Você também pode gostar
- EUSIPCO 2013 1569744705: Noise Uncertainty Analysis of Energy Detector: Bounded and Unbounded Approximation RelationshipDocumento4 páginasEUSIPCO 2013 1569744705: Noise Uncertainty Analysis of Energy Detector: Bounded and Unbounded Approximation Relationshipsuchi87Ainda não há avaliações
- Lec Set 1 Data AnalysisDocumento55 páginasLec Set 1 Data AnalysisSmarika KulshresthaAinda não há avaliações
- BSP Exp#2Documento9 páginasBSP Exp#2Hasnain QadarAinda não há avaliações
- Lecture 2 2014 Random Errors in Chemical AnalysisDocumento24 páginasLecture 2 2014 Random Errors in Chemical AnalysisRobert EdwardsAinda não há avaliações
- Calibration and Figures of Merit in Chem 311Documento33 páginasCalibration and Figures of Merit in Chem 311Paul Venson RaraAinda não há avaliações
- DCL 1Documento6 páginasDCL 1ALIAinda não há avaliações
- A Drift Correction ProcedureDocumento7 páginasA Drift Correction ProcedureLukluk KhairiyatiAinda não há avaliações
- 2016 Autumn Instrumental AnalysisDocumento33 páginas2016 Autumn Instrumental AnalysisNguyen Nguyen ThanhAinda não há avaliações
- BDSP Lecture 2Documento53 páginasBDSP Lecture 2Mohammed FarisAinda não há avaliações
- Radio (CR) Has Been Developed To Utilize The Spectrum in An Efficient Manner - in CognitiveDocumento7 páginasRadio (CR) Has Been Developed To Utilize The Spectrum in An Efficient Manner - in Cognitiveriya soniAinda não há avaliações
- 1-Introduction To Analytical ChemistryDocumento181 páginas1-Introduction To Analytical ChemistryFernando Dwi AgustiaAinda não há avaliações
- CAPE - Module 2 - Uncertainty in MeasurmentsDocumento9 páginasCAPE - Module 2 - Uncertainty in MeasurmentsMike AuxlongAinda não há avaliações
- Sampling Theory: Session 8Documento24 páginasSampling Theory: Session 8Anish DharAinda não há avaliações
- MODULE 2 Foundations of PhysicsDocumento7 páginasMODULE 2 Foundations of PhysicschloeAinda não há avaliações
- Lecture 3 2014 Statistical Data Treatment and EvaluationDocumento44 páginasLecture 3 2014 Statistical Data Treatment and EvaluationRobert EdwardsAinda não há avaliações
- Calibration: Constructing A Calibration CurveDocumento10 páginasCalibration: Constructing A Calibration Curvedéborah_rosalesAinda não há avaliações
- Sampled Data Systems: Sampling Effects of SamplingDocumento25 páginasSampled Data Systems: Sampling Effects of SamplingyjartesnAinda não há avaliações
- Counting Statistics: Radiation Detect & Measure, Summer 2005 (RSM)Documento15 páginasCounting Statistics: Radiation Detect & Measure, Summer 2005 (RSM)shahabAinda não há avaliações
- Digital Transmission: Sampling QuantizationDocumento23 páginasDigital Transmission: Sampling QuantizationbehayluAinda não há avaliações
- DSP Lab 1: Continuous to Discrete Time ConversionDocumento12 páginasDSP Lab 1: Continuous to Discrete Time ConversionAmin SyatirAinda não há avaliações
- General Physics 1 (Module 4)Documento8 páginasGeneral Physics 1 (Module 4)Jhunner BuanAinda não há avaliações
- DSP SamplingDocumento36 páginasDSP Samplingin_visible100% (1)
- Cyclostationary Spectrum Sensing for Cognitive Radio MIMO SystemsDocumento13 páginasCyclostationary Spectrum Sensing for Cognitive Radio MIMO Systemsriya soniAinda não há avaliações
- Ejercicios de DSP Estudiar PruebaDocumento16 páginasEjercicios de DSP Estudiar PruebaLuis BritoAinda não há avaliações
- Xyz 1Documento20 páginasXyz 12406icecreamAinda não há avaliações
- Assignment 3Documento8 páginasAssignment 3satyaseshadriAinda não há avaliações
- CH 501-Lecture-01Documento56 páginasCH 501-Lecture-01Vihanga SenanayakeAinda não há avaliações
- Detection LimitsDocumento14 páginasDetection LimitsLuis Francisco Santos SuarezAinda não há avaliações
- Sampling TeoremaNyquistDocumento27 páginasSampling TeoremaNyquistJCAinda não há avaliações
- Compressed SensingDocumento18 páginasCompressed SensingRobin TimkangAinda não há avaliações
