Você também pode gostar
- Station KeepingDocumento67 páginasStation KeepingSagar MhatreAinda não há avaliações
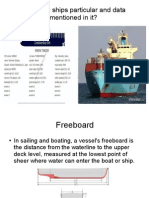
- Free BoardDocumento4 páginasFree BoardIan StefanusAinda não há avaliações
- Load Line: Ship DesignDocumento89 páginasLoad Line: Ship DesignMuhammed Talha ÖzdenoğluAinda não há avaliações
- Ferry Open Freeboard CalculationDocumento3 páginasFerry Open Freeboard CalculationgsoldatosAinda não há avaliações
- Scantling 161001223025Documento8 páginasScantling 161001223025Hoang Tien Dung100% (1)
- Main Ship Characteristics: Froude Number (FN)Documento6 páginasMain Ship Characteristics: Froude Number (FN)Zakiah KartiniAinda não há avaliações
- Tonnage Calculations: M/V Ottawa IvDocumento6 páginasTonnage Calculations: M/V Ottawa Ivtahtoh25Ainda não há avaliações
- BTF141101 Freeboard Basel S5Documento16 páginasBTF141101 Freeboard Basel S5tahtoh25100% (1)
- Shafting CalculationsDocumento4 páginasShafting Calculationsmohammad shihabAinda não há avaliações
- On Basis Ship DesignDocumento75 páginasOn Basis Ship DesignRENGANATHAN P100% (1)
- Rules For The Towing Survay of Barges and Tugboats - KRSDocumento13 páginasRules For The Towing Survay of Barges and Tugboats - KRSDave PallanAinda não há avaliações
- Na 3007 - Launching CalculationDocumento5 páginasNa 3007 - Launching CalculationYe Win ThantAinda não há avaliações
- Draft Survey CalculationDocumento5 páginasDraft Survey CalculationFarrukh Ali Kazim100% (1)
- Damage Stability CalculationsDocumento12 páginasDamage Stability CalculationsleotvrdeAinda não há avaliações
- STABILITY CALCULATION TonyDocumento5 páginasSTABILITY CALCULATION TonyTony KusumartonoAinda não há avaliações
- FreeboardDocumento12 páginasFreeboardRodneyAinda não há avaliações
- Final Brochure SSPLDocumento21 páginasFinal Brochure SSPLrajkumar_gitamAinda não há avaliações
- Explanatory Notes To The Solas Chapter II-1 Subdivision andDocumento35 páginasExplanatory Notes To The Solas Chapter II-1 Subdivision andWong Yong WaiAinda não há avaliações
- Angle Steeldata PDFDocumento2 páginasAngle Steeldata PDFRaj P. AbhaleAinda não há avaliações
- Determining Critical Wind Velocity For Dragging AnchorDocumento2 páginasDetermining Critical Wind Velocity For Dragging AnchorOctavianAinda não há avaliações
- Basic Ship Theory Chapter 6 Problem No 12, 13Documento4 páginasBasic Ship Theory Chapter 6 Problem No 12, 13yan9naing9shinAinda não há avaliações
- ST 703 Ship Design Ii: Calculation and Assignment of FreeboardDocumento27 páginasST 703 Ship Design Ii: Calculation and Assignment of FreeboardJaya Sanker100% (1)
- 03) Draft SurveyDocumento2 páginas03) Draft SurveyNoom' Noppasin100% (3)
- Stability Info BookletDocumento15 páginasStability Info BookletShailja ChetanAinda não há avaliações
- Stability CriteriaDocumento7 páginasStability CriteriaSuperducksAinda não há avaliações
- Rudder and Steering CalculationDocumento5 páginasRudder and Steering CalculationFrozen Naive100% (1)
- Rudder CalculationDocumento8 páginasRudder CalculationGerard SargAinda não há avaliações
- Anchor Chain Locker Volume CalculationDocumento1 páginaAnchor Chain Locker Volume Calculationbasant_konatAinda não há avaliações
- PDFDocumento5 páginasPDFSameera JayaratneAinda não há avaliações
- Freeboard CalculationDocumento45 páginasFreeboard CalculationgksahaAinda não há avaliações
- Scantling Calc SpreadsheetDocumento92 páginasScantling Calc Spreadsheettyagimohit228Ainda não há avaliações
