Você também pode gostar
- RetenedorDocumento22 páginasRetenedorTitiAinda não há avaliações
- Ensayo de Control 1 (Control Digital)Documento5 páginasEnsayo de Control 1 (Control Digital)Paul GuillenAinda não há avaliações
- Laboratorio 2 Control DigitalDocumento5 páginasLaboratorio 2 Control DigitalCM35Ainda não há avaliações
- Lab4 Control2Documento12 páginasLab4 Control2Romer BaltazarAinda não há avaliações
- Laboratorio 2 Elt2692!1!2021Documento5 páginasLaboratorio 2 Elt2692!1!2021tvdigital tvdAinda não há avaliações
- Exámenes AutomáticaDocumento199 páginasExámenes AutomáticareturboAinda não há avaliações
- Practica5 BodeDocumento15 páginasPractica5 BodeAlonso Núñez100% (9)
- S06.s1 - Sistemas de Control DigitalDocumento53 páginasS06.s1 - Sistemas de Control DigitalJonas Huamani PumaAinda não há avaliações
- Diseño de CompensadoresDocumento10 páginasDiseño de CompensadoresIsaac MartinezAinda não há avaliações
- Lab 7 Sistemas de ControlDocumento3 páginasLab 7 Sistemas de ControlfranklinAinda não há avaliações
- Laboratorio EltDocumento3 páginasLaboratorio EltayrtmoranAinda não há avaliações
- Laboratorio N°1 - Trabajo GrupalDocumento22 páginasLaboratorio N°1 - Trabajo GrupalOSCAR VINICIO CHUQUITARCO LAGLAAinda não há avaliações
- Unidad II - Bode y NyquistDocumento12 páginasUnidad II - Bode y NyquistHenry GarciaAinda não há avaliações
- Práctica 10 MatlabDocumento8 páginasPráctica 10 MatlabPedro RiveraAinda não há avaliações
- Errores en Estado Estacionario Usando Matla1Documento10 páginasErrores en Estado Estacionario Usando Matla1Rodo CidAinda não há avaliações
- Diagrama de BodeDocumento5 páginasDiagrama de Bodefranklin9427Ainda não há avaliações
- Modelo Matemático Del Control de Profundidad de Un SubmarinoDocumento11 páginasModelo Matemático Del Control de Profundidad de Un SubmarinoGustavo PaizAinda não há avaliações
- Lab 4 - 1o y 2do Orden Control PIDDocumento12 páginasLab 4 - 1o y 2do Orden Control PIDCarlos Andres RojasAinda não há avaliações
- Laboratorio 4 Elt2692-1-2021Documento4 páginasLaboratorio 4 Elt2692-1-2021Miguel Angel Fernández EquizaAinda não há avaliações
- 05-Análisis Con RLTOOLDocumento2 páginas05-Análisis Con RLTOOLpablo rodriguezAinda não há avaliações
- Teorema de BodeDocumento13 páginasTeorema de BodeRomel Patiño100% (1)
- Laboratorio Nº1: Respuesta en Frecuencia de Sistemas LinealesDocumento17 páginasLaboratorio Nº1: Respuesta en Frecuencia de Sistemas LinealesLuis Angel Quispe MachacaAinda não há avaliações
- Desarrollo de 5 DinamicaDocumento26 páginasDesarrollo de 5 DinamicaRosalinda Barrios de la cruzAinda não há avaliações
- Sistemas de Control Aplicados (Clase 26)Documento18 páginasSistemas de Control Aplicados (Clase 26)Martin AguilarAinda não há avaliações
- Grupo 2 - Semana 10Documento51 páginasGrupo 2 - Semana 10Godo SánchezAinda não há avaliações
- LaboratorioDocumento19 páginasLaboratoriofredy javier vilca zamataAinda não há avaliações
- Análisis y Simulación de Sistema Discreto Con MatlabDocumento10 páginasAnálisis y Simulación de Sistema Discreto Con MatlabKevin MaldonadoAinda não há avaliações
- Laboratorio 4 - Diagramas de BodeDocumento10 páginasLaboratorio 4 - Diagramas de Bodemaria_carbajal_390% (1)
- Cap9 CompensacionDocumento43 páginasCap9 CompensacionCelula CarlosAinda não há avaliações
