Você também pode gostar
- ViscousFlow Note01Documento18 páginasViscousFlow Note01Adebanjo TomisinAinda não há avaliações
- Copula (Probability Theory)Documento9 páginasCopula (Probability Theory)user2127Ainda não há avaliações
- Kalman Filter Explained - MOST SIMPLISTICALLYDocumento100 páginasKalman Filter Explained - MOST SIMPLISTICALLYuser2127Ainda não há avaliações
- Sakui, K., & Cowie, N. (2012) - The Dark Side of Motivation - Teachers' Perspectives On 'Unmotivation'. ELTJ, 66 (2), 205-213.Documento9 páginasSakui, K., & Cowie, N. (2012) - The Dark Side of Motivation - Teachers' Perspectives On 'Unmotivation'. ELTJ, 66 (2), 205-213.Robert HutchinsonAinda não há avaliações
- AP Physics NotesDocumento18 páginasAP Physics Notesfhsphysics100% (1)
- Catify To Satisfy - Simple Solutions For Creating A Cat-Friendly Home (PDFDrive)Documento315 páginasCatify To Satisfy - Simple Solutions For Creating A Cat-Friendly Home (PDFDrive)Paz Libros100% (2)
- Nonlinear ProgrammingDocumento5 páginasNonlinear Programminguser2127Ainda não há avaliações
- 2022 Mable Parker Mclean Scholarship ApplicationDocumento2 páginas2022 Mable Parker Mclean Scholarship Applicationapi-444959661Ainda não há avaliações
- Westfleet Buyers Guide 2019-11-17Documento43 páginasWestfleet Buyers Guide 2019-11-17kbrinaldiAinda não há avaliações
- Computer Vision for Microscopy Image AnalysisNo EverandComputer Vision for Microscopy Image AnalysisMei ChenAinda não há avaliações
- XRD TheoryDocumento7 páginasXRD TheoryAdarta MuhAinda não há avaliações
- How Is AI Changing The World We Live inDocumento4 páginasHow Is AI Changing The World We Live inSyeda AlishaAinda não há avaliações
- PMP Assesment TestDocumento17 páginasPMP Assesment Testwilliam collinsAinda não há avaliações
- 6844 Gig Economy and The Future of Work A Fiverr Com Case StudyDocumento9 páginas6844 Gig Economy and The Future of Work A Fiverr Com Case Studyuser2127Ainda não há avaliações
- Gas Kinetic TheoryDocumento311 páginasGas Kinetic Theoryrestlaim100% (1)
- Dermatology Skin in Systemic DiseaseDocumento47 páginasDermatology Skin in Systemic DiseaseNariska CooperAinda não há avaliações
- Synthesis, Analysis and Simulation of A Four-Bar Mechanism Using Matlab ProgrammingDocumento12 páginasSynthesis, Analysis and Simulation of A Four-Bar Mechanism Using Matlab ProgrammingPedroAugustoAinda não há avaliações
- Phytotherapy On CancerDocumento21 páginasPhytotherapy On CancerSiddhendu Bhattacharjee100% (1)
- Risk Estimation On High Frequency Financial DataDocumento78 páginasRisk Estimation On High Frequency Financial DataXiaoyue ChenAinda não há avaliações
- Rom 2 - 0-11 (En)Documento132 páginasRom 2 - 0-11 (En)Mara HerreraAinda não há avaliações
- RheologyShortCourse Lecture10 PDFDocumento67 páginasRheologyShortCourse Lecture10 PDFMehdi EzadiAinda não há avaliações
- Scale-Up Problems Arising With Non-Newtonian Fluids PDFDocumento14 páginasScale-Up Problems Arising With Non-Newtonian Fluids PDFTestAinda não há avaliações
- Review of Membrane Contactors Aplicaciones Industria PDFDocumento8 páginasReview of Membrane Contactors Aplicaciones Industria PDFDaniela SolarteAinda não há avaliações
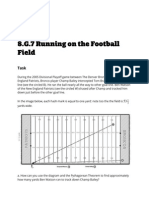
- Calculus in Football 1Documento4 páginasCalculus in Football 1api-5459504270% (1)