- Scantling CalculationsDocumento70 páginasScantling Calculationsjrladdu100% (4)
- Catenary Mooring Line Shape Tool (Version 1)Documento1 páginaCatenary Mooring Line Shape Tool (Version 1)Ninad Anil Bhaskarwar oe21m012Ainda não há avaliações
- Calculation of Deck Strenght When Longitudinal Girders Are 3100mm Away and No Supports in BetweenDocumento6 páginasCalculation of Deck Strenght When Longitudinal Girders Are 3100mm Away and No Supports in BetweennaseemtycheAinda não há avaliações
- VESSEL Draft Survey ReportDocumento1 páginaVESSEL Draft Survey ReportSailee Korde100% (1)
- Stability Calculation Form For MV MaineborgDocumento9 páginasStability Calculation Form For MV MaineborgtrananhnganAinda não há avaliações
- Trim Stability BasicDocumento64 páginasTrim Stability Basicdakidofdaboom80% (5)
- ET Inc Exp NotesDocumento7 páginasET Inc Exp NotesOrville monteiroAinda não há avaliações
- General Specification of PCTC VesselDocumento12 páginasGeneral Specification of PCTC VesselLiviu VladAinda não há avaliações
- 12217-1 Worksheet 1-2-3-4-5Documento7 páginas12217-1 Worksheet 1-2-3-4-5yunus ahmet ilhanAinda não há avaliações
- Longitudinal Strength Calculation Report - R2 PDFDocumento50 páginasLongitudinal Strength Calculation Report - R2 PDFAwwalin Bocah Ilang100% (1)
- Free Board CalculationDocumento1 páginaFree Board CalculationPilippenge Asanka Iraj LaknathaAinda não há avaliações
- Naval Arch - Incline TestDocumento11 páginasNaval Arch - Incline TestDheerajKaushalAinda não há avaliações
- The Ship Model Stability Handbook: Please NoteDocumento8 páginasThe Ship Model Stability Handbook: Please NoteMohsen FarmanyAinda não há avaliações
- Mooring Operations and Unmooring OperationsDocumento30 páginasMooring Operations and Unmooring OperationsK.Prassindren S.KumarasingamAinda não há avaliações
- Coefficients of Form - Ship's Waterplane, Block, Midship and Prismatic CoefficientDocumento5 páginasCoefficients of Form - Ship's Waterplane, Block, Midship and Prismatic CoefficientGiorgi KandelakiAinda não há avaliações
- Stability and Loading Scenario 58Documento3 páginasStability and Loading Scenario 58Laurencia LaveniaAinda não há avaliações
- Bollard Pull CalculationsDocumento16 páginasBollard Pull CalculationsLuis Sierra100% (1)
- Preliminary Capacity PlanDocumento10 páginasPreliminary Capacity PlantheyagarajanAinda não há avaliações
- Hydromax ManualDocumento252 páginasHydromax Manualmanon160100% (1)
- Input: Versie 1.2.1Documento24 páginasInput: Versie 1.2.1Tihomir Markovic0% (2)
- Stresses and Strains in ShipsDocumento3 páginasStresses and Strains in Shipskuldeepasingh75% (4)
- 5 Longitudinal StreghtDocumento24 páginas5 Longitudinal StreghtSiOlyel Mst 'd-caLm'Ainda não há avaliações
- Typical Towing Patterns ADocumento3 páginasTypical Towing Patterns AP Venkata SureshAinda não há avaliações
- MV AzzirDocumento106 páginasMV AzzirDominic VillamanteAinda não há avaliações
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsAinda não há avaliações
- Flexible Evaluation Mechanism (FEM) Understanding Culture Society and PoliticsDocumento1 páginaFlexible Evaluation Mechanism (FEM) Understanding Culture Society and Politicsgenesisgamaliel montecinoAinda não há avaliações
- Aub Updated-1 PDFDocumento87 páginasAub Updated-1 PDFEvelyn Pamela Espinoza Morales100% (2)
- Convekta Training MethodsDocumento9 páginasConvekta Training MethodsTech PadawanAinda não há avaliações