- Review of Basic Concepts/Solutions and Their ConcentrationsDocumento109 páginasReview of Basic Concepts/Solutions and Their ConcentrationsImad AghilaAinda não há avaliações
- 16 Foster Cs 0904Documento57 páginas16 Foster Cs 0904Нини СтанимироваAinda não há avaliações
- Basic Statistics Concepts for Environmental Data AnalysisDocumento7 páginasBasic Statistics Concepts for Environmental Data AnalysisAsini Gavinya SirinimalAinda não há avaliações
- Quantitative Analysis - Donald E. Leyden, Department of Chemistry, Colorado State UniversityDocumento7 páginasQuantitative Analysis - Donald E. Leyden, Department of Chemistry, Colorado State UniversitymaulidinbAinda não há avaliações
- Data Communication Note 6 PDFDocumento12 páginasData Communication Note 6 PDFShahariar Kabir ShuvoAinda não há avaliações
- Method Validation On Drug SubstancesDocumento41 páginasMethod Validation On Drug SubstancesSrikanth NagabiruAinda não há avaliações
- Chapter 5: Signals and Noise: RSD 1 S X Mean of Dev STD Mean N SDocumento10 páginasChapter 5: Signals and Noise: RSD 1 S X Mean of Dev STD Mean N SHai PhamAinda não há avaliações
- Energy Detectiion of Unknown Deterministic Signals by Harry UrkowitzDocumento9 páginasEnergy Detectiion of Unknown Deterministic Signals by Harry UrkowitzZARGHAM KHANAinda não há avaliações
- Analytically ChemistryDocumento24 páginasAnalytically ChemistryWaleed El-azab100% (1)
- 11exam#1 - Solution KeyDocumento6 páginas11exam#1 - Solution KeyTaylor DavisAinda não há avaliações
- Department of Electronics & Control Engineering SECX1028 - Digital Signal Processing Unit-Iv Multi Rate Digital Signal ProcessingDocumento16 páginasDepartment of Electronics & Control Engineering SECX1028 - Digital Signal Processing Unit-Iv Multi Rate Digital Signal ProcessingS.DurgaAinda não há avaliações
- DSP Techniques Power Spectrum Estimation LabDocumento3 páginasDSP Techniques Power Spectrum Estimation LabJai GaizinAinda não há avaliações
- SampleDocumento4 páginasSampleasgharkhanAinda não há avaliações
- Chapter 6 - Sampling TheoryDocumento32 páginasChapter 6 - Sampling TheoryMuhammad AljamalAinda não há avaliações
- ColorimetryDocumento23 páginasColorimetryMary Helen100% (1)
- LodDocumento2 páginasLodBob CutterAinda não há avaliações
- New Method For The Statistical Evaluation of Rfi MeasurementsDocumento6 páginasNew Method For The Statistical Evaluation of Rfi MeasurementsDianeAinda não há avaliações
- Unit 1Documento175 páginasUnit 1Karthikeya SharmaAinda não há avaliações
- 003 - Calculating Beam SpreadDocumento9 páginas003 - Calculating Beam SpreadNicko Arya DharmaAinda não há avaliações
- "Universidad Tecnológica Equinoccial" Redes: Teorema de Nyquist-ShannonDocumento2 páginas"Universidad Tecnológica Equinoccial" Redes: Teorema de Nyquist-ShannonDaniela AlejandraAinda não há avaliações
- Instrument Fundamentals Complete GuideDocumento116 páginasInstrument Fundamentals Complete GuideDouâtCarlosAinda não há avaliações
- Radioactive Decay Experiment ReportDocumento9 páginasRadioactive Decay Experiment ReportMonique DesrochersAinda não há avaliações
- Error and Data AnalysisDocumento38 páginasError and Data AnalysisisiberisAinda não há avaliações
- Problemas DSPDocumento18 páginasProblemas DSPJeremy DiazAinda não há avaliações
- Sampling and Nyquist Rate: Experiment No: 08Documento6 páginasSampling and Nyquist Rate: Experiment No: 08abstudio0049Ainda não há avaliações
- DSP Lecture-3: 1 Integral Convolution PrestDocumento17 páginasDSP Lecture-3: 1 Integral Convolution Prestمشاهير celebritiesAinda não há avaliações
- Practical Radio Frequency Test and Measurement: A Technician's HandbookNo EverandPractical Radio Frequency Test and Measurement: A Technician's HandbookNota: 5 de 5 estrelas5/5 (2)
- The Physics and Technology of Diagnostic Ultrasound: Study Guide (Second Edition)No EverandThe Physics and Technology of Diagnostic Ultrasound: Study Guide (Second Edition)Ainda não há avaliações
- Pass Ultrasound Physics Exam Study Guide ReviewNo EverandPass Ultrasound Physics Exam Study Guide ReviewNota: 4.5 de 5 estrelas4.5/5 (2)
