Você também pode gostar
- Ford Acronyms ListDocumento32 páginasFord Acronyms ListMudflap CalizayaAinda não há avaliações
- Spho VW Can Data Bus Int.Documento145 páginasSpho VW Can Data Bus Int.Niza JamilAinda não há avaliações
- Global Course Catalog 2018Documento161 páginasGlobal Course Catalog 2018Jhon Edison CastroAinda não há avaliações
- PC210-10M0 New Product Introduction Final Revision Neil PDFDocumento93 páginasPC210-10M0 New Product Introduction Final Revision Neil PDFtarmiji_nur100% (4)
- Crawler Crane Electrical System: SANY Heavy Industry Co., Ltd. Quality Changes The WorldDocumento67 páginasCrawler Crane Electrical System: SANY Heavy Industry Co., Ltd. Quality Changes The Worldminthu khit100% (1)
- Electrical TractionDocumento58 páginasElectrical TractionVijay Singh100% (1)
- 03.can-Bus and Sae-Bus j1939 - CatDocumento29 páginas03.can-Bus and Sae-Bus j1939 - CatEdison Pfoccori BarrionuevoAinda não há avaliações
- 11 ApuDocumento19 páginas11 Apurajendra singhAinda não há avaliações
- Data Transfer On CAN Data Bus II para ImprimirDocumento60 páginasData Transfer On CAN Data Bus II para ImprimirFernando Jordan Barreto100% (1)
- EBS 5 Product InfoDocumento4 páginasEBS 5 Product InfoVincent PriceAinda não há avaliações
- VCU Brochure EN 2014 FinalDocumento12 páginasVCU Brochure EN 2014 Final63445 Wongsagorn100% (1)
- CAN BusDocumento14 páginasCAN BusMoh.Iqbal Haryono Putra100% (1)
- AlfaOBD HelpDocumento37 páginasAlfaOBD HelpThiagoAinda não há avaliações
- MS For The CCTV Installation and TerminationDocumento28 páginasMS For The CCTV Installation and Terminationwaaji snapAinda não há avaliações
- CAN BUS and Data Exchange Incl. J-1939Documento29 páginasCAN BUS and Data Exchange Incl. J-1939Sandoval Ramos Eddy100% (2)
- Canbus TritonDocumento86 páginasCanbus TritonAndika SetiyawanAinda não há avaliações
- Design and Comparison of Cascaded H-Bridge, Modular Multilevel Converter and 5-L Active Neutral Point Clamped Topologies For Motor Drive ApplicationsDocumento10 páginasDesign and Comparison of Cascaded H-Bridge, Modular Multilevel Converter and 5-L Active Neutral Point Clamped Topologies For Motor Drive Applicationsyasin bayatAinda não há avaliações
- MT L495 L395 RevfDocumento72 páginasMT L495 L395 RevfMARCELO KENZO TAKETA100% (5)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsAinda não há avaliações
- Can. Connecting Man Can Bus (560726 v2)Documento19 páginasCan. Connecting Man Can Bus (560726 v2)Arnold Guti100% (1)
- Introduction To Flight Control SystemsDocumento34 páginasIntroduction To Flight Control SystemsshivaspyAinda não há avaliações
- Electro Hydraulic SuspensionDocumento5 páginasElectro Hydraulic SuspensionHemantha KumarAinda não há avaliações
- APC200 TransmissionDocumento2 páginasAPC200 TransmissionNuñez Jesus100% (2)
- Manual Service Clamp Cascade PDFDocumento230 páginasManual Service Clamp Cascade PDFXAV G2Ainda não há avaliações
- CAN Application Fields CAN Application FieldsDocumento21 páginasCAN Application Fields CAN Application FieldsThiago MelloAinda não há avaliações
- BPEP Compact P 1260 ENDocumento8 páginasBPEP Compact P 1260 ENliyuping200809Ainda não há avaliações
- Controller Area Network: CAN Is Low CostDocumento4 páginasController Area Network: CAN Is Low Costsharma5544Ainda não há avaliações
- Can BusDocumento14 páginasCan BusNguyễn VỹAinda não há avaliações
- Nuova Bravo 1.4 16V Instrument/Gauge Electrical Circuits 5505Documento18 páginasNuova Bravo 1.4 16V Instrument/Gauge Electrical Circuits 5505a123123123Ainda não há avaliações
- IC693APU302Documento3 páginasIC693APU302raulmoscoso3Ainda não há avaliações
- Ap0806010 - v1 0 - CanmotionDocumento18 páginasAp0806010 - v1 0 - CanmotionasASasASAinda não há avaliações
- Ebus Marketing Informations &smart City System IntroductionDocumento8 páginasEbus Marketing Informations &smart City System IntroductionG BozzoAinda não há avaliações
