Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- A/L Chemistry 1980-2000 AnswersDocumento59 páginasA/L Chemistry 1980-2000 AnswersDhanushka Bandara79% (108)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- M Schemes 33Documento3 páginasM Schemes 33Dhanushka Bandara33% (6)
- Load ForecastingDocumento8 páginasLoad ForecastingDhanushka BandaraAinda não há avaliações
- IESL NotesDocumento12 páginasIESL NotesDhanushka BandaraAinda não há avaliações
- SLAS - Anusha GokulaDocumento72 páginasSLAS - Anusha GokulaDhanushka Bandara100% (2)
- 12 Satipattana Bhawana PDFDocumento136 páginas12 Satipattana Bhawana PDFDhanushka BandaraAinda não há avaliações
- Functions PDFDocumento263 páginasFunctions PDFDhanushka BandaraAinda não há avaliações
- NGN Centre ServiceDocumento6 páginasNGN Centre ServiceDhanushka BandaraAinda não há avaliações
- 1980-2000 A/L Chemistry PapersDocumento123 páginas1980-2000 A/L Chemistry PapersDhanushka Bandara83% (18)
- Mechanics Hydro StatisticsDocumento328 páginasMechanics Hydro StatisticsDhanushka BandaraAinda não há avaliações
- Hydrostatics: Dhanushka Bandara - 0775811667Documento17 páginasHydrostatics: Dhanushka Bandara - 0775811667Dhanushka Bandara0% (1)
- Engineering MathematicsDocumento7 páginasEngineering MathematicsDhanushka BandaraAinda não há avaliações
- Neural Networks - Basics Matlab PDFDocumento59 páginasNeural Networks - Basics Matlab PDFWesley DoorsamyAinda não há avaliações
- WindingDocumento12 páginasWindingDhanushka BandaraAinda não há avaliações
- Liebert Gxt3 UPS 230V 700VA-3000VA-For Brazil: User ManualDocumento44 páginasLiebert Gxt3 UPS 230V 700VA-3000VA-For Brazil: User ManualRicardo RochaAinda não há avaliações
- STD 12 Physics 2 Board Question Paper Maharashtra BoardDocumento6 páginasSTD 12 Physics 2 Board Question Paper Maharashtra BoardTashvi Kulkarni100% (1)
- EntryHeatTreatmentEHT Maillefer 2017-08-13Documento2 páginasEntryHeatTreatmentEHT Maillefer 2017-08-13Bahador EslamdoostAinda não há avaliações
- Using Copper Tape To Fabricate RF Breadboard Circuits: Service Information From Hewlett-PackardDocumento8 páginasUsing Copper Tape To Fabricate RF Breadboard Circuits: Service Information From Hewlett-PackardrobidjoAinda não há avaliações
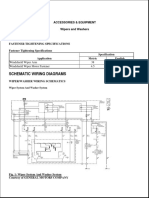
- 149 - Wipers and WashersDocumento84 páginas149 - Wipers and WashersGedas GvildysAinda não há avaliações
- Gravity Geophysical MethodDocumento3 páginasGravity Geophysical MethodFebrianto Jeremy AllakAinda não há avaliações
- 3 1 5 Ohms LawDocumento3 páginas3 1 5 Ohms Lawapi-2755555760% (1)
- Z4-8MK3 Manual en v1.2Documento32 páginasZ4-8MK3 Manual en v1.2NharperAinda não há avaliações
- 08 Ta BWGF 000a B6eDocumento3 páginas08 Ta BWGF 000a B6eAmador AguilaAinda não há avaliações
- Instrument InstallationDocumento4 páginasInstrument InstallationadelmnrAinda não há avaliações
- T7S 1250 PR231/P LS/I in 1250A 3p F FDocumento3 páginasT7S 1250 PR231/P LS/I in 1250A 3p F FAldair PeraltaAinda não há avaliações
- Pump Inverter PB11KH-G2-DataSheet PDFDocumento1 páginaPump Inverter PB11KH-G2-DataSheet PDFleonel alexis reyes arancibiaAinda não há avaliações
- Balun QEX Chris - Trask PDFDocumento13 páginasBalun QEX Chris - Trask PDFNestor Alberto EscalaAinda não há avaliações
- On Load Tap Changer Type ADocumento16 páginasOn Load Tap Changer Type AculwavesAinda não há avaliações
- Orbis Sav-Wire Base Installation Guide: GeneralDocumento2 páginasOrbis Sav-Wire Base Installation Guide: GeneralAnonymous YWmB9HDgAinda não há avaliações
- Hitachi-HRL SeriesDocumento13 páginasHitachi-HRL SeriesJose LopezAinda não há avaliações
- PCB Designing Fundamentals: Compiled By: Hiren Patel (ET Dept.)Documento42 páginasPCB Designing Fundamentals: Compiled By: Hiren Patel (ET Dept.)Chintaan PatelAinda não há avaliações
- Lab E1: Introduction To Circuits: Digital Multimeter (DMM)Documento6 páginasLab E1: Introduction To Circuits: Digital Multimeter (DMM)keethanAinda não há avaliações
- Lecture Impedance and Admittance On Smith ChartsDocumento15 páginasLecture Impedance and Admittance On Smith ChartsBill WhiteAinda não há avaliações
- Impedance Measurement Handbook: 1st EditionDocumento36 páginasImpedance Measurement Handbook: 1st EditionAlex IslasAinda não há avaliações
- Ring Oscillator - Wikipedia, The Free EncyclopediaDocumento3 páginasRing Oscillator - Wikipedia, The Free EncyclopediaSunil M. PaiAinda não há avaliações
- 01457264Documento26 páginas01457264ナス サンAinda não há avaliações
- Current A LevelDocumento9 páginasCurrent A Levelnazran68Ainda não há avaliações
- UntitledDocumento6 páginasUntitled龙栊Ainda não há avaliações
- JBL PRX 612MDocumento2 páginasJBL PRX 612MDiago SofranoAinda não há avaliações
- Microwave DesignDocumento20 páginasMicrowave DesignJoel Mateo100% (1)
- Led TV: Service ManualDocumento68 páginasLed TV: Service ManualZigma FAinda não há avaliações
- Akhwat Yar MirzaDocumento1 páginaAkhwat Yar MirzaAnonymous BZQOJwWIh6Ainda não há avaliações
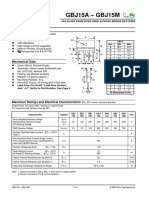
- GBJ15M Diode Cau Chinh Luu PDFDocumento4 páginasGBJ15M Diode Cau Chinh Luu PDFHưng HQAinda não há avaliações