Você também pode gostar
- MWH TF Ò: Ïu©Lh GutDocumento48 páginasMWH TF Ò: Ïu©Lh GutDinesh Kumar TAinda não há avaliações
- Sathyabama University: Jeppiaar Nagar, Rajiv Gandhi Salai, Chennai - 119Documento42 páginasSathyabama University: Jeppiaar Nagar, Rajiv Gandhi Salai, Chennai - 119Renuka VenkatesanAinda não há avaliações
- Std07 II MSSS TM 1Documento61 páginasStd07 II MSSS TM 1Sankar AmiAinda não há avaliações
- MWH TF Ò: Ïu©Lh GutDocumento48 páginasMWH TF Ò: Ïu©Lh GutDinesh Kumar TAinda não há avaliações
- DSPDocumento2 páginasDSPDinesh Kumar TAinda não há avaliações
- European Patent ApplicationDocumento12 páginasEuropean Patent ApplicationDinesh Kumar TAinda não há avaliações
- 11 Lab 01Documento13 páginas11 Lab 01Dinesh Kumar TAinda não há avaliações
- StudiesDocumento8 páginasStudiesDinesh Kumar TAinda não há avaliações
- InformationDocumento2 páginasInformationDinesh Kumar TAinda não há avaliações
- Papers For TestingDocumento7 páginasPapers For TestingDinesh Kumar TAinda não há avaliações
- Capture Mixed SignalDocumento11 páginasCapture Mixed SignalDinesh Kumar TAinda não há avaliações
- DDRPT - Program For AdderdocxDocumento4 páginasDDRPT - Program For AdderdocxDinesh Kumar TAinda não há avaliações
- Mtech Vlsi - Second SemDocumento16 páginasMtech Vlsi - Second SemDinesh Kumar TAinda não há avaliações
- Microwind Design RulesDocumento110 páginasMicrowind Design Rulestuhinr007100% (3)
- Bass Study Material - Circuit For Detail Expl - Ain...Documento1 páginaBass Study Material - Circuit For Detail Expl - Ain...Dinesh Kumar TAinda não há avaliações
- Discrete Fourier Transform PDFDocumento12 páginasDiscrete Fourier Transform PDFKarina5274Ainda não há avaliações
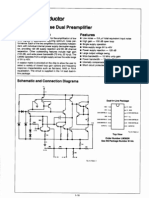
- LM 382Documento4 páginasLM 382Dinesh Kumar TAinda não há avaliações
- Fun DmaDocumento7 páginasFun DmaDinesh Kumar TAinda não há avaliações
- Amplificadores LM PDFDocumento8 páginasAmplificadores LM PDFJhonny IDAinda não há avaliações
- PSpice ExperimentDocumento7 páginasPSpice ExperimentMustapha BeziouiAinda não há avaliações
- Adaptive filters in digital signal processingDocumento1 páginaAdaptive filters in digital signal processingDinesh Kumar TAinda não há avaliações
- Dma ImplementationDocumento5 páginasDma ImplementationDinesh Kumar TAinda não há avaliações
- Pspice TutorialDocumento10 páginasPspice TutorialDinesh Kumar TAinda não há avaliações
- PSpice ExperimentDocumento7 páginasPSpice ExperimentMustapha BeziouiAinda não há avaliações
- Pspice BJT CurvesDocumento2 páginasPspice BJT CurvesDinesh Kumar TAinda não há avaliações
- kVA and KWDocumento2 páginaskVA and KWsporsylar100% (1)
- Wireless Network Planning and OperationDocumento1 páginaWireless Network Planning and OperationDinesh Kumar TAinda não há avaliações
- Bosch PAPERDocumento14 páginasBosch PAPERDinesh Kumar TAinda não há avaliações
- Ec 2007Documento11 páginasEc 2007mallanna4blogsAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Descargar Driver para Modem Axesstel Cdma 1xev-DoDocumento2 páginasDescargar Driver para Modem Axesstel Cdma 1xev-DoHiuden HiudenAinda não há avaliações
- Marvell 88q4364 Automotive Product BriefDocumento2 páginasMarvell 88q4364 Automotive Product BriefBeyond TechnologyAinda não há avaliações
- HDLC, PPP & Slip P: RotocolsDocumento34 páginasHDLC, PPP & Slip P: Rotocolsvarun2313676Ainda não há avaliações
- High Speed NCM (HS-NCM)Documento20 páginasHigh Speed NCM (HS-NCM)tuandanhbk10Ainda não há avaliações
- Motherboard Half-Product Part NumbersDocumento8 páginasMotherboard Half-Product Part NumbersNguyễn Hoàng SơnAinda não há avaliações
