Escolar Documentos
Profissional Documentos
Cultura Documentos
AISC Engg Journal 92
Enviado por
shrwncmDescrição original:
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
AISC Engg Journal 92
Enviado por
shrwncmDireitos autorais:
Formatos disponíveis
Engineering
J ournal
AMERICAN INSTITUTE OF STEEL CONSTRUCTION, INC.
Page 1: Ronald D. Ziemian and William Mcguire
A Method for Incorporating Live Load Reduction
Provisions in Frame Analysis
Page 4: Krishna K. Verma and Fred R. Beckmann
High-Strength Bolts for Bridges
Page 12: Thomas R. Rauscher and Kurt H. Gerstle
Reliability of Rotational Behavior of Framing
Connections
Page 20: Patrick D. Zuraski
The Significance and Application of C
b
in
Beam Design
Page 26: J ack D. Bakos, J r. and J ames A. OLeary
An Equivalent Radius of Gyration Approach to
Flexural-Torsional Buckling for Singly
Symmetric Sections
Page 45: R. Shankar Nair
Forces on Bracing Systems
1st Quarter 1992/ Volume 29, No. 1
INTRODUCTION
The effects of live load are often reduced to reflect the low
probability of all live load existing simultaneously through-
out a substantial portion of a structure. Subject to certain
limitations, ASCE 7-88
1
provides the following permissible
reduction
L =
0.25 +
15
A
l
L
o
L
o
(1)
where:
L = reduced design live load
A
l
= member influence area in square feet
(A
l
400 ft
2
)
L
o
= unreduced design live load
= 0.5 for members supporting one floor and 0.4
otherwise
In the analysis of entire structural systems or substantial
portions thereof, methods for incorporating live load reduc-
tion are essential. They can have a significant influence on
a structures response. Not to include live load reduction
provisions may be overly conservative. For example, reduced
live loads may produce smaller second-order effects. In some
cases, however, use of full live load may be unconservative.
For example, full live load may not be in place to resist an
overturning moment produced by lateral load.
The incorporation of live load reduction provisions of the
type in ASCE 7-88 requires careful consideration when
analyzing structural systems. This is because (i) the influ-
ence area for beams and columns are generally different,
and (ii) Eq. 1 is a nonlinear function of this area. Several
methods for including live load reduction in system analyses
have been suggested.
2,3,4
These methods, however, have
only treated reduction of member forces for the purpose of
member proportioning. Also, they may produce member
forces that are not consistent with the calculated deflections
of the frame. With this in mind, a more comprehensive
method for incorporating live load reduction in system ana-
lyses has been developed.
5
OUTLINE OF APPROACH
The method is based on the use of compensating forces
calculated by: (a) applying beam live load reduction factors
to the column connected beams; (b) applying column live
load reduction factors to the columns; and (c) determining
any out of balance at the beam-to-column intersections.
Because columns typically have a larger influence area than
beams (providing for a larger reduction), the compensating
forces are generally upwardly directed (opposite of gravity).
All structural system analyses which include live load are
then performed by applying a combination of the reduced
beam live loads and the calculated compensating forces. By
applying this combination of live load, the resulting forces
A Method for Incorporating Live Load
Reduction Provisions in Frame Analysis
RONALD D. ZIEMIAN and WILLIAM McGUIRE
Ronald D. Ziemian is assistant professor of civil engineering,
Bucknell University, Lewisburg, PA.
William McGuire is professor of civil engineering, emeritus,
Cornell University, Ithaca, NY.
Fig. 1. Description of example frame.
FIRST QUARTER / 1992 1
in both the main girders and the columns will reflect the
ASCE-7 live load reduction provisions.
The frame shown in Fig. 1 will be used to illustrate the
determination of compensating forces. Each of the relevant
structural components in the frame is assigned a two part
identifier. The first part, a beam, column, or area number,
is defined in the plan view of Fig. 1. The second part, the
level (for beams and areas) or story (for columns), is pro-
vided in the corresponding elevation view. For example, the
member designation B1-3 refers to Beam 1 of level 3, and
C2-1 refers to Column 2 of story 1.
The following steps outline how the live load compensat-
ing forces could be calculated:
1. Based on tributary area, estimate the axial force in each
column without applying any reduction factors. For col-
umn C2-1 (see Fig. 2), an estimate of the unreduced
axial force is
F
C21
=
1
2
i = 1
3
[(
Bli
L
Bli
) + (
B2i
L
B2i
)
+ (
B9i
L
B9i
)] (2)
where:
Bji
= unreduced uniform live load along beam Bj-i
L
Bji
= length of beam Bj-i
(In lieu of assuming one-half of the beam loads con-
tributing to each of the column forces, a structural anal-
ysis that accounts for the actual continuity of the sys-
tem could be performed to obtain a more accurate
estimate of the column axial force distribution).
2. Based on each columns influence area, reduce the
above axial force by the ASCE 7-88 live load reduc-
tion factor (Eq. 1). For column C2-1, the reduced axial
force is
F
C21
=
0.25 +
15
F
C21
(3)
i = 1
3
(Area
1i
+ Area
2i
)
where:
i = 1
3
(Area
1i
+ Area
2i
) = total influence area for col-
umn C2-1.
Note that F
C21
should not be less than 0.4F
C21
.
3. Based on tributary area, estimate the axial force in each
column by applying only beam live load reduction fac-
tors. For column C2-1, this axial force is approximately
F
C21
=
1
2
i = 1
3
[(
B1i
L
B1i
) + (
B2i
L
B2i
)
+ (
B9i
L
B9i
)] (4)
where:
Bji
= reduced uniform live load along beam Bj-i
L
Bji
= length of beam Bj-i
As in step 1, a separate structural analysis could be per-
formed to obtain a more accurate estimate of these col-
umn axial forces.
4. Determine the difference in axial forces calculated in
steps 2 and 3. For column C2-1, this force is
F
C21
= F
C21
F
C21
(5)
5. Determine the additional upward axial force, compen-
sating force, to be applied at the top of each column
segment. For column C2-1, this force is
f
C21
= F
C21
i = 2
3
f
C21
(6)
Fig. 2. Components used in live load reduction example.
Fig. 3. Description of applied live load to be used in
frame analysis.
2 ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION
A summary of typical forces used in this frames live load
calculations are provided in Tables 1(a) and 1(b). Figure 3
shows the net applied live load distribution. Table 1(c) shows
distributions obtained by calculating the forces for steps 1
and 3 by a three-dimensional linear elastic analysis of the
rigidly jointed system.
In all cases where factored load combinations are inves-
tigated, both the beam live loads and the compensating forces
should be multiplied by the appropriate live load factors.
SUMMARY
An approach for incorporating live load reduction provisions
within system analyses is presented. By determining an
appropriate applied live load, the resulting forces in both
the beams and the columns will include the ASCE 7-88 live
load reduction provisions. In applying this live load, any dis-
placements calculated by a structural analysis will be con-
sistent with the reduced internal member force distribution.
Joint equilibrium will be maintained. Because the procedure
does not rely on applying the principle of superposition, it
may be used with either linear or nonlinear structural
analyses.
The concept of compensating forces has been illustrated
by applying them at beam-to-column intersections only. The
same idea can be extended to accommodate any desired
degree of modeling of interior floor framing.
ACKNOWLEDGMENTS
This research was supported by the National Science Foun-
dation under Grant Number MSM-8608803, the American
Institute of Steel Construction, and the School of Civil and
Environmental Engineering at Cornell University. The
authors wish to thank Dr. Jerome F. Hajjar of Skidmore,
Owings and Merrill for his comments and suggestions.
REFERENCES
1. American Society of Civil Engineers Minimum Design
Loads for Buildings and Other Structures, ASCE 7-88,
American Society of Civil Engineers, New York, 1990
(formally, American National Standard Minimum Design
Loads for Buildings and Other Structures, ANSI A58.1,
American National Standards Institute, New York, March
1982).
2. Parikh, B. P., Elastic-Plastic Analysis and Design of
Unbraced Multi-Story Steel Frames, Ph.D. Thesis,
Lehigh University, June 1966.
3. Pesquera, C. I., Integrated Analysis and Design of Steel
Frames with Interactive Computer Graphics, Ph.D. The-
sis, Cornell University, Ithaca, New York, March 1984.
4. White, D. W. and Hajjar, J. F., Application of Second-
Order Elastic Analysis in DesignResearch to Practice,
AISC, National Steel Construction Conference, Kansas
City, Missouri, March 1990, pp. 11.111.22.
5. Ziemian, R. D., Advanced Methods of Inelastic Analy-
sis in the Limit States Design of Steel Structures, Ph.D.
Thesis, Cornell University, Ithaca, New York, August
1990.
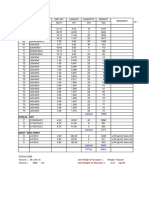
Table 1.
Example of Reduced Live Load Calculations
(a) Beams
Member
Length
ft
Tributary
Area
ft
2
, Unreduced
Uniform L.L.
k/ft
Influence
Area
ft
2
Permissible
Reduction
Factor
, Reduced
Uniform L.L.
k/ft
B1-i, B2-i
B9-i
for i = 1 to 3
30
20
200
200
0.500
0.750
600
1200
0.862
0.683
0.431
0.512
(b) Columns with Force Distribution Estimated
Member
F, Unreduced
Axial L.L.
kips
Influence
Area
ft
2
Permissible
Reduction
Factor
F , reduced
Axial L.L.
kips
F , Reduced
Axial L.L.
kips
F = = F F
kips
f, Compensating
Force (Upward)
kips
C2-1
C2-2
C2-3
67.50
45.00
22.50
3600
2400
1200
0.500
0.556
0.683
33.75
25.02
15.37
54.15
36.10
18.05
20.40
11.08
2.68
9.32
8.40
2.68
(c) Columns with Force Distribution Determined by Linear Elastic Analysis
Member
F, Unreduced
Axial L.L.
kips
Influence
Area
ft
2
Permissible
Reduction
Factor
F , reduced
Axial L.L.
kips
F , Reduced
Axial L.L.
kips
F = = F F
kips
f, Compensating
Force (Upward)
kips
C2-1
C2-2
C2-3
69.48
46.45
23.37
3600
2400
1200
0.500
0.556
0.683
34.74
25.83
15.96
55.71
37.21
18.78
20.97
11.38
2.82
9.59
8.56
2.82
FIRST QUARTER / 1992 3
ABSTRACT
The use of substandard and mismatched bolts continues to
be a major concern to bridge owners in the United States.
Based on FHWA-sponsored research at the University of
Texas, supplemental specifications were developed and issued
modifying fastener manufacturing, testing, and installation
procedures.
Nearly all bridge bolts are designed for dynamic loading.
They are designed to resist either tension forces and/or shear
forces. Fatigue concerns govern bolts designed for cyclic ten-
sion forces. Cyclic shear forces require slip critical connec-
tions. Both loading conditions require bolts to be installed
to a minimum preload.
The FHWA recommendations were developed in order to
assure the ability of bolts to achieve this preload. Minimum
nut strength is increased, maximum bolt strength is reduced,
thread fit tolerance is reduced, additional rotational-capacity
testing is required, and additional testing, documentation,
handling and shipping requirements are imposed. The ration-
ale for these new FHWA provisions are discussed.
Finally, slip critical joints depend upon friction between
faying surfaces to develop strength. Values of slip resistance
or coefficient of friction for various paints and coatings must
be determined by testing. Bolt design parameters depend
upon minimum values of tested coatings.
INTRODUCTION
The behavior of bolted joints depends on a large number of
variables many of which are rather difficult to predict.
Depending on the usage, and concerns for protection from
the environment, different materials and acceptance require-
ments have been specified by the users depending on their
current knowledge. In spite of over 30 years of experience
with high-strength fasteners, there continue to be problems
in ensuring that fasteners are of adequate quality and are
installed properly. There are concerns that bolted connec-
tions in many bridges built over the past 10 years or so might
not meet acceptance criteria if they were subjected to test
requirements of today.
These concerns can be eliminated when fasteners are
manufactured to code requirements and subsequent quality
control testing is done by the fastener manufacturers, accept-
able installation procedures are practiced by the installers,
followed by a reliable quality assurance (QA) and traceabil-
ity program by the owner.
FASTENER REQUIREMENTS AND RATIONALE
Researchers, owners, code writing organizations, and the fas-
tener industry have been attempting to constantly improve
the quality of fasteners and fastener installation practices to
produce a better end product. To ensure that only those
fasteners which meet the minimum quality standards are
used, the Federal Highway Administration (FHWA) initiated
an extensive experimental research program with the Depart-
ment of Civil Engineering of the University of Texas at Austin
to evaluate the performance of both black and galvanized
high-strength bolts for steel bridge structures. The study was
done using ASTM A325 hot dipped or mechanically gal-
vanized bolts and A325/A490 black bolts. Only normal size
fasteners commonly used in steel bridge superstructures were
tested. Research findings were reported in the FHWA pub-
lication FHWA/RD-87/088 High-Strength Bolts for
Bridges. Recognizing the need to underscore the various
recommendations made in the report and to implement them,
the recommendations were compiled, modified in consulta-
tion with the researcher and the fastener industry, and later
distributed to the field offices via an FHWA memorandum.
The objective of the FHWA memorandum was to allow the
AASHTO (American Association of State Highway and
Transportation Officials) bridge owners to incorporate these
high-strength bolt specifications in the state standard speci-
fications or contract documents without duplicating the effort
of sorting out the recommendations from the report. A copy
of the FHWA supplemental specifications contained in the
memorandum is included in the appendix. The rationale
behind the pertinent specifications is discussed in this paper.
The supplemental specifications were written for AASHTO
M164 (ASTM A325) bolts but it is recognized that similar
specifications are needed for A490 bolts and other alternate
fasteners. The supplemental specifications for A325 bolts
were written first because those bolts are used most com-
monly for bolted connections of bridge members.
The following background information should be helpful
in understanding the rationale for the various requirements
in the memorandum.
Essentially, a clamping force is needed to prevent fatigue
High-Strength Bolts for Bridges
KRISHNA K. VERMA and FRED R. BECKMANN
Krishna K. Verma is welding engineer, Federal Highway Ad-
ministration, Washington, D.C.
Fred R. Beckmann is Director of Bridges, American Institute
of Steel Construction, Chicago, IL.
4 ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION
failure of bolts subjected to cyclic tension and to prevent slip
and increase fatigue strength in shear connections. Fatigue
failure of threaded fasteners is well known. It can be traced
to points of stress concentrations such as those locations
where there are abrupt geometric changes, a notch or a nick,
or locations where the material may have poor fracture
toughness. The torque applied to the fastener assembly is
not uniformly distributed over the engaged length because
fastener materials are not inelastic and there are manufac-
turing tolerances resulting in less than perfect matching of
bolt and nut threads over the engaged length. However, fail-
ure in threaded fasteners is often located at the washer face
of the nut, at the thread runout, or at the junction of the bolt
head and shank. This is primarily because of probable high
stress concentrations at these locations, although the aver-
age stress levels in the body of the bolt may remain well
below the endurance limit of the material. Furthermore,
cyclic external forces applied to the bolt can reduce the life
of the fasteners by fatigue.
As the torque is applied to the nut, a portion of it is resisted
by friction between the nut and the gripped material; the
remainder is resisted by friction at the thread interface result-
ing in torsional stresses in the bolt shank. The bolt is thus
subjected to a combined torque-tension stress condition. Load
deformation characteristics of bolts subject to direct tension
compared to torque-tension reveal that specimens subject to
torque-tension are less ductile
2
and have strength levels
reduced between five and 25 percent.
Clamping force is an important consideration if a bolted
joint must function as a slip resistant joint. In such a joint
the external load component parallel to the faying surface(s)
is resisted by the frictional resistance which is dependent on
the clamping force of the bolt and the coefficient of friction
at the faying surface. In a bearing type connection, slip is
allowed and movement stops as the material bears against
the bolt. In such joints the critical factors are the permissi-
ble bearing stress on the connection material, the axial stress
on the net section and the shear stress of the fastenersnot
the initial preload of the bolt. Comparative studies of bolts
subject to shear stresses under tension or compression show
that shear stress deformation characteristic of A325 bolts and
A490 bolts are similar; however, A490 bolts have a lesser
ability to deform than A325 bolts under similar conditions,
and the maximum shear stress experienced by A490 bolts
(of higher strength material) is greater than that in A325
bolts. The research also suggests that when the same type
of bolt (A325 or A490) is subjected to shear test in tension
or compression jigs, samples in tension jigs show lower shear
strength (a tension jig is preferred for testing shear strength
of bolts because it produces the lower range of the shear
value). Available data also demonstrate that the shear strength
of A325 or A490 bolts is approximately 62 percent of the
tensile strength. It is significant to note that unlike bolts sub-
ject to tensile loads, the clamping force has no significant
effect on the ultimate shear strength of the bolt. Thus, for
slip critical joints subjected to dynamic loads, it is apparent
that not only should initial preloads as high as practicable
be applied to fasteners, but it is also critical that the desired
preload is indeed in the bolt after it is installed.
Until 1985, the practice in North America had been to pro-
vide as high a preload as practical regardless of whether or
not the joint was slip critical and whether or not tensile forces
were applied. Though the apparent objective was to achieve
uniformity and simplicity in bolt installation, there were
inherent economic disadvantages in attempting to accurately
preload bolts where preloading was not even necessary. Since
the introduction of high-strength bolts the requirement has
been that high-strength fasteners in slip critical joints and
connections subject to direct tension or reversible loads need
to be preloaded to a predetermined level. Since 1985, snug
tightening has been permitted in many situations where it
is adequate in buildings for bearing type fasteners though
generally not used for bridges.
Obviously, an adequate preload is essential within certain
tolerances for dynamically loaded structures such as steel
bridges. Proper preloading of fasteners in such structures is
an important and critical task faced by bridge engineers and
inspectors. There are, however, numerous related problems
and issues and hence the need to specify adequate control.
Material specifications, e.g., ASTM Specifications,
AASHTO Materials Specifications and other specifications
provide necessary controls during the manufacturing pro-
cess. Installation of fasteners for bridges is addressed by
AASHTO, in Division II of the AASHTO Standard Speci-
fications for Highway Bridges. In addition, AASHTO bridge
owners may have their own special requirements and pre-
ferred practices.
The FHWA memorandum cited earlier supplements to
AASHTO Specifications based on the research findings
reported in Ref. 1, High-Strength Bolts for Bridges. It
should be understood that except for the proposed sup-
plemental specifications, other ASTM Specifications and
AASHTO Material Specifications remain valid. The memo-
randum amends or revises AASHTO Material Specifications
but does not replace them. These modifications also ensure
the strength of the bolts, nuts, and washers during manufac-
turing and cover issues pertaining to testing of fasteners and
fastener assemblies, needed documentation, shipping, and
installation at the job site. As an example, the FHWA sup-
plemental specifications take some exceptions to AASHTO
Material Specifications for tensile strength and hardness
requirements and modify related specifications. Some of
these are:
1. A325 bolts are available as Type 1, 2 and 3 fasteners.
These require a minimum strength of 105 ksi for 1
1
8
-in.
to 1
1
2
-in. diameter bolts and 120 ksi minimum strength
for
1
2
-in. to 1-in. diameter bolts. Though A325 bolt
FIRST QUARTER / 1992 5
specifications provide a range of hardness, the upper
bound of tensile strength is not included in the ASTM
or AASHTO Material Specifications. The hardness can
generally be converted to an equivalent tensile strength
using conversion tables such as those in ASTM Speci-
fications (A370) or other references. Current AASHTO
Material Specifications and ASTM Specifications
require matching nuts for A325 bolts. These include
heat treated nuts as well as non-heat treated nuts with
hardness values as low as 78 HRB (Hardness, Rock-
well B). Similarly, A490 bolts are available as Type 1,
2, and 3. These bolts have required material strength
ranges from 150 ksi to 170 ksi with matching nuts of
hardness greater than 24 Rc (Rockwell C) which is
much greater than 89 HRB. For A490 bolts non-heat
treated nuts are not permitted by either ASTM Speci-
fications or AASHTO Material Specifications. An
examination of these two specifications reveals an
inconsistency in fastener specifications. As noted
above, current specifications allow manufacturing A490
bolts with a minimum tensile strength 150 ksi and hard-
ness value of approximately 33 Rc, but these A490 bolts
are not permitted to be galvanized. However, using cur-
rent ASTM Specification or AASHTO Material Spec-
ifications, A325 bolts can be manufactured with hard-
ness as high as 35 Rc which is equivalent to 156 ksi
tensile strength, well into the A490 strength range. The
current AASHTO Material Specifications and ASTM
Specifications do allow galvanizing A325 (M164) bolts.
Thus comparing the two situations it does not seem log-
ical to allow galvanizing A325 bolts of 35 Rc hardness
when galvanizing A490 bolts of 33 Rc hardness is pro-
hibited. The FHWA supplemental specifications include
modified requirements to correct this inconsistency.
2. Thread stripping is controlled by (a) bolt and nut
strength and (b) fit of threads at the interface. Preven-
tion of stripping requires proper fit of bolt-nut assem-
blies and often requires that heat treated nuts be speci-
fied. Non-heat treated nuts with lower hardness values
have potential for nut stripping. In previous years,
AASHTO had been allowing the use of non-heat treated
nuts which could have a minimum hardness as low as
78 HRB. The FHWA supplemental specifications re-
quire that the minimum hardness of the nut should be
89 HRB to prevent possible stripping of nuts. The need
for this minimum hardness can be explained by Alex-
anders model
1
which was developed based on
experimental data. It is illustrated in Fig. 1.
Curves have been plotted for
7
8
-in. diameter bolts
of tensile strength 156 ksi (equivalent to 35 Rc hard-
ness). In Fig. 1, the ratio of the stripping strength of
nut (or stripping strength of bolt) to the tensile strength
of the bolt has been plotted against the nut strength.
The dotted horizontal line represents those assemblies
which have stripping strength equal to the tensile
strength of the bolt. Points on the curve which are below
this horizontal dotted line are subject to possible fail-
ure by thread stripping only. Those above the dotted
line will fail by tension in the bolt rather than strip-
ping of threads. From Fig. 1, it is evident that for those
assemblies which have nut strength greater than 87 ksi,
neither the bolts nor the nuts will strip since the corre-
sponding points lie above the horizontal dotted line.
Since 87 ksi tensile strength is approximately equiva-
lent to 89 HRB hardness, the FHWA supplemental
specification requires hardness of nuts not less than 89
HRB. On the abscissa in Fig. 1, nut strength and vari-
ous nut designations have been shown. These nut
representations indicate lowest permissible strength (or
hardness) as permitted by the current ASTM/AASHTO
Material Specifications. From this figure, it is possi-
ble to infer that heat treated nuts, 2H, DH, and DH3,
have minimum hardness well above 89 HRB, the sug-
gested minimum hardness to prevent nut stripping.
However, non-heat treated nuts, if manufactured with
minimum hardness as permitted by ASTM and
AASHTO Material Specifications, will be prone to nut
stripping. The suggested minimum hardness 89 HRB
is within the upper and the lower limits of hardness
permitted in those specifications. Nut stripping in non-
heat treated nuts can be prevented if such nuts are
manufactured to a hardness not less than 89 HRB.
A limited study
1
of comparable fasteners produced
in accordance with ASTM specifications using tradi-
Fig. 1. Effect of nut strength on bolt and nut stripping.
(Reproduced from Ref. 1.)
6 ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION
tional U.S. units of measurement with fasteners pro-
duced in accordance with ASTM specifications using
metric units of measurement seems to suggest that met-
ric fasteners with loose fit and minimum hardness of
89 HRB are less prone to stripping, whereas other
fasteners with tighter thread fit tolerances and mini-
mum hardness of 78 HRB are prone to stripping. The
study revealed that fasteners made using the metric
standard with slightly greater nut strength (approxi-
mately two percent), as evidenced by hardness num-
bers, are more forgiving, even with a loose fit. It is
important to recognize that failures resulting from
thread stripping must be avoided because such failures
could go undetected during the service life of the
bridge, resulting in possible failure of bridge members
and related consequences to the travelling public. How-
ever, it may be noted that even though the minimum
hardness requirement of 89 HRB for non-heat treated
nuts 2, C, C3 and D is specified in the FHWA sup-
plemental specifications, stripping failure can still occur
if there are only a few threads in the grip. For that rea-
son it is desirable to ensure that a minimum three to
five complete threads are in the grip. Bolts with more
threads in the grip have greater ductility and lower
apparent tensile strength.
3. Some of the test requirements for bolts, nuts, washers
and fastener assemblies have also been modified by the
FHWA supplemental specifications. Proof load testing
of bolts and nuts is required. Proof load is the tension
applied load which the fasteners must resist without
evidence of any permanent deformation. This test pro-
vides a check on the yielding behavior of the material
since the elongation is measured during testing. If gal-
vanized fasteners are used, proof load testing is required
after galvanizing. Wedge testing of bolts and hardness
testing of washers is also required, but in the case of
galvanized fasteners these tests are required after gal-
vanizing. For galvanized fasteners, zinc thickness meas-
urements are also needed. Zinc thickness measurements
on bolts and nuts are important for proper fit and to
control overtapping. Performance capability of these
fasteners together in an assembly is checked via
rotational-capacity testing for either black or galvanized
units. Rotational-capacity testing is required prior to
shipping as well as at the job site. Job site testing is
important but only a minimal amount is needed.
Rotational-capacity testing prior to shipping can be
done either by the manufacturer or the distributor, as
appropriate.
The purpose of the rotational-capacity testing is to
verify the torque tension relationship in order to ensure
(a) efficiency of lubrication, (b) adequate installation
ductility and (c) adequate resistance to stripping. Essen-
tially the rotational-capacity test requires measurement
of the bolt tension at the specified minimum rotation
(twice the amount of the required installation rotation)
from a snug tight condition; and also torque tension
values in a Skidmore-Wilhelm Calibrator, at any point
above installation rotation, to satisfy the following
requirement:
Torque (foot-pounds) 0.25
P (bolt tension-pounds) D (bolt dia. feet)
The FHWA supplemental specification does not allow
rotational-capacity testing of long bolts in a steel joint
as currently permitted by both ASTM Specifications
and ASHTO Material Specifications. Testing in a steel
joint does not allow direct measurements of bolt ten-
sion during rotational-capacity testing. A Skidmore-
Wilhelm Calibrator or similar device is required by the
FHWA supplemental specification because such a
device allows direct measurement of bolt tension as the
rotational-capacity test is performed. The torque-
tension relationship curves for these two situations have
different slopes at the lower levels of bolt tensioning,
but then the curves level out, merge and form a hori-
zontal plateau prior to sloping downwards as the bolt
tension is increased. Because the values of tension and
torque from this somewhat horizontal portion of the
curve are used for acceptance or rejection of the
rotational-capacity test, and for determination of the
maximum tension in the bolt, the values obtained using
a steel joint or a Skidmore-Wilhelm Calibrator will be
the same for all practical purposes.
In the case of short bolts which cannot be installed in
a Skidmore-Wilhelm Calibrator, the FHWA sup-
plemental specification does not require measurement
of the actual maximum tension for the turn test. Antic-
ipated turn test tension as tabulated in the FHWA sup-
plemental specifications is used to calculate torque
using the equation noted above. This calculated torque
can then be compared with the measured torque.
4. In addition to job site rotational-capacity tests, calibra-
tion tests are also required. This is because for a given
tension there can be large variation in bolt torque as
measured in the laboratory prior to shipping to the job
site and that obtained in the field. Hence, it is required
that calibration tests be performed after fasteners are
received at the job site using a Skidmore-Wilhelm
Calibrator or an acceptable equivalent tension meas-
uring device to ensure compliance with the minimum
installation pretension.
SLIP RESISTANCE OF FAYING SURFACES
As previously noted, the intent of the FHWA supplemental
specification is to ensure that the washer/nut/bolt combina-
tion functions as a matched unit. It is appropriate to con-
sider the influence of surface preparations and coatings on
FIRST QUARTER / 1992 7
the faying surfaces in achieving slip critical joints using high-
strength fastener assemblies.
The design of a bolted connection may be governed by
bearing on the connected material, shear in the shank, or
thread plane of the fastener or the slip resistance of the con-
tact surfaces of the connection. In nearly all bridge design,
because of dynamic loading, slip resistance of the joint is
the critical criterion. Bolts are seldom used in tension in
bridge structures.
Slip resistance of the contact of faying surfaces is a func-
tion of the surface condition. The design specification recog-
nizes three classes of surface conditions:
Class AClean mill scale surfaces and surfaces coated
with a Class A coating.
Class BBlasted surfaces and surfaces coated with a
Class B coating.
Class CGalvanized and roughened surfaces.
The most economical joint design generally occurs using
Class B surfaces. These are either uncoated blasted surfaces
or surfaces coated with a Class B coating. Where the struc-
ture is to be unpainted, it makes sense to specify uncoated
blasted surfaces. Where the structure is to be painted, the
structure should be designed with painted faying surfaces
using Class B coatings.
Coatings are classified as Class A or B based on slip coeffi-
cient testing performed in accordance with Appendix A of
the Specification for Structural Joints Using ASTM A325
or A490 Bolts. The essential variables for the test are paint
formulation, cure time, dry film thickness, and thinner used.
Actual coating application procedures that deviate from the
essential variables beyond certain limits require retesting.
Because there are many combinations of essential variables,
choosing the proper values when performing the test is very
important.
Part of the test lasts 42 days; to retest is costly and can
delay a project.
As of the summer of 1990, very little testing of candidate
Class B coatings has been performed. Since bridges are cur-
rently being designed using the Class B coatings, it is impor-
tant that testing proceed at a faster rate. Steps are currently
underway to increase the number of paints that have been
tested. Hopefully, by the spring of 1991, the situation rela-
tive to the testing will improve and designers will be using
the higher slip values with the full knowledge that there are
an adequate number of paints available to meet the need.
REFERENCES
1. J. A. Yura, K. H. Frank, D. Polyzois. High-Strength Bolts
for Bridges. Publication No. FHWA/RD-87/088. U.S.
Department of Transportation. Federal Highway Adminis-
tration.
2. G. L. Kulak, J. W. Fisher, and J. H. A. Struik. Guide to
Design Criteria for Bolted and Riveted Joints. A Wiley-
Interscience Publication. John Wiley and Sons, New
York.
3. J. H. Bickford. An Introduction to the Design and
Behavior of Bolted Joints. Marcel Deckker Inc., New
York.
4. J. A. MacDonald. For Want of Bolt. Civil Engineering,
October 1988.
5. FHWA Memorandum. High-Strength Bolts, November
1989.
APPENDIX
November 1989
SUPPLEMENTAL CONTRACT SPECIFICATIONS
FOR PROJECTS WITH AASHTO M164 (ASTM A325)
HIGH-STRENGTH BOLTS
A. Scope
A1. All AASHTO M164 (ASTM A325) high-strength
bolts, nuts and washers shall be furnished in accor-
dance with the appropriate AASHTO Materials
Specifications as amended and revised herein.
Additional requirements for field or shop instal-
lation of AASHTO M164 (ASTM A325) high-
strength bolts are also included. These additional
requirements supplement AASHTO Division II,
Section 10.
B. Specifications
B1. All bolts shall meet the requirements of AASHTO
M164 (ASTM A325) and these revisions.
B2. All nuts shall meet the requirements of AASHTO
M292 (ASTM A194) as applicable or AASHTO
M291 (ASTM A563) and these revisions.
B3. All washers shall meet the requirements of
AASHTO M293 (ASTM F436) and these revisions.
C. Manufacturing
C1. Bolts
1. Hardness for bolt diameters
1
2
-in. to 1-in. inclu-
sive shall be as noted below:
Hardness Number
Bolt Size, In. Brinell Rockwell C
Min. Max. Min. Max.
1
2
- to 1-in. 248 311 24 33
C2. Nuts
1. Nuts to be galvanized (hot dip or mechanically
galvanized) shall be heat treated grade 2H, DH,
or DH3.
2. Plain (ungalvanized) nuts shall be grades 2, C,
D, or C3 with a minimum Rockwell hardness
of 89 HRB (or Brinell hardness 180 HB), or heat
treated grades 2H, DH, or DH3. (The hardness
requirements for grades 2, C, D, and C3 exceed
the current AASHTO/ASTM requirements.)
8 ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION
3. Nuts that are to be galvanized shall be tapped
oversize the minimum amount required for
proper assembly. The amount of overtap in the
nut shall be such that the nut will assemble freely
on the bolt in the coated condition and shall meet
the mechanical requirements of AASHTO M291
(ASTM A563) and the rotational-capacity test
herein (the overtapping requirements of
AASHTO M291 (ASTM A563) paragraph 7.4
shall be considered maximum values instead of
minimum, as currently shown).
4. Galvanized nuts shall be lubricated with a lubri-
cant containing a dye of any color that contrasts
with the color of the galvanizing.
C3. MarkingAll bolts, nuts and washers shall be
marked in accordance with the appropriate
AASHTO/ASTM Specifications.
D. Testing
D1. Bolts
1. Proof load tests (ASTM F606 Method 1) are
required. Minimum frequency of tests shall be
as specified in AASHTO M164 (ASTM A325)
paragraph 9.2.4.
