Você também pode gostar
- ProTech203 PDFDocumento4 páginasProTech203 PDFmehdi227Ainda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Noise Suppression by Low-Pass Filters 3.5. The Effect of Non Ideal CapacitorsDocumento5 páginasNoise Suppression by Low-Pass Filters 3.5. The Effect of Non Ideal Capacitorsmehdi227Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- 31000, 32000 Proximity Probe Housings: DescriptionDocumento9 páginas31000, 32000 Proximity Probe Housings: Descriptionmehdi227Ainda não há avaliações
- Head and Well RefDocumento5 páginasHead and Well Refmehdi227Ainda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- 007 Thread DimDocumento1 página007 Thread Dimmehdi227Ainda não há avaliações
- 3300 System Compatibility Guide: Operation ManualDocumento23 páginas3300 System Compatibility Guide: Operation Manualmehdi227Ainda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Thermowells: Temperature MeasurementDocumento4 páginasThermowells: Temperature Measurementmehdi227Ainda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Sira Technical File FORM9121Documento2 páginasSira Technical File FORM9121mehdi227Ainda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Hermowells: Thermowell Design and Selection CriteriaDocumento1 páginaHermowells: Thermowell Design and Selection Criteriamehdi227Ainda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Bolting Dimensions 125 - 250 LB Flange SteelDocumento1 páginaBolting Dimensions 125 - 250 LB Flange Steelmehdi227Ainda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- ATEX 137 DatasheetDocumento4 páginasATEX 137 DatasheetManikanda PrabhuAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Guide To Hazardous Locations: Causes of ExplosionsDocumento1 páginaGuide To Hazardous Locations: Causes of Explosionsmehdi227Ainda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Increment TextDocumento8 páginasIncrement Textmehdi227Ainda não há avaliações
- AA STD 000025 Control RoomDocumento43 páginasAA STD 000025 Control Roommehdi227Ainda não há avaliações
- Name: Mehdi Hosseini Date: 5/17/2013 Employed: Clor: YellowDocumento1 páginaName: Mehdi Hosseini Date: 5/17/2013 Employed: Clor: Yellowmehdi227Ainda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- News 210 Spanish Etl Etc EflDocumento2 páginasNews 210 Spanish Etl Etc EflespernancacionAinda não há avaliações
- Pec Objective Reviewer NewDocumento450 páginasPec Objective Reviewer NewJOMAR MISLANG100% (1)
- KontolDocumento144 páginasKontolAnonymous ssieDC50% (2)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Electronics Washing Machine ControlDocumento4 páginasElectronics Washing Machine ControlMohd ShukriAinda não há avaliações
- 4.3 Revision Notes Electric CircuitsDocumento25 páginas4.3 Revision Notes Electric Circuitsbipin jainAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Optimize Hitachi Storage and Server Platforms in Vmware Vsphere 5 5 Environments Best Practices Guide PDFDocumento49 páginasOptimize Hitachi Storage and Server Platforms in Vmware Vsphere 5 5 Environments Best Practices Guide PDFLars GlöcknerAinda não há avaliações
- Motors and The NECDocumento10 páginasMotors and The NECMike AdvinculaAinda não há avaliações
- Manuel Radiocommande Futaba FP-9vhpDocumento28 páginasManuel Radiocommande Futaba FP-9vhpSébastien MunozAinda não há avaliações
- Service Manual: KD-27FS130Documento76 páginasService Manual: KD-27FS130André LeftAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- TOX ElectricDrive 40 200905 UsDocumento24 páginasTOX ElectricDrive 40 200905 UsRay SmeltzerAinda não há avaliações
- The MOSFET Unity Gain FrequencyDocumento2 páginasThe MOSFET Unity Gain Frequencyhariansyah0Ainda não há avaliações
- 1 - Manual NA003 M64 Version 01.11.01C - enDocumento115 páginas1 - Manual NA003 M64 Version 01.11.01C - enelektrocentarAinda não há avaliações
- Allgon 7740.00Documento2 páginasAllgon 7740.00Vlad ManAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Kahlenberg M-512 Fog HornDocumento2 páginasKahlenberg M-512 Fog HorntariktunadAinda não há avaliações
- DPS Ibak en PDFDocumento9 páginasDPS Ibak en PDFjsenadAinda não há avaliações
- Original Drivers and Sadassdafor VPCCW1 Series (Windows 7 64 Bit) - Download - Sony Asia PacificDocumento6 páginasOriginal Drivers and Sadassdafor VPCCW1 Series (Windows 7 64 Bit) - Download - Sony Asia PacificAnthony FoeAinda não há avaliações
- KRF-V4080D KRF-V5580D: Instruction ManualDocumento36 páginasKRF-V4080D KRF-V5580D: Instruction ManualCostin DraghiaAinda não há avaliações
- UCPDocumento0 páginaUCPcontact_egypt2Ainda não há avaliações
- Datasheet LCDDocumento8 páginasDatasheet LCDSebasXR100% (1)
- 500 ISTQB Sample Papers - Answers - Istqb - Guru PDFDocumento13 páginas500 ISTQB Sample Papers - Answers - Istqb - Guru PDFTheRocket ShowAinda não há avaliações
- DSE 4510 Dse4520 Operator ManualDocumento64 páginasDSE 4510 Dse4520 Operator ManualPedro100% (5)
- MECH261 Control Principles: Tutorial #3Documento27 páginasMECH261 Control Principles: Tutorial #3Krushnasamy SuramaniyanAinda não há avaliações
- Indesit Idce745euDocumento13 páginasIndesit Idce745euMилош ЛукићAinda não há avaliações
- M2N-SLI DELUXE Memory QVL (09222006) PDFDocumento3 páginasM2N-SLI DELUXE Memory QVL (09222006) PDFPersiusalAinda não há avaliações
- IGBT - Field Stop, Trench FGH40T120SMD, FGH40T120SMD-F155: DescriptionDocumento11 páginasIGBT - Field Stop, Trench FGH40T120SMD, FGH40T120SMD-F155: DescriptionSerjik FremenAinda não há avaliações
- Unit 4 Electrical DrivesDocumento16 páginasUnit 4 Electrical DrivesVaishnavi BharatiAinda não há avaliações
- Relay Details SL - No - Protection Make Type/ModelDocumento2 páginasRelay Details SL - No - Protection Make Type/Modelsherub wangdiAinda não há avaliações
- 1000 KVA DG Generator ParametersDocumento14 páginas1000 KVA DG Generator ParametersdinukaeeAinda não há avaliações
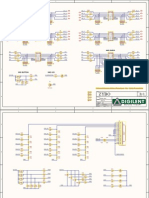
- PG 3 ZYBO - SCHDocumento13 páginasPG 3 ZYBO - SCHanuptonemeAinda não há avaliações
- BJT Cross ReferenceDocumento7 páginasBJT Cross ReferenceNoel BalugoAinda não há avaliações
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tNo EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tNota: 4.5 de 5 estrelas4.5/5 (27)
- Digital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosNo EverandDigital Filmmaking: The Ultimate Guide to Web Video Production for Beginners and Non-Professionals, Learn Useful Tips and Advice on How You Can Create, Film and Edit Your VideosNota: 5 de 5 estrelas5/5 (1)