- Hiper Lan (High Performance Radio LAN) : by Assistant Professor (Senior), Department of ECEDocumento16 páginasHiper Lan (High Performance Radio LAN) : by Assistant Professor (Senior), Department of ECEsaisuneelademAinda não há avaliações
- PC Maintenance Lab ReportDocumento21 páginasPC Maintenance Lab ReportSoma SahaAinda não há avaliações
- DELL XPS 13-9350 AAZ80 LA-C881P r1.0 A00Documento59 páginasDELL XPS 13-9350 AAZ80 LA-C881P r1.0 A00nomi_nomi100% (1)
- Archer T600U Plus (EU) 1.0 - DatasheetDocumento5 páginasArcher T600U Plus (EU) 1.0 - DatasheetThojAinda não há avaliações
- Ds-3E0518P-E/M 16-Port Gigabit Unmanaged Poe Switch: Feature and FunctionDocumento5 páginasDs-3E0518P-E/M 16-Port Gigabit Unmanaged Poe Switch: Feature and FunctionSandeep KamatAinda não há avaliações
- Config Mtu NexusDocumento4 páginasConfig Mtu Nexustelco2011Ainda não há avaliações
- RS-232, 422 or 485 Signals Up To 2.5 Miles With Fiber Optic ModemDocumento6 páginasRS-232, 422 or 485 Signals Up To 2.5 Miles With Fiber Optic ModemVictor QuinteroAinda não há avaliações
- 01 Workshop-3G Optimisation - Sales ClusterDocumento96 páginas01 Workshop-3G Optimisation - Sales ClusterbullsidhAinda não há avaliações
- Ethernet Overview: Chapter 6 - Ethernet Design © 1996, BICSI LAN Design Manual - CD-ROM, Issue 1Documento56 páginasEthernet Overview: Chapter 6 - Ethernet Design © 1996, BICSI LAN Design Manual - CD-ROM, Issue 1Rajesh SaxenaAinda não há avaliações
- AR9271Documento2 páginasAR9271djfir0Ainda não há avaliações
- CPE Installation & ConfigurationDocumento20 páginasCPE Installation & Configurationalex1000man100% (1)
- M040 Data SheetDocumento2 páginasM040 Data SheetY.EbadiAinda não há avaliações
- NTC/2080/Zx SeriesDocumento4 páginasNTC/2080/Zx Seriesagj18Ainda não há avaliações
- CT - AFD.01.eLM - Certification - Test Version 1.3Documento5 páginasCT - AFD.01.eLM - Certification - Test Version 1.3pc100xohmAinda não há avaliações
- IPMH61G1 Block DiagramDocumento30 páginasIPMH61G1 Block Diagramsilas estevam0% (1)
- GSM Handover Sharing Sharing GuysDocumento50 páginasGSM Handover Sharing Sharing GuysAnonymous ofwB20r0sAinda não há avaliações
- HP 430 - 431 - 435 - 630 Cq43 Foxconn Chicago Montevina Uma Tpn-f101tpn-f102 Rev 0.1 SchematicsDocumento46 páginasHP 430 - 431 - 435 - 630 Cq43 Foxconn Chicago Montevina Uma Tpn-f101tpn-f102 Rev 0.1 SchematicsMalith UdayangaAinda não há avaliações
- AX99100 BriefDocumento2 páginasAX99100 BriefQian Zwei ShengAinda não há avaliações
- Flash OFDMDocumento15 páginasFlash OFDMAjai Govind GAinda não há avaliações
- CCTV and IP Phone Network DiagramDocumento1 páginaCCTV and IP Phone Network DiagramAshnoor KhanAinda não há avaliações
- K468 Top-2 MB 10259-1 48.4in01.01Documento46 páginasK468 Top-2 MB 10259-1 48.4in01.01Gilberto GomesAinda não há avaliações
- B.N.M. Institute of Technology: Department of Electronics & Communication Engineering Question Bank With SolutionsDocumento21 páginasB.N.M. Institute of Technology: Department of Electronics & Communication Engineering Question Bank With SolutionsNeha YaĐavAinda não há avaliações
- 25 Pin Spectra Accessory Connector Female (Accys) Connector: Facing SocketsDocumento1 página25 Pin Spectra Accessory Connector Female (Accys) Connector: Facing SocketsKen CechuraAinda não há avaliações
- Bdae1 SATELLITE L300 L305 INVENTEC PS10S (6050A2170401-MB-A03)Documento63 páginasBdae1 SATELLITE L300 L305 INVENTEC PS10S (6050A2170401-MB-A03)Rommel LoayzaAinda não há avaliações
- Chapter 9Documento64 páginasChapter 9Parag Kumbhar07Ainda não há avaliações