Você também pode gostar
- ABB RPBA 01 Profibus DP Adapter Module Start GuideDocumento5 páginasABB RPBA 01 Profibus DP Adapter Module Start GuideAn Sang0% (1)
- PLC-Driver (V5) Selectron - Ethernet TCP-IPDocumento7 páginasPLC-Driver (V5) Selectron - Ethernet TCP-IPbatuhan kılıçAinda não há avaliações
- Devicenet: Commissioning Examples Scalable PLC For Individual AutomationDocumento28 páginasDevicenet: Commissioning Examples Scalable PLC For Individual AutomationJuan Pablo Galvan CamachoAinda não há avaliações
- Commissioning Example Scalable PLC For Individual AutomationDocumento8 páginasCommissioning Example Scalable PLC For Individual AutomationJuan Pablo Galvan CamachoAinda não há avaliações
- Infoplc Net s7 Fc300Documento10 páginasInfoplc Net s7 Fc300Patricio Antonio Cortés PeñaAinda não há avaliações
- Datasheet Epos 24 5Documento3 páginasDatasheet Epos 24 5Halima TamboAinda não há avaliações
- UFOM SDK Developer's Manual - v5.0 - EngDocumento186 páginasUFOM SDK Developer's Manual - v5.0 - EngbrnyzaAinda não há avaliações
- Kld150S UserDocumento108 páginasKld150S UserЭрдэнэсайхан СайндооAinda não há avaliações
- Technote DWDM 00 - 2Documento12 páginasTechnote DWDM 00 - 2integragroupinfoAinda não há avaliações
- Modbus Map OmronDocumento6 páginasModbus Map OmronhellboylovingAinda não há avaliações
- TRW-24G 2.4GHz RF Tranceiver Module Data Sheet EDocumento59 páginasTRW-24G 2.4GHz RF Tranceiver Module Data Sheet Ephongphat100% (1)
- NOJA-508-02 Modbus Protocol ImplementationDocumento18 páginasNOJA-508-02 Modbus Protocol Implementationpatricio2015100% (1)
- (D0301) Profibus Quick Startup Guide V1.0Documento43 páginas(D0301) Profibus Quick Startup Guide V1.0mr3478Ainda não há avaliações
- Programming Language of Parker 6400 CompumotorDocumento362 páginasProgramming Language of Parker 6400 CompumotormihainecsulescuAinda não há avaliações
- Siemens PLC With TIA Portal V12 Prof SP1 enDocumento52 páginasSiemens PLC With TIA Portal V12 Prof SP1 enernesto antonioAinda não há avaliações
- Motorola Canopy PMP 100 and PMP 200 ReviewDocumento10 páginasMotorola Canopy PMP 100 and PMP 200 ReviewSynworks Development GroupAinda não há avaliações
- Set Up The Micro Master 4Documento2 páginasSet Up The Micro Master 4Châu Vĩnh LợiAinda não há avaliações
- GE - d60 Line Distance ProtectionDocumento668 páginasGE - d60 Line Distance ProtectionPhil KerrAinda não há avaliações
- RTL 4826c Programming Manual Analog Msf5000!68!80310b31Documento87 páginasRTL 4826c Programming Manual Analog Msf5000!68!80310b31detschelAinda não há avaliações
- APN-049 Process Bus - Circuit Breaker Position Feedback Via GOOSEDocumento11 páginasAPN-049 Process Bus - Circuit Breaker Position Feedback Via GOOSEBerat GündoğanAinda não há avaliações
- GE D60 Relay ManualDocumento704 páginasGE D60 Relay ManualdmjbooksAinda não há avaliações
- USER MANUAL Mab - 51Documento93 páginasUSER MANUAL Mab - 51Pushpinder Singh KhalsaAinda não há avaliações
- Manual On Siemens Software and Cable Configurations PDFDocumento7 páginasManual On Siemens Software and Cable Configurations PDFjaimeasisaAinda não há avaliações
- Cemengal S.A. / Colombia Profinet ConnectionDocumento20 páginasCemengal S.A. / Colombia Profinet ConnectionreinelvillarAinda não há avaliações
- Commissioning Example Scalable PLC For Individual AutomationDocumento10 páginasCommissioning Example Scalable PLC For Individual AutomationJuan Pablo Galvan CamachoAinda não há avaliações
- Base Processor Terminal CommandsDocumento66 páginasBase Processor Terminal CommandssharadsirohiAinda não há avaliações
- BSC6900V900R011 GO Data Configuration ISSUE1.0-20091130-BDocumento61 páginasBSC6900V900R011 GO Data Configuration ISSUE1.0-20091130-BUsersAinda não há avaliações
- Ford FANUC R30iA R30iB NextGen E83Documento83 páginasFord FANUC R30iA R30iB NextGen E83marialuisafloressanabriaAinda não há avaliações