2. Wedge tests on full size bolts (ASTM F606 para-
graph 3.5) are required. If bolts are to be gal-
vanized, tests shall be performed after galvaniz-
ing. Minimum frequency of tests shall be as
specified in AASHTO M164 (ASTM A325)
paragraph 9.2.4.
3. If galvanized bolts are supplied, the thickness of
the zinc coating shall be measured. Measure-
ments shall be taken on the wrench flats or top
of bolt head.
D2. Nuts
1. Proof load tests (ASTM F606 paragraph 4.2) are
required. Minimum frequency of tests shall be
as specified in AASHTO M291 (ASTM A563)
paragraph 9.3 or AASHTO M292 (ASTM A194)
paragraph 7.1.2.1. If nuts are to be galvanized,
tests shall be performed after galvanizing, over-
tapping and lubricating.
2. If galvanized nuts are supplied, the thickness of
the zinc coating shall be measured. Measure-
ments shall be taken on the wrench flats.
D3. Washers
1. If galvanized washers are supplied, hardness
testing shall be performed after galvanizing.
(Coating shall be removed prior to taking hard-
ness measurements).
2. If galvanized washers are supplied, the thickness
of the zinc coating shall be measured.
D4. Assemblies
1. Rotational-capacity tests are required and shall
be performed on all black or galvanized (after
galvanizing) bolt, nut and washer assemblies by
the manufacturer or distributor prior to shipping.
Washers are required as part of the test even
though they may not be required as part of the
installation procedure.
The following shall apply:
a. Except as modified herein, the rotational-
capacity test shall be performed in accor-
dance with the requirements of AASHTO
M164 (ASTM A325).
b. Each combination of bolt production lot, nut
lot and washer lot shall be tested as an assem-
bly. Where washers are not required by the
installation procedures, they need not be
included in the lot identification.
c. A rotational-capacity lot number shall be
assigned to each combination of lots tested.
d. The minimum frequency of testing shall be
two assemblies per rotational-capacity lot.
e. The bolt, nut and washer assembly shall be
assembled in a Skidmore-Wilhelm Calibra-
tor or an acceptable equivalent device (note:
this requirement supersedes the current
AASHTO M164 (ASTM A325) requirement
that the test be performed in a steel joint).
For short bolts which are too short to be
assembled in the Skidmore-Wilhelm Calibra-
tor, see Section D4.1i.
f. The minimum rotation, from a snug tight
condition (10% of the specified proof load),
shall be:
240 (
2
3
turn) for bolt lengths < 4 diameters
360 (1 turn) for bolt lengths > 4 diameters
and < 8 diameters
480 (1
1
3
turn) for bolt lengths > 8 diameters
(Note that these values differ from the
AASHTO M164 Table 8/ASTM A325 Table
6 Specifications.)
g. The tension reached at the above rotation
shall be equal to or greater than 1.15 times
the required installation tension. The instal-
lation tension and the tension for the turn test
are shown below:
Diameter (in.)
1
2
5
8
3
4
7
8
1 1
1
8
1
1
4
1
3
8
1
1
2
Req. installation
tension (kips) 12 19 28 39 51 56 71 85 103
Turn test
tension (kips) 14 22 32 45 59 64 82 98 118
FIRST QUARTER / 1992 9
h. After the required installation tension listed
above has been exceeded, one reading of
tension and torque shall be taken and
recorded. The torque value shall conform to
the following:
Torque 0.25 PD
Where
Torque = measured torque (foot-pounds)
P = measured bolt tension (pounds)
D = bolt diameter (feet).
i. Bolts that are too short to test in a Skidmore-
Wilhelm Calibrator may be tested in a steel
joint. The tension requirement of Section
D4.1g need not apply. The maximum torque
requirement of Section D4.1h shall be com-
puted using a value of P equal to the turn test
tension shown in the table in Section D4.1g.
D5. Reporting
1. The results of all tests (including zinc coating
thickness) required herein and in the appropri-
ate AASHTO specifications shall be recorded on
the appropriate document.
2. Location where tests are performed and date of
tests shall be reported on the appropriate
document.
D6. Witnessing
1. The tests need not be witnessed by an inspec-
tion agency; however, the manufacturer or dis-
tributor that performs the tests shall certify that
the results recorded are accurate.
E. Documentation
E1. Mill Test Report(s) (MTR)
1. MTR shall be furnished for all mill steel used
in the manufacture of the bolts, nuts, or washers.
2. MTR shall indicate the place where the mate-
rial was melted and manufactured.
E2. Manufacturer Certified Test Report(s) (MCTR)
1. The manufacturer of the bolts, nuts and washers
shall furnish test reports (MCTR) for the item
furnished.
2. Each MCTR shall show the relevant informa-
tion required in accordance with Section D5.
3. The manufacturer performing the rotational-
capacity test shall include on the MCTR:
a. The lot number of each of the items tested.
b. The rotational-capacity lot number as
required in Section D4.1c.
c. The results of the tests required in Section D4.
d. The pertinent information required in Sec-
tion D5.2.
e. A statement that MCTR for the items are in
conformance to this specification and the
appropriate AASHTO specifications.
f. The location where the bolt assembly com-
ponents were manufactured.
E3. Distributor Certified Test Report(s) (DCTR)
1. The DCTR shall include MCTR above for the
various bolt assembly components.
2. The rotational-capacity test may be performed
by a distributor (in lieu of a manufacturer) and
reported on the DCTR.
3. The DCTR shall show the results of the tests
required in Section D4.
4. The DCTR shall also show the pertinent infor-
mation required in Section D5.2.
5. The DCTR shall show the rotational-capacity lot
number as required in Section D4.1c.
6. The DCTR shall certify that the MCTR are in
conformance to this specification and the
appropriate AASHTO specifications.
F. Shipping
F1. Bolts, nuts and washers (where required) from each
rotational-capacity lot shall be shipped in the same
container. If there is only one production lot num-
ber for each size of nut and washer, the nuts and
washers may be shipped in separate containers. Each
container shall be permanently marked with the
rotational-capacity lot number such that identifica-
tion will be possible at any stage prior to installation.
F2. The appropriate MTR, MCTR or DCTR shall be
supplied to the contractor or owner as required by
the Contract Documents.
G. Installation
The following requirements for installation apply in addi-
tion to the specifications in AASHTO Division II, Sec-
tion 10 when high-strength bolts are installed in the field
or shop.
G1. Bolts shall be installed in accordance with AASHTO
Division II Article 10.17.4. During installation,
regardless of the tightening method used, particu-
lar care should be exercised so that the snug tight
condition as defined in Article 10.17.4 is achieved.
G2. The rotational-capacity test described in Section D4
above shall be performed on each rotational-
capacity lot prior to the start of bolt installation.
Hardened steel washers are required as part of the
test although they may not be required in the actual
installation procedures.
G3. A Skidmore-Wilhelm Calibrator or an acceptable
equivalent tension measuring device shall be
required at each job site during erection. Periodic
testing (at least once each working day when the
calibrated wrench method is used) shall be per-
formed to assure compliance with the installation
10 ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION
test procedures required in AASHTO Division II,
Article 10.17.4.1 for Turn-of-Nut Tightening,
Calibrated Wrench Tightening, Installation of Alter-
nate Design Bolts and Direct Tension Indicator
Tightening. Bolts that are too short for the
Skidmore-Wilhelm Calibrator may be tested using
direct tension indicators (DTIs). The DTIs must be
calibrated in the Skidmore-Wilhelm Calibrator using
longer bolts.
G4. Lubrication
1. Galvanized nuts shall be checked to verify that
a visible lubricant is on the threads.
2. Black bolts shall be oily to the touch when
delivered and installed.
3. Weathered or rusted bolts or nuts not satisfying
the requirements of G2 or G3 above shall be
cleaned and relubricated prior to installation.
Recleaned or relubricated bolt, nut and washer
assemblies shall be retested in accordance with
G2 above prior to installation.
G5. Bolt, nut and washer (when required) combinations
as installed shall be from the same rotational-
capacity lot.
FIRST QUARTER / 1992 11
INTRODUCTION
Recent studies have pointed to the behavior of beam-column
connections as having an important effect on stiffness and
strength of steel frames,
1,2
and considerable work has been
done to develop analysis methods intended to include not
only member, but also connection behavior.
3,4
Design methods as outlined in the AISC Allowable
Stress
5
and LRFD
6
Specifications authorize inclusion of
connection effects under the heading of Type 3 in the
former, and Partially Restrained (PR) in the latter.
In both analysis and design including connection effects,
connection behavior must be known. For typical beam-to-
column connections of building frames, voluminous, if frag-
mentary, data are available.
7,8,9
Attempts at rational predic-
tion of connection behavior have been less than successful,
but empirical expressions, based on test data, of the relation
between the applied moment M and the resulting connec-
tion rotation are available. Among these, the most com-
monly used are those of Frye and Morris,
10
shown in Fig. 1.
The deterministic moment-rotation curves shown in Fig. 1,
and others similar, are often based on one single test, and
do not account for the scatter which may inevitably be
expected of connection behavior, specially if field-bolted.
Little is available in the way of replicate tests which might
provide a database necessary for statistical prediction of con-
nection behavior. Until such information about reliability of
connection behavior is provided, its inclusion in design or
analysis rests, at best, on a shaky basis.
This paper reports a study the aim of which is to provide a
statistical database for the purpose of establishing the
degree of reliability of strength and stiffness for one con-
nection type. To this end, nominally identical framing con-
nection specimens from different sources were tested under
identical conditions. The individual moment-rotation curves
obtained from these tests form the database for probabil-
istic determination of the reliability with which specified
behavior of these connections can be expected.
TEST PROGRAM
Specimens
Six fabricators volunteered to provide double-web angle con-
nection specimens fabricated according to the drawing and
specifications shown in Fig. 2. Two identical specimens were
provided with untensioned bearing-type bolts (B-bolts), and
two with friction-type bolts (F-bolts) tensioned according to
shop practice of the individual fabricator, for a total of 12
specimens for each bolt type. Since each specimen contained
two web-angle connections, we had in fact a sample of 24
Reliability of Rotational Behavior
of Framing Connections
THOMAS R. RAUSCHER and KURT H. GERSTLE
Thomas R. Rauscher is a master degree candidate in the
Civil, Environmental and Architectural Engineering Depart-
ment at the University of Colorado, Boulder, CO.
Kurt H. Gerstle is a professor in the Civil, Environmental and
Architectural Engineering Department at the University of
Colorado, Boulder, CO.
Fig. 2. Test specimen.
Fig. 1. Connection moment-rotation curves.
10
12 ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION
of each connection.
In addition, one fabricator supplied us with a set of six
specimens with
3
8
-in. thick web angles with F-bolts, attached
to previously tested members. Table 1 summarizes the test
specimens. This program gave us the opportunity to assess
the following factors:
Scatter of connection behavior
Comparison of B-bolt versus F-bolt behavior
Influence of connection stiffness
Effect of applied load history.
The ratio of moment to shear transmitted by the connec-
tion might have considerable influence on its behavior, but
was not a variable in our study. It was held constant at the
value of shear span shown in Fig. 2.
It should be noted that these double web-angle connec-
tions are commonly used as shear connections. Our discus-
sion only concerns their rotational characteristics and there-
fore none of the conclusions should be interpreted as
addressing their reliability in transmitting shear. We are here
only concerned with the way in which they can be expected
to rotate under applied moment.
The test configuration used in this study, consisting of
beams and column stub as shown in Figs. 2 and 3, should
not be construed as suggesting that web angles should be used
to provide lateral resistance for unbraced frames. This speci-
men type was used here only to provide a simple connection
test setup.
Test Method and Instrumentation
The specimens were mounted as shown in Fig. 3 in a 1000 kip
MTS universal testing machine with load and displacement
control. Instrumentation consisted of rotation meters and
strain-gaged links to determine applied moments. The former,
also shown in Fig. 3, consisted of an aluminum frame mounted
on the beam, with linear variable differential transducers
(LVDTs) bearing against the column flange. Each link support
shown in Fig. 3 was instrumented for measurement of reac-
tions in order to determine the connection moment.
Test Procedure
All tests were carried out under load control. Two types of
load history were applied: A cyclic regime (C-Type) con-
sisting of three cyclic reversals each up to moments of 80,
160, and 240 kip-inches for Test Series 1 and 2, and 160,
320, and 480 kip-inches for Series 3, followed by load
increase up to a rotation of about 0.06 radians which would
entail contact between beam and column flanges. For com-
parison, some of the specimens were subjected to a mono-
tonic load increase (M-Type) up to maximum connection
rotation.
During tests, data were collected by a ten-channel data
acquisition system at specified time intervals, and signifi-
cant events were recorded. In some tests, the shock caused
by sudden bolt slip was sufficient to cause displacement of
the LVDTs; corrections were made to the readings in such
cases.
TEST RESULTS
All test results will be presented in the form of monotoni-
cally increasing moment-rotation curves. These were
obtained from the cyclic tests by drawing envelope, or spline,
curves circumscribing the cyclic response. Comparison with
curves from monotonic tests, described in greater detail in
Ref. 11, was in general good.
Test results will be described separately for the different
series specified in Table 1.
Table 1.
Test Program
Test
Series
No. of
Fabricators
Connection
Type
No. of
Specimens
No. of
Connections
Angle
Thickness
1 6 B-Bolt 12 24
1
4
2 6 F-Bolt 12 24
1
4
3 1 F-Bolt 6 12
3
8
Fig. 3. Test setup.
FIRST QUARTER / 1992 13
Series 1
Figure 4 shows monotonic moment-rotation curves obtained
from 24 connections in 12 specimens obtained from six dif-
ferent fabricators. As might be expected of connections with
non-tensioned bolts of random location within
1
16
-in. over-
size holes, the range of rotational behavior is vast. These
results are sufficiently unpredictable that no reliance what-
ever can be placed on the rotational resistance of such web-
angle connections with bearing bolts. No further reference
will be made to the results of Test Series 1.
Series 2
Moment-rotation curves from 22 connections of 11 speci-
mens of Series 2, obtained either from monotonic, or as enve-
lope curves from cyclic tests, are shown in Fig. 5. Although
showing considerable variation, a systematic random pattern
is seen here for both stiffness and strength. Non-linearity
is mainly due to yielding of the outstanding angle legs, and
bolt slip occurs only under rotations well in excess of admis-
sible values.
Series 3
The 12 moment-rotation curves for these
3
8
-in. web angle
connections furnished by one fabricator are shown in Fig. 6,
indicating consistency in the initial stiffness, but considera-
ble scatter in the occurrence of bolt slip which accounted
for the onset of softening of these connections.
Descriptive Parameters of Connection Response
The parameters used to describe the connection response in
the statistical analysis which follows were the secant modu-
lus K
sec
, the elastic limit moment M
el
, and the moment
under permissible rotation M
s
, as shown in Fig. 7.
The secant modulus K
sec
was based on the moment cor-
responding to a rotation of 0.002 radians, well within the elas-
tic range. M
el
was obtained visually as the moment corre-
sponding to the onset of softening of the M- curve. M
s
was
the moment corresponding to the end rotation of a uniformly
loaded simple beam under allowable midspan deflection
L/360, computed as 0.009 radians.
Tables 2 and 3 show the values of these parameters for
the right and left connection of each of the 12 specimens
of Series 2, and of the six specimens of Series 3. In these
tables, fabricator, test number, and loading type, parameter
values, and tension control are shown. These values furnish
the database for the statistical study of the next section.
STATISTICAL ANALYSIS
The purpose of our study is to assess the reliability with
which strength and stiffness of these web angle connections
can be predicted. To this end, we will subject the strength
parameters M
el
and the stiffness parameter K
sec
, defined in
Fig. 7, to statistical analysis with the aim of predicting their
minimum values which may be expected with specified prob-
ability, or confidence level. In addition, we will try to extract
Fig. 4. Bearing-type bolt connection response. Fig. 5. Friction-type connection response, Series 2.
14 ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION
information about systematic differences between products
of different fabricators in order to obtain insight into prob-
lems of quality control.
Statistical Methods
The value of any characteristic will vary among the speci-
mens tested. The total of these specimens is called the sam-
ple. The individual values can be plotted in the form of a
histogram. We assume that this histogram can be matched
under increasing sample size by a continuous bell-shaped
curve containing an area of value unity, as shown in Fig. 8,
representing a normal distribution. This curve displays the
character of the population of an infinite number of such
specimens, of which the sample is assumed to be a part. The
shape of this curve can be defined by just two parameters,
the mean X and the standard deviation S, defined in Fig. 8.
The coefficient of variation S/X indicates the degree of scat-
ter of results among nominally identical specimens.
The probability P of exceeding any particular value of the
parameter x is given by the area under the bell curve (shown
shaded in Fig. 8) which is to the right of that value, and which
can range from zero to unity.
The probability P can be found for a distribution with given
X and S for any value of x by integration, or from available
tables.
12
In this way, we will determine the minimum
strength and stiffness which can be expected at a specified
level of confidencesay, 95 times out of the next 100 speci-
mens, as will be assumed in what follows.
The methods just described depend on the premise that
all specimens belong to the same population. However, the
techniques of different fabricators could be so different that
their products might not belong to one population. Such con-
ditions are determined by an analysis of variance
(ANOVA).
12
An occurrence of this type will be discussed
below in connection with the stiffnesses of Series 2.
These techniques were applied to the test data in the
following sequence: the strengths M
el
and M
s
, and the
stiffness K
sec
of Series 2 and 3 were first subjected to an
analysis of variance to determine the likelihood of their
belonging to one or more populations to within the 95
percent level of confidence, using the F-Test described in
Ref. 12.
For each population, the values X and S of the normal dis-
tribution were computed, and the minimum value of each
parameter which might be expected within 95 percent con-
fidence level was calculated.
Table 2.
Sample Data for Series 2
Fabricator
Test
No.
Loading
Type
Ksec (kip-in./radian) Mel (kip-in.) Ms (kip-in.)
Tension Control Method os rs is rs is rs
1 1
15
C
C
30,000
46,500
33,000
52,000
168
100
182
167
183
110
200
185
Calibrated wrench
Specified tension
2 11
14
C
M
80,000
59,500
72,500
39,500
175
160
240
218
172
200
212
220
not available
3 23
24
C
M
69,000
75,000
74,000
66,000
140
150
179
195
135
133
179
195
Twist-off
4 13
8
C
M
40,000
50,000
168
200
210
225
Turn-of-nut
(no data recorded)
5 3
4
M
C
35,000
37,000
34,000
32,500
120
140
135
142
172
155
175
160
Twist-off
6 6
16
M
M
47,500
24,242
35,000
25,806
175
130
185
165
150
161
118
183
Twist-off
Table 3.
Sample Data Test Series 3
Fabricator
Test
No.
Loading
Type
Ksec (kip-in./radian) Mel (kip-in.) Ms (kip-in.)
Tension Control Method
is rs is rs is rs
3
25
26
27
28
29
30
M
C
C
M
C
M
95,000
135,000
89,000
95,000
105,000
99,000
115,000
89,000
112,500
115,000
130,000
100,000
338
265
395
265
360
370
338
270
350
230
325
365
345
280
360
243
370
370
345
280
340
280
335
378
Twist-off
FIRST QUARTER / 1992 15
Series 2
Strength
The strengths M
el
and M
s
, defined in Fig. 7, were subjected
to the statistical treatment outlined, and the results are sum-
marized in Table 4. An ANOVA showed to within a 95 per-
cent confidence level that the strength of all 22 specimens
belonged to one population, whose characteristic values X
and S are shown in Table 4, and that one might expect 95
out of the next 100 specimens to have strengths in excess
of M
el
= 89 kip-inches and M
s
= 99 kip-inches.
Stiffness
The observed stiffnesses K
sec
listed in Table 2 showed a
great deal of scatter, indicated by the coefficient of varia-
tion shown in Table 4 and the dashed curve of Fig. 9. The
ANOVA showed two distinct populations: Population A, con-
sisting of 14 specimens from Fabricators 1, 4, 5, and 6, and
Population B, of eight specimens from Fabricators 2 and 3.
The statistical characteristics of each of these populations,
as well as those of the composite sample of 22 specimens,
are presented in Fig. 9 and Table 5. These results show that
of the next 100 specimens from the first set of fabricators,
95 can be expected to have a stiffness K
sec
in excess of
14,486 kip-in./radian, and of those from the second set of
fabricators, 95 can be expected to have stiffnesses in excess
of 26,438 kip-in./radian. If all 22 specimens are lumped
together, then a minimum stiffness of only 6,475 kip-in./
Fig. 7. Descriptive parameters of connection response.
Fig. 6. Friction-type bolt connection response, Series 3.
Fig. 9. Assumed distribution for K
sec
.
Fig. 8. Assumed population distribution.
X
__
=
1
n
i = 1
n
x
i
; n = Sample Size
S =
1
n
i = 1
n
(x
i
X
__
)
2
16 ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION
radian can be assumed at the 95 percent confidence level,
a value so low as to be negligible.
The expected stiffness of specimens from Fabricators 2
and 3 is about twice that of specimens from Fabricators 1,
4, 5, or 6. One might look for obvious manufacturing differ-
ences among these fabricators. The last column of Table 2
gives little clue as to causes: Three different bolt tension con-
trol methods were used by the fabricators of Population A,
among whom two used the same method as one of the fabri-
cators of Population B. The reason for these seemingly sys-
tematic differences remains unknown.
Series 3
The 12
3
8
-in. web angle specimens constituting Series 3
came from one Fabricator (No. 3). In fact, the M- curves
of Fig. 6 show much less scatter prior to bolt slip than those
of Fig. 5 for Series 2. The strength of these connections,
defined by the onset of softening, was determined by bolt
slip; this is in contrast to the softening of the
1
4
-in. angle
connections which was caused by yielding of the outstand-
ing angle legs. The uncertainty of this event seems to be about
the same, no matter what the cause, as evidenced by com-
parison of the coefficients of variation for the strength mea-
sures of Series 2 and 3.
The statistical analysis summarized in Table 6 indicates
that at the 95 percent confidence level both strength and stiff-
ness belong to one population. Values of strength and stiff-
ness which may be expected to be exceeded in 95 out of the
next 100 specimens from Fabricator 3 are also shown in
Table 6.
The coefficient of variation for the stiffness K
sec
of
the specimens of Series 3 is less than half of that of
Series 2, indicating good quality control within one fabrica-
tor. For strength, Series 2 and 3 have similar scatter,
Table 4.
Composite Sample Statistics Test Series 2
Series 2
Sample Size: n = 22
Stiffness Strength
Ksec (kip-in./radian) Ms (kip-in.) Mel (kip-in.)
Sample mean
Standard deviation
Coefficient of variation
48,093
17,710
36.8%
174
32
18.4%
165
35
21.2%
Stat. minimum P = 95%
C = 95% Confidence Interval
min Ksec = 6,475 min Ms = 99 min Mel = 89
Table 5.
Population Dependent Statistics Test Series 2
Series 2
Population A Population B
Ksec (kip-in./radian) Ksec (kip-in./radian)
Fabricator
Sample size
1, 4, 5, 6
n = 14
2, 3
n = 8
Sample mean
Standard deviation
Coefficient of variation
37,325
8,737
23.4%
66,938
12,704
18.9%
Stat. minimum P = 95%
C = 95% Confidence Interval
min Ksec = 14,487 min Ksec = 26,438
Table 6.
Statistics Test Series 3
Series 3
Sample Size: n = 12
Stiffness Strength
Ksec (kip-in./radian) Ms (kip-in.) Mel (kip-in.)
Sample mean
Standard deviation
Coefficient of variation
107,667
15,091
14.2%
328
44
13.4%
323
52
16.1%
Stat. minimum P = 95%
C = 95% Confidence Interval
min Ksec = 65,377 min Ms = 208 min Mel = 180
FIRST QUARTER / 1992 17
indicating the difficulty of predicting bolt slip even within
one shop.
DISCUSSION OF RESULTS
How will these results affect the designer who might wish
to include connection restraint as provided by Type 3 Con-
struction in the ASD, and PR Design in the LRFD Specifi-
cations? An example of this approach has been given by
Lindsey
13
in an effort to optimize purlin size. In such a
case, the engineers likely recourse for the determination of
connection stiffness and strength is to rely on analytical for-
mulations such as that of Frye and Morris, which, as stated
earlier, are deterministic and have in some cases
8
been
found at variance with test data.
For the
1
4
-in. web angle connections of Series 2, the curve
predicted by Frye and Morris is shown in Fig. 10, along with
the range of the M- curves from our tests. The Frye and
Morris curve is somewhat on the high side. Its initial stiff-
ness is also shown, and the connection strength can readily
be extrapolated.
If for safetys sake it is specified that these connection prop-
erties should be at the 95 percent level of confidence, then
our statistical calculations would permit a serviceability
moment and stiffnesses as also shown in Fig. 10, of values
greatly below those given by deterministic formulation, or
by any one of the test curves.
Figure 11 shows similar comparisons for Series 3: The Frye
and Morris prediction is much too high (a fact which veri-
fies the findings of Ref. 8). Because of the low scatter of
the observed initial stiffnesses, the stiffness at the 95 per-
cent confidence level is close to the measured values, but
the strength under serviceability is much lower than any
observed value.
It is clear that in any case the choice of either a determinis-
tic formulation such as that of Frye and Morris, or a single
test case, may lead to connection strength and stiffness
grossly on the unsafe side of values in the actual structure.
CONCLUSIONS
Based on the test results and analyses which have been
presented, we can draw the following conclusions for ro-
tational behavior of the web angle connections under
consideration:
1. The bearing-bolt connections showed unpredictable
behavior; they are not recommended for joints intended
to offer rotational constraint.
2. The friction-bolt connections exhibited a systematic pat-
tern of behavior, whose non-linearity was caused
largely by yielding for thin web angles, and by bolt slip
for thicker angles.
3. The scatter of stiffness is much less for the stronger
than for the weaker connections; on this basis, it may
be expected that the statistical variation of joints
designed as moment-resistant may be more favorable
than that of the web-angle connections.
4. The strength of the connections, while showing con-
siderable scatter, varied insignificantly among fabri-
Fig. 10. Properties of Test Series 2. Fig. 11. Properties of Test Series 3.
18 ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION
cators. Statistical minimum values can be determined
with a reasonable level of confidence.
5. Initial stiffness varied significantly among fabricators
for the thin web-angle connections, although no physi-
cal reasons could be identified. It was not possible to
assign meaningful statistical stiffness values for these
specimens based on the totality of our test data. The
thicker web-angle connections, from one fabricator,
showed much more consistent response.
6. Deterministic predictions of connection behavior, based
on either empirical formulations or single test data, are
likely to overestimate reliable values of strength and
stiffness. Statistically designed replicate test series are
needed to establish these characteristics.
REFERENCES
1. Gerstle, K. H., Flexibly Connected Steel Frames, in
Steel Framed Structures, R. Narayanan, Ed., Elsevier,
London and N.Y., 1985.
2. Bjorhovde, R., Brozzetti, J., and Colson, A., Connec-
tions in Steel Structures, Elsevier, London and N.Y.,
1988.
3. Gerstle, K. H., Effects of Connections on Frames,
Jnl. Construct. Steel Res., Vol. 10, 1988, p. 241.
4. Ackroyd, M. H., and Gerstle, K. H., Strength of
Flexibly-Connected Steel Franes, Engineering Struc-
tures, Vol. 5, 1983, p. 31.
5. AISC, Allowable Stress Specifications, Sec.1.2, 1978.
6. AISC, LRFD Specifications, Sec. A2, 1986.
7. Goverdhan, A., A Collection of Experimental Moment-
Rotation Curves for Semi-Rigid Connections, M.S.
Thesis, Dept. of Civil Engineering, Vanderbilt Univer-
sity, Nashville, TN, 1983.
8. Kishi, N., and Chen, W. F., Data Base of Beam-
Column ConnectionsA Review of Test Data, Report,
School of Civil Engineering, Purdue University, West
Lafayette, IN, 1986.
9. Nethercot, D. A., Steel Beam to Column Connec-
tionsA Review of Test Data and its Applicability to
the Evaluation of Joint Behavior on the Performance of
Steel Frames, CIRIA Project Record 338, Sept. 1985.
10. Frye, M. J., and Morris, G. A., Analysis of Flexibly-
Connected Steel Frames, Can. Jnl. of C.E., Vol. 2,
1975, p. 280.
11. Rauscher, T. R., Reliability of Double-Web Angle Con-
nection Behavior, M.S. Thesis, C.E.A.E. Dept., Uni-
versity of Colorado, Boulder, 1989.
12. Lipson, C., and Sheth, N. J., Statistical Design and
Analysis of Engineering Experiments, McGraw-Hill,
N.Y., 1973.
13. Lindsey, S. D., Ioannides, S. A., and Goverdhan, A.,
LRFD Analysis and Design of Beams, AISC Engi-
neering Journal, Fourth Quarter 1985, p. 157.
ACKNOWLEDGMENT
This study was carried out as an M.S. thesis by the first-
named author in the C.E.A.E. Department of the Univer-
sity of Colorado in Boulder. The following colleagues and
fabricators made this work possible by furnishing specimens,
equipment, funds, and, most importantly of all, enthusiasm
and expert advice, for which we thank them sincerely: Wil-
liam Ashton, Egger Steel, Sioux City, IA; Michael Milot,
Boulder Steel, Boulder, CO; Jim Roscoe, Roscoe Steel,
Boise, ID; Ron Singleton, Stanley Structures, Denver, CO;
Maynard Trostel, Platte River Steel, Greeley, CO; George
Zimmerman, Zimmerman Metals, Denver, CO; and Wil-
liam Zimmerman, Zimkor Industries, Littleton, CO.
FIRST QUARTER / 1992 19
INTRODUCTION
The basic provisions related to design and evaluation of
bending members in the structural steel specifications, either
according to Load and Resistance Factor Design (LRFD)
1
or
Allowable Stress Design (ASD),
2
typically are first presented
from the point of view that the magnitude of bending moment
is constant throughout the entire distance between points of
lateral support for the compression flange. Then, to account
for variations in moment, one multiplies the expression asso-
ciated with constant moment by a correction factor C
b
to
arrive at a result which predicts the actual bending strength
(or allowable stress) for a specific moment gradient. What one
accomplishes is to account for changes that occur in the force
within the compression flange of the beam throughout the
unbraced length.
A procedure for selecting beams in situations involving
non-uniform moment is suggested within the prelude to the
charts of design moments in the LRFD manual, but only in
extremely brief fashion. The purpose of this paper is to review
the principles associated with the application of C
b
, and to
elaborate on the procedure briefly suggested in the LRFD
manual for selecting beams which experience non-uniform
moment (C
b
1).
BENDING STABILITY
Basic notions of column strength apply to stability-related
issues in the strength of sections in bending. With a beam,
however, only a portion of the cross section resists the com-
pression. The key issues are still the restraint provided at the
boundaries of the element resisting the compression and the
distance between the locations of lateral support.
The magnitude of the compressive force within a beam
cross section, which will nearly always vary with position
along the span, may be determined by inspection of the
moment diagram. Since resistance to bending is composed of
the internal C (compressive force) and T (tensile force) cou-
ple, the magnitude of C at any location along a span equals
the applied bending moment divided by the internal moment
arm (Fig. 1). Thus, the variation in force within the compres-
sion flange has the same shape as the moment diagram.
Analogies to Single Columns
Three single columns with different variations in axial load
are shown in Fig. 2. Each column experiences the same axial
compression (equal to the applied force P) within the upper-
most segment. There is a difference, however, in the maxi-
mum force P that could be applied to each column because
the magnitude of axial compression is reduced along the
length of the columns in parts (b) and (c). Intuition dictates
that the greatest load P may be sustained by the column in
Fig. 2(c). By considering free-body diagrams at various po-
sitions along the length of the columns, one observes that
substantial segments of columns (b) and (c) experience re-
duced compression, compared to column (a). Furthermore,
Patrick D. Zuraski is assistant professor of civil engineering,
Louisiana State University, Baton Rouge, LA.
The Significance and Application of
C
b
in Beam Design
PATRICK D. ZURASKI
Fig. 1. Internal bending resistance.
Fig. 2. Columns with varying axial compression.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 20
(c) will compare favorably to (b) because the lowermost
segments of (c) experience less compression and, notably, are
in tension for the last 25 percent of the column.
The moment diagrams in parts (a), (b), and (c) of Fig. 3
may be associated with the individual columns in the respec-
tive parts of Fig. 2. The moment diagrams in Figs. 3(b) and
3(c) would exactly correspond to the respective columns in
Fig. 2 only if the opposing mid-length forces were applied as
a continuous distribution, but the basic analogy is the same.
In part (b) of both Figs. 2 and 3, the force in the compression-
carrying element is high at one end of the element and
decreases by 60 percent at the other end. Similar behavior is
demonstrated in part (c) of Figs. 2 and 3, but the change is
more dramatic. At the far end, that part of the element which
had been experiencing compression actually changes and
becomes a tensile element.
In Figs. 2 and 3, for a given length of compression member,
part (c) exhibits the least vulnerability to instability and may
be assigned the greatest magnitude of compression/bending.
The function of C
b
is to take these aspects of behavior into
account.