- CCB2 (E) Pneumatic - Feb 2020Documento56 páginasCCB2 (E) Pneumatic - Feb 2020Deepak KumarAinda não há avaliações
- 54C Controller Area Network (CAN)Documento11 páginas54C Controller Area Network (CAN)manhAinda não há avaliações
- Technical Information For Hyster Customer Care CentresDocumento36 páginasTechnical Information For Hyster Customer Care CentresmanuelsaenzAinda não há avaliações
- A Perfect FitDocumento6 páginasA Perfect Fitmostafagoly1358Ainda não há avaliações
- PAM CAN BusDocumento44 páginasPAM CAN BusNguyễn Tuấn VũAinda não há avaliações
- PRIUS (Body Electrical) - SpanishDocumento89 páginasPRIUS (Body Electrical) - SpanishDaniel AlejandroAinda não há avaliações
- Distributed Motion ControlDocumento6 páginasDistributed Motion ControlzoltanskaAinda não há avaliações
- Installion Electrical Interface Specification Marine Engines D9, D13, D16 EMSDocumento36 páginasInstallion Electrical Interface Specification Marine Engines D9, D13, D16 EMSGiangDo100% (1)
- Combined Brake and Steering Actuator For Automatic Vehicle ControlDocumento18 páginasCombined Brake and Steering Actuator For Automatic Vehicle ControlMizo QuizAinda não há avaliações
- CanBus WikipidiaDocumento23 páginasCanBus WikipidiaZaw Min NaingAinda não há avaliações
- Nautosteer Advanced Steering Control SystemDocumento8 páginasNautosteer Advanced Steering Control SystemHandoko AiAinda não há avaliações
- FORD Acronym ListDocumento37 páginasFORD Acronym Listmattraboin50% (2)
- Circuit Breaker LTB D With Motor Drive. Motor Drive. ABB PP - H - HV - Page 1. Ed 2006-04Documento29 páginasCircuit Breaker LTB D With Motor Drive. Motor Drive. ABB PP - H - HV - Page 1. Ed 2006-04Phạm Lê Quốc ChínhAinda não há avaliações
- FSHSDHDSFHSDFHSFDSFDocumento5 páginasFSHSDHDSFHSDFHSFDSFNiksa MarkovicAinda não há avaliações
- 6.11 Manoeuvring System: MAN B&W Diesel A/S S26MC Project GuideDocumento12 páginas6.11 Manoeuvring System: MAN B&W Diesel A/S S26MC Project GuideMuhammad Ihsan KamilAinda não há avaliações
- Tecnord - Application ExamplesDocumento24 páginasTecnord - Application ExamplesRıfat BingülAinda não há avaliações
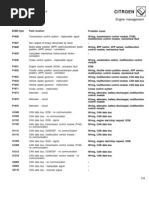
- CITROEN C2 FaultCodes 0309Documento1 páginaCITROEN C2 FaultCodes 0309Mário OliveiraAinda não há avaliações
- Electronic Braking Control ModuleDocumento10 páginasElectronic Braking Control ModuleHanumantha ContiAinda não há avaliações
- AlfaOBD Android HelpDocumento31 páginasAlfaOBD Android HelpMoaz BorayAinda não há avaliações
- Study On The Embedded CAN Bus Control System in The Vehicle PDFDocumento4 páginasStudy On The Embedded CAN Bus Control System in The Vehicle PDFsrcembeddedAinda não há avaliações
- Design and Implementation of The Adaptive Control System For Automotive Headlights Based On CAN/LIN NetworkDocumento5 páginasDesign and Implementation of The Adaptive Control System For Automotive Headlights Based On CAN/LIN NetworkAkshay PowarAinda não há avaliações
- Nissan Diagnostico de Iacv y AacvDocumento7 páginasNissan Diagnostico de Iacv y AacvJose Luis Velasquez RomeroAinda não há avaliações
- Isolation Product Solution For Motor DriveDocumento2 páginasIsolation Product Solution For Motor DriveIvana PrezimeAinda não há avaliações
- List of Abbreviations: Training Publication PMC-39-A0126-AF001-00Documento10 páginasList of Abbreviations: Training Publication PMC-39-A0126-AF001-00Alexander Goez100% (1)
- COMSOFT Air Traffic Equipment (ATE) : ADS-B Installation RequirementsDocumento25 páginasCOMSOFT Air Traffic Equipment (ATE) : ADS-B Installation RequirementsNguyen Xuan NhuAinda não há avaliações
- GR00001100 54C PDFDocumento8 páginasGR00001100 54C PDFferAinda não há avaliações
- абривиатура крайслерDocumento15 páginasабривиатура крайслерАндрей ПеченевскийAinda não há avaliações