- Analysis of Austenitic Stainless Steel by Spark Atomic Emission SpectrometryDocumento5 páginasAnalysis of Austenitic Stainless Steel by Spark Atomic Emission SpectrometryVasu RajaAinda não há avaliações
- Morality and Pedophilia in LolitaDocumento5 páginasMorality and Pedophilia in LolitaDiana Alexa0% (1)
- 182021.04.23 Perfect ContinuousDocumento2 páginas182021.04.23 Perfect ContinuousadrianbulahkobetsAinda não há avaliações
- Chap 005Documento13 páginasChap 005Mohammad ElabedAinda não há avaliações
- Elements of User Interface DesignDocumento30 páginasElements of User Interface DesignRomer Garcia100% (1)
- A Seminar Report On Soft Skills: Submitted To Visvesvaraya Technological University, BelgaumDocumento18 páginasA Seminar Report On Soft Skills: Submitted To Visvesvaraya Technological University, Belgaumvishal vallapure100% (1)
- Foe - PP v. Tomines - 9october2017Documento4 páginasFoe - PP v. Tomines - 9october2017Faith Roslyndale Fidés100% (1)
- Review Paper On Three Phase Fault AnalysisDocumento6 páginasReview Paper On Three Phase Fault AnalysisPritesh Singh50% (2)
- Seven Years WarDocumento55 páginasSeven Years WarKismat Dhaliwal100% (1)
- Grade 5 DLL Science 5 q1 Week 2aDocumento4 páginasGrade 5 DLL Science 5 q1 Week 2aTrese OliveAinda não há avaliações
- A Short History of The IsmailisDocumento30 páginasA Short History of The IsmailisAbbas100% (1)
- MBA ABM SyllabusDocumento33 páginasMBA ABM Syllabuszinga007Ainda não há avaliações
- Recount TextDocumento17 páginasRecount TextalunaAinda não há avaliações
- Ejercicios de Relative ClausesDocumento1 páginaEjercicios de Relative ClausesRossyAinda não há avaliações
- NameDocumento16 páginasNameAfro BertAinda não há avaliações
- N4 Fortran Codes For Computing The Space-Time Correlations of Turbulent Flow in A ChannelDocumento47 páginasN4 Fortran Codes For Computing The Space-Time Correlations of Turbulent Flow in A Channelabhi71127112Ainda não há avaliações
- Picaresque Novel B. A. Part 1 EnglishDocumento3 páginasPicaresque Novel B. A. Part 1 EnglishIshan KashyapAinda não há avaliações
- Cost Accounting and Management Essentials You Always Wanted To Know: 4th EditionDocumento21 páginasCost Accounting and Management Essentials You Always Wanted To Know: 4th EditionVibrant Publishers100% (1)
- ProbabilityDocumento29 páginasProbabilitymaryroseAinda não há avaliações
- Assessing Implicit Motives With An Online VersionDocumento16 páginasAssessing Implicit Motives With An Online VersionWunderkindAinda não há avaliações
- SID3004 Report Writing Sep2023-CompressedDocumento39 páginasSID3004 Report Writing Sep2023-CompressedU2004743 STUDENTAinda não há avaliações
- Mechanics of Materials Lab 1-Zip Tie Tensile TestingDocumento7 páginasMechanics of Materials Lab 1-Zip Tie Tensile TestingcoolshavaAinda não há avaliações
- Process Audit Manual 030404Documento48 páginasProcess Audit Manual 030404azadsingh1Ainda não há avaliações
- Graduate Alumni of Elvel School Class of 1991Documento3 páginasGraduate Alumni of Elvel School Class of 1991Ramón SilvaAinda não há avaliações
- Print Your Name / #Include #Include Void Main (CLRSCR Printf ("My Name Is Pankaj") Getch )Documento35 páginasPrint Your Name / #Include #Include Void Main (CLRSCR Printf ("My Name Is Pankaj") Getch )Saurav AmbasthaAinda não há avaliações
- Chapter 14 Chemical EquilibriumDocumento29 páginasChapter 14 Chemical EquilibriumlynloeAinda não há avaliações
- Karrnathi Undead P2Documento2 páginasKarrnathi Undead P2Monjis MonjasAinda não há avaliações