BASIC DESIGN EXPRESSIONS
As mentioned previously, design equations pertaining to
beams are first developed from the standpoint of constant
bending moment over the unbraced length. In the LRFD
specification, bending strength is controlled by either of two
equations, Eq. F1-3 or F1-13, depending on whether the yield
stress will have appeared within the cross section at the instant
a loss in load carrying capacity occurs. The presence of
residual stress is taken into account. For the ASD specifica-
tion, allowable bending stress is most frequently controlled
by either Eq. F1-7 or Eq. F1-8, depending on whether lateral
or torsional moment strength, respectively, is the more domi-
nant component of bending strength for a given cross section
at the instant that instability occurs.
Only the basic form (and not specific terms) of these design
equations is relevant to discussing the significance of C
b
. For
LRFD the basic equation is
M
n
C
b
{LRFD Eq. F1-3 or F1-13, for constant moment}
M
p
(1)
and for ASD the following usually applies (unless Eq. F1-6
controls)
F
b
C
b
{ASD Eq. F1-7 or F1-8, for constant moment}
0.6F
y
(2)
where
C
b
1.75 + 1.05
t
M
1
M
2
_
,
+ 0.3
M
1
M
2
_
,
2
2.3 (3)
In Eq. 3, the end moments are considered on an absolute value
basis, with M
1
equal to the smaller of the moments at the ends
of the unbraced length. Should the moment anywhere within
the unbraced length exceed that which occurs at either end,
the above expression is disregarded and C
b
is assigned a value
of one. The matter of the plus/minus sign is considered in the
following.
When moment decreases from a value of any magnitude at
one end of the unbraced length to zero at the other end, the
ratio M
1
/ M
2
= 0 and C
b
= 1.75. (Thus, bending strength [or
allowable stress] is 75 percent greater than that which could
have been achieved had the moment been uniform over the
unbraced length, but limited to a result that does not exceed
M
p
[LRFD] or 0.6F
y
[ASD].) When the smaller end moment
is non-zero, one must decide on a proper sign for the second
term in Eq. 3. Situations that provide increased strength
compared to zero moment at one end must lead to C
b
> 1.75,
and situations with less strength (more closely resembling
uniform moment) should reduce C
b
below 1.75, back toward
1.00. Recalling previous discussion associated with Figs. 2
and 3, the decision regarding the proper sign is very straight-
forward.
For situations of single curvature (moment diagram on only
one side of the baseline for the entire unbraced length), the
same flange is always in compression. If there is little change
in moment over the unbraced length, the compressive force
in the flange will be maintained at a fairly constant level. Such
a condition is more susceptible to instability, and bending
strength should not be increased appreciably from that exhib-
ited when moment is constant. Thus, for single curvature, the
sign of M
1
/ M
2
is negative.
For double (reversed) curvature (moment diagram changes
from one side of the baseline to the other), the flange that
experiences compression eventually changes to tension.
There is greater stability in such a situation, and the moment
that may be applied at one end may be significantly increased
from that which could be applied as constant moment (C
b
=
1), and beyond that for zero moment at one end (C
b
= 1.75).
Thus, for double curvature, the sign of M
1
/ M
2
is positive.
One may note the same expression is used for C
b
in both Fig. 3. Segments with varying bending moment.
FIRST QUARTER / 1992 21
the LRFD and ASD specifications. Since it is the purpose of
this factor to reflect structural behavior and account for the
shape of the moment diagram, it is expected that there would
be no difference in C
b
equations between the specifications.
BEAM DESIGN WHEN C
b
1
Both the LRFD and ASD manuals contain a series of beam
curves that provide invaluable assistance in selecting a sec-
tion that is suitable for a given combination of bending
moment and unbraced length. These curves, designated Beam
Design Moments (LRFD) and Allowable Moments in Beams
(ASD), apply directly when moment is constant throughout
the unbraced length (C
b
= 1). The curves can also provide
significant assistance when C
b
1, after properly accounting
for increased strength resulting from non-uniform moment.
ASD Procedures
Designers have extensive experience with the beam curves in
the ASD manual and have developed a methodology for
selecting beams for situations of non-uniform moment that is
consistent with the design equations governing allowable
stress. Observing ASD Eq. F1-8 (which usually controls
allowable stress, especially for moderate-to-large unbraced
lengths L
b
)
F
b
12 10
3
C
b
L
b
d
A
f
0.60F
y
(4)
it is appropriate to use L
b
/ C
b
and the applied service moment
as an entry point to the curves because F
b
is linear in that
parameter. Should one anticipate that Eq. F1-6 will apply,
experience has shown that L
b
/ C
b
and applied service mo-
ment are an appropriate entry point in the curves for finding
an acceptable section. These well-established procedures for
allowable stress design are illustrated in steel design text-
books (for example, Salmon and Johnson
3
) and require no
further treatment here.
LRFD Procedures
For LRFD design, however, it is more appropriate to divide
the required moment strength M
u
by C
b
(rather than dividing
it into the unbraced length) and use L
b
and M
u
/ C
b
as the entry
point in the beam curves. This procedure, suggested on page
3-56 of the LRFD manual, may be justified by observing the
equation (LRFD F1-3) which usually governs for the most
economical section
M
n
C
b
M
p
(M
p
M
r
)
L
b
L
p
L
r
L
p
_
,
1
1
]
M
p
(5)
One may divide both sides of the equation by C
b
to obtain
M
n
/ C
b
, but there is no significance to the parameter L
b
/ C
b
.
A typical plot of Eq. 5 with C
b
= 1 is shown in Fig. 4. M
p
is
the fully plastic moment, L
p
is the maximum unbraced length
at which that moment may be sustained, M
r
is the level of
bending moment at which yield stress in the flange tips will
first appear (taking into account the presence of residual
stress), and L
r
is the maximum unbraced length at which the
latter moment may be sustained. Eq. 5, then, provides a linear
interpolation between M
p
and M
r
for all unbraced lengths
exceeding L
p
but less than L
r
.
It is very important to note that design situations do not
always allow one to take full advantage of the computed value
of C
b
. Although one may multiply the result obtained within
the brackets in Eq. 5 by C
b
, it is not permissible to assign a
nominal strength any higher than the fully plastic moment.
Thus, to ensure that an acceptable section has been located
when entering the curves with L
b
and M
u
/ C
b
, one must verify
that the intended section is one that also results in
b
M
p
exceeding the required strength from factored loads, M
u
. Only
then will an adequate section have been selected. Example
designs are provided in the following, including remarks in
Example 3 which provides clarification of errors contained
within a design example in the LRFD manual.
Example 1
Given:
For a required design moment of M
u
= 500 kip-ft, L
b
= 20 ft
and C
b
= 1.17, use the LRFD beam curves (Beam Design
Moments) to select the lightest section of F
y
= 36 ksi steel (see
Fig. 5).
Solution:
The entry point for the beam curves on page 3-66 of the LRFD
Manual is L
b
= 20 ft and M
u
/ C
b
= 500 / 1.17 = 427 kip-ft. A
W2484 is found to be the lightest section, providing M
u
of
444 kip-ft at L
b
= 20 ft, when C
b
= 1. Since C
b
equals 1.17,
the design strength of this section actually is 444 1.17 = 519
kip-ft (> 500 kip-ft required, o.k.) as long as
b
M
p
500
kip-ft. By inspection of page 3-66 one may note the
b
M
p
value for a W2484 exceeds 500 kip-ft (605 kip-ft, actual value),
Fig. 4. Design moment strength vs. unbraced length.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 22
verifying that the section is acceptable. Use a W2484, F
y
=
36 ksi.
Example 2
Given:
Repeat Example 1, changing the value of C
b
from 1.17 to 1.75
(see Fig. 6).
Solution:
The entry point for the beam curves on page 3-70 of the LRFD
manual is L
b
= 20 ft and M
u
/ C
b
= 500 / 1.75 = 286 kip-ft. Any
section listed above and to the right of this entry point is
acceptable, if it additionally satisfies
b
M
p
500 kip-ft. The
first two beams encountered are a W1667 and W2168, but
these sections are unacceptable because they have maximum
design strength
b
M
p
equal to 351 and 432 kip-ft, respectively,
and 500 kip-ft is required. Having used M
u
/ C
b
as the effec-
tive moment for the entry point, one must not forget that it
frequently is not possible to take full advantage of C
b
. The
problem one encounters is illustrated for the W2168 in Fig.
7. With C
b
= 1 and L
b
= 20 ft, the design strength of the beam
is 303 kip-ft (page 3-68 of LRFD manual), and 303 1.75 >
500. The maximum design strength (
b
M
p
) of the section is
only 432 kip-ft, however, and using the full value of C
b
elevates the design strength of the W2168 to an unattainable
level.
To find an acceptable beam, though, one need only con-
tinue to move straight up along the line L
b
= 20 ft, discarding
several unacceptable sections (W2468, W2173, W1677,
and W1876), until eventually reaching a W2476. It pro-
vides M
n
of 386 kip-ft at L
b
= 540 kip-ft, which is greater
than the 500 kip-ft required. (Although C
b
has a value of 1.75
for the actual moment gradient, the maximum effective value
is only 540 / 386 = 1.40.) Use a W2476, F
y
= 36 ksi.
WHEN C
b
> > M
p
/ M
r
After examining a moderate number of design problems, one
concludes that the lightest beam is often a section for which
the constant-moment design strength being provided (
b
M
n
when C
b
= 1) exceeds M
r
, or, stated differently, L
b
L
r
. The
implication of this in design situations is that it may be
unnecessary to examine the beam curves whenever C
b
>
M
p
/ M
r
. One need only refer to the tabulation of ascend-
ing/descending
b
M
p
values in the Load Factor Design Selec-
tion Table (LRFD manual, pages 3-133-17) to find the
lightest beam with strength exceeding the required design
strength (a procedure recommended in Ref. 3, as well). To be
sure the beam is acceptable, though, one must also verify that
the tabulated L
r
is greater than the unbraced length. (In cases
of large C
b
, should it happen that the lightest beam from the
selection table is one for which L
r
< L
b
by only a small amount,
the beam may still be acceptable. The section will have to be
verified, however, either by checking that C
b
times the value
from the beam curves [with C
b
= 1] is greater than the required
design strength, or by computing the strength according to
LRFD Eq. F1-13. See Example 5.)
Beginning with the expressions for M
p
and M
r
, and noting
that the shape factor (Z / S) for rolled steel beams is approxi-
mately 1.12, one may compute
M
p
M
r
F
y
Z
(F
y
F
r
)S
1.12
F
y
(F
y
F
r
)
_
,
(6)
where F
r
= 10 ksi residual stress for rolled shapes, and then
substituting for F
y
one obtains M
p
/ M
r
= 1.55 and 1.38 for F
y
= 36 and 50 ksi steels, respectively. Then, for example, for
situations with F
y
= 36 ksi and C
b
> 1.55, one may proceed
directly to the Load Factor Design Selection Table to select
the lightest beam, simultaneously checking that L
b
L
r
. Had
one followed this procedure in Example 2 (C
b
= 1.75, and >
1.55), a W2476 (L
r
> 20 ft) would be selected very quickly.
The advantage of using this table, compared to the procedure
previously illustrated, is that no time would be spent in
discarding all the unacceptable sections with maximum de-
sign strength less than the applied moment due to factored
loads.
Fig. 5. Moment diagram for Example 1. Fig. 6. Moment diagram for Example 2.
FIRST QUARTER / 1992 23
Example 3
Given:
Select the lightest section for the situation described in the
example problem appearing on page 3-56 of the LRFD man-
ual. The required design moment M
u
= 352 kip-ft, L
b
= 15 ft,
and C
b
= 1.75 (see Fig. 8).
Solution:
With C
b
> 1.55 (M
p
/ M
r
for 36 ksi steel), one may proceed
directly to the Load Factor Design Selection Table, searching
for
b
M
p
> 352 kip-ft and L
r
> 15 ft. Use a W2455, F
y
= 36
ksi (
b
M
p
> 352 kip-ft and L
r
= 16.6 ft).
If one elects to use the beam curves on page 3-70 of the
LRFD manual, the entry point is L
b
= 15 ft and M
u
/ C
b
=
352 / 1.75 = 201 kip-ft. Similar to the situation illustrated in
Example 2, several beams must be discarded because their
maximum design strength
b
M
p
is less than M
u
= 352 kip-ft.
In the example in the LRFD manual, although inadequate
sections are appropriately disregarded, the lightest section
was not selected. A W2162 was selected instead of a
W2455. While sorting through the various beams that must
be discarded when using an effective moment (M
u
/ C
b
) ob-
tained with a large C
b
, it is easy enough to overlook a section
that is actually satisfactory. On the other hand, by using the
selection table, as illustrated previously within this example,
the path to finding the W2455 is very direct. (Incidentally,
on page 3-70 at L
b
= 15 ft and C
b
= 1, M
n
for a W2455 is
242 kip-ft, and 1.75 242 > 352 kip-ft, o.k.)
A comment is in order regarding a statement appearing in
the example in the LRFD manual. With regard to using an
entry point based on an effective moment, the example states,
Any beam listed above and to the right of the point satisfies
the design moment. It should read, instead, Any beam listed
above and to the right of the point, and with
b
M
p
> M
u
, will
have a strength which exceeds the design moment. Although
the example acted in accordance with the latter version of the
statement, it is misleading to have it printed according to the
former.
Another clarification is appropriate for the example in the
LRFD manual, related to the sentence, The design moment
for a W2162 with an unbraced length of 15 ft is 314 kip-ft
and
b
M
p
is 389 kip-ft. Following 314 kip-ft one should
insert (if C
b
were 1). With C
b
equal to anything greater than
389 / 314 = 1.24, and L
b
= 15 ft, the design moment for a
W2162 is 389 kip-ft.
Example 4
Given:
Select the lightest beam of F
y
= 36 ksi steel for a required
design moment of M
u
= 406 kip-ft, L
b
= 16 ft, and C
b
= 1.75
(see Fig. 9).
Solution:
With C
b
> 1.55 and 36 ksi steel, one may proceed directly to
the Load Factor Design Selection Table, searching for
b
M
p
406 kip-ft and L
r
16 ft. One obtains a W2462, with
b
M
p
= 413 kip-ft and L
r
= 17.2 ft.
Alternatively, electing to use the beam curves, one enters
Fig. 7. Bending strength for W2168 in Example 2.
Fig. 8. Moment diagram for Example 3.
Fig. 9. Moment diagram for Example 4.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 24
page 3-70 in the LRFD manual with L
b
= 16 ft and M
u
/ C
b
=
406 / 1.75 = 232 kip-ft. Checking all sections drawn with a
solid line (to designate the lightest section available in a
particular range of moments) while progressing upward along
the line L
b
= 16 ft, W1855, W1860, and W2162 must all
be disqualified because these sections have maximum design
strength
b
M
p
< 406 kip-ft. The first satisfactory solid line
beam encountered is a W2168. A W2462 is a lighter beam,
though, as determined earlier in this example. This illustrates
that when using an entry point based on an effective moment
(with C
b
1), beams designated with dashed lines in the
beam curves cannot be overlooked as candidates for the
lightest section. Use a W2462, F
y
= 36 ksi.
Example 5
Given:
Repeat Example 4, increasing the unbraced length from 16 to
18 ft (M
u
and C
b
still equal 406 kip-ft and 1.75, respectively).
Solution:
Now, when finding the W2462 in the selection table, one
observes that the unbraced length of 18 ft exceeds L
r
= 17.2
ft. The design strength provided, which will be less than
1.75M
r
, may still be acceptable, but it has to be verified
because L
b
> L
r
. From the beam curves, for L
b
= 18 ft and C
b
= 1,
b
M
n
= 239 kip-ft. Accounting for C
b
, 1.75 239 = 418
kip-ft, but the limit = M
p
= 413 kip-ft. This exceeds the
required design strength of 406 kip-ft, so the W2462 is still
acceptable at L
b
= 18 ft.
SUMMARY OF LRFD DESIGN PROCEDURE
FOR C
b
1
1. When C
b
M
p
/ M
r
(1.55 and 1.38 for F
y
= 36 and 50 ksi,
respectively), use the Load Factor Design Selection
Table for beam design, searching for sections satisfying
M
p
required design strength and L
r
unbraced
length.
2. For design situations where C
b
< M
p
/ M
r
, or L
b
is greater
than many of the L
r
values tabulated in the selection
table, enter the beam curves (Beam Design Moments
section beginning on page 3-57 in the LRFD manual)
with L
b
and an effective moment equal to M
u
/ C
b
. Any
beam above and to the right of the entry point will be
acceptable, provided it satisfies
b
M
p
> M
u
.
REFERENCES
1. American Institute of Steel Construction, Load and Resis-
tance Factor Design Specification for Structural Steel
Buildings (September 1, 1986), Manual of Steel Con-
struction: Load and Resistance Factor Design, 1st ed.,
Chapter 6, 1986.
2. American Institute of Steel Construction, Specification
for Structural Steel Buildings: Allowable Stress Design and
Plastic Design (June 1, 1989), Manual of Steel Construc-
tion: Allowable Stress Design, 9th ed., Chapter 5, 1989.
3. Salmon, Charles G. and Johnson, John E., Steel Structures:
Design and Behavior, Harper and Row, New York, 1990,
p. 562.
FIRST QUARTER / 1992 25
INTRODUCTION
Flexural-torsional buckling of compression members must
now be considered when designing under all AISC specifica-
tions, i.e., Load and Resistance Factor Design
1
(LRFD) and
Allowable Stress Design
2
(ASD). Many practicing structural
engineers are probably somewhat unfamiliar with the basic
flexural-torsional buckling theory and its meaning and appli-
cation in the design environment. Zahn and Iwankiw
3
have
presented an overview on this topic as a means of providing
a practical understanding of this strength limit state. Further-
more, the presentation of this new dimension to novice design
students not only poses a similar dilemma, but is compounded
by the fact that more and more material must be crammed into
an already crowded initial course of steel design.
It would seem reasonable that an attempt should be made
to find a way of introducing this additional buckling mode to
both students and practicing designers that would not only be
comprehensive in nature, but easy to apply in the design
arena. This could be accomplished by using the concept of an
equivalent radius of gyration which has been utilized for
many years and in a variety of design formats.
4,5
Thus, if an
equivalent radius of gyration could be easily established for
flexural-torsional buckling, that radius could be used along
with the other applicable radii of gyration, i.e., r
x
and r
y
, to
establish the minimum tangent-modulus Euler load that
would produce the governing critical buckling load. Such a
concept could be easily explained and applied and, thus,
provides the basis for this paper.
TORSIONAL AND FLEXURAL-TORSIONAL
BUCKLING OF COLUMNS
Although most axially loaded columns fail at either the tan-
gent modulus Euler load or the load that produces significant
local buckling, there is another mode of buckling failure
which is characterized by twisting and occurs at smaller
column lengths. Twist or torsional buckling is significant only
for open cross-sections with relatively thin-walled elements
such as angles, structural tees, and channels.
The problem of torsional buckling in columns has been
studied extensively by many investigators including Goodier,
6
Timoshenko and Gere,
7
and Hoff.
8,9
Such a detailed examination
is beyond the scope of this paper. An attempt will be made,
however, to summarize this problem in such a way as to shed
light on the basic parameters that contribute to this buckling
phenomenon. This paper also describes a reliable, quick ap-
proach to implementing such considerations, when applicable,
into the design sequence of compression members.
Consider the thin-walled open cross-section of an arbitrary
unsymmetrical shape as shown in Fig. 1. The deformation
Jack D. Bakos, Jr. is professor and chair of Civil Engineering,
Youngstown State University, Youngstown, OH.
James A. OLeary is graduate teaching assistant, Civil Engi-
neering Department, Youngstown State University, Youngs-
town, OH.
An Equivalent Radius of Gyration Approach to
Flexural-Torsional Buckling for
Singly Symmetric Sections
JACK D. BAKOS, JR. and JAMES A. OLEARY
Fig. 1. Flexural-torsional buckling notations and displacements.
9
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 26
taking place during buckling is assumed to be a simultaneous
combination of twisting about the shear center and bending
about the two centroidal axes. It is desirable to maintain
simplicity by reducing the deformation into two pure transla-
tions and a pure rotation. This can be accomplished by using
the shear center (O) as the origin of the general coordinate
system. The x and y directions are assumed to coincide with
the principal axes of the section and the z direction is taken
along the longitudinal axis through the shear center. As the
result of buckling, the section undergoes translations u and v
in the x and y directions, respectively, and a rotation about
the z axis (see Section B-B in Fig. 1).
Thus, in the general case where the shear center does not
coincide with the section centroid, the buckling failure is
actually a combination of torsion and flexure. For this case,
the three differential equations which describe buckling by
lateral bending about the x-axis, buckling by lateral bending
about the y-axis and twisting about the shear center are
interdependent. These three differential equations must be
solved simultaneously in order to obtain the buckling loads.
The development and solution of these simultaneous, inter-
dependent equations have been treated extensively by Hoff
9
and Chajes,
10
and thus only the results will be presented here.
For the unsymmetric case, the critical buckling load is the
lowest of the three possible roots of the cubic equation
(P
y
P)(P
x
P)(P
z
P)(P
y
P)
p
2
x
O
2
r
O
2
0 (1)
where:
P
x
2
EI
x
/ L
2
P
y
2
EI
y
/ L
2
(2)
P
z
1
r
O
2
GJ + E
C
w
2
L
2
_
,
r
O
= the polar radius of gyration of the cross-section with
respect to the shear center.
The first two expressions are the usual Euler flexural
buckling loads about the x and y axes, respectively. The third
term P
z
corresponds to torsional buckling in which C
w
is the
warping constant and J is the torsional constant. Values of J
for non-circular shapes are available in textbooks on the
theory of elasticity. For structural shapes such as the angle,
W or I shapes, and channels made up of relatively thin,
rectangular elements, J may be taken as:
J bt
3
/ 3 (3)
where b and t are the width and thickness of the rectangular
elements of the cross-section respectively. Fortunately, the
torsional values (including r
O
) for most shapes are tabulated
in Part 1 of the AISC LRFD and ASD manuals. It can be
clearly seen from the terms in this cubic equation that failure
of an unsymmetric column section will be a combination of
buckling about the x and y axes and twisting about the z axis,
as shown in Fig. 1.
If the cross-section has two axes of symmetry such as a
wide flange member, the shear center (O) and the centroid (C)
coincide, i.e., x
O
= 0, y
O
= 0, and the cubic equation reduces
to
(P
y
P)(P
x
P)(P
z
P) 0 (4)
whose roots are
P P
y
2
EI
y
/ L
2
P P
x
2
EI
x
/ L
2
(5)
P P
z
1
r
O
2
GJ +
2
EC
w
L
2
_
,
and the governing critical load will be the lowest load P. For
columns in which the shear center and centroid are coinci-
dent, i.e., doubly symmetric shapes such as a wide flange,
buckling will occur by the usual bending about one of the
principal axes (flexural buckling) or by twisting (torsion)
about the shear center (centroid). Combined flexural-tor-
sional buckling does not occur since there are three inde-
pendent solutions resulting in the fact that the twisting and
flexural modes do not interfere (interact) with one another. In
addition, torsional buckling will not generally control the
design unless the member is relatively short, and this is not
usually encountered in practice. In fact, material yielding may
result before torsional buckling can occur in these sections.
When the cross-section has only one axis of symmetry, say
the y axis, the shear center lies on that axis and x
O
= 0. For
this case the cubic equation for the critical buckling load
reduces to
(P
x
P)
(P
y
P)(P
z
P)
p
2
y
O
2
r
O
2
1
1
]
0 (6)
whose solution yields
P P
x
2
EI
x
/ L
2
or
(P
y
P)(P
z
P)
p
2
y
O
2
r
O
2
0 (7)
The first expression is flexural buckling about the x axis and
the second is a quadratic in P whose roots correspond to
buckling by a combination of bending and twisting, i.e.,
flexural-torsional buckling. The smaller of the roots is
P P
ft
1
2k
[P
z
+ P
y
(P
z
+ P
y
)
2
4kP
z
P
y
] (8)
where:
FIRST QUARTER / 1992 27
k 1 (y
O
/ r
O
)
2
Notice that for a singly symmetric shape such as an equal-leg
angle, double angles, or tees, flexural buckling (about the
symmetrical axis) and torsional buckling interact or are inter-
dependent thereby indicating that buckling for such shapes
will be by either flexural buckling about the non-symmetric
axis or by the interacting flexural-torsional buckling. Which
of these two modes is critical depends upon the shape of the
cross-section as well as the given effective length.
In summary, for doubly symmetric sections it is customary
and safe to neglect torsional buckling and base the design on
the critical Euler load. For singly symmetric sections (double
angles, tees, etc.) and unsymmetric sections, the flexural-tor-
sional buckling load may be considerably less than the Euler
load and thus, can govern the design.
If one takes the critical buckling load equations presented
herein, and converts them to critical stresses by dividing
through by the cross-section area A, these equations will
reduce to those presented in Appendix E of the AISC LRFD
Specification, provided that some additional modifications
and substitutions are made such as
r
O
2
x
O
2
+ y
O
2
+
I
x
+ I
y
A
H 1
x
O
2
+ y
O
2
r
O
2
_
,
L KL (9)
r
x
I
x
/ A
r
y
I
y
/ A
EQUIVALENT RADIUS OF GYRATION CONCEPT
Converting the expression for the critical torsional buckling
load P
z
given by Eq. 2 to a critical stress yields
F
z
1
I
p
GJ +
2
EC
w
L
2
_
,
(10)
Equating the critical Euler stress to this value yields
2
E
(L / r)
2
1
I
p
GJ +
2
EC
w
L
2
_
,
r
t
2
L
2
2
EI
p
GJ +
2
EC
w
L
2
_
,
(11)
GJL
2
2
EI
p
+
C
w
I
p
Taking G = 0.4E and
2
= 9.87
r
t
2
0.04JL
2
I
p
+
C
w
I
p
and (12)
r
t
0.04JL
2
I
p
+
C
w
I
p
where r
t
is the equivalent radius of gyration for torsional
buckling. Notice that r
t
is a function of the column length L.
Proceeding in a similar fashion for the flexural-torsional
buckling mode,
2
E
(L / r)
2
P
ft
A
(13)
yields
1
r
ft
2
1
2r
t
2
+
1
2r
y
2
+
1
2r
t
2
1
2r
y
2
_
,
2
+
Y
O
r
t
r
y
r
O
_
,
2
(14)
where r
ft
is the equivalent radius of gyration (in inches) for
flexural-torsional buckling and r
O
is the polar radius of gyra-
tion ( I
p
/ A) where I
p
is the polar moment of inertia about the
shear center. It must be emphasized that since the expression
for r
ft
contains r
t
, then r
ft
is also dependent on the column length
L.
This equivalent radius of gyration can be employed as with
any radius of gyration. Therefore, if a singly symmetric
section is considered such that x
O
= 0, then (K
x
L
x
/ r
x
) and
(K
z
L
z
/ r
ft
) can be compared to determine which controls, since
it is these two buckling modes which have to be considered
for such singly symmetric shapes. The larger effective slen-
derness ratio value will govern the design and can be used
with the applicable stress equations (either F
cr
in LRFD or F
a
in ASD) to determine the controlling design or allowable load.
In either case (LRFD or ASD), local buckling must be con-
sidered and the introduction of the form factors Q
s
and Q
a
can
be incorporated as usual. For LRFD design, the additional
consideration of (KL / r)
m
for built-up members may also be
incorporated when applicable using the usual procedures.
Before proceeding with specific design applications, some
attention must be devoted to the physical significance of the
equivalent radius of gyration r
ft
. A plot of the various radii of
gyration versus effective lengths are presented in Fig. 2 for a
pair of 841 angles, long legs back-to-back (
3
8
-in. spacing).
As was stated earlier, r
ft
is a function of the effective length of
the column while the other significant radii are constant for a
given section and separation distance. For sections with r
x
> r
y
,
flexural-torsional buckling will always control the buckling
mode for any given effective length. For large effective
lengths there will be essentially no difference between
flexural buckling about the y-axis and flexural-torsional
buckling, i.e., r
y
r
ft
. For sections where r
x
< r
y
a different
relationship between these radii is obtained as shown in Fig.
3. In this instance, it would appear that flexural-torsional
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 28
buckling occurs for short effective column lengths only. Since
the equivalent radii r
t
and r
ft
are approximately equal for very
short effective lengths, torsional buckling is probably the
controlling mode in these intervals. However, no accuracy is
lost by assuming that r
ft
r
t
in such instances.
In summary it should be noted that for sections represented
by Figs. 2 and 3, only (KL / r)
x
and (KL / r)
rt
need to be
compared since r
y
will always be greater than r
ft
. At short
effective lengths r
t
should also be considered since torsional
buckling might control. However, since r
ft
and r
t
are numeri-
cally close for these lengths, no accuracy will be sacrificed
by using r
ft
for all cases.
The equivalent radius of gyration, r
ft
, was computed and
tabulated for all practical effective lengths for each double
angle section (long legs and short legs back to back) as well
as for each structural tee (cut from W shapes) that appears in
the column load tables of the AISC manuals of steel construc-
tion. For the pairs of angles, back to back spacings of 0 in.,
3
8
-in., and
3
4
-in. have been included.
USE OF TABLES
In order to demonstrate the use of the equivalent radius of
gyration (r
ft
) concept for flexural-torsional buckling in a de-
sign scenario, a series of examples is presented using both the
AISC LRFD and ASD Specifications. Each example is con-
cluded by demonstrating its accuracy using a comparison
with tabular values presented in the AISC manuals. It should
also be noted that an added benefit of these tabular r
ft
values
is that the designer is not limited by the grade of the steel used.
Example 1
Given:
Determine the design strength using the AISC LRFD Speci-
fication for a pair of 53
3
8
angles (long legs back to back,
3
8
-in. spacing) with KL
x
= KL
y
= 14 ft. Use A36 steel and
assume two intermediate connections.
Solution:
From the AISC LRFD Manual Part 1:
Q
s
= 0.982 r
z
= 0.654 in. A
g
= 5.72 in.
2
r
x
= 1.61 in. r
y
= 1.23 in.
From the r
ft
tables: r
ft
= 1.19 in. (at KL = 14 ft.)
Since KL
x
= KL
y
and r
ft
< r
y
< r
x
, flexural-torsional buckling
will control.
Checking AISC LRFD Section E4:
a = (14)(12) / 3 = 56 in.
a / r
i
= 56 / 0.654 = 85.63 > 50. Therefore, a modified
slenderness ratio using AISC LRFD Eq. E4-2 must be
computed.
Fig. 2. r
ft
vs. KL for double angles 841 LLBB,
3
8-in. spacing.
Fig. 3. r
ft
vs. KL for double angles 33
3
8, equal legs, 0-in.
spacing.
FIRST QUARTER / 1992 29
KL
r
_
,m
12(14)
1.19
1
1
]
2
+ (85.63 50)
2
145.60
c
145.60
36
29,000
1.633 (AISC LRFD Eq. E2-4)
since
c
Q 1.633 0.982 = 1.62 > 1.5, use AISC LRFD Eq.
E2-3.
F
cr
0.877
(1.633)
2
1
1
]
(36) 11.84 ksi
P
u
A
g
F
cr
(5.72)(11.84) 67.72 kip
P
u
P
n
0.85(67.72) 57.56 kip, say 58 kip
Using the AISC LRFD column load tables (p. 2-62) as veri-
fication
P
u
= 57 kip
Example 2
Given:
Determine the design strength using the AISC LRFD Speci-
fications for a pair of 53
1
2
angles (long legs back to back,
0-in. spacing) with KL
x
= 20 ft. and KL
y
= 15 ft. Use A36 steel
and assume 2 intermediate connections.
Solution:
From the AISC LRFD Manual Part 1:
Q
s
= 1.0 r
z
= 0.648 in. A
g
= 7.5 in.
2
r
y
= 1.12 in r
x
= 1.59 in.
From the r
ft
tables: r
ft
= 1.11 in. (at KL = 15 ft.)
KL
x
/ r
x
= (12)(20) / 1.59 = 150.9
KL
y
/ r
y
= (12)(15) / 1.12 = 160.7
KL
y
/ r
ft
= (12)(15) / 1.11 = 162.2
Since KL
y
/ r
ft
is the maximum effective slenderness ratio,
flexural-torsional buckling will control.
Checking AISC LRFD Section E4:
a = (15)(12) / 3 = 60 in.
a / r
i
= 60 / 0.648 = 92.6 > 50. Therefore, a modified slender-
ness ratio using AISC LRFD Eq. E4-2 must be computed.
KL
r
_
,m
12(15)
1.11
1
1
]
2
+ (92.6 50)
2
167.66
c
167.66
36
29,000
1.88 (AISC LRFD Eq. E2-4)
since
c
> 1.5, use AISC LRFD Eq. E2-3.
F
cr
0.877
(1.88)
2
1
1
]
(36) 9.93 ksi
P
n
A
g
F
cr
(7.5)(8.93) 66.98 kip
P
u
P
n
0.85(66.98) 56.93 kip, say 57 kip
Using AISC LRFD Table 3-36 (p. 6-124):
For Kl / r = 167.66, F
cr
= 7.59 ksi
P
n
F
cr
A
g
= (7.59)(7.5) = 56.92 kip, say 57 kip
Again, using the AISC LRFD column load tables (p. 2-62) as
verification. Note r
y
(
3
8
-in. spacing) = 1.25 in. and r
y
(0-in.
spacing) = 1.12 in.
r
y
/ r
y
= 1.25 / 1.12 = 1.116
An equivalent KL for
3
8
-in. spacing = 1.116(15) = 16.74 ft.
and by interpolation from the table P
u
= 56.67 kip, say 57 kip
Example 3
Given:
Determine the design strength using the AISC LRFD Speci-
fication for a WT10.525 with KL
x
= KL
y
= 14 ft. Use A36
steel.
