Você também pode gostar
- Guidelines La - Studii UptDocumento5 páginasGuidelines La - Studii Uptda_116107118Ainda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- SUCOS 2013/2015-2C11 Business Economics and EntrepreneurshipDocumento1 páginaSUCOS 2013/2015-2C11 Business Economics and Entrepreneurshipda_116107118Ainda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
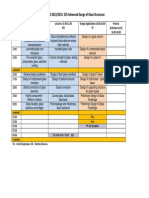
- Schedule 2013-2015Documento1 páginaSchedule 2013-2015da_116107118Ainda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- SUCOS 2013/2015-2C08 Advanced Design of Steel and Composite StructuresDocumento1 páginaSUCOS 2013/2015-2C08 Advanced Design of Steel and Composite Structuresda_116107118Ainda não há avaliações
- SUCOS 2013/2015-2E5 Advanced Design of Glass StructuresDocumento1 páginaSUCOS 2013/2015-2E5 Advanced Design of Glass Structuresda_116107118Ainda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- 07 - Transport Public LocalDocumento1 página07 - Transport Public Localda_116107118Ainda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Inginerie Civila (Engleza)Documento3 páginasInginerie Civila (Engleza)da_116107118Ainda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Guidance Paper L: European CommissionDocumento42 páginasGuidance Paper L: European Commissionda_116107118Ainda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Hollow Sections and Steel Grades: Advisory DeskDocumento1 páginaHollow Sections and Steel Grades: Advisory Deskda_116107118Ainda não há avaliações
- Question Text: FeedbackDocumento12 páginasQuestion Text: FeedbackANGELU RANE BAGARES INTOLAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Proceeding of The 3rd Annul National Conference On Agriculture and Environmental Management For Sustainable Development From June 17-18, 2016Documento277 páginasProceeding of The 3rd Annul National Conference On Agriculture and Environmental Management For Sustainable Development From June 17-18, 2016Tolasa RegasaAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Female Autism Phenotype and Camouflaging - A Narrative ReviewDocumento12 páginasThe Female Autism Phenotype and Camouflaging - A Narrative ReviewjoannadepaoliAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- OpenStax Psychology2e APA Guidelines MapDocumento17 páginasOpenStax Psychology2e APA Guidelines MapmaritasvAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Vision Test JaegerDocumento1 páginaVision Test JaegerManivannanMudhaliar100% (2)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Ce Correl Ports and Harbor (B)Documento5 páginasCe Correl Ports and Harbor (B)Glenn Frey Layug0% (1)
- Arrays: Instructor's Manual Table of ContentsDocumento10 páginasArrays: Instructor's Manual Table of ContentsLeonard GojerAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- O2-4 Lovric D Full PDFDocumento5 páginasO2-4 Lovric D Full PDFZadia CottoAinda não há avaliações
- Adopting and Adapting Arbitration For Climate ChangeRelated DisputesDocumento9 páginasAdopting and Adapting Arbitration For Climate ChangeRelated DisputescontestantlauAinda não há avaliações
- Internship Report 1Documento27 páginasInternship Report 1Saarthak AgarwalAinda não há avaliações
- Cinema, Pain and Pleasure Consent and The Controlled BodyDocumento244 páginasCinema, Pain and Pleasure Consent and The Controlled BodyRadically DarkAinda não há avaliações
- Sports PsychologyDocumento26 páginasSports PsychologyHabiya TauseefAinda não há avaliações
- Uise Turgeon: and TechniqueDocumento456 páginasUise Turgeon: and TechniqueybiernasdonAinda não há avaliações
- Science Lesson Plan 2 VertebratesDocumento2 páginasScience Lesson Plan 2 VertebratesJogie Ledesma100% (2)
- Analytical Method Development and Validation of Stability Indicating RP-HPLC Method For Estimation of Lercanidipine Hydrochloride and Enalapril Maleate in CombinationDocumento8 páginasAnalytical Method Development and Validation of Stability Indicating RP-HPLC Method For Estimation of Lercanidipine Hydrochloride and Enalapril Maleate in CombinationBaru Chandrasekhar RaoAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- CV - Elchin SalimovDocumento3 páginasCV - Elchin SalimovMicRoToneAinda não há avaliações
- 10 0096 02 7RP AFP tcm142-701153Documento16 páginas10 0096 02 7RP AFP tcm142-701153tyrusmoneykingAinda não há avaliações
- KPK SST PD PDFDocumento1 páginaKPK SST PD PDFArshad AliAinda não há avaliações
- Modern Public School: HOLIDAY HOME WORK, 2021-2022 Class Xii, ScienceDocumento23 páginasModern Public School: HOLIDAY HOME WORK, 2021-2022 Class Xii, Scienceaaditya sharmaAinda não há avaliações
- United Nations Convention On The Law of The SeaDocumento17 páginasUnited Nations Convention On The Law of The SeaDara Compuesto100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- GulfSea Synth Gear Oil PG220Documento2 páginasGulfSea Synth Gear Oil PG220Md.Obydur RahmanAinda não há avaliações
- Fluorescence in Situ HybridizationDocumento3 páginasFluorescence in Situ HybridizationUshuaia Ira Marie L. GallaronAinda não há avaliações
- Research Methodology in CommerceDocumento6 páginasResearch Methodology in CommerceSåntøsh YådåvAinda não há avaliações
- Mid Semester Test Bahasa Inggris Kelas B-KB Kamis 22 April 2021 Waktu: 16.15 - 17.45 (90 Minutes) Via Gmeet Your Name: Your Student Id/Nim: 200211020Documento17 páginasMid Semester Test Bahasa Inggris Kelas B-KB Kamis 22 April 2021 Waktu: 16.15 - 17.45 (90 Minutes) Via Gmeet Your Name: Your Student Id/Nim: 200211020Felano LaatungAinda não há avaliações
- Spin Your Self Talk: A Guide To Breaking Out of A Self-Talk RutDocumento11 páginasSpin Your Self Talk: A Guide To Breaking Out of A Self-Talk RutAmelia HandayaniAinda não há avaliações
- MotivationDocumento11 páginasMotivationSherif AwadAinda não há avaliações
- Irrigation Engineering 2015 2019Documento12 páginasIrrigation Engineering 2015 2019SIDDHARTHA MAITYAinda não há avaliações
- 02 Midterm Module For Business MarketingDocumento36 páginas02 Midterm Module For Business MarketingMyren Ubay SerondoAinda não há avaliações
- Week 13 & 14 - LecturesDocumento46 páginasWeek 13 & 14 - LecturesAmyHuiAinda não há avaliações
- MacroenvironmentDocumento2 páginasMacroenvironmentAlan-Vital Samin Av-sAinda não há avaliações