- BK9103 Ek9300 6-30-11Documento103 páginasBK9103 Ek9300 6-30-11jorfleitasAinda não há avaliações
- Abbauto 50xm100n ManualDocumento165 páginasAbbauto 50xm100n ManualBromax DandanAinda não há avaliações
- TurboCNC v4Documento89 páginasTurboCNC v4John RobieAinda não há avaliações
- 04-BSC6900V900R011 GO Data Configuration ISSUE2.0-20100506-BDocumento61 páginas04-BSC6900V900R011 GO Data Configuration ISSUE2.0-20100506-Bsamiramahdavi100% (1)
- PD 667 Profibus - Slave Configuration Guide.: IndexDocumento7 páginasPD 667 Profibus - Slave Configuration Guide.: Indexwer974Ainda não há avaliações
- Modbus Protocol Implementation NOJA-508Documento15 páginasModbus Protocol Implementation NOJA-508JoseSanchez50% (2)
- Abb PDP 22-fbpDocumento38 páginasAbb PDP 22-fbpVenkatesh SubramanyaAinda não há avaliações
- General Description: USB To Ethernet MAC Controller With Integrated 10/100 PHYDocumento54 páginasGeneral Description: USB To Ethernet MAC Controller With Integrated 10/100 PHYReza ToghraeeAinda não há avaliações
- Machine Language Coding and The Debug Software Development Program of The PCDocumento13 páginasMachine Language Coding and The Debug Software Development Program of The PCsai420Ainda não há avaliações
- Micro Controller Lab Manual 1Documento38 páginasMicro Controller Lab Manual 1Suresh KumarAinda não há avaliações
- Service & Support: Configuration of An S7-300 CPU As DP Slave To A CP 342-5 As DP MasterDocumento14 páginasService & Support: Configuration of An S7-300 CPU As DP Slave To A CP 342-5 As DP MasterMateo QuispeAinda não há avaliações
- C60 Breaker Protection System: UR Series Instruction ManualDocumento582 páginasC60 Breaker Protection System: UR Series Instruction Manualceleritas81Ainda não há avaliações
- Trio Manual51Documento252 páginasTrio Manual51bmrajahAinda não há avaliações
- Oce Remote ControlDocumento216 páginasOce Remote ControlLoraine Lipalam Juanitas100% (1)
- DGS-3600 Series Firmware Release Notes R2.80B31 (For WW)Documento19 páginasDGS-3600 Series Firmware Release Notes R2.80B31 (For WW)tntenoboaAinda não há avaliações
- Hillstone All Series Device Troubleshooting and Debug GuideDocumento134 páginasHillstone All Series Device Troubleshooting and Debug GuideWAMS FILE100% (1)
- ATV Process On Ethernet With M221: (I/O Profile, Using WRITE - READ - VAR)Documento12 páginasATV Process On Ethernet With M221: (I/O Profile, Using WRITE - READ - VAR)Frederson OlayaAinda não há avaliações
- EtherWAN M29060-A00 User ManualDocumento177 páginasEtherWAN M29060-A00 User ManualJMAC SupplyAinda não há avaliações
- Fc202 Danfoss Manual ProgramareDocumento246 páginasFc202 Danfoss Manual ProgramareRaducan Teodor100% (1)
- PIM-PB-01 - Profibus Interface: 1. InstallationDocumento10 páginasPIM-PB-01 - Profibus Interface: 1. InstallationweiyaAinda não há avaliações
- TurboCNC v4.01 Documentation1Documento89 páginasTurboCNC v4.01 Documentation1srinarongAinda não há avaliações
- 5.2 Cp0201, Cp0291, Cp0292: X20 Module - Compact Cpus - Cp0201, Cp0291, Cp0292Documento9 páginas5.2 Cp0201, Cp0291, Cp0292: X20 Module - Compact Cpus - Cp0201, Cp0291, Cp0292calripkenAinda não há avaliações
- T300Documento56 páginasT300eng_karamazabAinda não há avaliações
- NAPRF04I Interface Protocol For DC Drives Through PROFIBUS-DPDocumento27 páginasNAPRF04I Interface Protocol For DC Drives Through PROFIBUS-DPmpeneloAinda não há avaliações
- In System Programming With 8051Documento7 páginasIn System Programming With 8051vmateixeiraAinda não há avaliações
- Profibus Manual EnglishDocumento87 páginasProfibus Manual Englishpecirepi0% (1)
- An10221 2Documento14 páginasAn10221 2Lysle E Shields IIIAinda não há avaliações
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusNo EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusAinda não há avaliações
- Multicore DSP: From Algorithms to Real-time Implementation on the TMS320C66x SoCNo EverandMulticore DSP: From Algorithms to Real-time Implementation on the TMS320C66x SoCAinda não há avaliações