Solution:
From the AISC LRFD Manual Part 1:
Q
s
= 0.733 A
g
= 7.36 in.
2
r
y
= 1.30 in. r
x
= 3.30 in.
From the r
ft
tables: r
ft
= 1.20 in. (at KL = 14 ft.)
Since KL
x
= KL
y
and r
ft
< r
y
< r
x
, flexural-torsional buckling
will control.
c
14(12)
1.20
36
29,000
1.570 (AISC LRFD Eq. E2-4)
since
c
Q 1.570 0.733 = 1.34 < 1.5, use AISC LRFD Eq.
E2-2.
F
cr
0.733(0.658
(1.34)
2
)36 12.44 ksi
P
n
A
g
F
cr
(7.36)(12.44) 91.56
P
u
P
n
0.85(91.56) 77.82 kip, say 78 kip
Using the AISC LRFD column load tables (p. 2-87) again for
verification,
P
u
= 77 kip
Example 4
Given:
Determine the allowable load using the AISC ASD Specifi-
cation for a pair of 74
3
4
angles (long legs back to back,
3
8
-in. spacing) with KL
x
= KL
y
= 12 ft. Use A36 steel.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 30
Solution:
From the AISC ASD Manual Part 1:
Q
s
= 1.0 A
g
= 15.4 in.
2
r
y
= 1.62 in. r
x
= 2.22 in.
From the r
ft
tables: r
ft
= 1.56 in. (at KL = 12 ft.)
Since KL
x
= KL
y
and r
ft
< r
y
< r
x
, flexural-torsional buckling
will control.
KL / r
ft
= (12)(12) / 1.56 = 92.31
C
c
2
2
E / F
y
2
2
(29,000) / 36 126.1
Since KL / r < C
c
, use AISC ASD Eq. E2-1.
F
a
1
(92.31)
2
2(126.1)
2
1
1
]
36
5
3
+
3(92.31)
8(126.1)
(92.31)
3
8(126.1)
3
13.93 ksi
Or using AISC ASD Table C-36 (p. 3-16):
For KL / r = 92.31, F
a
= 13.93 ksi
P F
a
A
g
= (13.93)(15.4) = 214.5 kip, say 214 kip
Using the AISC ASD column load tables (p. 3-68) for
verification
P = 214 kip
Example 5
Given:
Determine the allowable load using the AISC ASD Specifi-
cation for a WT1566 with KL
x
= 40 ft. and KL
y
= 20 ft. Use
GR50 steel.
Solution:
From the AISC ASD Manual Part 1:
Q
s
= 0.664 A
g
= 19.4 in.
2
r
y
= 2.25 in. r
x
= 4.66 in.
From the r
ft
tables: r
ft
= 2.12 in. (at KL = 20 ft.)
KL
x
/ r
x
= (12)(40) / 4.66 = 103.0
KL
y
/ r
y
= (12)(20) / 2.25 = 106.7
KL
y
/ r
ft
= (12)(20) / 2.12 = 113.21
Since KL
y
/ r
ft
is the maximum effective slenderness ratio,
flexural-torsional buckling will control.
C
c
2
2
E
QF
y
2
2
(29,000)
(0.664)(50)
131.31
where Q
s
Q
Since KL / r < C
c
, use AISC ASD Eq. A-B5-11.
F
a
(0.664)
1
(113.21)
2
2(131.31)
2
1
1
]
(50)
5
3
+
3(113.21)
8(131.31)
(113.21)
3
8(131.31)
3
10.92 ksi
P F
a
A
g
= (10.92)(19.4) = 211.85 kip, say 212 kip
Using the AISC ASD column load tables (p. 3-88) for
verification
P = 211 kip
CONCLUSIONS
Flexural-torsional buckling is a concept unfamiliar to most
designers, and yet it can be the predominant factor in the
design of singly symmetric compression members. A detailed
explanation of this buckling mode cannot be found in most
elementary steel design texts, and thus the seasoned designer,
as well as the steel design student, are left to using a series of
complicated design equations as a means of evaluating this
phenomenon. While the column load tables in the AISC
manuals deal effectively with this buckling mode, a student
or novice designer would have some difficulty duplicating
these tabular values. For grades of steel other than A36 or
GR50, these designers would be left to their own means to
consider the flexural-torsional contribution to the design
process.
The introduction of the equivalent radius of gyration for
flexural-torsional buckling (and torsional buckling to some
degree) is an effective way of introducing the concept of this
buckling mode to the steel design student or the novice
designer. The tables associated with this equivalent radius of
gyration provide an excellent supplement to the AISC manu-
als and an easy way to introduce this buckling mode into the
usual design procedure for compression members. With some
brief initial explanation of this buckling phenomena and how
it interacts with the usual flexural buckling considerations (as
presented herein), the introduction of the equivalent radius of
gyration for flexural-torsional buckling blends right into
usual design considerations and computations.
NOMENCLATURE
The symbols used in this paper follow the usage of the AISC
ASD Manual, 9th Edition and the AISC LRFD Manual, 1st
Edition.
REFERENCES
1. American Institute of Steel Construction, Load and Re-
sistance Factor Design Manual of Steel Construction, 1st
ed., Chicago: AISC, 1986.
2. American Institute of Steel Construction, Allowable
Stress Design Manual of Steel, 9th ed., Chicago: AISC,
1989.
3. Zahn, Cynthia J. and Iwankiw, Nestor R., Flexural-Tor-
FIRST QUARTER / 1992 31
sional Buckling and Its Implications for Steel Compres-
sion Member Design, AISC Engineering Journal, (4th
Quarter 1989), Vol. 26, No. 4, pp. 143154.
4. Bleich, Freidrich, Buckling Strength of Metal Structures,
New York: McGraw-Hill Book Company, 1952, pp. 104
138.
5. Gaylord, E. H. and Gaylord, C. N., Design of Steel Struc-
tures, 2nd ed., New York: McGraw-Hill Publishing Co.,
1957, pp. 132137.
6. Goodier, J. N., The Buckling of Compressed Bars by
Torsion and Flexure, Cornell University Experiment Sta-
tion Bulletin, No. 27. Ithaca, N.Y., 1941.
7. Timoshenko, S. P. and Gere, J. M., Theory of Elastic
Stability, 2nd ed., New York: McGraw-Hill Book Com-
pany, 1961.
8. Hoff, N. J., A Strain Energy Derivation of the Torsional-
Flexural Buckling Loads of Straight Columns of Thin-
Walled Open Sections, Quarterly of Applied Mathemat-
ics, Vol. 1, No. 4, 1944.
9. Hoff, N. J., The Analysis of Structures, New York: John
Wiley and Sons, Inc., 1956.
10. Chajes, Alexander, Principles of Structural Stability, The-
ory, Prentice Hall, Inc., Englewood Cliffs, New Jersey,
1974.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 32
FIRST QUARTER / 1992 33
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 34
FIRST QUARTER / 1992 35
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 36
FIRST QUARTER / 1992 37
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 38
FIRST QUARTER / 1992 39
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 40
FIRST QUARTER / 1992 41
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 42
FIRST QUARTER / 1992 43
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 44
INTRODUCTION
The bracing systems that are the subject of this work are
structural components or assemblies that are intended to
prevent buckling or reduce the effective unsupported length
of columns, towers, truss chords, and other members or
structures loaded in compression. (In some applications, the
same system is also used to resist externally applied loads.)
Widely varying criteria, with little or no rational basis, are in
use for the design of these bracing systems.
It is generally recognized that bracing systems need stiff-
ness (to limit deformation of the braced components or struc-
tures and to cause them to behave in the intended manner) and
strength (to provide the necessary stabilizing forces). In many
situations, the stiffness and strength requirements are related
to each other: reduced stiffness allows greater deformation,
which in turn results in increased force on the bracing.
Rigorous analysis to determine the required stiffness and
strength of bracing systems can be very complicated. Fortu-
nately, rigorous analysis is rarely necessary. The simple,
approximate, bounded solution proposed in this paper is
applicable to most situations that designers are likely to face.
PROPOSED TECHNIQUE
The proposed technique is based on the fact that, typically,
there is a clear and direct relationship between the displaced
configuration of the braced element or structure and the
magnitude of the stabilizing force that must be provided by
the bracing system. It is important to note that the displaced
configuration in the preceding statement is the configuration
after all displacements have occurred, including those caused
by deformation of the bracing system. While bracing stiffness
is not mentioned explicitly, it is significant in that it affects
the displaced configuration. The proposed general procedure
for determining bracing forces for design consists of the
following steps:
1. Estimate the critical displaced geometry of the structure,
i.e., the geometry that results in the largest value of the
particular bracing force that is being determined. The
critical geometry may be different for different bracing
components; maximum forces on the different compo-
nents may not occur simultaneously. The estimated dis-
placed configuration should include the effects of initial
imperfections, deformations due to externally applied
loading, and deformations due to bracing or stabilizing
effects.
2. Compute the bracing force corresponding to the dis-
placed configuration assumed in Step 1. Use this force
for design of the bracing.
3. Verify that deformations (including bracing deformation
due to the force calculated in Step 2) are within the limits
assumed in Step 1.
The structure shown in Fig. 1 can be used to illustrate the
calculation of bracing force corresponding to an assumed
geometry (Step 2 of the proposed procedure). A compression
member, which could represent a column or a truss chord, is
braced laterally at several locations. The brace locations and
the restraining forces supplied by the bracing are indicated by
horizontal arrows. The bracing force that is to be determined
is denoted as F. The member is considered to be hinged at the
brace locations. The hinge assumption is not necessary for the
validity of the procedure; however, it simplifies the calcula-
R. Shankar Nair, PhD, PE is a principal with the architecture/
engineering firm of RTKL Associates Inc. in Baltimore, MD.
Forces on Bracing Systems
R. SHANKAR NAIR
Fig. 1. Forces on displaced configuration of braced
compression member
FIRST QUARTER / 1992 45
tions. In a real design situation, assuming hinges at brace
points would be conservative in that it could be expected to
result in higher bracing forces. To satisfy statics at the brace
location:
F = P
a
a
P
b
b
(1)
where P
a
, P
b
,
a
, and
b
are axial forces and skew angles
(relative to a common datum) of the member segments adja-
cent to the brace point, as indicated in Fig. 1. The rules of
statics also result in the following shear forces in the bracing
system due to forces from the braced member:
S
a
= P
a
a
(2a)
S
b
= P
b
b
(2b)
where S
a
and S
b
are shear forces in the bracing system at the
locations denoted by the subscripts. These shear forces are,
simply, the transverse components of the force in the braced
member. If P
a
and P
b
are approximately equal and both are
denoted as P, the formula for F can be simplified to:
F = P(
a
b
) (3)
Use of these relationships in the complete procedure for
calculation of bracing forces for design will be illustrated in
the following example.
EXAMPLE
A column in a multistory building supports a load of approxi-
mately 5,000 kips. It is a leaning column, i.e., it is not part
of the buildings lateral load-resisting system but is braced,
through the floors, by the lateral load-resisting system. The
column will be designed as though it were hinged at the floors
(i.e., K = 1). The lateral load-resisting system will be designed
to limit interstory drift due to wind and other lateral loads to
0.0025 times the story height. For what horizontal force
should the column-to-floor connection be designed?
Figure 1 and the corresponding relationship between brac-
ing force and structure geometry are applicable to the column
in this example. The force for design of the column-to-floor
connection (which is the bracing force F in Fig. 1) may be
determined as follows:
1. Estimate the maximum out-of-plumbness of the column
and the maximum difference in out-of-plumbness be-
tween adjacent stories. The maximum out-of-plumbness
of any story of the column is taken to be as follows:
0.0020 due to erection tolerances, 0.0025 due to defor-
mation of the lateral load-resisting system (as specified),
and a negligible amount due to deformation of the floor
diaphragm and the column-to-floor connection, for a
total of 0.0045. The tilt due to erection tolerances could
be in the opposite direction in the adjacent story. The
deformation of the lateral load-resisting system might be
less in the adjacent story, but it is not likely to be zero or
in the opposite direction; as a reasonable worst-case
assumption, it will be taken as one-half the maximum
value of 0.0025. Thus, overall maximum difference in
out-of-plumbness between adjacent stories (
a
b
) is
0.0045 + 0.0020 0.0025 / 2, which amounts to a total
of 0.00525.
2. Calculate F, the maximum horizontal force at the col-
umn-to-floor connection. The maximum bracing force
F is (
a
b
) times the compression in the column, or
0.00525 times 5,000 kips, which amounts to 26 kips. Use
this force for design of the column-to-floor connection.
This is the maximum force at a given floor; maximum
values will not occur simultaneously at all floors. The
maximum horizontal shear force in the lateral load-re-
sisting system due to bracing forces from this column
would be equal to the maximum out-of-plumbness times
the column load, or 0.0045 times 5,000 kips, which
amounts to 23 kips.
3. Verify that the actual maximum out-of-plumbness and
difference in out-of-plumbness between adjacent stories
will not be greater than the assumed values. Check that
the deformations due to all design loads, including the
bracing forces calculated in Step 2, are within the limits
assumed in Step 1.
For simplicity, the calculations in this example were car-
ried out at service loads; the deformations considered were
those that were expected to occur under unfactored service
loads. To obtain consistent margins of safety, it would be more
appropriate to calculate bracing forces on the basis of ex-
pected deformations due to factored loads. In this example,
the column tilt due to interstory deformation of the lateral
load-resisting system under factored loads could be taken as
0.0035 (instead of 0.0025 at service loads); out-of-plumbness
due to erection tolerances would be unchanged, and the
overall maximum value of (
a
b
) would be 0.00575, which
results in a column-floor bracing force of 0.00575 times the
column load.
This example was a particularly simple application of the
proposed procedure for calculating bracing forces, since the
column-floor bracing force in a multistory building is not
likely to have a significant effect on the displaced geometry
of the structure. (Deformation of the buildings lateral load-
resisting system due to column bracing effects is likely to be
much smaller than the deformation due to wind or other
external loading.) In other applications, such as lightly braced
truss chords, it may be necessary, sometimes, to go back to
Step 1 with a new and more severe estimate of displaced
shape after completing one cycle of the three steps.
SUMMARY AND CONCLUSIONS
A simple technique for determining forces on bracing systems
has been proposed. The procedure is approximate; however,
it is adequate for design since it yields a bounded solution that
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 46
can be verified to ensure that actual forces on the bracing will
not be greater than the values indicated by the proposed
method.
As an example of the use of the proposed technique,
bracing requirements for a column in a multistory building
were studied. The horizontal restraining force for design of
the column-to-floor connection was found to be about 0.6
percent of the load in the column, based on certain assumed
erection tolerances and limits on interstory drift due to lateral
load.
While this example was intended only for illustrative pur-
poses, similar studies of this and other bracing situations
with plausible extreme values of the factors that determine
the resultscould be used to establish general rules for the
design of common types of bracing systems.
FIRST QUARTER / 1992 47
Engineering
J ournal
AMERICAN INSTITUTE OF STEEL CONSTRUCTION, INC.
Page 49: M. Elgaaly, W. Davids and H. Dagher
Non-Slender Single Angle Struts
Page 59: Seshu Madhavarao Adluri and
Murty K. S. Madugula
Eccentrically Loaded Steel Single Angle Struts
Page 67: Duane S. Ellifritt, Gregory Wine,
Thomas Sputo and Santosh Samuel
Flexural Strength of WT Sections
Page 75: Howard I. Epstein
An Experimental Study of Block Shear Failure of
Angles in Tension
2th Quarter 1992/ Volume 29, No. 2
INTRODUCTION
A literature search indicated a lack of test results regarding
non-slender single angle struts. The primary objective of this
paper is to present and discuss the results of the tests con-
ducted by the authors on non-slender single angle compres-
sion members. These angle members have equal legs and
were tested to failure as part of a three-dimensional truss.
The paper briefly describes the authors experimental pro-
gram. The method of calculation of the member forces from
the strain readings is discussed. The test results are given and
six failure modes are identified. These failure modes depend
on the member slenderness ratio, the angle leg width/thick-
ness ratio, the end connection detail, and the eccentricity of
the applied load. These failure modes can be generally clas-
sified as global with no appreciable local failures or local
failures which triggered global failures in some cases.
Finally, the design rules given by the AISC Specification
for Structural Steel Buildings
13
and the ASCE Manual 52 for
the Design of Steel Transmission Towers
4
are evaluated.
EXPERIMENTAL PROGRAM
The number of tests on slender members is sufficient to permit
accurate recommendations for design. However, there is not
enough data to allow accurate design recommendations for
non-slender members. In addition, many of the published
tests do not reflect actual end conditions. The testing program
conducted by the authors directly addresses the lack of data
regarding non-slender single angle struts, while attempting to
model actual end conditions as closely as possible.
Test Specimens: Fifty single-angle members, with equal
legs, were tested as part of a truss. The tests included single
and double bolted end connections. The selection of member
sizes was based on the capacity of the truss and the need to
cover a slenderness ratio range from 60 to 120. Table 1 lists
the characteristics and numbers of the test specimens chosen.
Test Apparatus and Instrumentation: The three-dimen-
sional truss used to test each specimen is shown in Figs. 1 and
2. The truss was designed so that the target angle would fail
first without introducing significant deformations in the re-
mainder of the truss. Following each test, only the target angle
was replaced, allowing multiple tests to be conducted in the
same setting. Load was applied via two 100 kip capacity
hydraulic jacks which allowed the load on each side of the
truss to be kept balanced. Each specimen was monitored with
eight linear strain gages and displacements were measured in
two orthogonal directions at the center of the specimens. In
addition, each hydraulic jack had a corresponding load cell
and digital readout to allow visual monitoring of the load
during the test. All data was recorded by a computer except
for the load cell readings which were taken manually. The
eight strain gages were located in pairs to account for differ-
ential strains through the leg thickness as shown in Fig. 3. The
displacement transducers were located as shown in Fig. 4.
Transducers 1 and 2 monitored the movement of the center
of the specimen relative to the reaction frame, and transducers
3 and 4 measured the movement of the top and bottom joints
of the specimen relative to the reaction frame. Based on the
four displacement readings, the displacements at the center
of the specimen in two orthogonal directions can be deter-
mined. It should be noted that it was assumed that the truss
did not deform out-of-plane and no provisions were made to
measure the torsional rotation at the center of the angle.
Calculation of Member Forces from Strain Readings:
The method used to calculate member forces from strain
readings involves numerical integration of the stress over the
crosssectional area and was developed to handle the inelastic
failures encountered for the specimens tested. An advantage
of this method is that it easily allows the inclusion of residual
stresses in the analysis. This is accomplished by combining
M. Elgaaly is professor, W. Davids is graduate assistant, and
H. Dagher is associate professor at the University of Maine,
Orono, ME.
Non-Slender Single Angle Struts
M. ELGAALY, W. DAVIDS and H. DAGHER
Fig. 1. Picture of truss.
SECOND QUARTER / 1992 49
the residual stress diagram with the stress distribution calcu-
lated from the measured strains, and using elastic-perfectly-
plastic material properties. The residual stress distribution
shown in Fig. 5 was assumed. A sensitivity analysis was
performed where the maximum value of the residual stress
was varied from 0 to 0.3F
y
where F
y
is the actual yield stress
of the specimen. It was found that the effect on the calculated
axial force was on the order of five percent or less for most
of the specimens tested. To provide a check on the accuracy
of the axial force calculated as described above, two compres-
sion tests were conducted in a Baldwin testing machine. The
ends were bolted in the same manner as the specimens tested
in the truss, and eight strain gages were mounted on both
angles. For each test, the calculated axial load was compared
with the actual applied load which was read directly from the
machine load indicator. The calculated failure load was two
percent below the actual applied load in one case and was
seven percent below the actual applied load in the other. Both
of these values are within the range of experimental error.
EXPERIMENTAL RESULTS
The failure loads and the observed failure modes will be
discussed. For the purpose of presenting and discussing the
results, the tests have been grouped into ten categories as
shown in Table 1.
Failure Modes: The first failure mode involves local buck-
ling of the connected leg. This local buckling is coupled with
torsional buckling or followed by flexural buckling about
Table 1.
Test Specimens
Group Size L / r End Conditions Test Nos.
1
2
3
4
5
1
3
4
1
3
4
1
8
1
3
4 1
3
4
3
16
2 2
1
8
2 2
3
16
2
1
2
2
1
2
3
16
98
99
85
86
87
double bolt
double bolt
double bolt
double bolt
double bolt
1, 2, 3, 4, 5
6, 7, 8, 33, 35
9, 10, 11, 12, 13
20, 21, 22, 43, 44
18, 19, 50, 51, 52
6
7
8
9
10
1
3
4
1
3
4
1
8
1
3
4
1
3
4
3
16
2 2
1
8
2 2
3
16
2
1
2
2
1
2
3
16
92
93
80
81
65
single bolt
single bolt
single bolt
single bolt
single bolt
53, 54, 55, 56, 57
23, 24, 35, 36, 37
26, 27, 28, 38, 39
29, 31, 40, 41, 42
45, 46, 47, 48, 49
Fig. 2. Location of target angle.
Fig. 3. Location of strain gages. Fig. 4. Transducer locations.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 50
either the geometric or the minor axis; the first will be
classified as LT and the other two as LG and LM, respec-
tively. Most of the local buckling occurred near the bolt hole.
It is important to note that this could be due to the stress
concentration at this location. Some local buckling, however,
occurred away from the connection near the middle of the
member. The photographs in Figs. 6 and 7 show LT and LG
failures for specimens 10 and 47, respectively. The second
failure mode is global buckling without any appreciable local
buckling. This second failure mode can be divided into three
Fig. 5. Assumed residual stress distribution.
Fig. 6. LT failureSpecimen 10.
Fig. 7. LG failureSpecimen 47.
Fig. 8. FT failureSpecimen 24.
SECOND QUARTER / 1992 51
types of failure. The first is a minor axis flexural buckling
failure (referred to as FM), the second is a geometric axis
flexural buckling failure (referred to as FG), and the third is
a minor axis flexural buckling coupled with torsional buck-
ling (referred to as FT). The photograph shown in Fig. 8
shows FT failure for member 24. Member forces vs. displace-
ment and vs. strain for two members are given in Figs. 9 and
10. Member 34 (Fig. 9) failed primarily in a global mode,
while member 9 (Fig. 10) failed primarily due to local buck-
ling of the angle leg.
Failure Loads: Tables 2 and 3 list the failure loads and
modes for each individual test, and the actual dimensions and
the yield stress for each specimen. The tables are organized
in the order of the previously mentioned groups.
As can be noted from the tables, groups 1, 3, 5, 6, 8, and
10 failed basically in the local mode while groups 2, 4, 7, and
9 failed in the flexural global mode. The angle leg
width/thickness ratios for the groups, which failed in the
flexural global mode, meet the AISC requirements to exclude
local leg buckling. There are variations in the failure loads
within each group. These variations are within 5 to 14 percent
above and 3 to 18 percent below the mean within each group,
and are within the accuracy limit expected from the test
results. For the purpose of analyzing the differences in failure
loads between groups, a variable n, which is defined as the
fraction of the yield stress which would exist over the entire
cross-section if the failure load was applied concentrically,
was calculated. This facilitates the accounting for the effect
of variations in area and yield stress. Due to the torsional
effects as well as the effect of the eccentricity of the load, the
n values are lower than what they would be for concentrically
loaded members without torsion.
Fig. 9. Member force vs. strain and displacement Specimen 34.
Fig. 10. Member force vs. strain and displacement Specimen 42.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 52
CURRENT DESIGN PRACTICE
In the United States, two documents address the design of
single angle compression members; namely the AISC LRFD
and ASD Specification for Structural Steel Buildings
13
and
the ASCE Manual 52 for the Design of Steel Transmission
Towers.
4
Both methods will be briefly described, and the
results obtained by applying these methods will be compared
with the test results.
ASCE MANUAL 52: The angle is always considered to
be an axially loaded member; the end restraint effect (for
slender members) and the load eccentricity (for non-slender
members) are accounted for by the use of an effective slen-
derness ratio, (KL/r). The manual gives six formulas to cal-
culate KL/r, three formulas are for non-slender members
L/r < 120, namely for concentric loading at both ends, con-
centric loading at one end and eccentric at the other, and for
eccentric loading at both ends. The other three formulas are
for slender members L/r > 120, where elastic buckling pre-
vails and rotational end restraint conditions control the de-
sign. One formula applies when the member is unrestrained
against rotation at both ends, the second when the member is
restrained at one end and unrestrained at the other, and the
third applies when both ends are restrained. Local buckling
Table 2.
Tests Results for Double Bolted Specimens
Test
(1)
Dimensions
b / t
(4)
Fy
(ksi)
(5)
76 Fy
(6)
Failure
Mode
(7)
Failure
Load
(kips)
(8)
n*
(9)
Width
(in.)
(2)
Thickness
(in.)
(3)
1
2
3
4
5
1.731
1.720
1.732
1.733
1.735
0.139
0.141
0.136
0.140
0.135
12.45
12.20
12.74
12.38
12.85
49.9
52.7
49.5
50.0
49.4
10.76
10.47
10.80
10.75
10.81
LG
LG
LM
LM
LG
11.07
14.87
14.30
13.86
13.08
0.480
0.607
0.638
0.595
0.588
6
7
8
33
34
1.762
1.767
1.767
1.768
1.794
0.199
0.194
0.198
0.196
0.197
8.85
9.11
8.92
9.02
9.11
47.6
48.7
47.7
51.2
49.7
11.02
10.89
11.00
10.62
10.78
FM
FM
FG
FM
FM
22.08
21.81
21.03
19.22
18.03
0.701
0.691
0.667
0.573
0.543
9
10
11
12
13
1.971
1.973
1.974
2.016
1.967
0.133
0.131
0.135
0.131
0.133
14.82
15.06
14.62
15.39
14.79
47.0
46.4
47.1
49.7
47.8
11.09
11.16
11.07
10.78
10.99
LT
LT
LT
LT
LT
11.55
10.98
14.50
11.87
14.50
0.485
0.473
0.598
0.467
0.600
20
21
22
43
44
1.992
1.987
1.985
2.001
2.008
0.200
0.202
0.195
0.200
0.198
9.96
9.84
10.18
10.00
10.17
47.4
45.8
47.6
45.8
45.5
11.04
11.23
11.02
11.23
11.27
FT
FT
FT
FT
FT
21.91
19.85
21.27
19.08
18.45
0.611
0.569
0.607
0.548
0.538
18
19
50
51
52
2.487
2.483
2.504
2.508
2.512
0.199
0.199
0.203
0.200
0.209
12.50
12.48
12.33
12.54
12.02
45.7
47.5
48.8
47.5
47.8
11.24
11.03
10.88
11.03
10.99
LT
LT
LT
LT
LT
25.33
24.76
26.50
24.95
26.10
0.583
0.549
0.557
0.545
0.543
Key to Failure Modes
LG: local buckling of the connected leg followed by flexural geometric axis buckling
LM: local buckling of the connected leg followed by flexural minor axis buckling
LT: local buckling of the connected leg followed by torsional buckling
FG: flexural geometric axis buckling
FM: flexural minor axis buckling
FT: flexural minor axis buckling coupled with torsional buckling
* n =
FailureLoad
Fy Area
NOTE: 1 in. = 25.4 mm 1 ksi = 6.895 MPa 1 kip = 4.448 kN
SECOND QUARTER / 1992 53
of the leg is considered by calculating a local buckling stress
F
cr
. Finally, the axial compressive stress F
a
is calculated based
on KL/r, F
cr
, and the yield stress F
y
.
AISC Specifications: Currently there are two versions of
the AISC specification. One version is the Load Resistance
Factor Design (LRFD), and the second is the Allowable Stress
Design (ASD). The concepts of design of the concentrically
loaded single-angle strut are basically the same in the LRFD
and ASD specifications. An equivalent slenderness ratio is
calculated taking the effect of the angle leg width/thickness
ratio into consideration. The nominal axial load or the allow-
able axial stress is then calculated. The calculation is based
on flexural and flexural-torsional buckling, and the smaller
value is used.
Most single angle struts are eccentrically loaded and the
effect of biaxial bending must be considered by using the
appropriate interaction equation from Chapter H, in both the
LRFD and ASD specifications. In the case of the LRFD
Specification, when calculating the nominal bending mo-
ments, the limiting extreme fiber flexural stress is usually
assumed to be equal to the yield stress. In the case of the ASD
Specification the allowable bending stresses are calculated
with due consideration of the member lateral stability.
Evaluation of the Design Methods: Both the AISC LRFD
Specification, and Manual 52 are based on limit state design.
Hence, the nominal loads without any reduction can be com-
pared directly with the experimental failure loads. The test
specimens nominal loads as predicted by the AISC LRFD
Table 3.
Tests Results for Single Bolted Specimens
Test
(1)
Dimensions
b / t
(4)
Fy
(ksi)
(5)
76 Fy
(6)
Failure
Mode
(7)
Failure
Load
(kips)
(8)
n*
(9)
Width
(in.)
(2)
Thickness
(in.)
(3)
53
54
55
56
57
1.749
1.747
1.754
1.749
1.751
0.133
0.132
0.136
0.135
0.136
13.15
13.23
12.90
12.96
12.87
51.2
49.5
51.2
51.0
52.2
10.62
10.80
10.62
10.64
10.52
LT
LT
LT
LT
LT
10.80
9.96
10.07
10.42
9.89
0.471
0.453
0.429
0.450
0.414
23
24
35
36
37
test data inadequatefailure load not reached
1.788
1.769
1.778
1.776
0.195
0.202
0.207
0.190
9.17
8.76
8.59
9.35
49.2
49.3
49.8
50.4
10.84
10.82
10.77
10.71
FT
FT
FT
FT
15.16
16.96
17.49
13.49
0.467
0.511
0.507
0.419
26
27
28
38
39
1.985
1.976
2.001
1.967
0.143
0.138
0.145
0.139
13.88
14.32
13.80
14.15
49.6
48.1
51.7
50.8
10.79
10.96
10.57
10.66
LT
LT
LT
LT
10.26
8.74
9.53
11.21
0.378
0.345
0.330
0.418
local failure affected strain readingstest data ignored
29
31
40
41
42
test data inadequatefailure load not reached
1.984
1.998
1.995
1.998
0.200
0.196
0.197
0.190
9.92
10.19
10.13
10.52
49.2
46.8
46.0
46.1
10.84
11.11
11.21
11.19
FT
FT
FT
FT
19.33
15.98
18.22
18.10
0.521
0.458
0.530
0.543
45
46
47
48
49
2.480
2.501
2.505
2.498
2.483
0.202
0.203
0.197
0.194
0.198
12.28
12.32
12.72
12.88
12.54
47.4
48.1
48.1
47.7
49.8
11.04
10.96
10.96
11.00
10.77
LT
LT
LG
LT
LT
19.64
19.49
20.19
21.07
19.94
0.431
0.416
0.443
0.474
0.424
Key to Failure Modes
LG: local buckling of the connected leg followed by flexural geometric axis buckling
LM: local buckling of the connected leg followed by flexural minor axis buckling
LT: local buckling of the connected leg followed by torsional buckling
FG: flexural geometric axis buckling
FM: flexural minor axis buckling
FT: flexural minor axis buckling coupled with torsional buckling
* n =
FailureLoad
Fy Area
NOTE: 1 in. = 25.4 mm 1 ksi = 6.895 MPa 1 kip = 4.448 kN
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 54
Specification (with and without the effect of the load eccen-
tricity), and Manual 52 are given in Tables 4 and 5. In the
same tables the experimental failure loads are given.
The predicted allowable loads for the test specimens (with
and without the effect of the load eccentricity) based on the
AISC ASD Specification are given in Tables 6 and 7. In the
same tables the actual failure loads and the corresponding
factors of safety (Failure Load/Allowable Load) are given.
As can be noted from Tables 4 and 5, the nominal loads
calculated from Manual 52 are very close to or exceed the
actual failure loads. A similar conclusion can be reached by
examining the AISC LRFD Specification nominal loads for
the concentrically loaded struts. When the eccentricity of the
applied loads is taken into consideration, the AISC LRFD
Specification nominal loads are very conservative. As can be
noted from Tables 6 and 7, the safety factors are generally low
if one ignores the effect of the load eccentricity. However,
they are high if the effect of the load eccentricity is taken into
consideration in the manner described earlier.
One possible way to resolve the overdesign in the AISC
specifications is to consider the end restraint effect by using
an effective length factor less than one. Another issue, which
can be resolved more easily to get rid of the conservatism, is
not to add the worst case bending stresses due to load eccen-
tricities that do not occur at the same point of the angle cross
section as suggested in the AISC Manual. It is more correct
to combine the axial and bending stresses at the angle tips and
heel and then to use the interaction equation to determine the
allowable load based on the most critical point.
