Você também pode gostar
- Molland-Insel Regression Method For CatamaransDocumento15 páginasMolland-Insel Regression Method For CatamaransTihomir MarkovicAinda não há avaliações
- Sea Keeping Analysis For Preliminary DesignDocumento10 páginasSea Keeping Analysis For Preliminary DesignTullio OpattiAinda não há avaliações
- Y&B Design - The Disgn of BoatsDocumento66 páginasY&B Design - The Disgn of BoatsEuclides Cagnini100% (1)
- Analytical Calculation of Uncoupled Heave and Roll, A Parametric Study of A Barge PDFDocumento75 páginasAnalytical Calculation of Uncoupled Heave and Roll, A Parametric Study of A Barge PDFTor Edvard Søfteland90% (10)
- Effect of Criteria On Seakeeping Performance AssessmentDocumento13 páginasEffect of Criteria On Seakeeping Performance Assessmentjarbas.otoniAinda não há avaliações
- Fin Area EffectDocumento8 páginasFin Area EffectyildirimelifAinda não há avaliações
- Planing in Extreme Conditions - Blount, Funkhouser 2009Documento14 páginasPlaning in Extreme Conditions - Blount, Funkhouser 2009haujesAinda não há avaliações
- Hiper04 Paper ADocumento13 páginasHiper04 Paper AaspoisdAinda não há avaliações
- Dynamic Stability of Ships in WavesDocumento9 páginasDynamic Stability of Ships in WavesJUNIOR JAVIER OLIVO FARRERAAinda não há avaliações
- Tidal Current Turbine Fatigue Loading Sensitivity To Waves and TurbulenceDocumento10 páginasTidal Current Turbine Fatigue Loading Sensitivity To Waves and TurbulenceHamish LaingAinda não há avaliações
- (Catamaran) Effect of Hull Form and Its Associated Parameters On The Resistance of A Catamaran - MaxsurfDocumento11 páginas(Catamaran) Effect of Hull Form and Its Associated Parameters On The Resistance of A Catamaran - MaxsurfWm Erick Cr100% (1)
- Ship Dynamic Intact Stability Focus On Parametric Roll: Technical ReportDocumento44 páginasShip Dynamic Intact Stability Focus On Parametric Roll: Technical Reporteacikel78Ainda não há avaliações
- Amecrc PDFDocumento17 páginasAmecrc PDFshimul2008Ainda não há avaliações
- The Hydrodynamics Performance of Aquaculture Fishing Vessel in Variation of Deadrise Angle and SponsonDocumento10 páginasThe Hydrodynamics Performance of Aquaculture Fishing Vessel in Variation of Deadrise Angle and SponsonTJPRC PublicationsAinda não há avaliações
- A Study of Shock Impacts and Vibration Dose Values Onboard High-Speed Marine CraftDocumento14 páginasA Study of Shock Impacts and Vibration Dose Values Onboard High-Speed Marine CraftBodea GeorgeAinda não há avaliações
- Good Related PaperDocumento8 páginasGood Related PaperMariano MarcosAinda não há avaliações
- Ship Resistance Calculation For A Fishing VesselDocumento73 páginasShip Resistance Calculation For A Fishing VesselMahdi100% (5)
- Analysis of Propulsion Performance of KVLCC2 in Waves: July 2015Documento11 páginasAnalysis of Propulsion Performance of KVLCC2 in Waves: July 2015Abhishek AroraAinda não há avaliações
- Seakeeping RAODocumento5 páginasSeakeeping RAOEgwuatu UchennaAinda não há avaliações
- c06 Calm BuoyDocumento4 páginasc06 Calm BuoyputhenkulamAinda não há avaliações
- Simulation of Ship Motion in Seaway: and Mogens BlankeDocumento13 páginasSimulation of Ship Motion in Seaway: and Mogens BlankeEgwuatu UchennaAinda não há avaliações
- Na ThesisDocumento36 páginasNa Thesisrohith bhogadiAinda não há avaliações
- Mooring Design & Mooring Analysis IndiaDocumento17 páginasMooring Design & Mooring Analysis IndiaMermaid coAinda não há avaliações