- A. I. Leonov, A. N. Prokunin (Auth.) - Nonlinear Phenomena in Flows of Viscoelastic Polymer Fluids-Springer Netherlands (1994) - 1 PDFDocumento491 páginasA. I. Leonov, A. N. Prokunin (Auth.) - Nonlinear Phenomena in Flows of Viscoelastic Polymer Fluids-Springer Netherlands (1994) - 1 PDFEdgar SharapovaAinda não há avaliações
- Application of Magnetorheological Fluid in HydroformingDocumento20 páginasApplication of Magnetorheological Fluid in HydroformingShailesh PatelAinda não há avaliações
- Emulsions and FoamsDocumento24 páginasEmulsions and FoamsMaria Natalia TambunanAinda não há avaliações
- Ben Watson Pythagorean Activity TeacherDocumento5 páginasBen Watson Pythagorean Activity Teacherapi-300146479Ainda não há avaliações
- Assignment 1 - Engineering Calculus 1 PDFDocumento1 páginaAssignment 1 - Engineering Calculus 1 PDFMarc RiveraAinda não há avaliações
- Calc Final ReviewDocumento6 páginasCalc Final ReviewkaytaychunAinda não há avaliações
- Calculus For AP PhysicsDocumento31 páginasCalculus For AP PhysicsdeepaksiddAinda não há avaliações
- Module 2 PrecipitationDocumento84 páginasModule 2 PrecipitationcliffAinda não há avaliações
- Euler Equation Fluid Dynamics PDFDocumento2 páginasEuler Equation Fluid Dynamics PDFDianaAinda não há avaliações
- Blood Rhe Ology and Hemo DynamicsDocumento16 páginasBlood Rhe Ology and Hemo Dynamicsandrei_mititeluAinda não há avaliações
- Rheology of Colloidal Suspensions para PresentaciónDocumento29 páginasRheology of Colloidal Suspensions para PresentaciónEliana CárdenasAinda não há avaliações
- 267 FA10 ChainRuleDocumento1 página267 FA10 ChainRuleRemo MengoniAinda não há avaliações
- RheologyDocumento38 páginasRheologyKhairul Azman100% (1)
- Bernard P. Binks, Tommy S. Horozov Colloidal Particles at Liquid Interfaces PDFDocumento519 páginasBernard P. Binks, Tommy S. Horozov Colloidal Particles at Liquid Interfaces PDFTanvir Hossain100% (1)
- DBMS-B+ and B TreesDocumento9 páginasDBMS-B+ and B TreesMageshwari Dharaneeswaran0% (1)
- Python BasicsDocumento2 páginasPython BasicsNeelam KapoorAinda não há avaliações
- Big Data Analytics Implementation in Banking Industry Case Study Cross Selling Activity in Indonesias Commercial BankDocumento12 páginasBig Data Analytics Implementation in Banking Industry Case Study Cross Selling Activity in Indonesias Commercial BankAli RakhmanAinda não há avaliações
- Careers: Exploring The PossibilitiesDocumento98 páginasCareers: Exploring The Possibilitiesnmnwse100% (4)
- Assignment - Mendoza, Jillea RDocumento4 páginasAssignment - Mendoza, Jillea Rjillea mendozaAinda não há avaliações
- Analytics and Big DataDocumento38 páginasAnalytics and Big DataSreeprada V100% (1)
- Physics Project XIDocumento10 páginasPhysics Project XIanishkadiyalaAinda não há avaliações
- Organic Photochemistry: Prof. Dr. Burkhard König, Institut Für Organische Chemie, Universität RegensburgDocumento38 páginasOrganic Photochemistry: Prof. Dr. Burkhard König, Institut Für Organische Chemie, Universität RegensburglsueyinAinda não há avaliações
- A Monte Carlo Comparison Between The Free Cash Flow and Discounted Cash Flow ApproachesDocumento17 páginasA Monte Carlo Comparison Between The Free Cash Flow and Discounted Cash Flow ApproachesShito RyuAinda não há avaliações
- Differential Equations - Solved Assignments - Semester Fall 2004Documento37 páginasDifferential Equations - Solved Assignments - Semester Fall 2004Muhammad UmairAinda não há avaliações
- Previous Final ExamDocumento10 páginasPrevious Final ExamRyan LearnAinda não há avaliações