SUMMARY AND CONCLUSIONS
In this paper a test program for non-slender single angle
members with equal legs, utilizing a three-dimensional truss,
was briefly described. The test results were given and ana-
Table 4.
AISC-LRFD Predicted Failure Loads
for Double Bolted Specimens
Test
(1)
b / t
(2)
L / r
(3)
Actual
Failure
Load
(kips)
(4)
Manual
52
Load
(kips)
(5)
AISC-LRFD
Failure Load
e = 0*
(kips)
(6)
e 0*
(kips)
(7)
1
2
3
4
5
12.45
12.20
12.74
12.38
12.85
98
98
98
98
98
11.07
14.87
14.30
13.86
13.08
10.90
10.78
10.76
11.07
10.75
11.03
11.17
10.77
11.15
10.72
5.32
5.47
5.22
5.38
5.18
6
7
8
33
34
8.85
9.11
8.92
9.02
9.11
99
99
99
99
99
22.08
21.81
21.03
19.22
18.03
15.90
15.89
15.90
15.67
16.39
16.04
15.90
16.09
16.31
16.84
7.02
7.04
7.03
7.28
7.41
9
10
11
12
13
14.82
15.06
14.62
15.39
14.79
85
85
85
85
85
11.55
10.98
14.50
11.87
14.50
13.38
13.13
13.53
13.62
13.24
13.31
13.02
13.60
13.87
13.36
6.24
6.13
6.36
6.61
6.29
20
21
22
43
44
9.96
9.84
10.18
10.00
10.17
86
86
86
86
86
21.91
19.85
21.27
19.08
18.45
20.01
19.91
19.34
20.09
19.96
21.27
21.00
20.67
21.12
21.00
8.99
8.74
8.78
8.79
8.75
18
19
50
51
52
12.50
12.48
12.33
12.54
12.02
67
67
67
67
67
25.33
24.76
26.50
24.95
26.10
28.42
28.38
29.53
28.73
30.23
30.72
31.31
32.65
31.71
33.20
12.66
12.96
13.60
13.25
13.74
NOTE: 1 in. = 25.4 mm 1 kip = 4.448 kN
*e represents the eccentricity of the applied load
SECOND QUARTER / 1992 55
lyzed. Comparisons were made between the actual failure
loads and those predicted using methods given in the ASCE
Manual 52 for Steel Transmission Towers and the AISC
Specification for Steel Buildings. The test results reported in
this paper indicate that current design methods for nonslender
single angle members are not adequate.
ACKNOWLEDGMENTS
This study was partially funded by Bonneville Power Admini-
stration and Ontario Hydro. Funds were received from the
University of Maine in the form of release time for the first
two authors and graduate assistantship for the third author.
Maine Cascade Iron Works of Clinton, ME supplied the
testing truss as a donation to the University of Maine.
REFERENCES
1. Load and Resistance Factor Design Specification for
Structural Steel Buildings, AISC, 1986.
2. Specification for Structural Steel Buildings, Allowable
Stress Design and Plastic Design, AISC, 1989.
3. Specification for Allowable Stress Design of Single-Angle
Members, AISC Manual of Steel Construction, 9th ed.,
1989.
4. ASCE Manual 52, Guide for Design of Steel Transmission
Towers, 2nd ed., 1988.
Table 5.
AISC-LRFD Predicted Failure Loads
for Single Bolted Specimens
Test
(1)
b / t
(2)
L / r
(3)
Actual
Failure
Load
(kips)
(4)
Manual
52
Load
(kips)
(5)
AISC-LRFD
Failure Load
e = 0*
(kips)
(6)
e 0*
(kips)
(7)
53
54
55
56
57
13.15
13.23
12.90
12.96
12.87
92
92
92
92
92
10.80
9.96
10.07
10.42
9.89
11.35
11.25
11.62
11.62
11.64
11.70
11.44
12.06
11.88
12.09
5.56
5.42
5.70
5.62
5.75
23
24
35
36
37
test data inadequatefailure load not reached
9.17
8.76
8.59
9.35
93
93
93
93
15.16
16.96
17.49
13.49
16.90
17.02
17.57
16.30
17.82
17.97
18.67
17.30
7.62
7.61
7.91
7.50
26
27
28
38
39
13.88
14.32
13.80
14.15
80
80
80
80
10.26
8.74
9.53
11.21
15.15
14.46
15.76
14.59
15.57
14.90
15.97
15.27
7.17
6.84
7.52
7.08
local failure affected strain readings
29
31
40
41
42
test data inadequatefailure load not reached
9.92
10.19
10.13
10.52
81
81
81
81
19.33
15.98
18.22
18.10
20.83
20.49
20.34
19.67
22.84
22.14
21.97
21.33
9.43
9.07
9.01
8.81
45
46
47
48
49
12.28
12.32
12.72
12.88
12.54
65
65
65
65
65
19.64
19.49
20.19
21.07
19.94
29.38
30.12
29.29
28.61
28.99
32.16
32.57
31.61
30.99
32.39
13.28
13.57
13.29
13.04
13.61
NOTE: 1 in. = 25.4 mm 1 kip = 4.448 kN
*e represents the eccentricity of the applied load
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 56
Table 6.
AISC Allowable Stress Predicted Failure Loads
for Double Bolted Specimens
Test
(1)
Failure
Load
(kips)
(2)
e = 0* e 0*
Ra
(kips)
(3)
Safety
Factor
(4)
Ra
(kips)
(5)
Safety
Factor
(6)
1
2
3
4
5
11.07
14.87
14.30
13.86
13.08
6.76
6.83
6.60
6.83
6.57
1.64
2.18
2.17
2.03
1.99
2.91
2.99
2.84
2.94
2.83
3.80
4.97
5.04
4.71
4.62
6
7
8
33
34
22.08
21.81
21.03
19.22
18.03
9.83
9.74
9.86
9.98
10.32
2.25
2.24
2.13
1.93
1.75
3.93
3.92
3.94
4.07
4.16
5.62
5.56
5.34
4.72
4.33
9
10
11
12
13
11.55
10.98
14.50
11.87
14.50
8.08
7.89
8.26
8.41
8.11
1.43
1.39
1.76
1.41
1.79
3.30
3.22
3.37
3.43
3.31
3.50
3.41
4.30
3.46
4.38
20
21
22
43
44
21.91
19.85
21.27
19.08
18.45
12.98
12.80
12.61
12.86
12.78
1.69
1.55
1.69
1.48
1.44
5.01
4.87
4.91
4.93
4.90
4.37
4.08
4.33
3.87
3.77
18
19
50
51
52
25.33
24.76
26.50
24.95
26.10
18.28
18.66
19.44
18.85
20.20
1.39
1.33
1.36
1.32
1.29
6.86
7.00
7.35
7.13
7.52
3.69
3.54
3.61
3.50
3.47
*e represents the eccentricity of the applied load
SECOND QUARTER / 1992 57
Table 7.
AISC Allowable Stress Predicted Failure Loads
for SIngle Bolted Specimens
Test
(1)
Failure
Load
(kips)
(2)
e = 0* e 0*
Ra
(kips)
(3)
Safety
Factor
(4)
Ra
(kips)
(5)
Safety
Factor
(6)
53
54
55
56
57
10.80
9.96
10.07
10.42
9.89
7.16
7.00
7.39
7.28
7.41
1.51
1.42
1.36
1.43
1.33
3.00
2.92
3.08
3.05
3.10
3.60
3.41
3.27
3.42
3.19
23
24
35
36
37
test data inadequate
15.16
16.96
17.49
13.49
10.92
11.02
11.44
10.60
1.39
1.54
1.53
1.27
4.25
4.25
4.42
4.18
3.57
3.99
3.96
3.23
26
27
28
38
39
10.26
8.74
9.53
11.21
9.41
8.98
9.68
9.25
1.09
0.97
0.98
1.21
3.82
3.59
3.98
3.72
2.69
2.43
2.39
3.01
test data inadequate
29
31
40
41
42
test data inadequate
19.33
15.98
18.22
18.10
13.89
13.42
13.31
12.92
1.39
1.19
1.37
1.40
5.29
5.07
4.99
4.89
3.65
3.15
3.65
3.70
45
46
47
48
49
19.64
19.49
20.19
21.07
19.94
19.09
19.36
18.76
18.37
19.24
1.03
1.01
1.08
1.15
1.04
7.21
7.37
7.14
6.99
7.27
2.72
2.64
2.83
3.01
2.74
*e represents the eccentricity of the applied load
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 58
SUMMARY
Results of experimental data on eccentrically loaded steel
single angle struts are compared with AISC LRFD (1986) and
AISC ASD (1989) specifications. It is shown that the current
design practice is conservative and needs reevaluation with
respect to axial load-bending moment interaction formulas.
Various simplified alternative approaches for the design of
steel single angle struts are discussed and results presented.
INTRODUCTION
Steel single angles are extensively used in several kinds of
structures. An important application of these angles in latticed
towers, trusses, etc. is to connect them by one leg to carry
compressive loads. This loads the member in axial compres-
sion with end moments due to the eccentric connection. The
resulting problem is too complex to be analyzed precisely,
because of the eccentricity of load with respect to both
principal axes and the uncertain nature of the end restraints
which would render the problem of finding an effective length
factor difficult. Traditionally, various national design prac-
tices on eccentrically loaded single angle struts differed from
each other very widely. The slenderness ratios of eccentrically
loaded single angle struts are modified in ASCE Manual No.
52 (Am. Soc. of Civil Engrs., 1988) to make use of the
formulas applicable to concentrically loaded struts. Canadian
tower design practice CSA-S37 (Canadian Standards Asso-
ciation, 1986) and British practice (British Standards Institu-
tion, 1985) is to ignore the eccentricity and limit the strength
of eccentrically loaded single angle struts to a certain percent-
age of the strength of corresponding concentric axially loaded
struts. Such methods simplify the design of these members
but make the design of single angle struts less rational than
would sometimes be desirable. However, similar design sim-
plifications are not allowed in AISC LRFD (1986), AISC
ASD (1989) and CSA-S16.1 (Canadian Standards Associa-
tion, 1989) specifications. The AISC LRFD provisions are as
given below:
Case 1: For
P
u
c
P
n
0.2,
P
u
c
P
n
+
8
9
M
ux
b
M
nx
+
M
uy
b
M
ny
1.0 (1)
Case 2: For
P
u
c
P
n
< 0.2,
P
u
2
c
P
n
+
M
ux
b
M
nx
+
M
uy
b
M
ny
1.0 (2)
where
P
u
= required compressive strength
P
n
= nominal compressive strength for concentric axial load
M
u
= required flexural strength
M
n
= nominal flexural strength
c
= resistance factor for compression = 0.85
b
= resistance factor for flexure = 0.90
These formulas take into consideration the load-moment
interaction effect on the section and the amplification of the
end moments due to P effect. The values for moment
interaction factors are obtained from experimental investiga-
tion on 82 sidesway frames made of doubly symmetric wide
flange shapes (AISC LRFD, 1986). The stability and strength
checks for the member are essentially combined in the above
formulas. The basis for LRFD provisions in general is the first
order probabilistic design procedure (Ravindra and Galam-
bos, 1978). The basic form of the above formulas is derived
from beam-column theory and is adjusted by using experi-
mental observations to achieve an acceptable level of com-
plexity. The load factors and resistance factors are arrived at
by using a uniform probability of failure level for the full
range of basic variables for all member types. In the case of
beam-columns (as in the case of several stuctural compo-
nents), the accepted level of safety corresponds to = 3.0,
where is the safety index. This value is used to estimate the
load and resistance factors for the member for a chosen set of
design formulas.
Interaction formulas similar to those in LRFD are also
provided in AISC ASD (1989) Specification. For single angle
members, the ASD Specification gives special provisions for
calculating the allowable bending stress about principal axes
and geometric axes. Such special treatment is not given for
single angle members in LRFD Specification. As a guide, the
LRFD Manual gives an example for the design of a single
angle strut under eccentric loading in which the critical bend-
Eccentrically Loaded Steel Single Angle Struts
SESHU MADHAVA RAO ADLURI and MURTY K. S. MADUGULA
Seshu Madhava Rao Adluri is research assistant, and Murty
K. S. Madugula is professor, Department of Civil and Environ-
mental Engineering, University of Windsor, Windsor, Ontario,
Canada.
SECOND QUARTER / 1992 59
ing stress for the section is taken as F
y
for bending about either
of the principal axes.
The design provisions as per ASD are as follows:
f
a
F
a
+
C
mx
f
bx
1
f
a
F
ex
F
bx
+
C
my
f
by
1
f
a
F
ey
F
by
1.0 (3)
f
a
0.60F
y
+
f
bx
F
bx
+
f
by
F
by
1.0 (4)
where
F
a
= the allowable axial compression stress
F
b
= the permissible bending compression stress
F
c
= the Euler stress divided by 23/12
f
a
= the computed axial compression stress
f
b
= the computed bending compression stress
C
m
= the coefficient as specified in AISC ASD specification
Equation 4 above does not govern the design of eccentri-
cally loaded single angle struts and hence need not be ac-
counted for. As mentioned above, these formulas are derived
primarily for doubly symmetric wide flange sections. In the
case of singly symmetric sections (such as equal leg single
angles, tees, and channels) and unsymmetric sections, the
formulas lead to conservative results. This is due to the fact
that the moment ratios in the interaction formulas are evalu-
ated for the case of maximum stresses about each of the
principal axes independent of the other. This practice does not
result in any problem for the design of doubly symmetric
sections since one of the four corners is critical for moments
about both principal axes simultaneously. But for singly
symmetric sections and unsymmetric sections, the points of
maximum stress for both the principal axes moments do not
usually coincide. If the interaction equation is applied at each
of the possible critical points by evaluating the bending stress
due to the two moments simultaneously and the sum is taken
to evaluate the load capacity, the resulting loads are higher
than the load capacity computed using the present practice.
For example, a 33
1
4
-in. angle of length 36 in. shows an
increase of up to 10 percent in the calculated load capacity if
the load is placed in the first or fourth quadrants (Fig. 1) with
respect to the W-Z (principal) axes. This difference is mainly
due to the difference in principal axes coordinates of the two
points at the toes of legs (points 2 and 5 or points 4 and 6 of
Fig. 1). If the load is placed in second or third quadrants, the
increase can be more than 50 percent. The effect is even more
pronounced for unequal leg angles. Hence, it is necessary to
study the effects of the eccentricity of load on single angle
struts using the experimental results available in literature.
In the present study, results of experimental investigation
on eccentrically loaded single angle struts from three sources
are compared with the compressive strength computed ac-
cording to AISC LRFD and AISC ASD specifications. A total
of 71 test results from experimental studies are included in
the analysis. The test results of hundreds of eccentrically
loaded single angle struts available in the literature are exam-
ined in detail and only 71 specimens are considered for the
present study as these are the only specimens with clearly
known end restraints and effective lengths about both princi-
pal axes and clearly defined load application points. The
relevant information about the experimental investigations
included in the study is as follows:
1. Wakabayashi and Nonaka (1965): Tests were conducted
on five series of mild steel 90907 mm (3.543.54
0.276 in.) angle specimens with slenderness ratios of 20,
40, 60, 70, 80, 90, 100, 110, 130, and 150, in each series.
Two of the series had loading on the major principal axis
of the cross-section at an eccentricity with respect to
minor axis equal to the minimum radius of gyration of
17.7 mm (0.697 in.). (In one series, the load was away
from the shear center, while the other series had load
towards the shear center.) The third series had eccentric
load on the minor principal axis at an eccentricity with
respect to major axis of 17.4 mm (0.685 in.) equal to
one-half of the maximum radius of gyration. The next
series had eccentricity about both principal axes (eccen-
tricities equal to 17.7 mm and 17.4 mm with respect to
minor and major principal axes respectively). The re-
maining specimens were concentric axially loaded
struts. The material used in the investigation had a
guaranteed minimum yield stress of 225 MPa (32.6 ksi).
The end supports were designed to eliminate constraints
against rotation and twisting at the ends of the speci-
Fig. 1. Cross-section of an angle showing possible
critical points 2 to 6 (load is applied at point 1).
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 60
mens. Complete description of the specimens is pro-
vided in Table 1(a).
2. Mueller and Erzurumlu (1983): Test results of fourteen
33
1
4
-in. and two 53
1
4
-in. single angle specimens
are included in the present study. The specimens had ball
joints at the ends to permit free rotation in any direction.
The slenderness ratios were approximately 60, 120, and
200. The details of the specimens selected for the present
study are given in Table 1(b).
3. Ishida (1968): Tests were conducted by Ishida on seven
high strength steel angles of size 75756 mm (33
1
4
-
in.). Load was applied on the major principal axis to-
Table 1a.
Results of Experimental Study on Eccentrically Loaded Single Angles
Wakabayashi & Nonaka (1965)
SPECIMEN #
D
in.
B
in.
t
in.
KL
r
Ey
ksi
Z-eccen.
in.
W-eccen.
in.
P-test
kips
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
Ser.
2- 20
2- 40
2- 60
2- 70
2- 80
2- 90
2-100
2-110
2-130
2-150
3- 20
3- 40
3- 60
3- 70
3- 80
3- 90
3-100
3-110
3-130
3-150
4- 20
4- 40
4- 60
4- 70
4- 80
4- 90
4-100
4-110
4-130
4-150
5- 20
5- 40
5- 60
5- 70
5- 80
5- 90
5-100
5-110
5-130
5-150
1- 20
1- 40
1- 60
1- 70
1- 80
1- 90
1-100
1-110
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.543.540.276
3.453.540.276
19.4
39.8
59.7
69.6
79.5
89.5
99.4
109.4
129.3
149.2
19.4
39.8
59.7
69.6
79.5
89.5
99.4
109.4
129.3
149.2
19.4
39.8
59.7
69.6
79.5
89.5
99.4
109.4
129.3
149.2
19.4
39.8
59.7
69.6
79.5
89.5
99.4
109.4
129.3
149.2
19.4
39.8
59.7
69.6
79.5
89.5
99.4
109.4
46.9
46.9
46.9
46.9
46.9
46.9
46.9
46.9
46.9
46.9
46.9
46.9
46.9
46.9
46.9
46.9
46.9
46.9
46.9
46.9
45.5
45.5
45.5
45.5
45.5
45.5
45.5
45.5
45.5
45.5
42.7
42.7
42.7
42.7
42.7
42.7
42.7
42.7
42.7
42.7
44.0
44.0
44.0
44.0
44.0
44.0
44.0
44.0
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
0.697
000.0
000.0
000.0
000.0
000.0
000.0
000.0
000.0
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.685
0.685
0.685
0.685
0.685
0.685
0.685
0.685
0.685
0.685
0.685
0.685
0.685
0.685
0.685
0.685
0.685
0.685
0.685
0.685
0.000
0.000
0.000
0.000
0.000
0.000
0.000
0.000
43.7
38.6
32.5
29.9
28.2
25.8
23.6
21.6
17.8
15.5
51.6
41.7
35.8
33.4
31.0
27.8
26.1
21.6
17.8
15.5
50.9
48.9
46.5
43.7
45.3
46.2
42.5
43.3
34.2
25.8
37.8
31.6
27.9
25.4
23.8
22.1
21.7
20.7
18.2
14.7
79.0
79.0
76.7
78.0
70.6
62.4
59.0
51.1
SECOND QUARTER / 1992 61
wards the shear center at an eccentricity with respect to
minor principal axis equal to the minimum radius of
gyration. Slenderness ratios of specimens varied from
20 to 100. Complete description of the selected speci-
mens is provided in Table 1(c).
All the eccentricities given above are with respect to the
principal axes as shown in Fig. 1.
The main aim of the present paper is to bring to the attention
of the designers the degree of conservatism involved in the
design of eccentrically loaded steel single angle struts. The
Fig. 3. Load ratio vs. moment ratio for test specimens as per
AISC LRFD provisions with critical bending stress computed
from formulas adapted from AISC ASD specification.
Fig. 2. Load ratio vs. moment ratio for test specimens
as per AISC LRFD provisions with critical bending
stress equal to yield stress.
Table 1b.
Results of Experimental Study on Eccentrically Loaded Single Angles
Mueller & Erzurumlu (1983)
SPECIMEN #
D
in.
B
in.
t
in.
KL
r
Fy
ksi
Z-eccen.
in.
W-eccen.
in.
P-test
kips
S3 BB 36-1
S3 BB 36-2
S1 BB 36-2
S2 BB 36-3
T2 BB 50-1
T2 BB 36-1
T1 BB 50-1
T3 BB 50-1
T3 BB 36-1
S3 BB 50-1
SR3 BB 36-1
TR3 BB 5011
TR3 BB 50-1
TR2 BB 50-1
T4 BB 36-1
T4 BB 36-2
3.003.000.250
3.003.000.250
3.003.000.250
3.003.000.250
3.003.000.250
3.003.000.250
3.003.000.250
3.003.000.250
3.003.000.250
3.003.000.250
3.003.000.250
3.003.000.250
3.003.000.250
3.003.000.250
3.005.000.250
3.005.000.250
60.8
60.8
111.4
192.4
192.4
192.4
111.4
60.8
60.8
60.8
60.8
60.8
60.8
192.0
77.4
77.4
54.8
54.8
54.8
50.6
53.8
54.8
53.8
53.8
54.8
56.4
54.8
61.3
61.3
51.0
48.1
48.1
0.200
0.200
0.200
0.200
0.086
0.086
0.086
0.086
0.086
0.200
0.200
0.086
0.086
0.086
0.200
0.200
0.000
0.000
0.000
0.000
1.105
1.105
1.105
1.105
1.105
1.390
0.000
1.105
1.105
1.105
0.000
0.000
33.0
37.5
22.0
9.9
8.6
10.0
22.0
35.8
30.2
26.2
46.0
44.0
41.0
10.6
12.3
11.8
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 62
study was originally undertaken in order to verify a growing
feeling among some of the practising engineers that the LRFD
formulas are conservative for the design of single angles even
though the application of the formulas is quite involved in
view of the necessity for solving cubic equations.
ANALYSIS OF TEST DATA
The data described above is used to evaluate the interaction
formulas of LRFD and ASD specifications. Figures 2 through
6 show different possible ways of combining the effects of
axial load and bending moments on the steel single angle
struts for use with the current design practice. In all the
figures, the Y-axis shows the axial load ratio (P
u
/ P
n
for
LRFDFigs. 2 to 4 and f
a
/ F
a
for ASDFigs. 5 and 6). The
X-axis shows the corresponding moment ratios. The moment
ratios in Fig. 2 are calculated using the present LRFD ap-
proach with a critical bending compresive stress equal to F
y
(see example problem in AISC LRFD). Figure 3 calculates
the critical bending stress using the formulas similar to those
given in the current ASD Specification and uses the moment
ratios as per LRFD. This approach was undertaken in order
to see the effect of a more rational calculation of critical
bending stress (as per ASD formulas) when compared to the
presently used value of F
y
. Figure 4 shows results obtained
using the interaction formula at each of the possible critical
points by considering the moment capacities due to the criti-
cal bending stress at that point (calculated using the formulas
adopted from the ASD provisions) simultaneously with re-
Fig. 4. Load ratio vs. moment ratio for test specimens using
AISC LRFD provisions with critical bending stress computed
from formulas adapted from AISC ASD specification and
interaction applied at all possible critical points.
Fig. 5. Load ratio vs. moment ratio for test specimens
as per AISC LRFD provisions.
Table 1c.
Results of Experimental Study on Eccentrically Loaded Single Angles
Ishida (1968)
SPECIMEN #
D
in.
B
in.
t
in.
KL
r
Fy
ksi
Z-eccen.
in.
W-eccen.
in.
P-test
kips
SHY40-1E-1
SHY40-1E-2
SHY40-1E-3
SHY40-1E-4
SHY40-1E-5
SHY36-2E-1
SHY36-2E-2
2.972.970.255
2.952.990.255
2.962.960.256
2.942.940.260
2.942.940.253
2.952.950.255
2.952.950.252
19.8
39.5
59.6
79.9
99.7
39.7
79.5
63.9
63.9
63.9
63.9
63.9
58.8
58.8
0.586
0.586
0.583
0.580
0.581
0.583
0.583
0.000
0.000
0.000
0.000
0.000
0.000
0.000
47.4
39.1
30.5
25.6
19.4
35.6
23.4
SECOND QUARTER / 1992 63
spect to bending about both axes. The sign of the moment
ratio is taken as positive if the bending moment about the
corresponding principal axis produces compressive stress at
the point under consideration and is taken as negative other-
wise. The moment ratios due to the two bending moments are
added algebraically and the largest sum is used for plotting
the interaction diagram. Figure 5 shows the results plotted as
per the existing ASD provisions. Figure 6 shows the results
as per ASD provisions, plotted using an approach similar to
that used for plotting Fig. 4. Table 2 gives the summary of the
various comparisons.
DISCUSSION
The current interaction formulas in AISC LRFD Specification
were derived mainly for doubly symmetric sections that are
normally used in frames. But as can be seen from Figs. 2 to 6
and Table 2, these interaction formulas are highly conserva-
tive when applied to eccentrically loaded single angle struts.
Several alternatives which are not reported herein were stud-
ied to predict the strength of eccentrically loaded single angle
struts. The alternatives included approaches similar to those
adopted by different national specifications and other ap-
proaches which manipulate the interaction factors such as the
moment amplification factors. All such methods are found to
be either highly conservative or unacceptable. The simplest
approach for modifying the present formulas is to retain the
present interaction formulas in their entirety and imposing the
application of interaction at all salient points on the cross-
section. An additional benefit could be obtained simply by
changing the values of the moment interaction factors result-
ing in equations given below:
Case 1: For
P
u
c
P
n
0.5,
P
u
c
P
n
+
2
3
M
ux
b
M
nx
+
M
uy
b
M
ny
1.0 (5)
Case 2: For
P
u
c
P
n
< 0.5,
P
u
2
c
P
n
+
M
ux
b
M
nx
+
M
uy
b
M
ny
1.0 (6)
This gives an increase of nine percent on an average in
computed axial load capacity over simple interaction equa-
tion (without any modifying factors) for the test specimens
under consideration while the existing provisions give a three
percent higher axial load on an average over the load that is
computed using a simple interaction equation. The same
interaction factors are also applicable for the approaches
shown in Figs. 3 and 4. Figure 3 does not show results that
are drastically different from the results shown in Fig. 2
because for the majority of test results used in the investiga-
tion, the critical bending stress is only five percent to ten
percent lower than the yield stress F
y
although other practical
cases can have a significantly different critical bending stress.
Similarly, Fig. 4 is not very different from Fig. 3 for the data
from Wakabayashi and Nonaka (1965) and Ishida (1968)
because the load eccentricities of the test specimens are
mostly either on the principal axes or in first and fourth
quadrants with respect to the principal axes. The results for
Mueller and Erzurumlu (1983) are different in Fig. 3 and
Fig. 4 because the load point for most test cases falls narrowly
into the third quadrant. Nevertheless, Figs. 3 and 4 serve to
show that the corresponding approaches satisfy the test re-
sults. While the conservative results prove that the design is
safe, they also show that the safety margin is not uniform for
all the different types of structural members. The safety
margin for LRFD is generally measured by the reliability
index . The value effectively fixes the load and resistance
factors. For a given value of , the resistance factor could be
computed as (Bjorhovde et al. 1978)
=
R
m
R
n
e
V
r
(7)
where R
m
is the mean resistance, R
n
is the nominal resistance,
is 0.55, and V
r
is the coefficient of variation of the resistance
of the member. Using the results shown in Table 2 and known
values of other statistical properties and , reliability index
can be calculated. The calculations show a value higher
Fig. 6. Load ratio vs. moment ratio for test specimens using
AISC LRFD provisions with interaction applied at all
possible critical points.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 64
than 6.0 for the cases listed and for several cases not presented
herein. A consistently high value for the reliability index
shows that the present alternatives relying on simple variation
to the current LRFD formulas are unusually conservative
when compared to the reliability index for the other types of
members which is usually between two and four. Any further
reduction in the degree of conservatism of the sections would
warrant recourse to more complicated but exact formulas.
One such set of formulas derived for beam columns uses an
exponential format for the two moment ratios (Chen and
Atsuta, 1976 and Chen and Lui, 1987). The calibration of
these formulas involves extensive numerical integration and
comparison with test results. This has been done for the case
of I-sections in braced frames and the corresponding formulas
are given in the appendix to AISC LRFD (1986). Such for-
mulas tend to be very complicated for practical design appli-
cations and are not normally used. The alternative to such
methods is simpler variations of the existing formulas in a
more empirical sense. The present study shows the amount of
improvement possible through such methods. Any further
improvement in the formulas would most likely result in more
complicated formulas.
The calculations also show that the critical bending stress
calculated using the more rational formulas of ASD is less
Table 2.
Comparison of Compressive Strengths Calculated According to AISC
Interaction Formulas with Test Failure Loads (P_calc/P_test)
Method of
Calculation
Wakabayashi... Mueller... Ishida Total
Mean
Std.
Dev. Mean
Std.
Dev. Mean
Std.
Dev. Mean
Std.
Dev.
AISC LRFD
existing provi-
sions (Fig. 2)
0.65 0.08 0.69 0.10 0.68 0.08 0.66 0.08
Same as above
but with interac-
tion factor
changed to 2/3
0.70 0.07 0.75 0.10 0.77 0.08 0.72 0.08
AISC LRFD with
critical bending
stress as per
ASD provisions
(Fig. 3)
0.62 0.06 0.66 0.11 0.62 0.08 0.63 0.08
Same as above
but with
interaction factor
changed to 2/3
0.67 0.07 0.71 0.11 0.69 0.08 0.68 0.08
AISC LRFD with
critical bending
stress as per
ASD and with
interaction at all
critical points
(Fig. 4)
0.63 0.06 0.71 0.09 0.64 0.08 0.65 0.08
Same as above
but with
interaction factor
changed to 2/3
0.68 0.07 0.76 0.09 0.72 0.08 0.71 0.08
AISC ASD
existing provi-
sions (Fig. 5)
0.77 0.08 0.83 0.14 0.76 0.10 0.78 0.10
AISC ASD
with interaction
at all critical
points (Fig. 6)
0.79 0.07 0.90 0.12 0.79 0.10 0.81 0.10
SECOND QUARTER / 1992 65
than the normally assumed value of F
y
but not by a great
margin for test specimens under consideration.
Figures 5 and 6 show the test results as per the ASD
practice. Both the curves confirm that the ASD formulas are
good for the test cases. However, in view of the discussion
above, the approach of applying interaction at all possible
critical points is highly desirable. It may be noted that for most
practical cases, the load position is in the second and third
quadrants where the difference in the two approaches is
highly pronounced. It should also be noted that the critical
point on the section is almost invariably the point of maxi-
mum compression. The determination of the point of maxi-
mum compression needs checking at two points if the load is
placed in the first or fourth quadrants (points 2, 5 or 4, 6
respectively in Fig. 1) and at least three points if the load is
placed in second or third quadrants (points 2, 3, 5 or 3, 4, 6
respectively in Fig. 1) for every angle. This would involve
some extra computation when compared to current design
practice. This however, would lead to a noticeable economy.
CONCLUSIONS
From the above discussion, the following conclusions can be
arrived at:
1. Design interaction equations should combine the effects
of biaxial moments at all critical points separately. This
is especially so if the load is located in the second and
third quadrants of principal axes (causing compression
at heel).
2. The present AISC LRFD interaction equations are
highly conservative for eccentrically loaded single angle
struts.
3. The critical bending stress is less than the usually as-
sumed value (equal to F
y
) but is close to it for the test
specimens studied.
4. For single angle struts, the moment interaction factors
can be changed to
2
3
(from the present
8
9
) for the range
of P
u
/ P
n
between 1.0 and 0.5.
5. The present AISC ASD specifications compare very
favorably with the test results under consideration. How-
ever, it is highly desirable that the interaction is applied
at all the possible critical points.
ACKNOWLEDGEMENTS
The authors would like to express their appreciation to Drs. S. J.
Fang and S. J. Chhabra of Sargent and Lundy, Chicago, IL and
Dr. Leroy Lutz, Computerized Structural Design Inc., Milwau-
kee, WI for their suggestions. The present work is part of a
research project carried out with the financial support of Natural
Sciences and Engineering Research Council of Canada.
REFERENCES
1. American Institute of Steel Construction, 1989. Manual
of Steel ConstructionAllowable Stress Design, 9th ed.,
Chicago, IL.
2. American Institute of Steel Construction, 1986. Manual
of Steel ConstructionLoad and Resistance Factor De-
sign, 1st ed., Chicago, IL.
3. American Society of Civil Engineers, Manuals and Re-
ports on Engineering Practice No. 52, 1988. Guide for
Design of Steel Transmission Towers, 2nd ed., New York.
4. Bjorhovde, R., Galambos, T. V., and Ravindra, M. K.
1978. LRFD Criteria for Steel Beam-Columns, Journal
of Structural Division, American Society of Civil Engi-
neers, New York, Vol. 104 , No. ST9, Proc. paper 14008
pp. 13711387.
5. British Standards Institution, 1985. Structural Use of
Steel Work in Buildings, BS 5950:PART I:1985, London,
U.K.
6. Canadian Standards Association, 1986. Antennas, Towers
and Antenna-Supporting Structures, CAN/CSA-S37-
M86, Rexdale, Ontario, Canada.