- A Model of Low Grazing Angle Sea Clutter For Coherent Radar Performance AnalysysDocumento45 páginasA Model of Low Grazing Angle Sea Clutter For Coherent Radar Performance AnalysysPavel Schukin100% (1)
- Re-Evaluation of DNV Simplified Formulae For Crane Tip MotionsDocumento10 páginasRe-Evaluation of DNV Simplified Formulae For Crane Tip Motionsguxiaom100% (1)
- Mean Load EffectsDocumento12 páginasMean Load EffectsPier FrancescoAinda não há avaliações
- Executive Summary:: International Maritime OrganizationDocumento6 páginasExecutive Summary:: International Maritime OrganizationdarrelsilvaAinda não há avaliações
- Gatin2020 1Documento11 páginasGatin2020 1Carlos Eduardo Simoes de AlmeidaAinda não há avaliações
- Rationally-Based Fatigue Design of Tankers (Owen Hughes and Paul FranklinDocumento17 páginasRationally-Based Fatigue Design of Tankers (Owen Hughes and Paul FranklinKelvin XuAinda não há avaliações
- DP PrinciplesDocumento19 páginasDP PrinciplesCiutacu Andrei100% (1)
- Mek4450 Marine Operations ExercisesDocumento13 páginasMek4450 Marine Operations ExercisesdsrfgAinda não há avaliações
- HR0L 35 LO 3 S3 (Sea Wave Bending and Loading Programme Assumptions) - 1626312815Documento7 páginasHR0L 35 LO 3 S3 (Sea Wave Bending and Loading Programme Assumptions) - 1626312815noczviviAinda não há avaliações
- Dallinga Kanerva Ferry SeakeepingDocumento24 páginasDallinga Kanerva Ferry Seakeepingy_596688032Ainda não há avaliações
- Effects of Coating Roughness and Biofouling On Ship Resistance and PoweringDocumento12 páginasEffects of Coating Roughness and Biofouling On Ship Resistance and PoweringSarath Babu SAinda não há avaliações
- Garme2012 - Resistance and PoweringDocumento63 páginasGarme2012 - Resistance and PoweringSrikanth ShivramAinda não há avaliações
- Fender Selection For STS Ops YokohamaDocumento0 páginaFender Selection For STS Ops YokohamabranikAinda não há avaliações
- 127ShipScience Report PDFDocumento48 páginas127ShipScience Report PDFTullio OpattiAinda não há avaliações
- ITTC - Recommended Procedures and GuidelinesDocumento18 páginasITTC - Recommended Procedures and GuidelinesMariano MarcosAinda não há avaliações
- Thruster EffectivityDocumento190 páginasThruster Effectivityronny-su100% (2)
- Computer Simulation of Moored Ship Motion Induced by Harbor Resonance in Pohang New HarborDocumento12 páginasComputer Simulation of Moored Ship Motion Induced by Harbor Resonance in Pohang New HarborrezbahalAinda não há avaliações
- Motion Analysis Offer Superb Support On BoardDocumento25 páginasMotion Analysis Offer Superb Support On BoardJorge Del RioAinda não há avaliações
- U.S. Navy Salvor'S Handbook: S0300-A7-HBK-010 0910-Lp-046-7750 Revision 1Documento272 páginasU.S. Navy Salvor'S Handbook: S0300-A7-HBK-010 0910-Lp-046-7750 Revision 1Kevin_Kirchman_8072Ainda não há avaliações
- Resistance of Double-Chine Large Gigh-Speed Craft: June 1999Documento13 páginasResistance of Double-Chine Large Gigh-Speed Craft: June 1999haujesAinda não há avaliações
- c06 Calm BuoyDocumento4 páginasc06 Calm BuoyHASHMI MAHMOODAinda não há avaliações
- 01 Resonance-Free SWATHDocumento10 páginas01 Resonance-Free SWATHIvan NilsenAinda não há avaliações
- Hull Design Considerations For Improved Stability of Fishing Vessels in WavesDocumento14 páginasHull Design Considerations For Improved Stability of Fishing Vessels in WavesEd UrquizaAinda não há avaliações
- 1 s2.0 S2092678216303909 MainDocumento9 páginas1 s2.0 S2092678216303909 Mainlangit kitaAinda não há avaliações
