Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Transistor Configuration PDFDocumento42 páginasTransistor Configuration PDFfozle rahad100% (2)
- Ghana Building Code - Part 9.2Documento101 páginasGhana Building Code - Part 9.2vasvuk50% (4)
- ADA MP-1 Noise-ModDocumento19 páginasADA MP-1 Noise-ModAndrei Popa100% (1)
- Pirelli CablesDocumento128 páginasPirelli Cablesdetroit44Ainda não há avaliações
- Siemens Perfect Harmony Drive Commissioning ManualDocumento3 páginasSiemens Perfect Harmony Drive Commissioning ManualIGHORODJEAinda não há avaliações
- Quasi Z SourceDocumento9 páginasQuasi Z SourceMark-George RuthaAinda não há avaliações
- Fischer Technical Services Safety ManualDocumento15 páginasFischer Technical Services Safety ManualHenry FlorendoAinda não há avaliações
- Pg061 - RG Tunnel CoaxDocumento1 páginaPg061 - RG Tunnel CoaxDolyAinda não há avaliações
- Core Reasons of LED Light Being Most Progressive Product in Lighting SectorDocumento11 páginasCore Reasons of LED Light Being Most Progressive Product in Lighting SectorseumAinda não há avaliações
- Delay Calculations: Introduction To Cmos Vlsi DesignDocumento27 páginasDelay Calculations: Introduction To Cmos Vlsi DesignbiboAinda não há avaliações
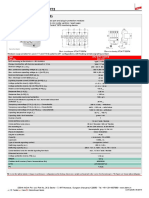
- Product Data Sheet: SPD VT2 VT2 M TT 320 FM (955 325)Documento1 páginaProduct Data Sheet: SPD VT2 VT2 M TT 320 FM (955 325)Vikaas JainAinda não há avaliações
- Scroll SolenoidDocumento11 páginasScroll SolenoidRauf AlirzayevAinda não há avaliações
- TIL112Documento2 páginasTIL112Candido GraciaAinda não há avaliações
- KSTAR PV Inverters CatalogueDocumento29 páginasKSTAR PV Inverters CatalogueBernardoAinda não há avaliações
- Instruction Manual: Boe-Therm@boe-Therm - DKDocumento23 páginasInstruction Manual: Boe-Therm@boe-Therm - DKTuphacAinda não há avaliações
- Lecture 1 Introduction To Digital CommunicationsDocumento65 páginasLecture 1 Introduction To Digital Communicationscastroverdejoselito25Ainda não há avaliações
- 1670 Brochure GCS - 28 May 2014Documento2 páginas1670 Brochure GCS - 28 May 2014Christian Darlach VeramendiAinda não há avaliações
- A36 Annunciator Light DiagramDocumento3 páginasA36 Annunciator Light Diagramh26mmhng7qAinda não há avaliações
- FSX027WFDocumento4 páginasFSX027WFdavidkhoiAinda não há avaliações
- S 4000 Manual PDFDocumento55 páginasS 4000 Manual PDFMaría Flores ToledoAinda não há avaliações
- Viva QuestionsDocumento5 páginasViva QuestionsKalyan RanjanAinda não há avaliações
- D.C. Switchgear Range Type MBSDocumento8 páginasD.C. Switchgear Range Type MBSDoomAinda não há avaliações
- Dtpbman GEDocumento76 páginasDtpbman GEnabil160874Ainda não há avaliações
- Pressed PDFDocumento22 páginasPressed PDFSayan MukherjeeAinda não há avaliações
- VCB ProMec E 1110 PDFDocumento88 páginasVCB ProMec E 1110 PDFNguyễn Mạnh TuấnAinda não há avaliações
- Automatic Street LightDocumento17 páginasAutomatic Street LightRohit LamkhadeAinda não há avaliações
- APB Manual e PDFDocumento105 páginasAPB Manual e PDFMiladinm1Ainda não há avaliações
- 6472 - Sidekick Plus PDFDocumento2 páginas6472 - Sidekick Plus PDFNoor CanoAinda não há avaliações
- Transformer, Control Schneider 9070TF500D1Documento1 páginaTransformer, Control Schneider 9070TF500D1SerAinda não há avaliações
- Electric Field G12Documento33 páginasElectric Field G12Abiekhay Camillee Unson LavastidaAinda não há avaliações