- E3sconf Pgsge2021 01044Documento4 páginasE3sconf Pgsge2021 01044Luong Ngoc MinhAinda não há avaliações
- Bti TFT Aem v2 Gauge 1 0Documento20 páginasBti TFT Aem v2 Gauge 1 0xe tevAinda não há avaliações
- 2011 Park Sliding ModeDocumento6 páginas2011 Park Sliding ModeCumhur ÖzbaşAinda não há avaliações
- Concept, Construction and First Results of A Test Bench For Automotive Power NetsDocumento8 páginasConcept, Construction and First Results of A Test Bench For Automotive Power NetsmacorcheroAinda não há avaliações
- Radar Signal Detection Using TMS320C50Documento82 páginasRadar Signal Detection Using TMS320C50mgitecetechAinda não há avaliações
- Y 0720Documento260 páginasY 0720Oscar Gálvez IglesiasAinda não há avaliações
- What Is PantographDocumento6 páginasWhat Is PantographTriskaAinda não há avaliações
- Performance Curve KS2610.160 MT: 61-235-00-3440 3 117 13-10-2BB 03-11 60 HZ 1 220 V 2 - 2 35 8.4 3445 - 4Documento1 páginaPerformance Curve KS2610.160 MT: 61-235-00-3440 3 117 13-10-2BB 03-11 60 HZ 1 220 V 2 - 2 35 8.4 3445 - 4joseodelgado17Ainda não há avaliações
- Ansi C37.20.1 / Nema Ics 2-322Documento16 páginasAnsi C37.20.1 / Nema Ics 2-322juliancansenAinda não há avaliações
- STP100 110 60 IS XX 11Documento230 páginasSTP100 110 60 IS XX 11Monster LifeAinda não há avaliações
- S32K DSDocumento85 páginasS32K DSResham ParmarAinda não há avaliações
- BOQ FormatDocumento10 páginasBOQ FormatnewattelectricAinda não há avaliações
- RSE-Series 2 DatasheetDocumento2 páginasRSE-Series 2 Datasheetpanama sunpowerAinda não há avaliações
- Phantom Gateway2 DatasheetDocumento8 páginasPhantom Gateway2 DatasheetFernando VenegasAinda não há avaliações
- RM Series Line Reactors & RC Series DV/DT Filters: Section 3Documento20 páginasRM Series Line Reactors & RC Series DV/DT Filters: Section 3bakien-canAinda não há avaliações
- Electromechanical Energy Conversion PrinciplesDocumento5 páginasElectromechanical Energy Conversion PrinciplesVastie RozulAinda não há avaliações
- Phase Shift Keying (PSK) : July 2020Documento11 páginasPhase Shift Keying (PSK) : July 2020fares belAinda não há avaliações
- GD100-PV Energy Efficiency Certification ReportDocumento26 páginasGD100-PV Energy Efficiency Certification ReportWaleed MatarAinda não há avaliações
- Test and Diagnostics System For High Voltage Cables: HV DAC-300Documento2 páginasTest and Diagnostics System For High Voltage Cables: HV DAC-300Boris MirandaAinda não há avaliações
- OSY Lecture 2 Notes - MSBTE NEXT ICONDocumento11 páginasOSY Lecture 2 Notes - MSBTE NEXT ICONBarik PradeepAinda não há avaliações
- A Low-Noise Chopper Amplifier Designed For Multi-Channel Neural Signal AcquisitionDocumento11 páginasA Low-Noise Chopper Amplifier Designed For Multi-Channel Neural Signal AcquisitionRajeeAinda não há avaliações
- Curriculum Vitae - SUDHIR GUDURIDocumento8 páginasCurriculum Vitae - SUDHIR GUDURIsudhirguduruAinda não há avaliações
- Shuvajit Paul (Ec 304)Documento13 páginasShuvajit Paul (Ec 304)Candy CrUshAinda não há avaliações
- 023 PXG80-N CA1N9260en 01Documento10 páginas023 PXG80-N CA1N9260en 01SuperhypoAinda não há avaliações
- Cascode - Wikipedia, The Free EncyclopediaDocumento7 páginasCascode - Wikipedia, The Free EncyclopediaManvendra BhandariAinda não há avaliações
- Gsits01767 1-2295275Documento27 páginasGsits01767 1-2295275ManunoghiAinda não há avaliações
- Kertas Penerangan 1Documento19 páginasKertas Penerangan 1Amin IqmalAinda não há avaliações
- Worst Case Circuit AnalysisDocumento6 páginasWorst Case Circuit Analysisdev_iitgAinda não há avaliações
- Assignment 1Documento1 páginaAssignment 1zuron7Ainda não há avaliações
- CCD Calibrations and Noise Considerations - Karen KwitterDocumento19 páginasCCD Calibrations and Noise Considerations - Karen KwitterMechtatel HrenovAinda não há avaliações