- Seakeeping TestingDocumento6 páginasSeakeeping TestinggksahaAinda não há avaliações
- Ada 587307Documento53 páginasAda 587307abhilash.bkAinda não há avaliações
- 4 - Hydrostatic Particulars (Stability Book)Documento22 páginas4 - Hydrostatic Particulars (Stability Book)Enrique Arroyo100% (1)
- Referat Whipping DSPNDocumento7 páginasReferat Whipping DSPNernur ablachimAinda não há avaliações
- Spectral Analysis of The Underwater Acou PDFDocumento6 páginasSpectral Analysis of The Underwater Acou PDFrodrigosilva1973Ainda não há avaliações
- Planing Hull 1-MasterDocumento17 páginasPlaning Hull 1-MastercockybundooAinda não há avaliações
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsAinda não há avaliações
- Lithospheric DiscontinuitiesNo EverandLithospheric DiscontinuitiesHuaiyu YuanAinda não há avaliações
- Navigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsNo EverandNavigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsAinda não há avaliações
- Enhanced Oil Recovery: Resonance Macro- and Micro-Mechanics of Petroleum ReservoirsNo EverandEnhanced Oil Recovery: Resonance Macro- and Micro-Mechanics of Petroleum ReservoirsNota: 5 de 5 estrelas5/5 (1)
- U12 Hydr1Documento24 páginasU12 Hydr1Jake BrohawnAinda não há avaliações
- U13 Hydr2Documento28 páginasU13 Hydr2Jake BrohawnAinda não há avaliações
- U11 Elect-3Documento22 páginasU11 Elect-3Jake BrohawnAinda não há avaliações
- Eating, Entilation & Ir Onditioning : H V A C HvacDocumento16 páginasEating, Entilation & Ir Onditioning : H V A C HvacJake BrohawnAinda não há avaliações
- ELECTRICITY II: Generation & DistributionDocumento16 páginasELECTRICITY II: Generation & DistributionJake BrohawnAinda não há avaliações
- ELECTRICITY I: IntroductionDocumento33 páginasELECTRICITY I: IntroductionJake BrohawnAinda não há avaliações
- U7 ReefersDocumento28 páginasU7 ReefersJake BrohawnAinda não há avaliações
- Piping: Pipe & Pipe Fittings Tubing & Tube FittingsDocumento19 páginasPiping: Pipe & Pipe Fittings Tubing & Tube FittingsJake BrohawnAinda não há avaliações
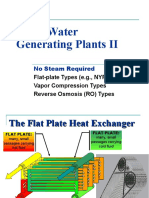
- Fresh Water Generating Plants II: No Steam RequiredDocumento13 páginasFresh Water Generating Plants II: No Steam RequiredJake BrohawnAinda não há avaliações
- Pumping Operations: Starting Procedures Securing Procedures Sytem OperationDocumento16 páginasPumping Operations: Starting Procedures Securing Procedures Sytem OperationJake BrohawnAinda não há avaliações
- Pumps: Pumping Basics Centrifugal Pumps Positive Displacement PumpsDocumento22 páginasPumps: Pumping Basics Centrifugal Pumps Positive Displacement PumpsJake BrohawnAinda não há avaliações
- Fresh Water Generating Plants I: Distillation HP and LP Evaporators Submerged Tube Types Flash EvaporatorsDocumento12 páginasFresh Water Generating Plants I: Distillation HP and LP Evaporators Submerged Tube Types Flash EvaporatorsJake BrohawnAinda não há avaliações
- Valves: Valve Types & ApplicationsDocumento26 páginasValves: Valve Types & ApplicationsJake BrohawnAinda não há avaliações
- Intro To Ship Systems: Engr 540Documento6 páginasIntro To Ship Systems: Engr 540Jake BrohawnAinda não há avaliações
- Intro To Ship Systems: Engr 540Documento7 páginasIntro To Ship Systems: Engr 540Jake BrohawnAinda não há avaliações
- Notes U8-HVACDocumento6 páginasNotes U8-HVACJake BrohawnAinda não há avaliações
- JKJKJDocumento3 páginasJKJKJjosecarlosvjAinda não há avaliações
- Goliath 90 v129 eDocumento129 páginasGoliath 90 v129 eerkanAinda não há avaliações