- Control Automatico Compensadores Adelanto y AtrasoDocumento57 páginasControl Automatico Compensadores Adelanto y AtrasoAnonymous 7rbDr3bI50% (2)
- Compensadores en MathlabDocumento11 páginasCompensadores en MathlabOmar Trejo PortugalAinda não há avaliações
- Equivalentes DiscretosDocumento25 páginasEquivalentes DiscretosIsmael BonillaAinda não há avaliações
- Laboratorio 02Documento31 páginasLaboratorio 02Pool Nolasco Ramirez0% (1)
- Análisis y Simulación en La Frecuencia de Sistemas Lineales Invariantes en El TiempoDocumento4 páginasAnálisis y Simulación en La Frecuencia de Sistemas Lineales Invariantes en El TiempoLuilli Angel EsquincaAinda não há avaliações
- Hoja de Problemas #5MDocumento10 páginasHoja de Problemas #5MJohn CarmonaAinda não há avaliações
- 9 Diseño Compensacion Sistemas Control RealimentacionDocumento43 páginas9 Diseño Compensacion Sistemas Control RealimentacionestefaAinda não há avaliações
- Hoja de Problemas #5Documento10 páginasHoja de Problemas #5Derecho IcaAinda não há avaliações
- Rltool PDFDocumento12 páginasRltool PDFjejeAinda não há avaliações
- Control Imc FinalDocumento17 páginasControl Imc FinalMindy MunozAinda não há avaliações
- Lab2 TC2Documento9 páginasLab2 TC2jorgeAinda não há avaliações
- 03-Lab 3-GuideDocumento13 páginas03-Lab 3-GuideJosue MarshallAinda não há avaliações
- Complemento Practica 5Documento17 páginasComplemento Practica 5Lucario Peeling100% (1)
- DC Motor Ø 24 1.16.011Documento11 páginasDC Motor Ø 24 1.16.011Carlos PerezAinda não há avaliações
- Redes de CompensaciónDocumento5 páginasRedes de CompensaciónJhony SiguenzaAinda não há avaliações
- Regulación Preguntas ResueltasDocumento17 páginasRegulación Preguntas ResueltasAntonio MolaAinda não há avaliações
- Análisis y Simulación de Sistema Discreto Con MatlabDocumento10 páginasAnálisis y Simulación de Sistema Discreto Con MatlabRoger ChaupiAinda não há avaliações
- Controladores DigitalesDocumento10 páginasControladores DigitalesPako AlbAinda não há avaliações
- Control Digital Con MatlabDocumento10 páginasControl Digital Con Matlabdavid9_zld4754Ainda não há avaliações
- Lab 2Documento45 páginasLab 2Lenny RayssaAinda não há avaliações
- Cont I - Cap. IIIDocumento87 páginasCont I - Cap. IIIWillfredo William WalasAinda não há avaliações
- Practica 2bDocumento4 páginasPractica 2bsantiago pablo albertoAinda não há avaliações
- Laboratorio 1 FinalDocumento7 páginasLaboratorio 1 Finalceleste claroAinda não há avaliações
- Contreras Brandon U5 TrabajofinalDocumento17 páginasContreras Brandon U5 TrabajofinalBRANDON CONTRERAS RICALDAYAinda não há avaliações
- Guia 2 de PDSDocumento24 páginasGuia 2 de PDSJHORDAM MAXWELL GOMEZ TORRESAinda não há avaliações
- Labo 4Documento35 páginasLabo 4David Justiniano Chayña HanccoAinda não há avaliações
- 4 Informe FinalDocumento15 páginas4 Informe FinalRodrigo Arriaga TarquiAinda não há avaliações
- Ejercicios de Integrales de Línea, Superficie y VolumenNo EverandEjercicios de Integrales de Línea, Superficie y VolumenNota: 4 de 5 estrelas4/5 (2)
- Word To PDFDocumento3 páginasWord To PDFWashington QuevedoAinda não há avaliações
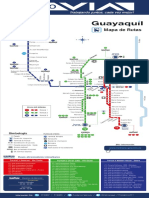
- Mapa Rutas PDFDocumento1 páginaMapa Rutas PDFWashington QuevedoAinda não há avaliações
- Diseoestructuradodealgoritmos 121010112546 Phpapp02 PDFDocumento89 páginasDiseoestructuradodealgoritmos 121010112546 Phpapp02 PDFWashington QuevedoAinda não há avaliações