7. Canadian Standards Association, 1989. Limit States De-
sign of Steel Structures, CAN/CSA-S16.1-M89, Rexdale,
Ontario, Canada.
8. Chen, W. F. and Atsuta, T. 1976. Theory of Beam-Col-
umns, Vols. 1&2, McGraw-Hill Book Co., New York.
9. Chen, W. F. and Lui, E. M. 1987. Structural Stability
Theory and Implementation, Elsevier Science Publishing
Co. Inc., New York.
10. Ishida, A., 1968. Experimental Study on Column Carrying
Capacity of SHY Steel Angles, Yawata Technical Re-
port No. 265, December, pp. 85648582 and 87618763,
Yawata lron and Steel Co. Ltd., Tokyo, Japan.
11. Mueller, W. H. and Erzurumlu, H., 1983, Behaviour and
Strength of Angles in Compression: An Experimental
Investigation, Research Report of Civil-Structural Engi-
neering, Division of Engineering and Applied Science,
Portland State University, Oregon, USA.
12. Ravindra, M. K. and Galambos, T. V. 1978. Load and
Resistance Factor Design for Steel, Journal of Structural
Division, American Society of Civil Engineers, New
York, Vol.104 No. ST9, Proc. paper 14016, pp. l337
1353.
13. Wakabayashi, M. and Nonaka, T., 1965. On the Buck-
ling Strength of Angles in Transmission Towers, Bulletin
of the Disaster Prevention Research Institute, Kyoto Uni-
versity, Japan, Vol. 15, Part 2, No. 91, November, pp.
118.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 66
INTRODUCTION
WT sections are commonly used as chord members in lightly
and moderately loaded roof and floor trusses. In this applica-
tion, these members are subjected to combined axial and
flexural loads. The design of these sections for flexural loads
was not specifically addressed in the ASD Specification. Not
until the publication of the LRFD Specification was flexural
loading of these sections directly addressed. With the advent
of ultimate strength design methods included in the LRFD
Specification, it became obvious that these sections could
carry increased loads.
This paper will look at design capacity for these sections
and will report on laboratory experimentation supporting
these limits.
SECTION STRENGTH
A doubly symmetric, compact, braced wide flange section has
an allowable moment (M
n
) of M
p
in LRFD. The mean value
for the plastic shape factor (SF) for wide flange sections is
1.12. Considering a live to dead load ratio of 3/1 (effective
load factor (LF) of 1.5), the section utilizes:
M
n
/ LF(M
p
)
0.9(M
p
) / 1.5(M
p
) = 0.6
or 60 percent of the ultimate capacity of the section, where
M
p
= 1.12M
y
.
For weak axis bending of this same section, the design
moment is again M
p
. The plastic shape factor for a wide
flange section in weak axis bending is 1.50. Using the same
load ratio, the section utilizes:
0.9(M
p
) / 1.5(M
p
) = 0.6
or 60 percent of the ultimate capacity of the section, where
M
p
= 1.50M
y
.
The case for WT sections is a bit different. The design
moment for positive bending, where the stem is in tension, is
1.5M
y
.* The value of M
y
used here is the lesser value,
considering yielding in the stem, rather than the greater value
which considers yielding in the flange. The shape factor for
WT sections is a bit variable, but it can be seen from Fig. 1
that the mode (value occurring most frequently among all WT
sections) of 1.78 is a reasonably conservative assumed value.
Based on this value, M
p
= 1.78M
y
. Using the same load ratio,
the section utilizes only:
0.9(1.5M
y
) / 1.5(1.78M
y
) = 0.51
or 51 percent of the ultimate capacity of this section.
How much of the ultimate capacity of a WT would be
utilized if the limit for flexural strength were M
p
instead of
1.5M
y
? Assuming the same load ratios as before, the section
would utilize:
0.9(M
p
) / 1.5(M
p
) = 0.6
or 60 percent of the ultimate capacity of the section.
Strength is not the controlling factor. The key thing to
consider is serviceability under service load conditions. For
a wide flange section loaded in strong axis bending, where
Flexural Strength of WT Sections
DUANE S. ELLIFRITT, GREGORY WINE, THOMAS SPUTO, and SANTOSH SAMUEL
Duane S. Ellifritt is Crom Professor of Structural Design,
Department of Civil Engineering, University of Florida,
Gainesville, FL.
Gregory Wine is a major, U.S. Army Corps of Engineers.
Thomas Sputo is consulting structural engineer, Gainesville,
FL.
Santosh Samuel is programming engineer, WedgCor Metal
Building Systems, Denver, CO.
*Revision to specification, October 1990. Was formerly M
y
.
Fig. 1. Variation of shape factor for WT section.
SECOND QUARTER / 1992 67
M
p
= 1.12M
y
, the flexural stress in the section at service load
is:
(M
n
/ LF) / S
0.9(1.12M
y
) / 1.5S = 0.67F
y
For weak axis flexure of a wide flange, where M
p
=
1.50M
y
, the flexural stress in the section at service load is:
0.9(1.5M
y
) / 1.5S = 0.90F
y
Using 1.78 as the mean shape factor for WT sections and
letting M
p
= 1.78M
y
for the flexural limit where the stem is
in tension, would result in a flexural stress at service load of:
0.9(1.78M
y
) / 1.5S = 1.07F
y
This would mean that the section has begun to yield in the
stem at service load, a condition to be avoided for reasons of
deflection control.
If the limit is 1.5M
y
, the flexural stress at service load
would be:
0.9(1.5M
y
) / 1.5S = 0.90F
y
The flexural stress at service load is now less than the yield
stress, and the same as for a wide flange section in weak axis
bending.
LABORATORY TESTING
Laboratory testing was conducted to study the behavior of
WT sections in both positive (stem in tension) and negative
(stem in compression) flexure. The specimens were tested
over a 7-ft span and were loaded using a mechanically driven
universal testing machine, as shown in Fig. 2. Loads were
measured using a load cell and deflections were measured
using an LVDT.
Negative bending was induced by rotationally fixing the
ends of the span to create a fixed ended beam. Schematics of
the testing apparatus are shown in Fig. 3 for positive bending
and Fig. 4 for negative bending.
Tests 1 through 5 were performed for positive bending and
tests 6 through 8 had the ends fixed creating negative bending
at the supports. Table 1 lists the cross section measurements
and measured yield strengths for all eight specimens. The
listed section designations are assumed since they were not
initially known and cannot be conclusively determined from
the listed measurements. Table 2 lists the calculated cross
section properties for all eight sections.
Load versus deflection curves were developed from the
experimental measurements of Tests 1 through 5. As ex-
pected, the sections, on average, developed the calculated
Fig. 2. Test beam in loading fixture. Fig. 4. Negative bending test.
Fig. 3. Postitive bending test.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 68
plastic moment capacity, as shown in Table 3. Figure 5 shows
a typical failure, including the plastic hinge which was
formed. Figure 6 is the moment versus deflection diagram for
Test 4. The deflections follow the predicted elastic deflections
quite well until the initiation of yielding in the stem at M
y
,
then begin to gradually increase until the plastic capacity of
the section is reached. Based on these measured deflections,
it is reasonable to allow a service load of 0.90M
y
(0.90F
y
) for
serviceability reasons.
Load versus deflection curves were also developed for
Tests 6, 7, and 8. These sections failed in the region of
negative bending where the stem was in flexural compres-
sion. Figures 7 and 8 show a typical failure of the stem through
buckling. Figure 9 shows the moment versus deflection dia-
gram for Test 7. Again, the measured deflections generally
follow the predicted elastic deflections once the slippage of
the specimen in the supports is considered.
Table 4 compares the measured capacities versus calcu-
lated capacities. If the provisions of the LRFD specification
are followed directly, the stems of all three specimens are
slender elements and the capacity of the sections must be
reduced according to LRFD Appendix B. But the criteria for
tee stems was derived for stems in axial compression, not
stems in flexural compression and uses a very conservative
assumption for the length of the unstiffened element. It is
possible to derive a somewhat less conservative limit for
stems in flexural compression, using the same basic criteria,
which shows the test specimen stems not to be slender ele-
ments. This derivation is shown in Appendix B of this paper.
The collected test data for negative bending is rather slim
to base a specification provision on. It is possible, however,
to conservatively set initiation of stem yielding (M
y
) as an
upper limit for strength in negative bending. Further research
may reasonably allow a design moment greater than M
y
.
Table 1.
Section Measurements
Test No. bf tf d tw Fy
Measured
Nominal
Section
1
2
3
4
5
6
7
8
5.71
5.72
6.44
6.52
6.49
6.21
6.13
6.14
0.449
0.477
0.360
0.359
0.367
0.415
0.415
0.416
5.15
5.10
6.12
6.19
6.08
6.54
6.54
6.55
0.287
0.302
0.277
0.275
0.269
0.293
0.270
0.255
51.0
51.0
55.7
55.7
55.7
50.0
50.0
50.0
WT513
WT513
WT613
WT613
WT613
WT615
WT615
WT615
bf = Flange width, in.
tf = Flange thickness, in.
d = Total section depth, in.
tw = Stem thickness, in.
Fy = Yield stress, ksi
Table 2.
Cross-Section Properties
Test No. Ix Iy Zx Sxf Sxs
1
2
3
4
5
6
7
8
8.39
8.54
13.28
13.69
12.84
16.96
15.92
15.34
6.98
7.46
8.02
8.31
8.38
8.29
7.98
8.03
3.68
3.80
4.99
5.07
4.80
6.01
5.56
5.29
7.54
7.76
9.31
9.52
9.34
10.94
10.64
10.57
2.08
2.14
2.83
2.88
2.73
3.40
3.16
3.01
Ix = X axis moment of inertia, in.
4
Iy = Y axis moment of inertia, in.
4
Zx =
X axis plastic section modulus, in.
4
Sxf =
X axis section modulus to flange, in.
3
Sxs =
X axis section modulus to stem, in.
3
SECOND QUARTER / 1992 69
LRFD SPECIFICATION
1
LRFD equation F1-15 is the limiting lateral buckling equation
for WT strength in both positive and negative bending. This
equation is theoretically correct for elastic buckling of tee
shaped beams. In positive bending, it is impossible in practice
to develop this elastic strength before a plastic hinge is
formed. Note the calculated capacities using Eq. F1-15 in
Table 3 as compared to the plastic moment capacities. Also
note Fig. 10 which shows Eq. F1-15 plotted for a WT620.
Note that a WT620 will not experience lateral buckling with
the flange in compression until the unbraced length reaches
75 ft! It would probably be better just to note the capacity in
positive flexure to be 1.5M
y
and to eliminate the use of
Eq. F1-15 for positive bending.
It may be possible to exceed the elastic buckling strength
in negative bending in some rare cases, however. Table 5 lists
the elastic buckling stress computed from F1-15, using C
b
=
1.0, for all WT, ST, and MT sections listed in the manual
where the buckling stress at a length of 25 times the section
depth (25D) is 50 ksi or less. Note that this list excludes most
sections listed in the Manual of Steel Construction.
1,2
For any
case where the elastic buckling stress is greater than the yield
stress, Eq. F1-15 will not control. For cases where the elastic
buckling stress is less than the yield stress, lateral buckling
will govern for negative bending, and lesser of M
y
and Eq.
F1-15 should govern. Slender elements should be considered
as recommended in Appendix B of this paper. If slender
elements are present, the lesser value of the elastic lateral
buckling stress from Eq. F1-15 and Q
s
M
y
should govern.
ASD SPECIFICATION
2
Judging from the above, it is unnecessarily conservative to
limit the allowable bending stress in the stem for positive
bending to 0.66F
y
. A limit of 0.90F
y
would be more reasonable
and in keeping with the LRFD design criteria which allow a
service load of 0.90M
y
at a live/dead load ratio of 3/1. This
high allowable stress is not an isolated case in steel design
specifications. The specifications of the Steel Joist Institute
allow a bending stress of 0.90F
y
for solid round web members
in open web steel joists. Rounds have a plastic shape factor
of only 1.70 as opposed to an average of 1.78 for WTs.
Negative bending of WTs is not covered in the ASD
specification. This question was raised by Milek
6
in 1965. At
that time, it was recommended that the allowable bending
stress for negative bending be 0.60F
y
. In light of the results
shown in Table 5, both lateral buckling and strength should
be checked for sections and lengths listed in Table 5, for cases
where the elastic buckling stress is less than the yield stress.
It is probably reasonable to allow a compressive stress of
0.60F
y
on the stem, modified by the applicable slender ele-
Table 3.
Test Results for Positive Bending
Test No. Mn+ + Mys Mp Mtest Mp / Mtest
1
2
3
4
5
1,711
1,856
2,061
2,148
2,137
105.9
109.0
157.7
160.4
152.0
187.8
193.8
278.0
282.6
267.3
180.0
187.5
318.7
281.2
288.7
Avg.
0.958
0.967
1.146
0.995
1.080
1.029
Mn+ = Mn from LRFD Eq. F1-15 using B+, kip/in.
Mys = Yield moment for yielding of stem, kip/in.
Mp = Plastic moment capacity, kip/in.
Mtest = Measured test moment, kip/in.
Table 4.
Test Results for Negative Bending
Test No. Mn Mys Mp Mtest Mys / Mtest
6
7
8
322.5
302.5
295.2
169.9
157.8
150.5
300.3
278.0
264.4
168.0
187.5
168.0
Avg.
0.989
1.131
1.116
1.078
Mn = Mn from LRFD Eq. F1-15 using B, kip/in.
Mys = Yield moment for yielding of stem, kip/in.
Mp = Plastic moment capacity, kip/in.
Mtest = Measured test moment, kip/in.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 70
ment modification factors shown in Appendix B of this paper,
as a strength limit. One possible method of checking lateral
buckling strength would be to use LRFD Eq. F1-15, incorpo-
rating a factor of safety of 1.67. As modified, this equation
reads:
F
b
= (34,000C
b
I
y
J / L
b
S
x)
( 1 + B
2
B)
where:
B = (2.3d / L
b
) I
y
/ J
CONCLUSION
Laboratory testing has verified the strength limits for WT
sections in both positive and negative bending. Based on this
testing, the LRFD design requirements have been validated
and recommended modifications to the ASD specification
have been noted. Additionally, slender element criteria for tee
section stems in flexural compression have been developed
and shown in Appendix B of this paper.
ACKNOWLEDGMENTS
Testing was performed in the Structures and Materials Testing
Laboratory at the University of Florida. Test specimens were
donated by Whitley Steel, Baldwin, FL.
The conclusions and recommendations are those of the
authors and do not necessarily reflect the views of the Ameri-
can Institute of Steel Construction.
Fig. 5. Plastic hinge formed in positive bending.
Fig. 6. Moment vs. deflection for Test 4.
Fig. 7. Local buckling of stem in negative bending.
Fig. 8. Lateral displacement of stem in negative bending.
SECOND QUARTER / 1992 71
APPENDIX AREFERENCES
1. Load and Resistance Factor Design Manual of Steel Con-
struction, 1st ed., AISC, Chicago, 1986.
2. Allowable Stress Design Manual of Steel Construction, 9th
ed., AISC, Chicago, 1989.
3. Standard Specifications, Load Tables, and Weight Tables
for Steel Joists and Joist Girders, Steel Joist Institute,
Myrtle Beach, SC, 1990.
4. Salmon, Charles G., and John E. Johnson, Steel Structures,
Design and Behavior, 2nd ed., Harper and Row, New York,
1980., pp. 310314, 318319.
5. Galambos, Theodore V., ed., Guide to Stability Design
Criteria for Metal Structures, 4th ed., Wiley, New York,
1988, p. 103.
6. Milek, William A., One Engineers Opinion, Engineer-
ing Journal, Vol. 2, No. 3, pp. 103104.
APPENDIX BSLENDERNESS LIMITS FOR
STEMS OF TEES IN FLEXURAL COMPRESSION
DERIVATION
Both ASD and LRFD set the noncompact or
r
limit for tee
stems as:
d / t 127 / F
y
where:
d = section depth
t = stem thickness
This is based on the assumption of a uniformly compressed
plate where one unloaded edge is fixed and the other unloaded
edge is free. The limit is derived from classical plate buckling
theory where k = 1.227 for this case of loads and fixity. See
Ref. 4, pages 310314 for the full background of this derivation.
This limit is not correct for a case where the stem is in
flexural compression. Reference 5, page 103, gives a value of
k = 1.61 for a case where flexural compression exists. This
case assumes no compression at the fixed edge and full
compression at the free edge as is shown in Fig. 11.
Starting with the classical plate buckling equation of:
F
cr
= k
2
E / [12(1 M
2
)(b / t)
2
AISC provisions require that the critical buckling stress (F
cr
)
be no less than the yield stress, F
y
. Substituting in M = 0.3 for
steel and E = 29,000 ksi yields:
(b / t) 161 k / F
y
This value must be reduced to account for residual stress,
post-buckling effects, and imperfections (see Ref. 4). A re-
duction value of = 0.7 is used. Therefore:
(b / t) 161 k / F
y
or
(b / t) 113 k / F
y
Substituting in k = 1.277 produces the limit of 127 / F
y
for
uniform axial load.
Substituting in k = 1.61 produces a limit of 144 / F
y
for
flexural compression.
Next, it needs to be determined what is the correct value of
b to use. Using the full depth of the section is unnecessarily
conservative. Considering that the elastic neutral axis for
almost all WT sections is somewhere in the stem near the
Fig. 9. Moment vs. deflection for Test 7. Fig. 10. Flexural strength of WT620, F
y
= 50 ksi.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 72
flange-stem juncture, a more realistic and still slightly con-
servative choice would be:
b = d t
f
where:
t
f
= flange thickness
d = section depth
LRFD Eqs. A-B5-5 and A-B5-6 would need to be modified
for the new slenderness limit. They have been modified by
proportionally shifting the limits and providing the same
values of Q
s
at each end of the new range as was previously
provided for stems in axial compression. Reference 4, pages
318319 show this methodology to be in keeping with AISC
provisions.
Table 5.
Elastic Lateral-Torsional Buckling Stress
by LRFD F1-15 for various Unbraced Lengths.
Only Sections where F
y
< 50 ksi at L = 25D Listed.
Elastic Lateral Buckling Stress for Negative
Bending at Various Unbraced Lengths, ksi
Section L = 10D L = 15D L = 20D L = 25D
WT 18.00 85.00
WT 18.00 80.00
WT 18.00 75.00
WT 18.00 67.50
WT 16.50 70.50
WT 16.50 65.00
WT 16.50 59.00
WT 15.00 58.00
WT 15.00 54.00
WT 15.00 49.50
WT 13.50 47.00
WT 13.50 42.00
WT 12.00 34.00
WT 12.00 31.00
WT 12.00 27.50
WT 10.50 31.00
WT 10.50 28.50
WT 10.50 25.00
WT 10.50 22.00
WT 9.00 20.00
WT 9.00 17.50
WT 8.00 15.50
WT 8.00 13.00
WT 7.00 11.00
WT 6.00 9.50
WT 6.00 8.00
WT 6.00 7.00
WT 5.00 6.00
MT 7.00 9.00
MT 6.00 5.90
MT 5.00 4.50
MT 4.00 3.25
73.1
64.6
56.5
43.0
69.0
56.9
45.1
67.4
56.3
46.3
68.0
53.0
55.7
47.3
37.4
46.9
71.6
53.3
40.9
70.4
49.7
66.4
44.8
56.9
67.1
44.7
35.2
50.0
33.2
32.0
41.1
63.0
63.6
56.7
50.0
38.5
60.7
50.7
40.6
59.4
50.1
41.6
60.7
47.9
50.4
40.9
32.9
43.5
61.2
46.4
36.2
61.6
44.3
58.8
40.4
51.1
58.3
39.6
31.6
45.4
28.9
27.2
34.6
52.2
55.4
49.7
44.1
34.3
53.5
45.0
36.4
52.3
44.4
37.2
54.0
43.1
45.4
35.6
28.9
39.9
52.8
40.5
31.9
54.1
39.4
51.9
36.3
45.7
50.7
35.0
28.3
41.0
25.3
23.3
29.6
44.0
48.8
44.0
39.2
30.8
47.4
40.2
32.7
46.4
39.6
33.4
48.3
38.9
40.9
31.3
25.6
36.6
46.1
35.7
28.4
47.8
35.2
46.1
32.7
41.0
44.6
31.2
25.3
37.1
22.3
20.3
25.6
37.9
Fig. 11. Tee stem in flexural compression.
SECOND QUARTER / 1992 73
As modified they read:
For stems of tees in flexural compression:
When 144 / F
y
< b / t < 203 / F
y
Q
s
= 1.908 0.00715(b / t) F
y
When b / t 203 / F
y
Q
s
= 26,780 / [F
y
(b / t)
2
]
The values of Q
s
would be applied to the limiting moment,
M
y
, in the same method as for stems in axial compression.
EXAMPLE
Given:
d = 6.17 in.
t
f
= 0.440 in.
b
f
= 6.52 in.
t
w
= 0.260 in.
F
y
= 36 ksi
Required:
Calculate the slenderness limits for axial compression and for
flexural compression using the proposed method.
Solution:
Axial compression:
127 / F
y
= 21.17
d / t
w
= 23.73 therefore slender element
Q
s
= 1.908 0.00715(23.73)(6.0) = 0.891
Proposed flexural compression:
144 / F
y
= 24.00
(d t
f
) / t
w
= 22.04 therefore not a slender element
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 74
INTRODUCTION
Structural tension members are designed to resist yielding
of the gross section or rupture of the minimum net section,
taking into account the effects of stagger and shear lag. The
shear lag effect must be considered when all the compo-
nents of a tension member are not transmitting the load to
the connection. For short connections, an angle connected
by one leg may fail in a combination of tension perpendicu-
lar to and shear parallel to the loaded axis. This type of
failure has been termed block shear when investigated for
beam web connections.
1,2,3
Most of the international codes for steel design have not
considered this type of failure.
4
The current AISC ASD
5
and
LRFD
6
specifications do incorporate formulae, in their re-
spective commentaries, to calculate block shear failure ca-
pacities. The current ASD Specification is based on the work
of Birkemoe and Gilmor
1
and is given by
P = 0.3A
nv
F
u
+ 0.5A
nt
F
u
(1)
where F
u
is the ultimate strength, and A
nv
and A
nt
are the net
shear and tensile areas, respectively.
In 1985, Hardash and Bjorhovde,
7
reported on tests con-
ducted on gusset plates in tension and suggested a different
approach to calculate block shear strength. They recom-
mended that the yield strength on the gross section on one
plane be added to the fracture strength of the net section on
the perpendicular plane. The first edition of the LRFD Speci-
fication
6
uses this approach to calculate nominal block shear
strength. The two equations given are
P
n
= 0.6F
y
A
vg
+ F
u
A
nt
(2)
P
n
= 0.6F
u
A
ns
+ F
y
A
tg
(3)
where F
y
is the yield strength, A
vg
and A
tg
are the gross shear
and tension areas, respectively, and A
ns
and A
nt
are the net
shear and tension areas, respectively. As explained in the
original paper and in the commentary, the larger of Eqs. 2 or
3 is to be used as the nominal block shear strength. The LRFD
resistance factor to be used in conjunction with these
equations is given as 0.75.
The commentaries for ASD as well as LRFD indicate that
block shear failure is not limited to the coped web of a beam.
Both clearly illustrate other possibilities including gusset
plates and angles when used in tension and connected by only
one leg. Finite element studies
8, 9
have indicated that the state
of stress for block shear in such angles is significantly differ-
ent from that in the beam webs, the tests on which the current
code equations are based. These angles are investigated in the
present study.
Since the size of the outstanding leg appears to effect the
eccentricity of the loading, and since the block shear equa-
tions in the codes do not include this factor, it was decided to
make the outstanding leg one of the parameters to be studied
in the experimental program. Other factors of interest in-
cluded the presence of stagger when two gage lines on the
same leg are used. The code treatment for stagger in a block
shear path is not exactly defined, but several recent manuals
and textbooks
10,11,12
all agree that it seems reasonable to
incorporate the long-standing s
2
/ 4g increase to net tensile
width.
This paper reports on the results of full-scale testing of
double-row, staggered, and unstaggered bolted connections
of structural steel angles. The effect of the variation of several
parameters are presented. The current code provisions are
found to be less conservative for block shear failure than net
section tensile failure in angles and a revised treatment is
suggested.
EXPERIMENTAL PROGRAM
It was considered desirable to test specimens that could
actually be allowed in design. The availability of angle sizes
was the first constraint placed upon the selection of connec-
tions to be tested. Next, for varying size of the outstanding
leg, it was desired to maintain the same angle thickness, if
possible, to eliminate thickness as a parameter in the study.
Also, there was a requirement of having two gage lines on a
leg so that stagger could be studied. It was desired not to have
the bolts govern the strength of the connection. At the same
time, in order for the connections to be short so that block
shear was the governing failure mode, the number of bolts
was limited. Finally, testing of a pair of angles was warranted
to reduce any eccentricity on the 300 kip capacity testing
machine available for the study.
With all the above constraints to be considered, the basic
Howard I. Epstein is professor of civil engineering at the
University of Connecticut, Storrs, CT.
An Experimental Study of Block Shear
Failure of Angles in Tension
HOWARD I. EPSTEIN
SECOND QUARTER / 1992 75
connections to be tested were pairs of angles,
5
16
-in. thick,
connected by two rows of
3
4
-in. diameter bolts in two rows
on a 6-in. leg. Angles 66
5
16
were first selected for testing
various connection configurations by varying the number and
possible stagger of the bolts. To investigate the effect of the
outstanding leg, the same connections to the 6-in. leg were
then used for 64
5
16
and 63
1
16
angles.
The effect of staggering the bolts on the connected leg was
one of the parameters to be investigated. This requires con-
nections with two gage lines. For larger angles connected by
only one leg, two gage lines help to reduce the length of the
connection. This has the benefit of reducing the length of the
connection, but at the same time has the drawback of empha-
sizing the shear lag reduction in capacity. When two gage
lines are present, the fasteners are often staggered so that the
net area is not further reduced. Stagger does increase the
length of a connection, but it may be required for certain
geometries. For instance, when
3
4
-in. or larger diameter bolts
are used to connect a 5-in. angle leg, AISC minimum spacing
provisions mandate stagger when bolts are used on two gage
lines. To further investigate stagger, it was decided to also test
specimens having a 5-in. connected leg. To obtain some
consistency with the 6-in. angles,
5
16
-in. thick angles were
also chosen for the 5-in. angles. Therefore, various connec-
tions for 55
5
16
, 53
1
16
and 53
5
16
angles were tested.
The connections tested had three to eight bolts in two gage
lines, with and without stagger. The bolt configurations were
chosen to cover the transition from shorter connections, gov-
erned by block shear, to longer connections, governed by net
section failure. Since bolt shear was not desired,
3
4
-in. A490-
X bolts in standard holes were chosen (
7
8
-in. A325 bolts could
also have been used).
Connection geometries for the 6-in. connected leg were
chosen to have a minimum of four bolts, as fewer than four
bolts would usually lead to bolt capacities governing the
allowable load, and this was not desired. Three different
four-bolt connections for 6-in. angles are shown in Fig. 1. The
first (#1), where the included angle is obtuse at the ten-
sion/shear intersection in the block shear path, will be referred
to as having positive stagger. Next are shown examples of
negative stagger (#2), and a zero stagger (or unstaggered)
connection (#3). For all connections, the edge distance was
taken to be 1.5 in. and the pitch was the usual 3 in. for this
bolt size. Standard gages were used throughout. For a 5-in.
leg, these gages are g
1
= 2.0 and g
2
= 1.75 in. For a 6-in. leg,
these gages are 2.25 and 2.5 in., respectively.
There were three specimens, each consisting of a pair of
angles, tested for each connection. In all, 38 different connec-
tions were tested for a total of 114 tests. In order to eliminate
material variation for any particular connection, all were
fabricated from the same 40 ft length of angle. This limited
the length of each specimen (4.5 ft was chosen), but additional
tests on longer specimens produced consistent stress distribu-
tions and failures. All the specimens were fabricated by The
Berlin Steel Construction Company, Berlin, CT. Yield and
ultimate strengths were found from coupon tests conducted
by The New Haven Testing Laboratory, New Haven, CT.
All the connection geometries are listed in Table 1 along
with their yield and ultimate strengths. A summary of all
connection patterns is shown in Fig. 2. For reference, connec-
tions are specified by the number of bolts on the outer and
inner gage lines and by the sign of the stagger. For instance,
connections #1 to #3 are designated as 2/2,
+
2/2,
and 2/2,
0
respectively. Connections #4 to #6 are the five-bolt patterns
2/3,
3/2,
+
and 2/3,
0
respectively. Connections similar to #6
Fig. 1. Sign of stagger. Fig. 2. Connections tested.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 76
are often specified for an odd number of bolts. The thinking
behind this is that the net section, which resists the full load,
only has one hole deducted from the gross area. If all bolts
are assumed to be resisting an equal load, only a fraction of
the load (in this case 4/5) is taken by the cross section having
two holes deducted from the gross area. The lead, sometimes
called poisoned, bolt has traditionally been placed on the
inner gage line in order to minimize the loading eccentricity.
Completing the 66 angles tested are connections #7 and #8
which are unstaggered six- and eight-bolt patterns, respec-
tively. Since the test program was primarily designed to test
block shear, other six- and eight-bolt geometries and all
seven-bolt geometries were not investigated because their
failures should be predominantly net section. The only miss-
ing five bolt pattern (3/2
0
) was not investigated because it is
not typically fabricated.
These same eight connection geometries are repeated for
64
5
16
angles in connections #17 to #24. No other angles
having a 6-in. leg are available in a
5
16
-in. thickness. There-
fore, for this constant thickness, these 24 connections repre-
sent all the reasonable connection geometries. Thicker angles
(
3
8
-in., for instance) were not chosen for a number of reasons
including the diminished number of block shear failures and
the limitation of a 300 kip capacity testing machine.
Fortunately, the
5
16
-in. thick angles are also available in
three different 5-in. connected legs (53
1
2
and 53). Since
unstaggered patterns are not permissible, the only four and
five-bolt patterns tested were connections #25 to #28 for 55
angles. These four patterns are repeated for 53
1
2
angles in
connections #29 to #32 and for 53 angles in connections #33
to #36. In addition, two three-bolt patterns are possible (with-
out bolt shear governing) and were tested as connections #37
and #38. These two patterns are not usually fabricated, but
theoretically can be. Longer connections for the 5-in. angles
are possible, but the already completed 6-in. connections had
demonstrated the transition from block to net section failure.
TEST RESULTS
The last two columns of Table 1 show the average failure load
of the three specimens for each connection tested as well as
the type of failure. In general, the variation of the test loads
fell within a few percent of the average. The maximum and
minimum failure loads fell within 10 percent of the average
value for 34 of the 38 connections tested. The failures were
classified into five different types:
(A) block shear,
(B) predominantly block shear with some net section,
(C) predominantly net section with some block shear,
(D) net section, and
(E) bolt shear plus block shear.
Examples of different failure types are shown in Fig. 3a3e.
As expected, the shorter connections failed in true block
shear, while longer connections failed through the net section.
Other results concerning the failures are:
Failures for the shortest connections of equal leg angles
(all #1 and #25 specimens) were all classic block shear
failures.
As the length of the connection increased, failures gen-
erally went from types (A) to (B) to (C) to (D), as
described above.
For the same bolt pattern, as the length of the outstanding
leg decreased, failures increasingly became net section.
For instance, the three specimens (six angles in all)
comprising connection #4 produced predominantly
block shear failures. Block shear and net section failure
occurred equally for the six angles of connection #12.
Net section failure predominated in connection #20.
Failures for the longest connections of 66 angles (#8,
#16, and #24) were all through the net section.
Initial yielding was usually observed on the connected
leg near the bolt closest to the center of the specimen on
the outer gage line (as indicated in Fig. 1).
For the five-bolt, unstaggered connection geometry, all
the specimens (connections #6, #14, and #22) had the
lead bolt shear while the remaining four-hole pattern
failed in block shear (type E).
Two of the three eight-bolt specimens for connection #8
(4/4
0
) exceed the 300 kip capacity of the testing machine,
but there was significant yielding in evidence at that
load. Judging from the failures observed in other tests,
these specimens had almost reached their failure loads.
The time required to complete each test did not appear
to be a factor. One of the three specimens was tested to
failure in a few minutes, approximately the same time
required for coupon tests. There were no significant
differences obtained when these tests were compared to
the specimens which required longer to accomplish.
ALLOWABLE OR DESIGN LOADS
For bolted tension connections, ASD allowable capacities or
LRFD design strengths must consider several modes of fail-
ure. The tension member itself must be designed against
yielding of the gross area and rupture of the effective net area.
Where there is stagger, all possible failure paths must be
considered. All possible block shear paths must also be inves-
tigated. This includes paths that require bolts to fail in addi-
tion to the angle failing along a block shear path.
All connections tested used
3
4
-in. bolts in double shear.
Bearing areas and edge distances were such that they never
governed allowable or design loads. The connections were
considered to be bearing (as they most certainly were at
failure) and the threads were excluded from the shear planes.
The resulting X designation gave 35.3 kips allowable ASD
load per bolt (ASD/J3.2) and 51.7 kips LRFD design strength
per bold (LRFD/C-J3).