- 3 Tasks and ANS - Gamma Maths PDFDocumento6 páginas3 Tasks and ANS - Gamma Maths PDFNora ZhangAinda não há avaliações
- SDHI18 - Komparativna Analiza Primene Vodostana I Sinhronih Regulatora TurbinaDocumento13 páginasSDHI18 - Komparativna Analiza Primene Vodostana I Sinhronih Regulatora TurbinaAleksandar PetkovicAinda não há avaliações
- Better - Homes.and - Gardens.usa - TruePDF December.2018Documento136 páginasBetter - Homes.and - Gardens.usa - TruePDF December.2018MadaMadutsaAinda não há avaliações
- Data Bulletin Group Motor Installations:: Understanding National Electrical Code (NEC) 430.53 RequirementsDocumento8 páginasData Bulletin Group Motor Installations:: Understanding National Electrical Code (NEC) 430.53 RequirementsshoaibAinda não há avaliações
- Awakened Citizen Programme-Report-class VII-2014Documento4 páginasAwakened Citizen Programme-Report-class VII-2014bhsgeneral r m saraswathi50% (4)
- MarbiehistoryDocumento6 páginasMarbiehistoryMarbie DalanginAinda não há avaliações
- Tesla Coil ProjectDocumento8 páginasTesla Coil ProjectShivam singhAinda não há avaliações
- GP1 Q1 Week-1Documento18 páginasGP1 Q1 Week-1kickyknacksAinda não há avaliações
- WPBSA Official Rules of The Games of Snooker and Billiards 2020 PDFDocumento88 páginasWPBSA Official Rules of The Games of Snooker and Billiards 2020 PDFbabuzducAinda não há avaliações
- Flow Chart - QCDocumento2 páginasFlow Chart - QCKarthikeyan Shanmugavel100% (1)
- Cargo ManagementDocumento45 páginasCargo ManagementShubham Chaurasia75% (8)
- AssessmentDocumento3 páginasAssessmentpalflaxAinda não há avaliações
- Chapter 7 - Muscular SystemDocumento29 páginasChapter 7 - Muscular SystemlAinda não há avaliações
- Bảng giá FLUKEDocumento18 páginasBảng giá FLUKEVăn Long NguyênAinda não há avaliações
- Purpose in LifeDocumento1 páginaPurpose in Lifeaashish95100% (1)
- Case Studies of Transportation Public-Private Partnerships Around The WorldDocumento158 páginasCase Studies of Transportation Public-Private Partnerships Around The WorldzhenhuaruiAinda não há avaliações
- Innerwear Industry Pitch PresentationDocumento19 páginasInnerwear Industry Pitch PresentationRupeshKumarAinda não há avaliações
- Gemh 108Documento20 páginasGemh 108YuvrajAinda não há avaliações
- Managing Diabetic Foot Ulcers ReadingDocumento21 páginasManaging Diabetic Foot Ulcers Readinghimanshugupta811997Ainda não há avaliações
- Solutions GoldsteinDocumento10 páginasSolutions GoldsteinAnyiAinda não há avaliações
- Cambridge IGCSE Paper 2Documento4 páginasCambridge IGCSE Paper 2irajooo epik zizterAinda não há avaliações
- Immigrant Italian Stone CarversDocumento56 páginasImmigrant Italian Stone Carversglis7100% (2)
- GROSS Mystery of UFOs A PreludeDocumento309 páginasGROSS Mystery of UFOs A PreludeTommaso MonteleoneAinda não há avaliações
- Course Syllabus: Course Code Course Title ECTS CreditsDocumento3 páginasCourse Syllabus: Course Code Course Title ECTS CreditsHanaa HamadallahAinda não há avaliações
- World's Standard Model G6A!: Low Signal RelayDocumento9 páginasWorld's Standard Model G6A!: Low Signal RelayEgiAinda não há avaliações
- Bhil Tribal Mobilisation in AlirajpurDocumento14 páginasBhil Tribal Mobilisation in Alirajpurrahul banerjeeAinda não há avaliações
- Presentation - Delight Bulb PDFDocumento22 páginasPresentation - Delight Bulb PDFShiva KishoreAinda não há avaliações
- 12 Key Principles On Bhava AnalysisDocumento28 páginas12 Key Principles On Bhava AnalysisDhineshAinda não há avaliações