- Hamiltonian Monte Carlo Methods in Machine LearningNo EverandHamiltonian Monte Carlo Methods in Machine LearningAinda não há avaliações
- Filtro de Linea de Agua DuraDocumento3 páginasFiltro de Linea de Agua Duradéborah_rosalesAinda não há avaliações
- Equipos de Aire PuroDocumento1 páginaEquipos de Aire Purodéborah_rosalesAinda não há avaliações
- ASB-60-220-C2 - SPEC Marca MRCDocumento1 páginaASB-60-220-C2 - SPEC Marca MRCdéborah_rosalesAinda não há avaliações
- Bodt-5 Spec PDFDocumento1 páginaBodt-5 Spec PDFdéborah_rosalesAinda não há avaliações
- Hvs 1Documento2 páginasHvs 1déborah_rosalesAinda não há avaliações
- Nir Ms 2000 c2f SpecDocumento1 páginaNir Ms 2000 c2f Specdéborah_rosalesAinda não há avaliações
- Weight S 5xafb610 SpecDocumento2 páginasWeight S 5xafb610 Specdéborah_rosalesAinda não há avaliações
- Bodt-5 OprDocumento14 páginasBodt-5 Oprdéborah_rosalesAinda não há avaliações
- ASB-60-220-C2 - SPEC Marca MRCDocumento1 páginaASB-60-220-C2 - SPEC Marca MRCdéborah_rosalesAinda não há avaliações
- P311 DatasheetDocumento2 páginasP311 Datasheetdéborah_rosalesAinda não há avaliações
- High Speed CentrifugeDocumento8 páginasHigh Speed Centrifugedéborah_rosalesAinda não há avaliações
- ASB-60-220-C2 - SPEC Marca MRCDocumento1 páginaASB-60-220-C2 - SPEC Marca MRCdéborah_rosalesAinda não há avaliações
- Testing Sieves Principles and Procedures PDFDocumento24 páginasTesting Sieves Principles and Procedures PDFelektron2010Ainda não há avaliações
- Bench Top Freeze DryerDocumento3 páginasBench Top Freeze Dryerdéborah_rosalesAinda não há avaliações
- Switching On Switching Off: Instruction Manual enDocumento1 páginaSwitching On Switching Off: Instruction Manual endéborah_rosalesAinda não há avaliações
- Hotplate Stirrer Brochure 2015Documento12 páginasHotplate Stirrer Brochure 2015déborah_rosalesAinda não há avaliações
- 340 BrochureDocumento8 páginas340 Brochuredéborah_rosalesAinda não há avaliações
- Handheld Alloy Analyzer for On-Site Material TestingDocumento9 páginasHandheld Alloy Analyzer for On-Site Material Testingdéborah_rosalesAinda não há avaliações
- Measurement Method: Measuring Loose PowderDocumento4 páginasMeasurement Method: Measuring Loose Powderdéborah_rosalesAinda não há avaliações
- 200mm Cube Mould Clamp Type. Cast Iron Construction. Stamped Mould Sections. en Compliant.Documento1 página200mm Cube Mould Clamp Type. Cast Iron Construction. Stamped Mould Sections. en Compliant.déborah_rosalesAinda não há avaliações
- Q-Smart850 Specs EN 052014Documento2 páginasQ-Smart850 Specs EN 052014déborah_rosalesAinda não há avaliações
- Instrumentacion Residuos Avanzados PDFDocumento2 páginasInstrumentacion Residuos Avanzados PDFdéborah_rosalesAinda não há avaliações
- Catalogo de Seguridad GRAINGERDocumento2 páginasCatalogo de Seguridad GRAINGERdéborah_rosalesAinda não há avaliações
- Colorflex Ez BrochureDocumento2 páginasColorflex Ez Brochuredéborah_rosalesAinda não há avaliações
- MM 5069 Measuring Flat Opaque Solids With Ultrascan ProDocumento4 páginasMM 5069 Measuring Flat Opaque Solids With Ultrascan Prodéborah_rosalesAinda não há avaliações
- TN HTB LasersDocumento7 páginasTN HTB Lasersdéborah_rosalesAinda não há avaliações
- Measurement Method: Measuring Loose PowderDocumento4 páginasMeasurement Method: Measuring Loose Powderdéborah_rosalesAinda não há avaliações
- Goren Microscope SpecDocumento1 páginaGoren Microscope Specdéborah_rosalesAinda não há avaliações
- TAXT PlusDocumento7 páginasTAXT Plusdéborah_rosalesAinda não há avaliações
- Refractometers EspecificacionesDocumento6 páginasRefractometers Especificacionesdéborah_rosalesAinda não há avaliações
- Ellipse Properties and GraphingDocumento24 páginasEllipse Properties and GraphingREBY ARANZOAinda não há avaliações
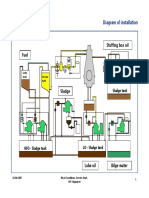
- Westfalia Separator Installation DiagramDocumento68 páginasWestfalia Separator Installation DiagramOno Jr Araza100% (3)