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkAinda não há avaliações
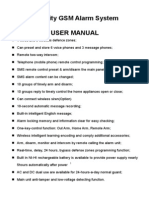
- GSM ALARMDocumento17 páginasGSM ALARMDragan StanicAinda não há avaliações
- Gerflor Card Taralay Impression Uni en - PDF - 348 - EnrichDocumento12 páginasGerflor Card Taralay Impression Uni en - PDF - 348 - EnrichMartinAinda não há avaliações
- Georg Lukacs, Art and Objective Truth.Documento11 páginasGeorg Lukacs, Art and Objective Truth.Pradeepa Serasinghe0% (1)
- Creating NC FilesDocumento8 páginasCreating NC FilesStelian ConstantinescuAinda não há avaliações
- Physics Chapter 3 Practice TestDocumento2 páginasPhysics Chapter 3 Practice TestVanessa Bugarin MananzanAinda não há avaliações
- Personal Details:: User ID Candidate's NameDocumento9 páginasPersonal Details:: User ID Candidate's NameAnkur SharmaAinda não há avaliações
- Ventures Priamry Heritage-Social StudiesDocumento128 páginasVentures Priamry Heritage-Social StudiesWryter Business100% (2)
- Rim and Face - Alignment KnowledgeDocumento19 páginasRim and Face - Alignment Knowledgevj kumarAinda não há avaliações
- 2nd Year English Send Up 22Documento2 páginas2nd Year English Send Up 22Keats 28Ainda não há avaliações
- Maximum Remaining - CodeChefDocumento3 páginasMaximum Remaining - CodeChefShubhi SinghAinda não há avaliações
- Business Graphic CollectionDocumento213 páginasBusiness Graphic CollectionHimansu Sekhar PradhanAinda não há avaliações
- Rahul Prakash SalunkeDocumento2 páginasRahul Prakash SalunkesalunkerahulAinda não há avaliações
- Course On Fracture Mechanics - IIT RoparDocumento248 páginasCourse On Fracture Mechanics - IIT RoparSumit BasuAinda não há avaliações
- Sizing BasicsDocumento38 páginasSizing BasicsAmir YasinAinda não há avaliações
- Lesson Plan in Oral Communication in ContextDocumento2 páginasLesson Plan in Oral Communication in ContextYoutube TutorialsAinda não há avaliações
- Drawbacks of The Existing SystemDocumento7 páginasDrawbacks of The Existing SystemSachin Mohite100% (1)
- Mewar University Chittorgarh - Power System EngineeringDocumento38 páginasMewar University Chittorgarh - Power System Engineeringnved01Ainda não há avaliações
- ROBT308Lecture22Spring16 PDFDocumento52 páginasROBT308Lecture22Spring16 PDFrightheartedAinda não há avaliações
- Java Programming 9Th Edition Farrell Solutions Manual Full Chapter PDFDocumento32 páginasJava Programming 9Th Edition Farrell Solutions Manual Full Chapter PDFaletheasophroniahae100% (9)
- Answers To Case Application Ch1-8Documento13 páginasAnswers To Case Application Ch1-8553601750% (2)
- TABLE: Concrete Column Summary - IS 456-2000 Story Label Unique Name Design Section Station Design/Check Status PMM RatioDocumento3 páginasTABLE: Concrete Column Summary - IS 456-2000 Story Label Unique Name Design Section Station Design/Check Status PMM Rationaveenpnaidu1Ainda não há avaliações
- Strategic Planning ModelDocumento55 páginasStrategic Planning ModelShamkant KomarpantAinda não há avaliações
- IJCM Vol 23 Issue 8Documento83 páginasIJCM Vol 23 Issue 8Daniel PratamaAinda não há avaliações
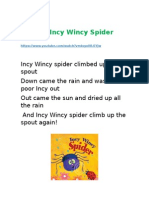
- Incy Wincy SpiderDocumento16 páginasIncy Wincy SpiderOlarteCatalinaAinda não há avaliações
- SCDocumento33 páginasSCKenan KoçakAinda não há avaliações
- Jnu PDFDocumento3 páginasJnu PDFvinitauppalAinda não há avaliações
- Geberit Case Study PDFDocumento2 páginasGeberit Case Study PDFsapiencecorpAinda não há avaliações
- The Age of EnlightenmentDocumento3 páginasThe Age of EnlightenmentIoana Botar100% (3)
- Cellular Respiration ExplanationDocumento2 páginasCellular Respiration Explanationvestermail50% (2)
- Caillau, Guillon. S. Ephræm. Opera Omnia. 1832. Volume 7.Documento540 páginasCaillau, Guillon. S. Ephræm. Opera Omnia. 1832. Volume 7.Patrologia Latina, Graeca et OrientalisAinda não há avaliações