Você também pode gostar
- El Nacimiento de La Arqueologia Moderna 1798 1945 Eve Gran Aymerich PDFDocumento716 páginasEl Nacimiento de La Arqueologia Moderna 1798 1945 Eve Gran Aymerich PDFKobalt von Kriegerischberg100% (3)
- Prueba Historia 4 Básico GeografíaDocumento3 páginasPrueba Historia 4 Básico Geografíajorge vera100% (5)
- 1874-Analisis Del Juego de Ajedrez-A C VazquezDocumento371 páginas1874-Analisis Del Juego de Ajedrez-A C VazquezKobalt von KriegerischbergAinda não há avaliações
- Pirenne Jacques-Historia Del Antiguo Egipto-Tomo I PDFDocumento482 páginasPirenne Jacques-Historia Del Antiguo Egipto-Tomo I PDFAndres GonzalezAinda não há avaliações
- 3458 5378 1 PBDocumento21 páginas3458 5378 1 PBKobalt von KriegerischbergAinda não há avaliações
- Tratamiento Digital Imagenes PDFDocumento12 páginasTratamiento Digital Imagenes PDFKobalt von KriegerischbergAinda não há avaliações
- UIB08-TT02-Principios de La Topografia Clasica PDFDocumento10 páginasUIB08-TT02-Principios de La Topografia Clasica PDFKobalt von KriegerischbergAinda não há avaliações
- Clasificador Por Objeto Del Gasto 2006Documento101 páginasClasificador Por Objeto Del Gasto 2006Kobalt von KriegerischbergAinda não há avaliações
- Kopp Juan Jose - Nicolas Descalzi, Reconocimiento Del Rio Negro, Patagonia Argentina - Expedicion Al Sur Juan Manuel de Rosas Año de 1833Documento62 páginasKopp Juan Jose - Nicolas Descalzi, Reconocimiento Del Rio Negro, Patagonia Argentina - Expedicion Al Sur Juan Manuel de Rosas Año de 1833jocejuAinda não há avaliações
- Cartilla de Estabilidad - Ejemplo PDFDocumento140 páginasCartilla de Estabilidad - Ejemplo PDFBrian Yarzagaray PradaAinda não há avaliações
- BJX 14Documento13 páginasBJX 14CYNTHIAAinda não há avaliações
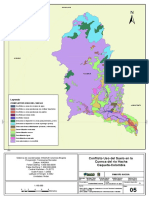
- Mapa Conflicto Uso Del SueloDocumento1 páginaMapa Conflicto Uso Del SueloDANIELA FLOREZ BALLESTEROSAinda não há avaliações
- Coordenadas UTM GPSDocumento11 páginasCoordenadas UTM GPSmakio89Ainda não há avaliações
- Estudio TopográficoDocumento13 páginasEstudio TopográficoWilder PatricioAinda não há avaliações
- Ejercicios de TopografiaDocumento8 páginasEjercicios de TopografiaDaniel Alex Fernandez Aleman100% (1)
- Nueva Geopolitica de Colombia Gen Julio LondoñoDocumento184 páginasNueva Geopolitica de Colombia Gen Julio LondoñoFelipe A Torrealba100% (4)
- Taller StellariumDocumento3 páginasTaller Stellariumsantiago ramirez restrepoAinda não há avaliações
- Data para PSD54 A WG84Documento22 páginasData para PSD54 A WG84Lesther Keresky Zarate ChungaAinda não há avaliações
- Prueba de Geogrfia 4 Basico 444444444Documento11 páginasPrueba de Geogrfia 4 Basico 444444444Mercedes Fredes MuñozAinda não há avaliações
- Prueba La Era de Los Descubrimientos Geograficos Propuesta 1 34944 20160122 20151207 112603Documento12 páginasPrueba La Era de Los Descubrimientos Geograficos Propuesta 1 34944 20160122 20151207 112603Nicole MuñozAinda não há avaliações
- Practica de Topografia 2Documento6 páginasPractica de Topografia 2Paulo Roberto Ariza MolinaAinda não há avaliações
- Orientación Espacial 3º BásicosDocumento76 páginasOrientación Espacial 3º BásicosjeannetteAinda não há avaliações
- Azimut DirectoDocumento3 páginasAzimut DirectoBrigitte SantofimioAinda não há avaliações
- Práctica de ClasesDocumento6 páginasPráctica de ClasesImer Guerrero rojasAinda não há avaliações
- Prueba de Sociedad 2 Abril PlanosDocumento4 páginasPrueba de Sociedad 2 Abril PlanosAnonymous 5Gq8cWNAinda não há avaliações
- Evaluación Sumativa N°1 Paralelos y MeridianosDocumento2 páginasEvaluación Sumativa N°1 Paralelos y MeridianosRosario PeñaAinda não há avaliações
- PLANO FV No 12 ZONAS DE DESARROLLO DE CONSTRUCCIÓN PRIORITARIO O VISDocumento1 páginaPLANO FV No 12 ZONAS DE DESARROLLO DE CONSTRUCCIÓN PRIORITARIO O VISRaul ViafaraAinda não há avaliações
- Informe Topografico Las JaguasDocumento20 páginasInforme Topografico Las JaguasELDanvi7 ZAMBRANOAinda não há avaliações
- Diferencias Insignificantes Entre RNAV 1Documento6 páginasDiferencias Insignificantes Entre RNAV 1Migue RaxAinda não há avaliações
- Mapa Suelos Taxonomia CotopaxiDocumento1 páginaMapa Suelos Taxonomia CotopaxiVillacrés AlexisAinda não há avaliações
- 020-Ordenes Al Timon y MaquinasDocumento3 páginas020-Ordenes Al Timon y MaquinasZuñiga Andres ChrisAinda não há avaliações
- RIPPA en Español PDFDocumento56 páginasRIPPA en Español PDFbucanerosurAinda não há avaliações
- Sesion #4Documento25 páginasSesion #4Alfonso Marino Mescua CaleroAinda não há avaliações
- Practica 04 - Grupo 06-TopografiaDocumento20 páginasPractica 04 - Grupo 06-TopografiaKENYI EFRAIN ROMERO PEREZAinda não há avaliações
- Las Mejoras Nunca Se Detienen: Todas Las Constelaciones y Más CanalesDocumento2 páginasLas Mejoras Nunca Se Detienen: Todas Las Constelaciones y Más CanalesCarlosMiguelAinda não há avaliações
- TECLAS Y FUNCIONES Eatacion Total TopconDocumento99 páginasTECLAS Y FUNCIONES Eatacion Total TopconGina Paola QuintanaAinda não há avaliações
- Calculos Nave Industrial - Marilin Vargas PostigoDocumento9 páginasCalculos Nave Industrial - Marilin Vargas PostigoAlex Alfredo Bautista CalizayaAinda não há avaliações