- Cinemática y DinámicaDocumento5 páginasCinemática y DinámicaWashington QuevedoAinda não há avaliações
- Multijugador UnityDocumento4 páginasMultijugador UnityWashington QuevedoAinda não há avaliações
- Comenzar Con DropboxDocumento4 páginasComenzar Con Dropboxvalsar33Ainda não há avaliações
- DinámicaDocumento20 páginasDinámicaSandraaMGuzmanAinda não há avaliações
- Algoritmos y Estructuras de DatosDocumento306 páginasAlgoritmos y Estructuras de Datosanon_98280775Ainda não há avaliações
- MainboardDocumento7 páginasMainboardWashington QuevedoAinda não há avaliações
- Acceso A Una Base de Datos Oracle 11g Desde Java Utilizando NetbeansDocumento6 páginasAcceso A Una Base de Datos Oracle 11g Desde Java Utilizando NetbeansOmar MedinaAinda não há avaliações
- Estudio LateralidadDocumento111 páginasEstudio LateralidadWashington QuevedoAinda não há avaliações
- 5 Preguntas de CineDocumento2 páginas5 Preguntas de CineWashington QuevedoAinda não há avaliações
- Unidad de Disco DuroDocumento14 páginasUnidad de Disco DuroWashington QuevedoAinda não há avaliações
- ESCLAVOASI2Documento12 páginasESCLAVOASI2Washington QuevedoAinda não há avaliações
- (Incompleto) PLCDocumento5 páginas(Incompleto) PLCMauricio SalazarAinda não há avaliações
- G2Washington Quevedo Pérez EsculturaDocumento9 páginasG2Washington Quevedo Pérez EsculturaWashington QuevedoAinda não há avaliações
- Significacion Del CineDocumento14 páginasSignificacion Del CineWashington QuevedoAinda não há avaliações
- Mantenimiento FinalDocumento10 páginasMantenimiento FinalWashington QuevedoAinda não há avaliações
- Media OndaDocumento2 páginasMedia OndaWashington QuevedoAinda não há avaliações
- Contadores RapidosDocumento5 páginasContadores RapidosWashington QuevedoAinda não há avaliações
- Foro 2Documento2 páginasForo 2Washington QuevedoAinda não há avaliações
- Por Qué en Europa El Estándar de Distribución Eléctrica Es 220VDocumento3 páginasPor Qué en Europa El Estándar de Distribución Eléctrica Es 220VWashington QuevedoAinda não há avaliações
- Paperieee1 120709011808 Phpapp02Documento7 páginasPaperieee1 120709011808 Phpapp02Washington QuevedoAinda não há avaliações
- 30534805.Xls Paseo Por Microsoft Excel SolverDocumento16 páginas30534805.Xls Paseo Por Microsoft Excel SolverDiego_Puerta_8112Ainda não há avaliações
- Ejemplos de Objetivos y Como Hacer Un InformeDocumento3 páginasEjemplos de Objetivos y Como Hacer Un InformeWashington QuevedoAinda não há avaliações
- Web Publishing Con Lab ViewDocumento8 páginasWeb Publishing Con Lab ViewPedro ChambiAinda não há avaliações
- Descripcion Normas APADocumento5 páginasDescripcion Normas APAGeovanny CudcoAinda não há avaliações
- Practica MatLabDocumento23 páginasPractica MatLabWashington QuevedoAinda não há avaliações
- Conversores DC-DCDocumento16 páginasConversores DC-DCWashington QuevedoAinda não há avaliações
- MSDS Perfumador Ambiental MartellDocumento4 páginasMSDS Perfumador Ambiental Martelljefeqhse BIAinda não há avaliações
- Especificaciones Técnicas de Aa Call CenterDocumento30 páginasEspecificaciones Técnicas de Aa Call CenterIngemeQ SASAinda não há avaliações
- La MotivaciónDocumento2 páginasLa MotivaciónFrancisco López SalgadoAinda não há avaliações
- 3 Competencia MoralDocumento4 páginas3 Competencia MoralIsrael Perea Marrufo100% (1)
- Practica 4Documento2 páginasPractica 4Cielo Karina (Sky)Ainda não há avaliações
