Você também pode gostar
- Puente Clase 5 Elementos de EstabilidadDocumento20 páginasPuente Clase 5 Elementos de EstabilidadAlexis Andres Calderon Arcos100% (1)
- Cuadernillo de Estabilidad DON ALBERTO JDocumento50 páginasCuadernillo de Estabilidad DON ALBERTO JRonal100% (1)
- Ejercicio estabilidad modelos escalaDocumento44 páginasEjercicio estabilidad modelos escalazandryta2000Ainda não há avaliações
- Ponton Arreglo General TodoDocumento62 páginasPonton Arreglo General TodoMihuler Yordy Romero RojasAinda não há avaliações
- Plan de Tesis Remolcador FinalDocumento18 páginasPlan de Tesis Remolcador FinalIvan Pino FigueroaAinda não há avaliações
- Buques Duros y Buques Blando1 PDFDocumento2 páginasBuques Duros y Buques Blando1 PDFYenisel Aguilar100% (1)
- Transporte Maritimo IIDocumento7 páginasTransporte Maritimo IIAlexis Andres Calderon ArcosAinda não há avaliações
- Motorista II ADocumento1 páginaMotorista II AOscar Matus CarrilloAinda não há avaliações
- Tiro y ArrastreDocumento4 páginasTiro y ArrastreMikhail Roy Dela CruzAinda não há avaliações
- Cargamento de GranosDocumento32 páginasCargamento de Granosmostra994Ainda não há avaliações
- 3 AmarrasDocumento9 páginas3 AmarrasAndi SanchezAinda não há avaliações
- Experiencias de EstabilidadDocumento28 páginasExperiencias de EstabilidadUlysses CaynnãAinda não há avaliações
- Hélices de buques: tipos, materiales y funcionesDocumento3 páginasHélices de buques: tipos, materiales y funcionesMoises RomeroAinda não há avaliações
- Guia Calculos Hidrostaticos. Ing - Victor Romero PDFDocumento19 páginasGuia Calculos Hidrostaticos. Ing - Victor Romero PDFjuliolarrealAinda não há avaliações
- Adopción Del Código Internacional de Estabilidad Sin Avería, 2008 (Código IS 2008) PDFDocumento105 páginasAdopción Del Código Internacional de Estabilidad Sin Avería, 2008 (Código IS 2008) PDFrafael espinosa semperAinda não há avaliações
- UserGuide PDFDocumento118 páginasUserGuide PDFJose Lopez GarciaAinda não há avaliações
- Cálculo de Francobordo - 22Documento7 páginasCálculo de Francobordo - 22Adrian TeranAinda não há avaliações
- Guía para Generar Un Casco en ModelmakerDocumento13 páginasGuía para Generar Un Casco en ModelmakerjuliolarrealAinda não há avaliações
- OMI 1.02 - Unidad VIIDocumento5 páginasOMI 1.02 - Unidad VIIAcamarAinda não há avaliações
- Manual Curso Omi 1 19 Técnicas de Supervivencia Personal PDFDocumento68 páginasManual Curso Omi 1 19 Técnicas de Supervivencia Personal PDFRodolfoGodoyAinda não há avaliações
- Preguntas EcdisDocumento5 páginasPreguntas EcdisGuillermo GiraldoAinda não há avaliações
- Examen Navegación IIIDocumento3 páginasExamen Navegación IIIORLANDO100% (1)
- Imprimir Manual EspañolDocumento39 páginasImprimir Manual EspañolRicardo GarateAinda não há avaliações
- Planificación de Su ViajeDocumento2 páginasPlanificación de Su ViajeCristian Testa100% (1)
- Estabilidad inicial y grandes escorasDocumento8 páginasEstabilidad inicial y grandes escorasJosé LauraAinda não há avaliações
- Buque TanqueDocumento17 páginasBuque TanqueGabriel Tores0% (1)
- Esfuerzos A Los Cuales El Buque Está SujetoDocumento6 páginasEsfuerzos A Los Cuales El Buque Está SujetoArturo LooAinda não há avaliações
- Gruas y Plumas, AnchorDocumento28 páginasGruas y Plumas, AnchorAleex RGAinda não há avaliações
- DISEÑO PRELIMINAR DE UNA EMBARCACIÓN RECOLECTORA DE LECHUGUINES v01.00Documento127 páginasDISEÑO PRELIMINAR DE UNA EMBARCACIÓN RECOLECTORA DE LECHUGUINES v01.00Sergio AnguloAinda não há avaliações
- Criterios de estabilidad mínimos para buquesDocumento2 páginasCriterios de estabilidad mínimos para buquesjosegAinda não há avaliações
- PER - NAUTICA - Apuntes Per MeteorologiaDocumento11 páginasPER - NAUTICA - Apuntes Per MeteorologiaMamen De OzAinda não há avaliações
- Administracion de BuquesDocumento2 páginasAdministracion de BuquesSanthiago MolinaAinda não há avaliações
- Granelero Politecnico de MadridDocumento847 páginasGranelero Politecnico de MadridmaryeltorresAinda não há avaliações
