Você também pode gostar
- Basic Labview Examples PDFDocumento16 páginasBasic Labview Examples PDFbuiphuochuy55Ainda não há avaliações
- Basics of LabViewDocumento30 páginasBasics of LabViewnomimanAinda não há avaliações
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsNo EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsAinda não há avaliações
- Bluetooth TutorialDocumento349 páginasBluetooth Tutorialjohn bougsAinda não há avaliações
- Software Defined Radio: The Software Communications ArchitectureNo EverandSoftware Defined Radio: The Software Communications ArchitectureAinda não há avaliações
- Eecs100 Eecs43 Lab7-StrainGaugeDocumento5 páginasEecs100 Eecs43 Lab7-StrainGaugegilmeanualexmihai100% (1)
- Experiment No: 02 Introduction To Labview: Aim: To Study Various Functions, Tools and Libraries of Labview (LV) SoftwareDocumento9 páginasExperiment No: 02 Introduction To Labview: Aim: To Study Various Functions, Tools and Libraries of Labview (LV) SoftwareVaibhav BacchavAinda não há avaliações
- Labview Daq Hands On ExercisesDocumento40 páginasLabview Daq Hands On ExercisesTony GilesAinda não há avaliações
- PidDocumento10 páginasPidElvis YuAinda não há avaliações
- Labview File 5th SemDocumento20 páginasLabview File 5th Semvik9292Ainda não há avaliações
- Labview ReportDocumento16 páginasLabview ReportMd. Shah Kamal SaimumAinda não há avaliações
- A Quick Tutorial On LabVIEW Data AcquisitionDocumento12 páginasA Quick Tutorial On LabVIEW Data Acquisitionmino3089389Ainda não há avaliações
- 5 Design and Implementation of Test of Audiometric Based On MicrocontrollerDocumento12 páginas5 Design and Implementation of Test of Audiometric Based On MicrocontrollerجعفرالشموسيAinda não há avaliações
- Simulink Interfacing With Arduino (Manual)Documento20 páginasSimulink Interfacing With Arduino (Manual)Divyesh HarwaniAinda não há avaliações
- LabVIEW Spectral TutorialDocumento14 páginasLabVIEW Spectral TutorialMihaela EnacheAinda não há avaliações
- Chapter 6 First Order Transient PDFDocumento21 páginasChapter 6 First Order Transient PDFRindra RahmatullohAinda não há avaliações
- C Pointer TricksDocumento7 páginasC Pointer TricksSK_shivam100% (1)
- AVR10008 - FreeRTOSDocumento22 páginasAVR10008 - FreeRTOSAriana Ribeiro LameirinhasAinda não há avaliações
- An Introduction To Simulation Using SIMSCRIPT II.5Documento164 páginasAn Introduction To Simulation Using SIMSCRIPT II.5Michalis Michail100% (1)
- Introduction To Embedded Systems: Using Microcontrollers and The MSP430Documento34 páginasIntroduction To Embedded Systems: Using Microcontrollers and The MSP430Đắc Hùng Phú NguyễnAinda não há avaliações
- Do It Yourself 201 01Documento9 páginasDo It Yourself 201 01Diego Javier MorenoAinda não há avaliações
- Flowcode Introductory Course PDFDocumento12 páginasFlowcode Introductory Course PDFmawunyoAinda não há avaliações
- Simulation in LabVIEWDocumento14 páginasSimulation in LabVIEWjoukendAinda não há avaliações
- LabView PracticeDocumento21 páginasLabView PracticeVarunSunilAinda não há avaliações
- Student Workbook Instructor VersionDocumento341 páginasStudent Workbook Instructor VersionSeth Adams100% (1)
- PLC Programming Techniques - Part 2Documento27 páginasPLC Programming Techniques - Part 2Rafael Riesgo100% (1)
- Build Your Own C InterpreterDocumento18 páginasBuild Your Own C InterpreterRichard FergusonAinda não há avaliações
- Lec17 FSM PDFDocumento27 páginasLec17 FSM PDFNithin KumarAinda não há avaliações