SECOND QUARTER / 1992 77
The allowable ASD load for rupture of the net section is
given by 0.5F
u
UA
n
(ASD/D1), and the LRFD design strength
is 50 percent greater than the ASD allowable (LRFD/D1).
Due to the spacing used, failure through one hole never
governed for any connection when compared to the two-hole
stagger path. The shear lag reduction coefficients U used in
these calculations were obtained from the current AISC codes
and not the 1 x / L contained in the original research.
13
U
was therefore set equal to 0.75 for all connections except
those with the 3/3
0
and 4/4
0
patterns for which U was 0.85.
The allowable ASD load for yielding of the gross cross-
section is given by 0.6F
y
A
g
, where A
g
is the gross area. The
LRFD design strength is 50 percent greater than this ASD
allowable. Neither yielding provision came close to govern-
ing the strength of any connection tested.
For each connection tested, the ASD allowable load P
A
and
the LRFD design load P
n
were calculated on the basis of the
actual yield and ultimate strengths given in Table 1. The ASD
and LRFD governing loads are presented in Table 2 along
with the code equation numbers which produce them. Most
Table 1.
Connections Tested
Connection
#
Angle Size
(in.)
Connection
Geometry
Yield
Strength
Fy
(ksi)
Ultimate
Strength
Fu
(ksi)
Average
Failure
Load
(kips)
Failure
Type
1
2
3
4
5
6
7
8
66
5
16
2/2
+
2/2
2/2
2/3
3/2
+
2/3
3/3
4/4
51.9
51.4
51.0
53.0
49.3
51.4
51.6
52.0
73.9
77.0
75.5
77.2
73.6
75.0
74.8
74.6
182.5
204.2
188.7
242.7
204.9
259.7
237.1
>297.7<
A
A-B
A-B
B
C
E
B-C
D
9
10
11
12
13
14
15
16
64
5
16
2/2
+
2/2
2/2
2/3
3/2
+
2/3
3/3
4/4
51.0
46.8
50.3
55.5
50.5
49.4
46.5
48.1
72.4
68.2
71.0
80.0
70.2
68.9
64.9
65.7
202.7
203.9
194.2
247.1
189.1
219.8
218.6
243.5
A
B
A
B-C
C
E
C
D
17
18
19
20
21
22
23
24
63.5
5
16
2/2
+
2/2
2/2
2/3
3/2
+
2/3
3/3
4/4
48.3
52.5
52.1
50.3
49.5
48.0
45.6
46.8
74.5
76.6
78.2
68.5
69.4
69.1
69.3
69.7
198.2
198.8
199.3
238.5
216.1
250.6
236.5
255.2
B
B
B
C
B
E
C-D
D
25
26
27
28
55
5
16
2/2
+
2/2
2/3
3/2
+
44.3
44.6
45.1
50.4
62.0
61.5
63.2
70.1
154.1
155.8
194.9
169.6
A
B
B
C
29
30
31
32
53.5
5
16
2/2
+
2/2
2/3
3/2
+
47.9
45.0
45.2
48.8
71.6
67.8
68.2
72.6
174.1
171.8
208.8
189.9
B
B
C
B
33
34
35
36
37
38
53
5
16
2/2
+
2/2
2/3
3/2
+
1/2
2/1
+
42.5
43.1
42.5
42.2
46.1
44.1
59.4
61.0
62.6
61.1
65.4
61.8
149.4
161.5
187.2
163.0
173.3
126.8
B
B
B
C
A
B
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 78
of the connections are governed by the block shear loads
calculated from Eqs. 1 through 3. Connections #6, #14, and
#22 were governed by the combination of lead bolt shearing
and block shear through the remaining bolt pattern (the type
E failure discussed previously). Some of the longer connec-
tions for the smaller angles were governed by net section
failure.
The ratios of the failure loads to allowable loads are also
shown in Table 2. The ratio of the failure load to the ASD
allowable load and LRFD unfactored nominal resistance are
given by R
A
and R
L
, respectively. The adequacies of these
ratios will be discussed in a subsequent section.
RESULTS
The 38 connections tested were chosen so that many of the
variables considered to be important to the block shear phe-
nomenon could be isolated. Since the material properties
varied from one connection to another, these factors were
eliminated by calculating code loads and all appropriate ratios
based on actual material strengths. The effect of several other
parameters are now examined.
The Outstanding LegTo demonstrate how the outstand-
ing leg influences the failure load, nondimensional average
failure loads are plotted versus the length of the outstanding
leg for constant connection geometries. The failure load is
nondimensionalized by dividing by F
u
A*, the product of the
ultimate strength and the gross area of the 66 or 55,
whichever is appropriate. The results are presented in Fig. 4.
Code equations predict that as the outstanding leg increases,
the failure load increases since the gross area increases.
Eventually, block shear will govern and the failure load will
then remain constant since the code equations do not contain
any outstanding leg effects.
In all, twelve different connection geometries were each
tested for three different outstanding legs. For instance, con-
nections #24 to #16 to #8 are plotted as the 6-in. 4/4
0
line in
Fig. 4. Ten of the twelve connection geometries actually show
a decrease in failure load as the outstanding leg increases.
Only two connections produced a monotonic increase (the
6-in. 4/4
0
and the 5-in. 2/3
patterns). The 4/4
0
connection
exhibits no block shear, and the increase shown in Fig. 4 is as
expected for net section failure. The 5-in. 2/3
patterns are the
longest 5-in. connections and failures and code predictions
are partially net section and block shear.
The decrease in failure load with increasing outstanding
leg size and, therefore, gross area, required further investiga-
tion. A significant clue in explaining this behavior was clearly
in evidence after observing all 114 failures. Almost every
failure was preceded by necking down and eventual failure
initiation at the points indicated in Fig. 1. Clearly, this indi-
Fig. 3. Examples of various failure types.
SECOND QUARTER / 1992 79
cated the presence of bending for this tension loading. In fact,
the eccentricity associated with the loading was shown to
account for the observed test behavior. Eccentricity turns out
to be the key to explaining the behavior shown in Fig. 4.
Adidam,
14,15
demonstrated this by analytically varying the
eccentricity. Chamarajanagar
16
obtained the same conclu-
sions using finite element studies.
StaggerConnection #3 has no stagger (2/2
0
). Connec-
tion #1 has positive stagger (2/2
+
). Both connections are
66
5
16
angles and have the same shear area. When the test
results are nondimensionalized for material properties, the
effect of stagger can be isolated. Code equations predict an
increase in loads, as the result of the addition of the s
2
/ 4g
factor to the width. There are two other sets of connections
which differ only in that one has zero and the other has
positive stagger. The ASD code predicted increase for these
Table 2.
Comparison of Test Loads to AISC Codes
Conn.
#
Average
Failure
Load
(kips)
ASD LRFD
PA
(kips)
Equation
No. RA
PN
(kips)
Equation
No. RL
1
2
3
4
5
6
7
8
182.5
204.2
188.7
242.7
204.9
259.7
237.1
>297.7<
105.7
131.7
102.6
141.1
125.9
137.2
131.5
160.9
J4-1,2
J4-1,2
J4-1,2
J4-1,2
J4-1,2
J4,3-2
J4-1,2
J4-1,2
1.727
1.550
1.839
1.720
1.627
1.893
1.803
1.850
157.9
191.9
157.3
208.5
183.7
209.3
202.5
247.4
C-J4-1
C-J4-2
C-J4-2
C-J4-2
C-J4-2
J3+CJ4
C-J4-2
C-J4-2
0.867
0.798
0.900
0.873
0.837
0.931
0.878
0.902
9
10
11
12
13
14
15
16
202.7
203.9
194.2
247.1
189.1
219.8
218.6
243.5
103.5
116.7
96.5
146.3
120.1
128.9
114.1
138.7
J4-1,2
J4-1,2
J4-1,2
J4-1,2
J4-1,2
J4,3-2
J4-1,2
D1
1.958
1.747
2.012
1.689
1.575
1.705
1.916
1.756
154.9
172.2
152.1
217.1
181.3
200.3
178.7
208.0
C-J4-1
C-J4-2
C-J4-2
C-J4-2
C-J4-2
J3+CJ4
C-J4-2
D1-2
0.981
0.888
0.958
0.854
0.782
0.823
0.917
0.878
17
18
19
20
21
22
23
24
198.2
198.8
199.3
238.5
216.1
250.6
236.5
255.2
106.5
131.1
106.3
125.2
118.7
129.2
121.8
137.6
J4-1,2
J4-1,2
J4-1,2
J4-1,2
J4-1,2
J4,3-2
J4-1,2
D1
1.861
1.516
1.875
1.905
1.821
1.940
1.942
1.855
154.1
193.3
161.7
191.6
178.5
198.0
183.7
206.4
C-J4-1
C-J4-2
C-J4-2
C-J4-1
C-J4-2
J3+CJ4
C-J4-2
D1-2
0.965
0.771
0.924
0.934
0.908
0.949
0.966
0.927
25
26
27
28
154.1
155.8
194.9
169.6
76.0
92.7
102.6
105.6
J4-1,2
J4-1,2
J4-1,2
J4-1,2
2.028
1.681
1.900
1.606
117.9
143.8
157.9
163.3
C-J4-2
C-J4-2
C-J4-2
C-J4-2
0.980
0.813
0.926
0.779
29
30
31
32
174.1
171.8
208.8
189.9
87.7
102.2
110.7
109.4
J4-1,2
J4-1,2
J4-1,2
J4-1,2
1.985
1.681
1.886
1.736
131.6
152.7
165.5
164.3
C-J4-2
C-J4-2
C-J4-2
C-J4-2
0.992
0.844
0.946
0.867
33
34
35
36
37
38
149.4
161.5
187.2
163.0
173.3
126.8
72.8
89.4
97.8
92.1
80.1
68.5
J4-1,2
D1
D1
J4-1,2
J4-1,2
J4-1,2
2.052
1.806
1.914
1.770
2.164
1.851
113.0
134.1
146.8
139.9
123.5
106.6
C-J4-2
D1-21
D1-2
C-J4-2
C-J4-2
C-J4-2
0.992
0.903
0.956
0.874
1.052
0.892
average = 1.820 average = 0.901
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 80
geometries is 5.2 percent (see Ref. 14 for the calculation
details). This compares with a test average of a 1.7 percent
increase. Table 3 shows this result.
Other connections which differ only in stagger are also
shown in Table 3. There are seven sets of connections that
only differ in having negative versus positive stagger. The
codes do not recognize any difference in the sign of the
stagger and, hence, predict the same failure load. The average
of all the tests showed an increase of 1.4 percent. There are
three sets of connections that only differ in having zero versus
negative stagger. The codes predict an increase of 4 percent
while the tests averaged a decrease of 2.4 percent.
In an analytical investigation, using finite elements,
Thacker and Epstein
17
demonstrated that the stagger should
probably have a sign associated with it. That is, positive
stagger, as defined by this study, should have an increase in
failure load, and negative stagger a decrease. These test
results are hardly conclusive, but do reinforce the analytical
work. The results presented here are for the ASD code treat-
ment. LRFD comparisons are more difficult due to the inclu-
sion of both F
y
and F
u
, and two spearate equations for block
shear. When attempted, however, LRFD comparisons show
results similar to those presented here for ASD.
Shear LengthTable 4 presents the comparisons for ASD
code and test results for those connections that only differ in
that parameter. In some cases, however, there was also a
change in the sign of the stagger (which makes no difference
in the code results). The results seem to indicate that, on the
average, the code is reasonably taking this parameter into
account. When the sign of the stagger is incorporated into the
code equations, the comparisons, on the average, are even
better.
A question which naturally arises is which connection
geometry to choose. For instance, if the load to be transmitted
requires four bolts, should the specified connection be a 2/2,
+
a 2/2,
or an unstaggered 2/2
0
connection, if that is appropri-
ate. There are opposing factors at work in making this deci-
sion. The first is the increase in block shear strength associ-
ated with an increase in shear length. The second is the
decrease probably associated with negative stagger.
The test results indicate that the increase in shear length,
associated with the negative stagger patterns, more than off-
sets the decrease due to the stagger. Therefore, if block shear
is the mode of failure and stagger is either desirable or
required, the negative stagger pattern should be specified.
However, when the connections become long enough so that
net section is the failure mode, the positive stagger pattern
should probably be specified.
ADEQUACY OF THE AISC CODES
FOR BLOCK SHEAR
For ASD, the assumed factor of safety in connection designs
is 2.0. As seen in Table 2, the tests averaged nine percent less
than their desired strength. For LRFD, the nominal code
capacity should equal the failure loads of tests. On this basis,
the tests averaged 9.9 percent less than their desired strength.
It also takes into account the scatter of the test data by finding
the coefficient of variation of the test resistance.
Analysis of the data from the 38 connections tested on the
basis of a statistical approach is inappropriate for this study.
If the tests were only for block shear, this would make sense.
However, the tests spanned the range from true block shear
failure through net section failures. Therefore, while on the
surface the average results indicate that the codes reasonably
predict failure loads, a delineation from block shear to net
section failure must be accomplished.
When the results are grouped, consistent trends appear. For
instance, the ratios R
A
or R
L
are seen to increase, on the
average, as connections become longer. For the same length
of connections, these ratios also increase as the outstanding
Fig. 4. Effect of the outstanding leg.
SECOND QUARTER / 1992 81
legs become shorter. Putting this another way, the ratios are
closer to their desired values the more that net section is the
mode of failure and for true block shear failures, the equations
are not as conservative.
There are many ways of representing the results to demon-
strate the observed trends. The parameter that best represents
the transition from block shear to net section failures is the
same used in the study of the shear lag effects,
13
1 x / L. As
the connection length increases, this coefficient increases and
approaches one for long connections (net section). Also, as
the outstanding leg decreases, the centroidal distance x de-
creases and the coefficient again increases and approaches
one.
Figure 5 plots the ratio R
A
and R
L
as functions of 1 x / L.
The 38 data points for each represent the ratios given in Table
2 and the corresponding 1 x / L calculated from the centroi-
dal distance and the length of each connection.
14, 15
The trends
in the data become evident when a regression analysis is
accomplished. Least square straight line fits of the data are
shown in the figure. It appears that if connections were
considered that only exhibited block shear failure, the code
equations would be significantly deficient.
NEEDED AISC CODE MODIFICATIONS
There are many factors that point to the modifications needed
in the present code equations. First of all, it was demonstrated
that eccentricity is present in these connections and accounts
for the trends observed. Then, it was seen that the code
treatment for the shear contribution to the block shear equa-
tions is adequate. If these conclusions are accurate, the impli-
cation is that the tension contribution is not being adequately
addressed. When one considers that shear lag (eccentricity)
for net section tension failure incorporates a reduction coef-
ficient, it then appears obvious that this coefficient is required
for block shear as well.
Figure 6 shows the results for R
A
and R
L
when the code U
is incorporated into the AISC code equations as follows:
ASD (J4-1,2):
P = 0.3A
nv
F
u
+ 0.5UA
nt
(4)
LRFD, the larger of (C-J4-1):
P
n
= 0.75(0.6F
y
A
vg
+ F
u
UA
nt
) (5)
or (C-J4-1):
P
n
= 0.75(0.6F
u
A
ns
+ F
y
UA
tg
) (6)
The average value of R
A
, when U is included as in Eq. 4, is
now 2.038. Not only that, but the results of the regression
analysis on these new values of R
A
, as shown in Fig. 6,
Table 3.
Stagger Effects
Table 4.
Shear Length Effects
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 82
produce a conservative line with little slope. Similar behavior
is obtained for the LRFD ratio R
L
for which the average value
of R
L
is now 1.008 when the U factor is included, as in Eqs.
5 and 6. The regression analysis for the new values of R
L
, as
shown in Fig. 6, also appears appropriate. Both lines are in
excellent agreement with their ideal values. It is therefore
strongly recommended that Eqs. 4 through 6 be used for block
shear.
CONCLUSIONS
This study was conducted to see if the block shear failure of
angles in tension is substantially different from that of beam
web-to-column connections. The results of this study have
demonstrated this as well as showed some shortcomings in
the AISC code equations that were based on the beam web
studies. The effect of several of the parameters in the connec-
tion geometry was investigated. The eccentricity inherent in
the loading of these angles was shown to be a significant
factor in their failure. Eccentricity accounted for the role that
the length of the unconnected, outstanding leg played in the
failures.
The primary conclusion of this study is the need for modi-
fications in the AISC code treatment of block shear. The
proposed inclusion of the shear lag reduction coefficient U
for the tension area appears to produce appropriate results.
The extension to structural shapes other than angles, struc-
tural tees, for instance, is a subject that will require further
investigation. However, based on the inherent bending asso-
ciated with any tension member having U < 1, it seems
reasonable that the proposed code treatment should be appro-
priate and conservative for other shapes as well.
ACKNOWLEDGMENTS
This study was made possible by grants from the American
Institute of Steel Construction, The National Science Foun-
dation, and the University of Connecticut Research Founda-
tion. Special thanks are due to the Berlin Steel Construction
Company, Berlin, CT, for donating the test specimens. David
Ricker, of Berlin Steel, generously gave his time and effort to
this project.
Three Connecticutt firms, The New Haven Testing Com-
pany (New Haven), Raymond Engineering (Middletown),
and George Torello, Jr., Consulting Engineers (Old Lyme), all
donated to this project. Their contributions are gratefully
acknowledged. Naren Adidam, a very gifted graduate student
who contributed immensely to this project, tragically died in
an automobile accident near the conclusion of this study. This
work is dedicated to his memory.
REFERENCES
1. Birkemoe, P. C., and M. I. Gilmor, Behavior of Bearing
Critical Double-Angle Beam Connections, AISC Engi-
neering Journal, Vol. 15, 4th Quarter, 1978, pp. 109115.
2. Yura, J. A., P. C. Birkemoe, and J. R. Ricles, BeamWeb
Shear Connections: An Experimental Study, ASCE
Journal of the Structural Division, Vol 108, No. ST2, Feb.
1982, pp. 311325.
3. Ricles, J. R., and J. A. Yura, Strength of Double-Row
Bolted Web Connections, ASCE Journal of Structural
Engineering, Vol. 109, No. ST1, Jan. 1983, pp. 126142.
4. Madugula, M. K. S., and S. Mohan, Angles in Eccentric
Tension, ASCE Journal of Structural Engineering, Vol.
114, No. ST10, Nov. 1988, pp. 23872396.
Fig. 5. R versus 1 x / L.
Fig. 6. R versus 1 x / L with the proposed
code modification included.
SECOND QUARTER / 1992 83
5. American Institute of Steel Construction, Manual of Steel
Construction, Allowable Stress Design, 9th ed., Chicago:
AISC, 1989.
6. American Institute of Steel Construction, Manual of Steel
Construction, Load and Resistance Factor Design, 1st
ed., Chicago: AISC, 1986.
7. Hardash, S., and R. Bjorhovde, New Design Criteria for
Gusset Plates in Tension, AISC Engineering Journal,
Vol. 22, 2nd Quarter, 1985, pp. 7794.
8. Thacker, B. H., An Analytical Investigation of Block
Shear Failure in Structural Tension Members, M.S. The-
sis, University of Connecticut, 1987.
9. Gulia, F. S., Analysis of the Effects of Stagger in Struc-
tural Tension Members, M.S. Thesis, University of Con-
necticut, 1988.
10. Munse, W. H., and W. H. Chesson, Jr., Riveted and
Bolted Joints: Net Section Design, ASCE Journal of the
Structural Division, Vol. 89, No. ST1, Feb. 1963, pp.
107126.
11. Yura, J. A., Elements for Teaching Load and Resistance
Factor Design, American Institute of Steel Construction,
1988.
12. Smith, J. C., Structural Steel Design, New York: John
Wiley & Sons, 1988.
13. McCormac, J. C., Structural Steel Design: LRFD Method,
New York: Harper & Row, 1989.
14. Adidam, N. S., Analysisof Block Shear Experiments for
Structural Steel Angles in Tension, M.S. Thesis, Univer-
sity of Connecticut, 1990.
15. Epstein, H. I., and N. S. Adidam, The Effect of Eccentric
Tension on the Block Shear Failure of Angles, Advances
in Structural Testing, Analysis and Design, ICSTAD Pro-
ceedings, Bangalore, India, 1990, Vol. II, pp. 758763.
16. Chamarajanagar, R., Finite Element Studies for the Cor-
relation of Stresses and Failures of Block Shear Tests,
M.S. Thesis, University of Connecticut, 1990.
17. Epstein, H. I., and B. H. Thacker, The Effect of Bolt
Stagger for Block Shear Tension Failures in Angles,
Computers and Structures, Vol. 39, No. 5, pp. 571576.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 84
Engineering
J ournal
AMERICAN INSTITUTE OF STEEL CONSTRUCTION, INC.
Page 85: W. M. Kim Roddis
Distortion-Induced Cracking During Transit
Page 92: J effrey A. Packer, J . E. (Ted) Henderson,
and J aap Wardenier
Load and Resistance Factor Design of Welded Box
Section Trusses
Page 102: Farhang Aslani and Subhash C. Goel
Analytical Criteria for Stitch Strength of Built-up
Compression Member
Page 111: Pierre Dumonteil
Simple Equations for Effective Length Factors
Page 116: Anthony C. Webster and Rimas Vaicaitis
Application of Tuned Mass Dampers To Control
Vibrations of Composite Floor Systems
3rd Quarter 1992/ Volume 29, No. 3
1. INTRODUCTION
During the last twenty years, there has been a growing
awareness of distortion-induced cracking in bridges. Compa-
rable interest in this behavior has not been generated within
the building community. Distortion-induced fatigue cracking
is indeed a more common problem in bridges, arising from
cyclic distortions not only during handling and shipping but
also during service. Bridge service conditions are much more
likely to induce cyclic distortions than building service con-
ditions. However, handling and shipping conditions are simi-
lar for both building and bridge components. It would there-
fore be beneficial if the topic of distortion-induced cyclic
stress as a possible cause of fatigue cracking during shipment
were more widely understood in the steel industry. This paper
reviews the characteristics of distortion-induced cracking as
seen in bridges, presents a detailed example of cracking in
building trusses due to cyclic distortions during transit, sum-
marizes the conditions that lead to this type of cracking during
shipment, discusses the effect of cracking on structural per-
formance, and provides recommendations for prevention of
this type of damage.
2. DISTORTION-INDUCED CRACKING
Different kinds of steel structures and steel details are suscep-
tible to cracking from different causes. There are two major
classes of bridge and building fatigue damage
1
:
1. load-induced (also known as primary stress induced),
and
2. distortion-induced (also known as secondary stress
induced).
The cyclic stresses driving load-induced fatigue are due to
the primary load bearing behavior of the structure under
variable loads such as traffic for bridges and cranes for
buildings. Stress-induced fatigue is the type of cracking be-
havior of which structural engineers are usually most aware.
Bridge and building design specifications
2, 3, 4
address load-
induced fatigue by classifying detail types according to ex-
pected cracking behavior. These classifications are used to
specify appropriate design provisions intended to prevent
fatigue crack failures. Distortion induced fatigue is driven by
relatively small out-of-plane displacements caused by the
mutual presence of an abrupt change in stiffness and a peri-
odic force opposing it.
5
This type of cracking is most preva-
lent if, in addition to the required conditions of a discontinuity
in stiffness subjected to a periodic distortion, there is also a
weld toe located in the high cyclic stress region.
1
Current
design code provisions only peripherally address distortion-
induced cracking. The current AASHTO design specifica-
tions, for example, indirectly address distortion-induced
cracking by requiring a rigid attachment of connection plates
to both top and bottom flanges.
To understand distortion-induced cracking, it is useful to
determine what conditions commonly lead to this type of
cracking and then look at some specific examples. A survey
6,7
of 142 bridges that had developed cracking gathered informa-
tion on 149 instances of primary cracking causes (several sites
developed more than one type of cracking in different struc-
tural details). These 149 cases can be grouped into 28 catego-
ries of cracking.
1
These categories can be organized into a
hierarchical classification of the most prevalent causes of
cracking in steel bridges.
8
Figure 1 shows such a classification
of the primary causes for cracking in steel bridges, with the
most commonly occurring items listed first. It is interesting
to note that low toughness material was not observed to be a
primary cause of cracking in this survey, showing that speci-
fying higher toughness will not avoid cracking problems in
many cases. The most frequent type of cracking is that caused
by secondary and/or distortion-induced stress. Figure 2 shows
W. M. Kim Roddis is assistant professor, Department of Civil
Engineering, University of Kansas, Lawrence, KS.
Distortion-Induced Cracking During Transit
W. M. KIM RODDIS
Fig. 1. Classification of primary causes for cracking in
steel bridges.
THIRD QUARTER / 1992 85
a more detailed breakdown of this major category of cracking,
listing subcategories based on the kind of detail in which
cracking occurs. The subclass of out-of-plane distortion in a
small gap, usually a segment of a girder web, is the largest
group. The local gap geometry creates an abrupt stiffness
change. The effects of cyclic distortions are concentrated in
this gap, leading to distortion-induced cracking. These web-
gap cracks are most frequently due to distortions experienced
in-service but may also be caused by handling and shipping.
2.1. Web-Gap Cracking During Service
In-service web-gap cracking is illustrated in Figure 3.
1
The
floor-beam to girder connection detail shown in Fig. 3 is
susceptible to distortion-induced cracking at the small web
gap at the top of the floor beam connection plate. As the floor
beam carries traffic loads, the end of the beam rotates, forcing
the deflection of the girder web out of its normal longitudinal
plane. There is a small (
3
4
-in. to 1 in.) gap between the top of
the floor beam connection plate and the top girder flange.
This web gap causes an abrupt change in stiffness, concen-
trating the rotation-induced distortion within a short length of
the girder web. Forcing the distortion to take place in such a
small space introduces high stress ranges in the gap. Repeated
pumping of this short gap leads to longitudinal cracking of
the web at the weld at the top of the connection plate and at
the weld connecting the top flange to the web. This type of
web-gap cracking at floor beam or floor beam truss connec-
tion plates is so prevalent that a survey in one state revealed
cracks in half of the bridges with this detail.
6
Diaphragm and
cross-beam connections are frequently the sites of similar
web-gaps, but have less severe imposed rotations that the
floor beam case illustrated. This kind of web-gap detail
usually occurs where the top flange is in tension and arises
for the ironic reason that the connection plates were not
welded to the flange to eliminate an initiation site for load-in-
duced fatigue of the tension flange.
9
To preclude distortion-
induced cracking, the connection plate must be either rigidly
attached to the flange as required in the AASHTO provisions,
or the gap length must be significantly increased. Increasing
the gap length does not always solve the problem of distor-
tion-induced cracking. The increased flexibility may lead to
increased deformations in the web gap and, consequently, the
same stress levels. In-service web-gap cracking has been
observed in all of the following types of details:
1. floor beam connection plates in both the positive and
negative moment regions,
2. diaphragm connection plates in both the positive and
negative moment regions,
3. tied-arch floor beams in the web gap at the tie girder
connection, and
4. horizontal connection plates or gussets at points of lat-
eral bracing vibration as well as at gaps between stiffen-
ers and gussets.
2.2. Web-Gap Cracking During Shipping and Handling
Web-gap cracking happens not only under in-service condi-
tions but also during handling and shipping. Web-gap crack-
ing during transit is illustrated in Fig. 4.
1
The conditions
present (a stiffness discontinuity, a periodic displacement,
and a weld toe) are conducive to distortion-induced cracking.
An abrupt change in stiffness occurs at the short web gap
between the inside face of the flange and the beginning of the
stiffeners. Such a gap may also occur between the inside face
of the flange and the beginning of a connection plate. The
periodic force operating within the gap is caused by the cyclic
Fig. 2. Classification of secondary/distortion-induced
stress cracking in steel bridges. Fig. 3. Web-gap cracking during service.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 86
distortion as the girder sways during shipment. The bottom
of the girder is supported on the truck or rail car bed. The
upper part of the girder displaces relative to the bottom of the
girder due to the rocking motion of transit. These sway
displacements can introduce large cyclic bending stresses in
web-gap, leading to fatigue cracking in the web. The cracks
typically begin at a weld and are oriented longitudinally on
the girder, parallel to the primary axial stresses produced by
in-service major-axis bending of the girder. This orientation
mitigates the effect of the cracking and eases the repairs
required to ensure satisfactory service behavior. Web-gap
cracking has also been observed in the fabricating shop as the
girders were handled and turned. Cracking in the fabrication
shop also occurred in a large stiffened web plate where
web-gaps existed at the intersection of vertical and transverse
stiffeners that were not connected to each other.
3. CASE STUDY: DISTORTION-INDUCED
CRACKING IN BUILDING TRUSSES
DURING TRANSIT
Since handling and shipping practices are similar for bridge
and building steel, it is not surprising that distortion-induced
cracking also occurs in building components when conducive
conditions are present. Distortion-induced cracking during
transit is most frequently a problem for plate girders, however
it may also occur in trusses, especially where thin gussets and
heavy connection angles are used. This case study presents a
detailed example of cracking in building trusses due to cyclic
distortions during transit.
3.1. Description of Cracking
Roof trusses for an industrial plant consisted of 45 ft parallel
chord trusses, 7.5 ft deep as shown in Fig. 5. The chords were
structural tees. The vertical and diagonal web members were
double angles. The trusses were fabricated as typical shop
welded trusses, with members fillet-welded to gusset plates.
The connections between the trusses and building columns
were field bolted. The clip angles for these connections were
shop welded to the gusset plates.
Cracks were first observed in the end gusset plates by
ironworkers when unloading and sorting trusses at the erec-
tion site during the winter. An initial investigation was made
at that time and concluded that the cracks were fatigue cracks
caused by vibration of the cantilevered ends of the trusses
during truck delivery to the site. The trusses were shipped by
truck from the fabrication plant to the construction site for an
over-the-road distance of approximately 800 miles. The
trusses were shipped in a horizontal position as shown in
Fig. 6. Trusses were stacked six high, with a weight limit of
40,000 pounds per truck. The trusses were secured with
chains at both ends and at two or three panel points between.
The trusses were not originally blocked at the ends but rather
were shipped with the ends cantilevered from blocking at the
support points, one panel point in from each end. In response
to the observed cracks, changes were made to maintain mini-
mum steel temperature during welding and to limit the vibra-
tion amplitude of the truss ends during shipping by adding
end blocking as shown in Fig. 6. These changes reduced, but
did not eliminate, the development of cracks. Even after the
blocking changes, the top of the stacked trusses experienced
Fig. 4. Web-gap cracking during shipping.
Fig. 5. Roof truss elevation and details.
Detail A: Crack locations at upper chord end gusset.
Detail B: Crack locations at bottom chord end gusset.
THIRD QUARTER / 1992 87
noticeable sway and the ends of the trusses vibrated vertically
to a noticeable degree during shipping.
Cracks in the end of gusset plates again were detected
visually by ironworkers while bolting end connections of
trusses to columns. A visual inspection of the erected trusses
identified approximately 170 trusses with cracking. Magnetic
particle testing confirmed cracking in the metal for approxi-
mately 140 of these trusses. The total number of trusses on
the job was approximately 4,000. All cracks were found at the
ends of the trusses. No cracks were found at interior panel
points. Crack lengths varied between
1
4
-in. and 4 in. and were
typically about one inch long. Some cracks appeared on both
sides of the stem or plate, while other cracks appeared on only
one side. Crack locations may be categorized as follows:
1. Stem of tee top or bottom chord at base of rolled radius,
running parallel to radius, see Fig. 5, Detail A.
2. Stem of tee top or bottom chord at edge of fillet weld at
top of clip angle, running along weld at angle toe, see
Fig. 5, Detail A.
3. Top and bottom end gusset plate at edge of fillet weld
heel and toe of diagonal angles, see Fig. 5, Detail A.
Due to the persistence and extent of the cracking problem,
a detailed investigation was undertaken. The objective of this
investigation was to determine the probable cause of crack-
ing. The scope of the investigation consisted of:
1. Fractographic examination of crack surfaces.
2. Fatigue analysis.
3. Probable crack cause determination.
4. Evaluation of appropriateness of repair procedures.
The following sections discuss each of these topics and also
presents material properties determined during the initial
investigation.
3.2. Material Properties
Tests were conducted to establish the mechanical, chemical,
and fracture properties of the steel used in the roof trusses. A
standard reduced section tension test gave results of 75 ksi
tensile strength, 53 ksi yield stress, and 27 percent elongation.
To determine the effect of welds on these values, a reduced
section tension specimen with welded bars attached gave
results of 80 ksi tensile strength, 57 ksi yield stress, and 18
percent elongation. Chemical analysis showed a composition
of C-0.07, Mn-0.47, Si-0.2, P-0.026, S-0.025, Ni-0.05, Cr-
0.03, Mo-0.01, C
b
< 0.05. This chemistry meets the require-
ments for A36 steel. Notch toughness tests were performed
using half-size Charpy Vee Notch (CVN) specimens tested at
40F with the following results:
Test #1 half-size CVN with weld 36 ft-lb
Test #1 half-size CVN without weld 18 ft-lb
Test #2 half-size CVN with weld 95 ft-lb
Test #2 half-size CVN without weld 113 ft-lb.
Notice the wide spread in results, especially for the specimens
without welds. Such wide variability is indeed observable in
normally specified plate steels.