- Week7 (Wed Mar 03-Single Particle in Fluid (Students Notes)Documento21 páginasWeek7 (Wed Mar 03-Single Particle in Fluid (Students Notes)Julie Anne CristalesAinda não há avaliações
- Steepest DescentDocumento68 páginasSteepest DescentzekromAinda não há avaliações
- Monaghan J. J. and Gingold R. A. (1983)Documento16 páginasMonaghan J. J. and Gingold R. A. (1983)Carlos Alberto Dutra Fraga FilhoAinda não há avaliações
- 2D Lid Diven Cavity Final Report PDFDocumento24 páginas2D Lid Diven Cavity Final Report PDFVivek JoshiAinda não há avaliações
- Slides Chapter 1 Mathematical PreliminariesDocumento19 páginasSlides Chapter 1 Mathematical Preliminarieskkhemmo100% (2)
- Mini Project (Report) (Aditya Gunin)Documento20 páginasMini Project (Report) (Aditya Gunin)Soham SahaAinda não há avaliações
- Neural Network For SSCV HydrodynamicsDocumento104 páginasNeural Network For SSCV Hydrodynamicsvane-16Ainda não há avaliações
- Big Data in Financial ServicesDocumento20 páginasBig Data in Financial ServicesPALLAVI KAMBLEAinda não há avaliações
- Cauchy Momentum EquationDocumento9 páginasCauchy Momentum EquationArt RmbdAinda não há avaliações
- Curve FittingDocumento4 páginasCurve FittingIlham Indrapraja IskandarAinda não há avaliações
- PCDISPDocumento28 páginasPCDISPlatecAinda não há avaliações
- Castle - A Theory of Normal MoveoutDocumento17 páginasCastle - A Theory of Normal MoveoutNeil BariiAinda não há avaliações
- Class 12 Revision Notes Application of DerivativesDocumento7 páginasClass 12 Revision Notes Application of DerivativesSupragya RaiAinda não há avaliações
- Estimating Moveout ParametersDocumento4 páginasEstimating Moveout Parametersmahtab rashidifardAinda não há avaliações
- Researching Alzheimer's Medicines - Setbacks and Stepping StonesDocumento20 páginasResearching Alzheimer's Medicines - Setbacks and Stepping StonesOscar EspinozaAinda não há avaliações
- Reologia en Flotacion PDFDocumento7 páginasReologia en Flotacion PDFMonica Ulloa LamasAinda não há avaliações
- Wang2004 A New Algorithm For Solving Classical Blasius Equation Lei WangDocumento9 páginasWang2004 A New Algorithm For Solving Classical Blasius Equation Lei WangSaeb AmirAhmadi ChomacharAinda não há avaliações
- Basic Seismology-Shearer (USGS)Documento61 páginasBasic Seismology-Shearer (USGS)jcpchin2Ainda não há avaliações
- Elastic Strain Fields and Dislocation MobilityNo EverandElastic Strain Fields and Dislocation MobilityAinda não há avaliações
- Different Types of Curve FittingDocumento13 páginasDifferent Types of Curve FittingmubashirAinda não há avaliações
- Curve FittingDocumento6 páginasCurve Fittingharrison9Ainda não há avaliações
- Curve Fitting - WikipediaDocumento6 páginasCurve Fitting - WikipediaVenu GopalAinda não há avaliações
- Numerical IntegrationDocumento8 páginasNumerical Integration丨ㄒ丂ᐯ乇ᗪ卂几ㄒAinda não há avaliações
- How Blockchain Can Make Crowdfunding More Secure - Pledgecamp - MediumDocumento3 páginasHow Blockchain Can Make Crowdfunding More Secure - Pledgecamp - Mediumuser2127Ainda não há avaliações
- H78uithe Future of Global Ip - Unlock The True Potential of Your Ip PortfolioDocumento15 páginasH78uithe Future of Global Ip - Unlock The True Potential of Your Ip Portfoliouser2127Ainda não há avaliações
- Lysosome - Hydrolysis: of The CellDocumento1 páginaLysosome - Hydrolysis: of The Celluser2127Ainda não há avaliações
- Asset Securitization - How Remote Is Bankruptcy RemoteDocumento25 páginasAsset Securitization - How Remote Is Bankruptcy Remoteuser2127Ainda não há avaliações