- LabVIEW Vol2Documento146 páginasLabVIEW Vol2Alberto EsquivelAinda não há avaliações
- Labview Electronics Experiment DAQDocumento44 páginasLabview Electronics Experiment DAQChip Huynh100% (1)
- Eagle TutorialDocumento17 páginasEagle TutorialpraneetwinsAinda não há avaliações
- Arduino and LabVIEW.Documento11 páginasArduino and LabVIEW.Deyson RodriguesAinda não há avaliações
- LabVIEW TutorialsDocumento6 páginasLabVIEW TutorialsChris MmataAinda não há avaliações
- Computer Simulation TechniquesDocumento185 páginasComputer Simulation TechniquesNguyen Thi Hai VanAinda não há avaliações
- LabView Thermocouple TutorialDocumento2 páginasLabView Thermocouple TutorialMaureen LaFayetteAinda não há avaliações
- Debounce PDFDocumento11 páginasDebounce PDFEmanuel CrespoAinda não há avaliações
- Tutorial LabviewDocumento35 páginasTutorial LabviewSiddharth SinhaAinda não há avaliações
- LabVIEW Lab ManualDocumento20 páginasLabVIEW Lab ManualBhawani Singh0% (1)
- Group Assignment (Beng 1113)Documento15 páginasGroup Assignment (Beng 1113)Faris AzminAinda não há avaliações
- Step Response of RC Circuits 1. Objectives: BEE 233 Laboratory-2Documento7 páginasStep Response of RC Circuits 1. Objectives: BEE 233 Laboratory-2Marib SirajAinda não há avaliações
- Matlab Basics Tutorial: VectorsDocumento52 páginasMatlab Basics Tutorial: VectorsMohit Bathla MontyAinda não há avaliações
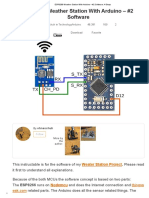
- ESP8266 Weather StationDocumento14 páginasESP8266 Weather StationVELAKITOAinda não há avaliações
- ARM Parallel IODocumento34 páginasARM Parallel IOAaaa AaaaAinda não há avaliações
- Lab 12 Introduction To Simulink ObjectiveDocumento16 páginasLab 12 Introduction To Simulink Objectivesaran gulAinda não há avaliações
- LabVIEW TutorialDocumento12 páginasLabVIEW TutorialBalakrishna VallavanAinda não há avaliações
- Multisim Templates For Custom Arduino Shields - National InstrumentsDocumento3 páginasMultisim Templates For Custom Arduino Shields - National Instrumentsefasaravanan0% (1)
- Control Systems Theory: Matlab & Simulink STB 35103Documento23 páginasControl Systems Theory: Matlab & Simulink STB 35103Akula Veerraju0% (1)
- Numerical Integration2 PDFDocumento44 páginasNumerical Integration2 PDFAnanda DasguptaAinda não há avaliações
- PLC 2Documento31 páginasPLC 2Biniam HaddisAinda não há avaliações
- JavaFX BasicsDocumento48 páginasJavaFX BasicsAffan Mirza100% (1)
- Digital Logic NotesDocumento32 páginasDigital Logic Notesjadad50% (2)
- PIC Microcontroller MikroC Tutorials PDFDocumento10 páginasPIC Microcontroller MikroC Tutorials PDFdevchandar100% (1)
- Advanced Debugging of STM32-Based DevicesDocumento10 páginasAdvanced Debugging of STM32-Based DevicesSandoval DanielAinda não há avaliações
- Maxima Book Chapter 8Documento38 páginasMaxima Book Chapter 8prakush_prakushAinda não há avaliações
- AluDocumento10 páginasAluAbhishek PatraAinda não há avaliações
- Simulink Basics Tutorial PDFDocumento44 páginasSimulink Basics Tutorial PDFVinod WankarAinda não há avaliações
- Working Capital ManagementDocumento39 páginasWorking Capital ManagementRebelliousRascalAinda não há avaliações
- Sophia Program For Sustainable FuturesDocumento128 páginasSophia Program For Sustainable FuturesfraspaAinda não há avaliações
- Sample Opposition To Motion To Strike Portions of Complaint in United States District CourtDocumento2 páginasSample Opposition To Motion To Strike Portions of Complaint in United States District CourtStan Burman100% (1)
