathewKuruvillaAinda não há avaliações
- Consumer Choice: 2.1 Utility Functions and Marginal Utility FunctionsDocumento7 páginasConsumer Choice: 2.1 Utility Functions and Marginal Utility FunctionsLaxman KeshavAinda não há avaliações
- Learning Activity Sheets in Physics 1 Week 2Documento9 páginasLearning Activity Sheets in Physics 1 Week 2John DcAinda não há avaliações
- CSU-Cabadbaran Advance Review For EE: Topic: Differential CalculusDocumento8 páginasCSU-Cabadbaran Advance Review For EE: Topic: Differential CalculusCinderella WhiteAinda não há avaliações
- P1gradient, Mid, DistDocumento25 páginasP1gradient, Mid, DistIr HeriawanAinda não há avaliações
- Differential EquationDocumento16 páginasDifferential Equationशिवम् सुनील कुमारAinda não há avaliações
- RPA Simm Et Al 2000Documento4 páginasRPA Simm Et Al 2000sialmuhammad456778Ainda não há avaliações
- Vertical Parabolic CurvesDocumento56 páginasVertical Parabolic CurvesLine PestañoAinda não há avaliações
- Lecture 5-Calculation of Invert Levels: Engr. Gul-E-HinaDocumento15 páginasLecture 5-Calculation of Invert Levels: Engr. Gul-E-HinajahanzaibchAinda não há avaliações
- Topic 4 Part D SuperelevationDocumento7 páginasTopic 4 Part D SuperelevationKaram JaradatAinda não há avaliações