- Global Base Metals Review: November, 2005Documento3 páginasGlobal Base Metals Review: November, 2005user2127Ainda não há avaliações
- MITOCW - MITRES - 6-007s11lec26 - 300k.mp4: ProfessorDocumento12 páginasMITOCW - MITRES - 6-007s11lec26 - 300k.mp4: Professoruser2127Ainda não há avaliações
- Felix Apache OrgDocumento2 páginasFelix Apache Orguser2127Ainda não há avaliações
- 02 When All Digital TV ArrivesDocumento9 páginas02 When All Digital TV Arrivesuser2127Ainda não há avaliações
- Space (Mathematics)Documento9 páginasSpace (Mathematics)user2127Ainda não há avaliações
- OECD Communications Outlook 2011: Summary in EnglishDocumento5 páginasOECD Communications Outlook 2011: Summary in Englishuser2127Ainda não há avaliações
- Resume: Mr. Shubham Mohan Deokar E-MailDocumento2 páginasResume: Mr. Shubham Mohan Deokar E-MailAdv Ranjit Shedge PatilAinda não há avaliações
- WAQF Podium Design Presentation 16 April 2018Documento23 páginasWAQF Podium Design Presentation 16 April 2018hoodqy99Ainda não há avaliações
- Nadee 3Documento1 páginaNadee 3api-595436597Ainda não há avaliações
- Escaner Electromagnético de Faja Transportadora-Steel SPECTDocumento85 páginasEscaner Electromagnético de Faja Transportadora-Steel SPECTEdwin Alfredo Eche QuirozAinda não há avaliações
- Fire Protection in BuildingsDocumento2 páginasFire Protection in BuildingsJames Carl AriesAinda não há avaliações
- Student Exploration: Inclined Plane - Simple MachineDocumento9 páginasStudent Exploration: Inclined Plane - Simple MachineLuka MkrtichyanAinda não há avaliações
- How To Block HTTP DDoS Attack With Cisco ASA FirewallDocumento4 páginasHow To Block HTTP DDoS Attack With Cisco ASA Firewallabdel taibAinda não há avaliações
- ML Ass 2Documento6 páginasML Ass 2Santhosh Kumar PAinda não há avaliações
- Shakespeare Sonnet EssayDocumento3 páginasShakespeare Sonnet Essayapi-5058594660% (1)
- An Evaluation of MGNREGA in SikkimDocumento7 páginasAn Evaluation of MGNREGA in SikkimBittu SubbaAinda não há avaliações
- Wner'S Anual: Led TVDocumento32 páginasWner'S Anual: Led TVErmand WindAinda não há avaliações
- Week-3-Q1-Gen Chem-Sep-11-15-DllDocumento12 páginasWeek-3-Q1-Gen Chem-Sep-11-15-DllJennette BelliotAinda não há avaliações
- Antena TelnetDocumento4 páginasAntena TelnetMarco PiambaAinda não há avaliações
- C2 - Conveyors Diagram: Peso de Faja Longitud de CargaDocumento1 páginaC2 - Conveyors Diagram: Peso de Faja Longitud de CargaIvan CruzAinda não há avaliações
- SweetenersDocumento23 páginasSweetenersNur AfifahAinda não há avaliações
- ELEVATOR DOOR - pdf1Documento10 páginasELEVATOR DOOR - pdf1vigneshAinda não há avaliações
- Ra 9272Documento6 páginasRa 9272janesamariamAinda não há avaliações
- 40 People vs. Rafanan, Jr.Documento10 páginas40 People vs. Rafanan, Jr.Simeon TutaanAinda não há avaliações
- Micro Lab Midterm Study GuideDocumento15 páginasMicro Lab Midterm Study GuideYvette Salomé NievesAinda não há avaliações
- Application Form InnofundDocumento13 páginasApplication Form InnofundharavinthanAinda não há avaliações
- The Influence of Irish Monks On Merovingian Diocesan Organization-Robbins BittermannDocumento15 páginasThe Influence of Irish Monks On Merovingian Diocesan Organization-Robbins BittermanngeorgiescuAinda não há avaliações
- Man As God Created Him, ThemDocumento3 páginasMan As God Created Him, ThemBOEN YATORAinda não há avaliações