- Ejercicios Centroide y Momento InerciaDocumento3 páginasEjercicios Centroide y Momento InerciaSantiago Suárez TovarAinda não há avaliações
- Curso Omi 1.01 Formacion Basica en Operaciones de Carga de Petroleros Y Quimiqueros U.T. 7 Operaciones de Carga Y DescargaDocumento21 páginasCurso Omi 1.01 Formacion Basica en Operaciones de Carga de Petroleros Y Quimiqueros U.T. 7 Operaciones de Carga Y DescargaMauricio Gabriel Armijo RoblesAinda não há avaliações
- 7.2. Geometria de La HeliceDocumento8 páginas7.2. Geometria de La HeliceGenesis CabelloAinda não há avaliações
- MSC.1-Circ.1229 - Directrices para La Aprobación de Instrumentos de Estabilidad (Secretaría)Documento5 páginasMSC.1-Circ.1229 - Directrices para La Aprobación de Instrumentos de Estabilidad (Secretaría)JuanAinda não há avaliações
- Diseño preliminar de un granelero de 2500 TPMDocumento12 páginasDiseño preliminar de un granelero de 2500 TPMAngel RuizAinda não há avaliações
- Evaluación estabilidad buqueDocumento3 páginasEvaluación estabilidad buqueMarcelaAinda não há avaliações
- Plan de Remolque: Requisitos y ProcedimientosDocumento19 páginasPlan de Remolque: Requisitos y ProcedimientosCarlos Alberto Zamorano PizarroAinda não há avaliações
- Efecto Squat MejoradoDocumento5 páginasEfecto Squat MejoradoEduardo SeclenAinda não há avaliações
- La Seguridad y Calidad en Las Operaciones de Los Medios de Varada y Puesta A FloteDocumento9 páginasLa Seguridad y Calidad en Las Operaciones de Los Medios de Varada y Puesta A Floteanon_882295953Ainda não há avaliações
- Coeficiente PrismáticoDocumento2 páginasCoeficiente PrismáticoKarlos Quiquia100% (2)
- Meteorología BasicaDocumento25 páginasMeteorología Basicajose jose100% (1)
- Calculo de Bollar Pull - MatachinDocumento4 páginasCalculo de Bollar Pull - MatachinKevin TrujilloAinda não há avaliações
- Maniobras I Clase 1 Sistema de GobiernoDocumento55 páginasManiobras I Clase 1 Sistema de GobiernoEmanuel Ugaz SalazarAinda não há avaliações
- Mantenimiento Del BuqueDocumento12 páginasMantenimiento Del BuqueCesar CarruidoAinda não há avaliações
- AVANCEDocumento19 páginasAVANCEArcentales PaulAinda não há avaliações
- Arrufo y QuebrantoDocumento5 páginasArrufo y Quebrantojakju100% (1)
- Proyecto Bt. Tampico Obdulio Cesar SanchezDocumento66 páginasProyecto Bt. Tampico Obdulio Cesar SanchezAbrahamPartidaAinda não há avaliações
- Procedimiento Sistema de Propulsion y GobiernoDocumento8 páginasProcedimiento Sistema de Propulsion y GobiernoCarlos Auvin Rojas LeonAinda não há avaliações
- Trabajo de Olas, Teoria Del Buque IIDocumento18 páginasTrabajo de Olas, Teoria Del Buque IIAlejandro Mujica100% (1)
- Examen Estabilidad - Rafael Mora ValenzuelaDocumento9 páginasExamen Estabilidad - Rafael Mora ValenzuelaAndres CaribaldiAinda não há avaliações
- Normas relativas a las guardias en buquesDocumento6 páginasNormas relativas a las guardias en buquesFernandoAinda não há avaliações
- Certificado de Rutas NavegadasDocumento1 páginaCertificado de Rutas NavegadasBrayian DuranAinda não há avaliações
- Altura MetacéntricaDocumento8 páginasAltura MetacéntricaNilton GamarraAinda não há avaliações
- Arquitectura Naval 5Documento30 páginasArquitectura Naval 5SilviaCueva100% (2)
- Centro de CarenaDocumento11 páginasCentro de CarenaMiguel Angel Castro Ramos100% (1)
- Criterios de EstabilidadDocumento6 páginasCriterios de Estabilidadkikered21Ainda não há avaliações
- Método de SavitskyDocumento6 páginasMétodo de SavitskyLuis CollAinda não há avaliações
- Estabilidad VelerosDocumento6 páginasEstabilidad Velerostrolley64Ainda não há avaliações
- La Enciclopedia: HumanaDocumento1 páginaLa Enciclopedia: HumanaAnder Lasa GAinda não há avaliações
- CañamoDocumento1 páginaCañamoAnder Lasa GAinda não há avaliações
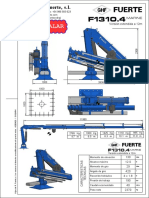
- Grúa Fuerte F1310ar 4 - Catalogo A INSTALARDocumento2 páginasGrúa Fuerte F1310ar 4 - Catalogo A INSTALARAnder Lasa G100% (1)
- Acs CP1Documento3 páginasAcs CP1Ander Lasa GAinda não há avaliações