- Subqueries-and-JOINs-ExercisesDocumento7 páginasSubqueries-and-JOINs-ExerciseserlanAinda não há avaliações
- Recommended Practices For Developing An Industrial Control Systems Cybersecurity Incident Response CapabilityDocumento49 páginasRecommended Practices For Developing An Industrial Control Systems Cybersecurity Incident Response CapabilityJohn DavisonAinda não há avaliações
- Accomplishment ReportDocumento1 páginaAccomplishment ReportMaria MiguelAinda não há avaliações
- Gabby Resume1Documento3 páginasGabby Resume1Kidradj GeronAinda não há avaliações
- Innovations in Land AdministrationDocumento66 páginasInnovations in Land AdministrationSanjawe KbAinda não há avaliações
- Epidemiologi DialipidemiaDocumento5 páginasEpidemiologi DialipidemianurfitrizuhurhurAinda não há avaliações
- Marine Lifting and Lashing HandbookDocumento96 páginasMarine Lifting and Lashing HandbookAmrit Raja100% (1)
- Continue: Rudolf Bultmann Theology of The New Testament PDFDocumento3 páginasContinue: Rudolf Bultmann Theology of The New Testament PDFpishoi gerges0% (1)
- Labstan 1Documento2 páginasLabstan 1Samuel WalshAinda não há avaliações
- PeopleSoft Application Engine Program PDFDocumento17 páginasPeopleSoft Application Engine Program PDFSaurabh MehtaAinda não há avaliações
- Introduction To Motor DrivesDocumento24 páginasIntroduction To Motor Drivessukhbat sodnomdorjAinda não há avaliações
- Sourcing Decisions in A Supply Chain: Powerpoint Presentation To Accompany Powerpoint Presentation To AccompanyDocumento58 páginasSourcing Decisions in A Supply Chain: Powerpoint Presentation To Accompany Powerpoint Presentation To AccompanyAlaa Al HarbiAinda não há avaliações
- CIR Vs PAL - ConstructionDocumento8 páginasCIR Vs PAL - ConstructionEvan NervezaAinda não há avaliações
- MMC Pipe Inspection RobotDocumento2 páginasMMC Pipe Inspection RobotSharad Agrawal0% (1)
- Building New Boxes WorkbookDocumento8 páginasBuilding New Boxes Workbookakhileshkm786Ainda não há avaliações
- Tradingview ShortcutsDocumento2 páginasTradingview Shortcutsrprasannaa2002Ainda não há avaliações
- Check Fraud Running Rampant in 2023 Insights ArticleDocumento4 páginasCheck Fraud Running Rampant in 2023 Insights ArticleJames Brown bitchAinda não há avaliações
- Review of Related LiteratureDocumento4 páginasReview of Related LiteratureCarlo Mikhail Santiago25% (4)
- L1 L2 Highway and Railroad EngineeringDocumento7 páginasL1 L2 Highway and Railroad Engineeringeutikol69Ainda não há avaliações
- Saet Work AnsDocumento5 páginasSaet Work AnsSeanLejeeBajan89% (27)
- 21st Bomber Command Tactical Mission Report 178, OcrDocumento49 páginas21st Bomber Command Tactical Mission Report 178, OcrJapanAirRaidsAinda não há avaliações
- How Yaffs WorksDocumento25 páginasHow Yaffs WorkseemkutayAinda não há avaliações
- Channel Tables1Documento17 páginasChannel Tables1erajayagrawalAinda não há avaliações
- IdM11gR2 Sizing WP LatestDocumento31 páginasIdM11gR2 Sizing WP Latesttranhieu5959Ainda não há avaliações
- 5 Deming Principles That Help Healthcare Process ImprovementDocumento8 páginas5 Deming Principles That Help Healthcare Process Improvementdewi estariAinda não há avaliações
- Applied-Entrepreneurship PPTDocumento65 páginasApplied-Entrepreneurship PPTJanice EscañoAinda não há avaliações
- 30 Creative Activities For KidsDocumento4 páginas30 Creative Activities For KidsLaloGomezAinda não há avaliações
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceNo EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceNota: 4 de 5 estrelas4/5 (51)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseNo EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseNota: 3.5 de 5 estrelas3.5/5 (69)