- Art Inventario de Recursos Gastronómicos Del Canton NaranjalDocumento9 páginasArt Inventario de Recursos Gastronómicos Del Canton NaranjalCarlos Cardoso JiménezAinda não há avaliações
- Las 11 FespDocumento14 páginasLas 11 FespMilu MarchAinda não há avaliações
- Acta de Inclusion Y Renuncia de Asociados CooperativaDocumento8 páginasActa de Inclusion Y Renuncia de Asociados CooperativaJean Morales100% (1)
- RAP3Documento6 páginasRAP3Jennifer AfricanoAinda não há avaliações
- PhytoDocumento5 páginasPhytoAdelirda AcuñaAinda não há avaliações
- 1a GUIA 1er P. 9º CAST. 2020Documento5 páginas1a GUIA 1er P. 9º CAST. 2020yulis tejedor perezAinda não há avaliações
- Pat SextoDocumento15 páginasPat Sextoorlando rivasAinda não há avaliações
- Cuadro Comparativo de Paradigmas de InvestigaciónDocumento3 páginasCuadro Comparativo de Paradigmas de InvestigaciónClariMarín100% (2)
- Proy. Social PPT Sem 2 2021 - 5Documento11 páginasProy. Social PPT Sem 2 2021 - 5Luis Leo DomAinda não há avaliações
- Informe Estadistico Sobre Dispositivos de Prevencion y Asistencia. Sedronar 2016Documento37 páginasInforme Estadistico Sobre Dispositivos de Prevencion y Asistencia. Sedronar 2016Ana Zulay EspinozaAinda não há avaliações
- Wallach. Interpretación Clínica de Pruebas Diagnósticas 9na. Edición Mary A. Williamson & Michel L. Snyder PDFDocumento1.559 páginasWallach. Interpretación Clínica de Pruebas Diagnósticas 9na. Edición Mary A. Williamson & Michel L. Snyder PDFyisela100% (4)
- Taller 1 Estadistica Conceptos BásicosDocumento4 páginasTaller 1 Estadistica Conceptos BásicosAndrea RincónAinda não há avaliações
- 100 Preguntas de Carlos MarxDocumento8 páginas100 Preguntas de Carlos MarxEdgar Alberto Balderas Vasquez0% (1)
- FO-UBP-08 Formulario de Registro de DistribuidoraDocumento1 páginaFO-UBP-08 Formulario de Registro de Distribuidorawlay2627gmailcom20% (5)
- Act 07. Estructura Organizacional de Las Empresas y Tipos de OrganigramasDocumento15 páginasAct 07. Estructura Organizacional de Las Empresas y Tipos de OrganigramasJuan David GONZALEZ PALENCIAAinda não há avaliações
- Producto Academico #1Documento6 páginasProducto Academico #1Nicolle Vila GalvanAinda não há avaliações
- Vocabulario InglesDocumento106 páginasVocabulario InglesIngles Antuquenu Andino100% (5)
- Contabildad de Costo Unid 1Documento12 páginasContabildad de Costo Unid 1Edwin MedranoAinda não há avaliações
- Historia de La Puc, Krebs PDFDocumento684 páginasHistoria de La Puc, Krebs PDFOmar Cabezas FloresAinda não há avaliações
- 3.1.2. Hormonas y Su ClasificaciónDocumento4 páginas3.1.2. Hormonas y Su ClasificaciónJuan CarlosAinda não há avaliações
- TP3 - Enunciado de La Actividad 2 - LÍDERDocumento2 páginasTP3 - Enunciado de La Actividad 2 - LÍDERCamila BayerAinda não há avaliações
- Análisis Bromatológico de BebidasDocumento28 páginasAnálisis Bromatológico de BebidasAnonymous AMS838WqAinda não há avaliações
- Neuromarketing Digital Y Su Importancia para Desarrollar Contenido de Valor en Redes SocialesDocumento12 páginasNeuromarketing Digital Y Su Importancia para Desarrollar Contenido de Valor en Redes Socialesjesús escobar cacallicaAinda não há avaliações
- Mapa Genero NarrativoDocumento54 páginasMapa Genero NarrativoLau Sandoval100% (1)
- El ComentarioDocumento2 páginasEl ComentarioPokémon LatinoAinda não há avaliações