- 50 ANIVERSARIO TecnunDocumento204 páginas50 ANIVERSARIO TecnunAnder Lasa GAinda não há avaliações
- Cálculos de Centros de Gravedad Y Pesos: Buque Según Experiencia 170.650 TN 10.245 M 2.966 M 0.000 TNDocumento9 páginasCálculos de Centros de Gravedad Y Pesos: Buque Según Experiencia 170.650 TN 10.245 M 2.966 M 0.000 TNAnder Lasa GAinda não há avaliações
- Signos gráficos para planos de lucha contra incendiosDocumento15 páginasSignos gráficos para planos de lucha contra incendiosAnder Lasa GAinda não há avaliações
- PDF ACEROS Construccion1Documento1 páginaPDF ACEROS Construccion1SeshAinda não há avaliações
- El Efecto Del Bulbo de Proa en El Comportamiento Del BuqueDocumento20 páginasEl Efecto Del Bulbo de Proa en El Comportamiento Del BuqueKARGAinda não há avaliações
- Tema para Las Exposiciones de Resistencia Al AvanceDocumento3 páginasTema para Las Exposiciones de Resistencia Al Avancejose ramirezAinda não há avaliações
- Informe R TrmarsaDocumento6 páginasInforme R TrmarsaCarlos Auvin Rojas LeonAinda não há avaliações
- Estabilidad Del Buque y ExamenDocumento4 páginasEstabilidad Del Buque y ExamenMaría Fernanda CañizalesAinda não há avaliações
- Plano PontónDocumento1 páginaPlano PontónMatiasAinda não há avaliações
- A4 RHN 081 SuplementoDocumento57 páginasA4 RHN 081 SuplementoAnaRitaTrindadeAinda não há avaliações
- Historiador marítimo González EchegarayDocumento2 páginasHistoriador marítimo González EchegarayrstandveAinda não há avaliações
- 1-Tecnologia NavalDocumento22 páginas1-Tecnologia NavalCarlos MoyaAinda não há avaliações
- Galeria de PiratasDocumento2 páginasGaleria de PiratasJose DelgadoAinda não há avaliações
- DIANCADocumento5 páginasDIANCAmrauseobAinda não há avaliações
- EstabilidadDocumento2 páginasEstabilidadtonyAinda não há avaliações
- Nomenclatura náutica de buquesDocumento49 páginasNomenclatura náutica de buquesJesusMontesAraujoAinda não há avaliações
- John Paul JonesDocumento3 páginasJohn Paul JonesIvelssi PeñaAinda não há avaliações
- Informe Del AñoDocumento4 páginasInforme Del AñoJhonny madridAinda não há avaliações
- Casco de Un Velero. TesisDocumento99 páginasCasco de Un Velero. Tesisnauta007Ainda não há avaliações
- Catálogo Barcos y Otros 17 18Documento48 páginasCatálogo Barcos y Otros 17 18Susana Esmeralda Vega De EliasAinda não há avaliações
- Alerce PDFDocumento18 páginasAlerce PDFAlberto BoneAinda não há avaliações
- Cálculos portuarios: olas, rompeolas, dimensiones muellesDocumento3 páginasCálculos portuarios: olas, rompeolas, dimensiones muellesEdilberto CutisacaAinda não há avaliações
- Estructuras de MaderaDocumento10 páginasEstructuras de MaderaAbraham Suclupe CaroAinda não há avaliações
- Simulacion de Examen Prefectura ArgentinaDocumento3 páginasSimulacion de Examen Prefectura Argentinaanon_861067602100% (2)
- Maritime Security Operative CourseDocumento2 páginasMaritime Security Operative CourseAnonymous pOggsIhOMAinda não há avaliações
- Estabilidad Estática TransversalDocumento5 páginasEstabilidad Estática TransversalAlex Rodriguez100% (1)
- CONTEXTUALIZACIÓN EmpresaDocumento5 páginasCONTEXTUALIZACIÓN EmpresadayanaAinda não há avaliações
- Proforma para Bote MilitarDocumento4 páginasProforma para Bote MilitarCarl EtenAinda não há avaliações
- Transporte MaritimoDocumento42 páginasTransporte MaritimoUlises Bravo DíazAinda não há avaliações
- 17 Manuel LombanDocumento4 páginas17 Manuel LombanAxoncomunicacion100% (1)
- Remolcadores CaciqueDocumento1 páginaRemolcadores CaciqueJCAAinda não há avaliações
- Reglamento Internacional para prevenir abordajes en la marDocumento12 páginasReglamento Internacional para prevenir abordajes en la marSergio HernandezAinda não há avaliações
- Caso PracticoDocumento5 páginasCaso PracticoSandra BautistaAinda não há avaliações
- Uni - FN - MV 113 - Unidad 8 - Estruct. - Buque - (02) - 2011 PDFDocumento16 páginasUni - FN - MV 113 - Unidad 8 - Estruct. - Buque - (02) - 2011 PDFAnonymous wNqPUu6Ainda não há avaliações