- Summary and Interpretation of Reality TransurfingNo EverandSummary and Interpretation of Reality TransurfingNota: 5 de 5 estrelas5/5 (5)
- A Brief History of Time: From the Big Bang to Black HolesNo EverandA Brief History of Time: From the Big Bang to Black HolesNota: 4 de 5 estrelas4/5 (2193)
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldNo EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldNota: 4.5 de 5 estrelas4.5/5 (54)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterNo EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterNota: 4.5 de 5 estrelas4.5/5 (410)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldNo EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldNota: 3.5 de 5 estrelas3.5/5 (64)
- Lost in Math: How Beauty Leads Physics AstrayNo EverandLost in Math: How Beauty Leads Physics AstrayNota: 4.5 de 5 estrelas4.5/5 (125)
- Quantum Physics: What Everyone Needs to KnowNo EverandQuantum Physics: What Everyone Needs to KnowNota: 4.5 de 5 estrelas4.5/5 (49)
- Mastering Logical Fallacies: The Definitive Guide to Flawless Rhetoric and Bulletproof LogicNo EverandMastering Logical Fallacies: The Definitive Guide to Flawless Rhetoric and Bulletproof LogicNota: 4 de 5 estrelas4/5 (91)
- Bedeviled: A Shadow History of Demons in ScienceNo EverandBedeviled: A Shadow History of Demons in ScienceNota: 5 de 5 estrelas5/5 (5)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessNo EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessNota: 4 de 5 estrelas4/5 (6)
- The End of Everything: (Astrophysically Speaking)No EverandThe End of Everything: (Astrophysically Speaking)Nota: 4.5 de 5 estrelas4.5/5 (157)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeNo EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeAinda não há avaliações
- The Beginning of Infinity: Explanations That Transform the WorldNo EverandThe Beginning of Infinity: Explanations That Transform the WorldNota: 5 de 5 estrelas5/5 (60)
- Packing for Mars: The Curious Science of Life in the VoidNo EverandPacking for Mars: The Curious Science of Life in the VoidNota: 4 de 5 estrelas4/5 (1396)
- Let There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessNo EverandLet There Be Light: Physics, Philosophy & the Dimensional Structure of ConsciousnessNota: 4.5 de 5 estrelas4.5/5 (57)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeNo EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeNota: 4.5 de 5 estrelas4.5/5 (3)
- Infinite Powers: How Calculus Reveals the Secrets of the UniverseNo EverandInfinite Powers: How Calculus Reveals the Secrets of the UniverseNota: 4.5 de 5 estrelas4.5/5 (126)
- A Natural History of Color: The Science Behind What We See and How We See itNo EverandA Natural History of Color: The Science Behind What We See and How We See itNota: 4 de 5 estrelas4/5 (13)
- What If?: Serious Scientific Answers to Absurd Hypothetical QuestionsNo EverandWhat If?: Serious Scientific Answers to Absurd Hypothetical QuestionsNota: 5 de 5 estrelas5/5 (5)
- AP Physics 1 Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeNo EverandAP Physics 1 Premium, 2024: 4 Practice Tests + Comprehensive Review + Online PracticeAinda não há avaliações
- Vibration and Frequency: How to Get What You Want in LifeNo EverandVibration and Frequency: How to Get What You Want in LifeNota: 4.5 de 5 estrelas4.5/5 (13)