- Lecture Antenna MiniaturizationDocumento34 páginasLecture Antenna MiniaturizationJuhi GargAinda não há avaliações
- SERIES-90 180cc SERVICE BLN-2-41695 1997-05Documento52 páginasSERIES-90 180cc SERVICE BLN-2-41695 1997-05thailanAinda não há avaliações
- Iota Tangle 2.0: Toward A Scalable, Decentralized, Smart, and Autonomous Iot EcosystemDocumento8 páginasIota Tangle 2.0: Toward A Scalable, Decentralized, Smart, and Autonomous Iot EcosystemMarcos PonceAinda não há avaliações
- Math Let Reviewer 44 Analytic GeometryDocumento3 páginasMath Let Reviewer 44 Analytic Geometryjohn johnAinda não há avaliações
- Hospital Management System: A Project Report OnDocumento24 páginasHospital Management System: A Project Report OnRama GayariAinda não há avaliações
- Flow MeterDocumento9 páginasFlow MeterShin BoAinda não há avaliações
- Association of Genetic Variant Linked To Hemochromatosis With Brain Magnetic Resonance Imaging Measures of Iron and Movement DisordersDocumento10 páginasAssociation of Genetic Variant Linked To Hemochromatosis With Brain Magnetic Resonance Imaging Measures of Iron and Movement DisordersavinAinda não há avaliações
- Technical Data: That W IntoDocumento5 páginasTechnical Data: That W Intoradium7Ainda não há avaliações
- Short Term Load Forecast Using Fuzzy LogicDocumento9 páginasShort Term Load Forecast Using Fuzzy LogicRakesh KumarAinda não há avaliações
- Schindler Drive Chain MaintenanceDocumento9 páginasSchindler Drive Chain MaintenanceKevin aliAinda não há avaliações
- Template 8dDocumento165 páginasTemplate 8dLuis Alberto Quiroz GranadosAinda não há avaliações
- EEE415 Digital Image Processing: Frequency Domain FilteringDocumento50 páginasEEE415 Digital Image Processing: Frequency Domain FilteringFAISAL NAWABAinda não há avaliações
- Plain Bearings Made From Engineering PlasticsDocumento44 páginasPlain Bearings Made From Engineering PlasticsJani LahdelmaAinda não há avaliações
- EE - Revision Through Question - GATE - 2020 PDFDocumento138 páginasEE - Revision Through Question - GATE - 2020 PDFRamesh KumarAinda não há avaliações
- Norstar ICS Remote Tools, NRU Software Version 11Documento1 páginaNorstar ICS Remote Tools, NRU Software Version 11Brendan KeithAinda não há avaliações
- Ground Plane AntennaDocumento7 páginasGround Plane AntennaarijeetdguyAinda não há avaliações
- Chemistry Investigatory File Handmade NewDocumento17 páginasChemistry Investigatory File Handmade NewMadhusudan PeriwalAinda não há avaliações
- Daily production planning and capacity analysisDocumento27 páginasDaily production planning and capacity analysisahetAinda não há avaliações
- Certificate: Shear MachineDocumento3 páginasCertificate: Shear MachinegilbertoAinda não há avaliações
- Report Navigation Prashanth RamadossDocumento1 páginaReport Navigation Prashanth RamadossaustinvishalAinda não há avaliações
- 03a IGCSE Maths 4MB1 Paper 2R - January 2020 Examination PaperDocumento32 páginas03a IGCSE Maths 4MB1 Paper 2R - January 2020 Examination PaperMehwish ArifAinda não há avaliações
- Fundamental of Database: Madda Walabu University College of Computing Department of Information TechnologyDocumento46 páginasFundamental of Database: Madda Walabu University College of Computing Department of Information TechnologychalaAinda não há avaliações
- The Gist of NCERT General Science PDFDocumento148 páginasThe Gist of NCERT General Science PDFSatyajitSahooAinda não há avaliações
- What Is Radar and Its FunctionDocumento3 páginasWhat Is Radar and Its FunctionJean Maya DiscayaAinda não há avaliações
- Qualcomm Snapdragon 660 Mobile Platform Product BriefDocumento2 páginasQualcomm Snapdragon 660 Mobile Platform Product BriefTuxInfoAinda não há avaliações
- General Biology 1: Quarter 2 - Module 1 Energy TransformationDocumento41 páginasGeneral Biology 1: Quarter 2 - Module 1 Energy TransformationAyesh MontefalcoAinda não há avaliações
- POWER Nav1 - MIDTERM - Topic 1 & 2Documento31 páginasPOWER Nav1 - MIDTERM - Topic 1 & 2CLIJOHN PABLO FORD100% (1)