11
3.3. Fractographic Examination of the Crack Surfaces
Pieces from two cracked trusses were used to prepare crack
surfaces for fractographic examination. The crack surfaces
were visually examined and photographically documented,
then examined using a Scanning Electron Microscope (SEM).
SEM examination of all cracks matched the characteristics of
known fatigue surfaces. Cracks were examined from all three
types identified in Section 3.1 and shown in Fig. 5, Detail A.
Figure 7 is a photograph of a crack surface located in the base
metal of the stem of tee top chord, running along the fillet
Fig. 6. Schematic of truss shipping arrangement. Fig. 7. Fracture surface.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 88
weld at top of clip angle, as noted in Fig. 5, Detail A. This
photograph shows the pattern typically observed where the
cracks apparently initiated as edge cracks on both faces of the
plate and grew to the center, meeting to create through cracks
for a portion of their length.
3.4. Fatigue Analysis
3.4.1. Postulated Fatigue Mechanism
To understand the cracking behavior in these trusses, it is
necessary to propose a mechanism for fatigue that agrees with
the fractographic evidence and then verify by the application
of fracture mechanics that known conditions would be rea-
sonably expected to produce the observed cracks. The fatigue
mechanism postulated is displacement-induced cyclic stress
during shipment. The trusses were shipped by truck in a
horizontal position stacked six trusses high as shown in Fig. 6.
The top of the stacked trusses swayed and the ends of the
trusses vibrated to an extent easily observable by the eye
during shipping. Distortion-induced stress would have oc-
curred during transit due to differential rotation across small
gaps. The magnitude of the stress range for a particular gap
would have been dependant on the amount of rotation occur-
ring across that gap. Gaps and associated rotations are illus-
trated for all three cracking types identified in Section 3.1 and
shown in Fig. 5, Detail A. The size of the gaps for Section
A-A and B-B is approximately 1.5 in. The gap in Section C-C
is much larger, measuring about one foot. Section A-A
marked on Fig. 5, Detail A is drawn in Fig. 8. This section
shows how a cyclic vibration at the end of the clip angle leads
to a stress range in the gap in the stem of the tee chord between
the rolled radius and the fillet at the top of the clip angle. The
stress range for the gusset plate at the gap between the toe of
the diagonal and the toe of the clip angle on the Section B-B
shown in Fig. 5, Detail A may be addressed in a similar way.
Section C-C shown in Fig. 5, Detail A, experiences rotation
due to the sway of the stacked trusses as shown in Fig. 6.
3.4.2. Estimate of Stress Range and Number of Cycles
To perform a fatigue analysis, information is needed about the
magnitude of the stresses and the number of stress cycles
during shipment. Since shipment was complete, this data was
not directly available. Reasonable estimates were computed
as follows. The stress range for full stress reversals, as seen
in this case, is equal to twice the maximum stress. The
vibration amplitude is equal to twice the amount of the
displacement to one side. The vibration amplitudes needed to
produce the maximum possible stress ranges of twice the
yield stress were calculated to be:
d = displacement at end of clip angle (Fig. 8) 0.4 in.
s = sway at top of stacked trusses (Fig. 6) 4.5 in.
Therefore, it is reasonable to assume that the stress ranges
experienced at the observed locations could have been as high
as twice the yield stress.
The number of stress cycles may be bracketed by upper and
lower limits as follows. The natural frequency of the clip
angle extension (Fig. 8) was observed to be about eight cycles
per second. At a speed of 50 miles per hour, this gives 567
cycles per mile which compares reasonably to known ship-
ping cycles of 500 cycles per miles for rail.
1
For a shipping
distance of 800 miles, this results in 450,000 cycles or ap-
proximately half a million cycles as a reasonable upper
bound. The sway frequency of the stacked trusses may be
roughly guessed at less than one cycle per second. The lower
bound may be set at a order of magnitude less than the upper,
or approximately 45,000 cycles.
3.4.3. Crack Growth by Fatigue
Using the principles of fracture mechanics, a fatigue analysis
was performed to determine what stress ranges would be
required to produce the observed cracking for the high and
low estimates of stress cycles during shipping. The crack
configurations analyzed were one and two sided edge cracks
in a finite width plate subject to in-plane bending.
10
Normal
initial flaw sizes of 0.005 in. for rolled sections
12
and 0.03 in.
for fillet welds
1
were assumed for analysis. The initiation
stage thus was assumed not to contribute to the fatigue life.
The entire fatigue life was modeled by the propagation stage.
An appropriate computer program was used to model the
cracks.
8
Results of this analysis are summarized below.
Stress range (ksi) required to propagate crack through plate
for high estimate of 450,000 stress cycles:
one-sided crack two-sided crack
Stem of WT at rolled
radius 28 25
Stem of WT at weld 18 12
Gusset plate at weld 18 13
Fig. 8. Deformation in stem of tee, Section A-A from
Fig. 5 Detail A.
THIRD QUARTER / 1992 89
Stress range (ksi) required to propagate crack through plate
for low estimate of 45,000 stress cycles:
one-sided crack two-sided crack
Stem of WT at rolled
radius 58 54
Stem of WT at weld 38 26
Gusset plate at weld 38 28
These stress ranges correspond to vibration amplitudes of
0.04 in. (12 ksi) to 0.2 in. (58 ksi) at the end of the clip angle
and 0.5 in. (12 ksi) to 2.5 in. (58 ksi) for sway at top of stacked
trusses. These figures are well within expected deflection
ranges for trusses shipped in this manner.
3.4.4. Fracture Toughness
The fractographic examination showed crack growth by fa-
tigue with no indication of fast fracture. The fatigue analysis
results had a maximum stress intensity factor, K, of 20.7
ksi in. The material test results showed a minimum CVN of
18 ft-lb at 40F. Using the two-stage CVN-K
Id
-K
Ic
correla-
tion
13
on the minimum CVN value gives a fracture toughness
of 51 ksi in. for a dynamic strain rate (
.
10
1
sec
1
) at a
temperature of 40F and a fracture toughness of 51 ksi in.
for an intermediate strain rate (
.
10
3
sec
1
) at a tempera-
ture of 62F. This is in agreement with the observed behavior
of crack growth only by fatigue for winter truck shipment.
3.5. Probable Cause and Sequence of Crack Growth
The probable cause of cracking was therefore concluded to
be displacement-induced cyclic stress during shipment. The
observed crack locations were in thin plates subject to cyclic
bending where short gaps would be expected to result in a
geometric amplification of the cyclic stress leading to crack-
ing. The cracks initiated on one or both faces of the plates,
most frequently at the toe of fillet welds but sometimes at a
rolled radius. The cracks grew by fatigue through the thick-
ness of the plates. Vibration amplitudes of 0.04 in. to 0.2 in.
at the end of the clip angle and 0.5 in. to 2.5 in. for sway at
the top of stacked trusses are sufficient to produce the ob-
served cracking over the given shipment distance. The vibra-
tion amplitudes and number of loading cycles required were
in agreement with expected ranges for trusses shipped in this
manner. For this case, blocking of the clip angle (Fig. 5, Detail
A) would be recommended for proper shipping.
3.6. Evaluation of Appropriateness of Repair Procedures
The cracks in the roof trusses were repaired by gouging and
rewelding. Although this was an appropriate repair technique
for building trusses subject to static loads, gouging and re-
welding is not an appropriate repair for bridge members. An
alternate suggested repair of drilling holes approximately
1
2
-in. in diameter at the ends of the cracks was not used. Either
of these repair procedures were appropriate in view of the
cause of cracking and the required in-service behavior of the
trusses because further fatigue crack propagation during serv-
ice loading would not be expected.
The cracks in the stem of the tee at the rolled radius and at
the top of the clip angle were in regions carrying negligible
loads in service. This material could be completely coped out
without decreasing the strength of the trusses for in-plane
behavior. Gouging and rewelding was a more than adequate
fix in this region. Drilling holes at the end of the cracks to
eliminate the stress concentration at the sharp crack tip would
also have been a satisfactory fix.
The cracks at the ends of the diagonals were in a stressed
region of the gusset plate. Gouging and rewelding was an
adequate fix in this region. Where sufficient net area and
sound weld remained for full load transfer, drilling holes at
the ends of the cracks also would have provided a satisfactory
repair at the ends of the diagonals. The condition of the crack
with end holes would have then been analogous to any other
situation resulting in a reduced section at this location such
as the presence of bolt holes or a penetration opening through
the gusset.
In summary, the cracks were caused by out-of-plane dy-
namic vibrations during shipment. The in-service trusses
carry in-plane static loads. The cyclic stresses leading to
fatigue crack growth are not present under service conditions
and repaired cracks would not be expected to re-initiate.
In this case study, the fatigue cracks were detected and
repairs performed. It is of interest to postulate the case where
the cracks were not detected and the resulting implications
for in-service performance of the cracked trusses. As men-
tioned above, the cracks in the stem of the tee and at the top
of the clip angle were essentially unstressed. The cracks at the
ends of the diagonals did not reduce the section enough to
govern the load carrying capacity. The cracks would not grow
by fatigue in-service, since the loads would be static. The
existing cracks would not become unstable, under design
loads, so fracture failure would not occur. Thus, for this
particular case, the trusses would be expected to perform
satisfactorily in-service even if the cracks were undetected.
4. CONCLUSIONS AND RECOMMENDATIONS
4.1. Conditions that Lead to Cracking During Shipment
Two conditions must coexist to cause distortion-induced
cracking:
1. an abrupt change in stiffness, and
2. a recurring displacement taking place across this stiff-
ness discontinuity.
In addition, presence of a weld toe within this small region
acts as a crack initiation site and exacerbates the problem.
These conditions conducive to cracking occur most fre-
quently in plate girders, especially where there are small web
gaps. The conditions may also arise for trusses, especially
where thin plates and heavy angles cause severe stiffness
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 90
changes in the gussets. The extent of cracking will depend on
the specific gap configuration, the magnitude of the stress
ranges induced by the distortions, and the number of fatigue
cycles. Particular connection details, plate thicknesses, and
displacements, as well as length of trip, thus all play a role.
4.2. Effect of Cracking in Transit on Structural Performance
When cracking occurs due to a low fatigue resistant detail or
a large initial defect, only one or a few significant cracks are
usually generated. Observation of these cracks allows action
to be taken before cracking occurs at many points in the
structure. Unlike this load-induced crack scenario, distortion-
induced cracks frequently form at the same time in many
locations. This means that many cracks must be repaired. For
cracking that occurs during transit instead of during service,
it may be possible to restrict the number of cracks, depending
on the type of shipment. If a large number of components are
shipped in a similar fashion at the same time by rail, the
possibility exists for many cracks to form simultaneously. For
components shipped by truck, careful examination of compo-
nents from the first truckloads shipped can provide a warning
so that relatively few cracks occur.
Distortion-induced cracking during transit is usually due to
out-of-plane movement. Since components are designed for
in-plane behavior, the cracks usually form parallel to the design
tensile stresses. Such cracks running parallel to the in-service
stresses may not be harmful to the structures performance as
long as they are identified and repaired before they turn perpen-
dicular to the in-service stresses. Repair of these cracks is
frequently straight forward, especially for building components
where cyclic stress are not a major characteristic of in-service
loads. The simplest approach is to drill out the crack tips and
check the capacity of the reduced section to carry design loads.
Gouging and rewelding is another alternative, for building com-
ponents where cracks are located in regions of low in-service
stress and not subject to cyclic stresses, so that repaired cracks
are unlikely to re-initiate. Gouging and rewelding is not an
appropriate repair for bridge members. More care must be taken
in the case of repair of cracked bridge components and case
studies are available in the literature.
1,9,5
4.3. Prevention of Distortion-Induced Cracking During
Transit
When designing connection details and attachments such as
stiffeners, attention should be paid to how the member will
be shipped. Avoid creating short gaps which will be subjected
to differential movement across the gap. If such a gap must
occur, the severity of the stiffness change may be smoothed
out by elongating the gap, making the material in the gap
stiffer (usually by increasing its thickness) and/or making the
material bounding the gap more flexible (usually by decreas-
ing its thickness). Loads should be arranged and blocked
properly to prevent distortions in gaps. Following good prac-
tice by careful inspection of components from the first truck-
loads shipped at the shop and at the site will rapidly identify
transit cracking and avoid costly rejection or rework on many
components. Implementation of these recommendations
should minimize the possibility of distortion-induced crack-
ing during transit.
REFERENCES
1. Fisher, John W., Fatigue and Fracture in Steel Bridges:
Case Studies, John Wiley & Sons, New York, 1984.
2. American Association of State Highway Officials, Guide
Specifications for Fatigue Design of Steel Bridges, Wash-
ington, D.C., 1989.
3. AISC, Manual of Steel Construction, Allowable Stress
Design, 1st ed. Chicago, IL, American Institute of Steel
Construction, 1989.
4. AISC, Manual of Steel Construction, Load and Resis-
tance Factor Design, 9th ed. Chicago, IL, American In-
stitute of Steel Construction, 1986.
5. Kulicki, John M., and Dennis R. Mertz, Case Studies of
Displacement-Induced Fatigue, Sixth Annual Structures
Congress, American Society of Civil Engineers, 1987.
6. Fisher, John. W., and Umur Yuceoglu, Fatigue and Frac-
ture in Steel Bridges: Case Studies, Fritz Engineering
Laboratory Report 448-2(81), Lehigh University, Bethle-
hem, PA, 1981.
7. Demers, Cornelia E. and John W. Fisher, Fatigue Crack-
ing of Steel Bridge Structures, Volume I: A Survey of
Localized Cracking in Steel Bridges1981 to 1988,
FHWA-RD-89-166, Federal Highway Administration,
McLean, VA, 1990.
8. Roddis, W. M. Kim, Heuristic, Qualitative, and Quanti-
tative Reasoning About Steel Bridge Fatigue and Frac-
ture, Ph.D. Thesis, Civil Engineering Department, Mas-
sachusetts Institute of Technology, Cambridge, MA,
1989.
9. Fisher, John W., and Dennis. R. Mertz, Retrofitting Steel
Bridges to Extend Their Fatigue Lives, The 1985 Interna-
tional Engineering Symposium on Structural Steel, Ameri-
can Institute of Steel Construction, Chicago, IL, 1985.
10. Tada, H., P. C. Paris, and G. R. Irwin, The Stress Analysis
of Cracks Handbook, 2nd ed., Paris Productions, Inc., 226
Woodbourne Dr., St. Louis, MO, 1985.
11. AISI Technical Committee on Plates and Shapes, The
Variations of Charpy V-Notch Impact Test Properties in
Steel Plates, American Iron and Steel Institute, Washing-
ton, D.C., 1979.
12. Fisher, J. W., K. H. Frank. M. A. Hirt, and B. M.
McNamee, Effect of Weldments on the Fatigue Strength
of Steel Beams, National Cooperative Highway Research
Program Report 102, Transportation Research Board,
Washington, D.C., 1970.
13. Barsom, John M., and Stanley T. Rolfe, Fracture and
Fatigue Control in Structures, Prentice-Hall, Englewood
Cliffs, New Jersey, 1987.
THIRD QUARTER / 1992 91
INTRODUCTION
After the advent of Hollow Structural Sections (HSS) in
Britain, experimental and theoretical studies on welded con-
nections with square and round members took place at Shef-
field University, leading to the design recommendations of
Eastwood and Wood.
1,2
These were quickly implemented in
Canada and publicized by Stelco
3
in the worlds first HSS
connections manual. Shortly thereafter they were available to
U.S. engineers in an AISI Guide.
4
The more well known
reference document in the U.S. for the design of tubular
connections is Chapter 10 of AWS D1.1.
5
These AWS recom-
mendations originally evolved from a background of practices
and experience with fixed offshore steel platforms of welded
tubular construction. The connection capacities therefore were
expressed with much greater confidence for circular tubes than
for box tubes (square or rectangular hollow sections).
During the 1970s and 1980s a large amount of experimen-
tal and theoretical research on connections between manufac-
tured HSS has taken place in many countries, but almost
exclusively outside the U.S. Much of it has been coordinated
and synthesized by technical committees of CIDECT (Comit
International pour le Dveloppement et lEtude de la Con-
struction Tubulaire) and IIW (International Institute of Weld-
ing). An excellent appreciation of the behavior of welded
connections in HSS trusses has evolved and comprehensive
design recommendations have consequently been issued by
IIW,
6
Kurobane,
7
Wardenier,
8
CIDECT
9,10,11
and Dutta and
Wurker.
12
Very recently an international consensus has been
obtained for LRFD design of statically-loaded, welded con-
nections involving hollow section members in planar
trusses.
13
These IIW recommendations are slightly different
from the 1981 first edition
6
and other versions issued during
the 1980s
8,9,10,12
but have already been partially or fully im-
plemented in several countries. Of particular note is that they
have also been adopted by Eurocode 3
14
which will ensure
widespread acceptance. These recommendations, for T, Y, X,
K and N-connections are given in Tables 1, 1a, 2, 2a, 3 and
3a, for circular and box tubes, and conform to the 1989 IIW
recommendations
13
with some further minor improvements.
In the latest (13th) edition of AWS D1.1 in 1992 these IIW
LRFD recommendations for box sections have been adopted,
with only a few very minor alterations to expressions or
resistances.
15
The AWS
5
design criteria for box connections
are in an ultimate load format, with recommended resistance
factors throughout. For Allowable Stress Design the allow-
able capacity is the ultimate capacity divided by a safety
factor of 1.44 / . Tables 1, 2, and 3 give factored resistances
for design to the AISC LRFD specification,
16
with the resis-
tance factors already included, as also recommended for
Eurocode 3. Previous cross checks performed in Canada by
Packer, et al. for box K and N gap connections,
17
as well as
circular T, Y, K and N gap and overlap connections,
18
have
indicated that very similar calibration coefficients to those
built into Tables 1, 2, and 3 would result for the Canadian
Limit States Design steelwork specification.
19
The Canadian
specification uses partial load factors of 1.25 and 1.50 for
dead and live loads respectively, whereas the AISC LRFD
specification uses 1.2 and 1.6 for the same combination of
gravity loads. Thus these two specifications coincide for a
live-to-dead load ratio of 2:1, and only differ in total factored
loads by five percent at a live-to-dead load ratio of 5:1. Hence,
the factored connection resistances given in Tables 1, 2, and 3
are sufficiently accurate for direct application to the AISC
LRFD specification for structural steel buildings.
16
The mathematical content of these tables may initially
appear forbidding but a large number of load cases and
connection geometries is covered, resulting in only a small
portion of the tables being applicable for a particular connec-
tion. The symbols are defined in the list below and the
application of the design rules is demonstrated by the box
section truss design example. This truss is designed to the
AISC LRFD specification
16
using cold-formed box sections
(or HSS) conforming to ASTM A500 Grade C,
20
for which
the minimum specified yield strength is 50 ksi (345 MPa). A
more complete description of the behavior of HSS connec-
tions and trusses is available elsewhere (e.g., Refs. 8, 10, 21).
When designing HSS trusses one should bear in mind that:
1. Chords should have thick walls rather than thin walls.
* Presented at the 1991 American Institute of Steel Construction National Steel
Construction Conference.
Jeffrey A. Packer is professor, Department of Civil Engineer-
ing, University of Toronto.
J. E. (Ted) Henderson is consultant, Henderson Engineering
Services.
Jaap Wardenier is professor, Faculty of Civil Engineering,
Delft University of Technology.
Load and Resistance Factor Design of
Welded Box Section Trusses*
JEFFREY A. PACKER, J. E. (TED) HENDERSON, and JAAP WARDENIER
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 92
2. Web members should have thin walls rather than thick
walls.
3. The web member should be fairly wide relative to the
chord member, but still able to sit on the flat face of
the chord section, if possible. The outside corner radius
of a North American coldformed box section can be
taken as 2t
i
.
22
4. Gap connections (for K and N situations) are preferred
to overlap connections because the members are easier
to prepare, fit and weld.
NOTATION
A
i
Cross-sectional area of member i (i = 0,1,2,3).
A
V
Effective shear area of the chord (See Table 3).
b
e
Effective width of a web member (See Tables 2
and 3).
b
e(ov)
Effective width for overlapping web member con-
nected to overlapped web member. (See Tables 2
and 3).
b
ep
Effective punching shear width (See Table 3).
b
i
External width of square or rectangular box section
member i (90 to plane of truss). (i = 0,1,2,3).
d
i
External diameter of circular hollow section for
member i (i = 0,1,2,3).
Table 1.
Factored Resistance of Axially Loaded Welded
Connections Between Circular Hollow Sections
Table 1a.
Range of Validity of Table 1
Table 2.
Factored Resistance of Axially Loaded Welded
Connections Between Square or Circular
Web Members and a Square Chord Section
THIRD QUARTER / 1992 93
e Noding eccentricity for a connectionpositive be-
ing towards the outside of the truss.
E Modulus of elasticity.
f
i
Axial stress in member i (i = 0,1,2,3).
f
k
Web buckling stress.
f
yi
Yield strength of member i (i = 0,1,2,3).
f(n), f(n) Functions which incorporate the chord stress in the
connection strength equations.
f
O
Maximum applied axial stress in chord, (or maxi-
mum stress due to axial force and bending moment
where moment is taken into account).
f
Op
Additional stress in chord, other than that required
to maintain equilibrium with web member forces.
g Gap between the web members (ignoring welds)
of a K, N, or KT-connection, at the face of the
chord.
g
Gap divided by chord wall thickness, g = g / t
O
.
h
i
Exter nal depth of square or rectangular box section
member i (in plane of tr uss). (i = 0,1,2,3).
i Subscr ipt to denote member of connection; i = 0
designates chor d; i = 1 refer s in gener al to a web
member for T, Y, and X-connections, or it refer s to
the compression web for K, N, and KT-connec-
tions; i = 2 refers to the tension web for K, N, and
KT-connections, i = 3 refers to the vertical for
KT-connections; i = i refers to the overlapping web
member for K and N-type overlap connections.
j Subscript to denote the overlapped web member
for K and N-type overlap connections.
KL Effective length.
L Length.
P Applied load.
n f
o
f
yo
N
o
A
o
f
yo
+
M
o
S
o
f
yo
n f
op
f
yo
N
op
A
o
f
yo
+
M
o
S
o
f
yo
N
i
Axial force applied to member i (i = 0,1,2,3).
N
i
Connection factored resistance, expressed as an
axial force in member i.
N
O
(in gap)
Reduced axial load resistance, due to shear, in the
cross-section of the chord at the gap.
N
Op
Axial prestressing force in the chord; i.e., load in
the chord not necessary for the equilibrium of the
web members horizontal components.
O
v Overlap, O
v
= q / p 100 percent.
p Length of projected contact area between overlap-
ping web member and chord without presence of
the overlapped web member.
q Length of overlap between web members of a K or
N-connection at the chord face.
S
i
Elastic modulus of member i (i = 0,1,2,3).
t
i
Thickness of hollow section member i (i = 0,1,2,3).
V Applied shear force.
V
p
Shear yield capacity of a section (See Table 3).
Non-dimensional factor for the effectiveness of the
chord flange in shear.
Width or diameter ratio between web member(s)
and chord.
d
1
d
o
,
d
1
b
o
,
b
1
b
o
(T,Y,X)
d
1
+d
2
2d
o
,
d
1
+d
2
2b
o
,
b
1
+b
2
+h
1
+h
2
4b
o
(K,N)
Table 2a.
Range of Validity of Table 2
Note:
a
Outside this range of validity other failure criteria may be governing: e.g., punching shear, effective
width, side wall failure, chord shear or local buckling. If these particular limits of validity are violated the
connection may still be checked as one having a rectangular chord using Table 3, provided the limits of
validity in Table 3a are still met.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 94
d
1
+d
2
+d
3
3d
O
,
d
1
+d
2
+d
3
3b
O
,
b
1
+b
2
+b
3
+h
1
+h
2
+h
3
6b
O
(KT)
Resistance factor.
Half width to thickness ratio of the chord,
=
d
o
2t
o
or
b
o
2t
o
.
Web member depth to chord width ratio, =
h
i
/ b
O
.
i
Included angle between web member i (i = 1,2,3)
and the chord.
Note: When mechanical or geometric properties of members
listed in the Notation are used in LRFD design equations, the
nominal or specified values are to be used.
TRUSS DESIGN PROCEDURE
In summary, the design of a box section (HSS) truss should
be approached in the following way to obtain an efficient and
economical structure.
1. Determine the truss layout, span, depth, panel lengths,
truss spacing, and bracing by the usual methods, but
keep the number of connections to a minimum.
2. Determine loads at connections and on members; sim-
plify these to equivalent loads at the panel points.
3. Determine axial forces in all members, assuming
pinned joints and that member centerlines are all
noding.
4. Determine chord member sizes considering axial load-
ing, corrosion protection, and tube wall slenderness.
(Usual width to thickness ratios are 15 to 25). An
effective length factor of K = 0.9 can be used for the
design of the compression chord.
11
5. Determine web member sizes based on axial loading,
preferably with thickness smaller than the chord thick-
ness. The effective length factor for the web members
can initially be assumed to be 0.75.
11
6. Standardize the web members to a few selected dimen-
sions, (perhaps even two), to minimize the number of
section sizes for the structure. Consider availability of
all sections when making member selections. For aes-
thetic reasons, a constant outside member width may
be preferred for all web members, with wall thickness
varying; but this will require special quality control
procedures in the fabrication shop.
7. Layout the connections, trying gap joints first. Check
that the connection geometry and member dimensions
satisfy the validity ranges for the dimensional parame-
ters given in Tables 2a and 3a, with particular attention
to the eccentricity limits. Consider the fabrication pro-
cedure when deciding on a connection layout.
8. Check the connection factored resistances using equa-
tions given in Tables 2 and 3.
9. If the connection resistances are not adequate, modify
the connection layout (for example, overlap rather than
gap), or modify the web or chord members as appro-
priate, and recheck the connection capacities. Gener-
ally only a few connections will need checking.
10. Check the effect of primary moments on the design of
the chords. For example, use the proper load positions,
(rather than equivalent panel point loading), and deter-
mine the bending moments in the chords by assuming
either: (a) pinned joints everywhere, or (b) continuous
chords with pinended web members. For the compres-
sion chord, also determine the bending moments pro-
duced by any noding eccentricities, by using either of
the above analysis assumptions. Then check that the
factored resistance of all chord members is still ade-
quate, under the influence of both axial loads and
primary bending moments.
11. Check truss deflections at the specified (unfactored)
load level, using the proper load positions.
12. Design the welds.
TRUSS DESIGN EXAMPLE
Figure 1 shows the truss and factored loads along with mem-
ber axial forces, determined by a pin-jointed analysis. The top
Table 3.
Factored Resistance of Axially Loaded Welded
Connections Between Rectangular, Square, or Circular
Web Members and a Rectangular Chord Section
THIRD QUARTER / 1992 95
(compression) chord is considered to be laterally supported
at each purlin position. It will be noticed that this is a modified
Warren truss with vertical members in the central region.
Such a configuration can work well because the verticals
provide support for purlins where the top chord has large axial
loads. Towards the ends, where axial forces are less, bending
loads from purlins can be accepted by a chord section ap-
proximately the same size as that used at the center. This can
reduce the number of different size sections to procure, and
it eliminates several verticals along with their connections, at
the expense of more pounds of material in the chord. Such a
trade-off can be advantageous.
Time will be saved when selecting member sizes by keep-
ing in mind the basic constraints, or limits of validity of
various dimensional parameters, which must be met for con-
nections. (See Tables 2a and 3a.) Also, it can be expedient to
pick sections taking account of the efficiency of the connec-
tions right from the beginning.
Preliminary Member Selections
Central Top Chord: Load in length 8-10 = 319 kips.
KL = 0.9 (73.8 in.) = 66.4 in.
Try 7 7
3
8
in.
Design compressive strength (
c
P
n
) = 389 kips o.k.
(It can be shown later that 7 7
5
16
in. (
c
P
n
= 330 kips)
would be too thin.)
Outer Top Chord: Load in length 4-6 = 192 kips.
KL = 0.9 (147.6 in.) = 132.8 in.
Knowing that the applied forces, (axial load plus bending),
are to be subsequently combined for checking the member as
a beam-column, select a generous size at this stage.
Try 7 7
3
8
in.
Design compressive strength (
c
P
n
) = 340 kips o.k.
(Again, it can be shown later that a 7 7
5
16
-in. (
c
P
n
= 289
kips) would be too thin.)
Central Bottom Chord: Load in member 9-11 is 324 kips.
A
min
= 324 / (0.9 50) = 7.20 in.
2
Try 6 6
3
8
-in., A = 8.08 in.
2
Outer Bottom Chord: Load in member 5-7 is 243 kips.
A
min
= 243 / (0.9 50) = 5.40 in.
2
Try 6 6
5
16
-in., A = 6.86 in.
2
(Once again, it can be shown later that a 6 6
1
4
-in. (A =
5.59 in.
2
) would be too thin.)
Tension Diagonal at end of truss: Load in member 2-3 is 118
kips.
Table 3a.
Range of Validity of Table 3
Fig. 1. Warren truss showing applied loads and resulting member
forces. (Loads between panel points are distributed to the panel
points to determine the bar forces.)
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 96
A
min
= 118 / (0.9 50) = 2.62 in.
2
Try 4 4
3
16
-in., A = 2.77 in.
2
Compression Diagonal at end of truss: Load in member 3-4
is 118 kips.
KL = 0.75 (123 in.) = 92.3 in.
Try 5 5
3
16
-in. Design compressive strength (
c
P
n
) = 127
kips.
Compression Diagonal at middle of truss: Load in member
9-10 is 8.4 kips.
KL = 92.3 in.
Try 2
1
2
2
1
2
1
8
-in. Design compressive strength (
c
P
n
) =
25 kips o.k.
This is probably about the smallest size one would want to
use in a truss this large, especially if one reflects on the
member width relative to the truss depth. Although the AISC
LRFD Manual of Steel Construction
22
does not show that this
HSS size is available, it is available from some tube manu-
facturers (e.g., Welded Tube Company of America).
All Verticals: Load is 13.5 kips.
KL = 0.75 (98.4 in.) = 73.8 in.
Try 2
1
2 2
1
2
1
8-in. Design compressive strength (
c
P
n
) =
32 kips o.k.
Tension Diagonal near truss center: Load in member 8-9 is
25.3 kips.
A
min
= 25.3 / (0.9 50) = 0.56 in.
2
Try 2
1
2
2
1
2
1
8
-in., A = 1.15 in.
2
Compression Diagonal 7-8: Load in member is 42.2 kips.
KL = 92.3 in.
Try 3 3
3
16
-in. Design compressive strength (
c
P
n
) = 53
kips
Diagonals 4-5 and 5-6: Loads are 84.4 kips and 84.4 kips
Use same sections as for members 2-3 and 3-4 to avoid a
multitude of different sizes. (It will also be found later that
diagonal 5-6 needs this size of section, even though the load
is less than for diagonal 3-4).
Tension Diagonal 6-7: Load in member is 59.1 kips
A
min
= 59.1 / (0.9 50) = 1.31 in.
2
Try 3 3
3
16
-in., A = 2.02 in.
2
This section may appear oversize at first but the parametric
requirement for a gap connection at Panel Point No. 6, that
the width of the smaller web member be at least 0.77 (b
1
+
b
2
) / 2 = 0.77 (5 + 3) / 2 = 3.1 in., is already being stretched.
The truss with the trial members is shown in Fig. 2.
Resistance of Gap K Connections
Panel Points No. 3 and No. 5:
Is a gap connection feasible?
h
o
/ b
o
= 1.0, = 53.1, = (4 + 5) / (2 6) = 0.75
Minimum gap allowed = 0.5b
o
(1 ) = 0.75 in.,
or t
1
+ t
2
= 0.375 in. (Table 2a)
Therefore, g
min
= 0.75 in., so use g = 0.75 in.
e [(sin
1
sin
2)
/ sin(
1
+
2
)][(h
1
/ 2sin
1
) +
(h
2
/ 2sin
2
) + g] (h
o
/ 2)
[(0.8 0.8) / 0.96][(5 / 1.6) + (4 / 1.6) + 0.75] (6 / 2)
1.25 in.
Therefore, e / h
o
= 0.21 0.25 o.k. (Table 2a)
Confirm validity of dimensional parameters (See Table 2a).
= 0.75 0.35 o.k.
b
i
= 4 in. or 5 in. 0.77 [(b
1
+ b
2
) / 2] = 3.5 in. o.k.
b
2
/ b
o
= 4 / 6 = 0.67 0.01 (b
o
/ t
o
) + 0.1
= 0.01 (6 / (5 / 16)) + 0.1 = 0.29 o.k.
b
1
/ t
1
= 26.7 1.25 E / f
y1
= 1.25 29,000 / 50
= 30.1 o.k.
b
2
/ t
2
= 4 / (3 / 16) = 21.3 35 o.k.
b
o
/ t
o
= 6 / (5 / 16) = 19.2 15
and 35 o.k.
Determine connection resistance of compression diagonal
(i = 1)
N
1
= 8.9f
yo
t
o
2
[(b
1
+ b
2
) / 2b
o
]
0.5
f(n) / sin
1
(Table 2)
f(n) = 1.0 for a tension chord (Table 2)
Fig. 2. Preliminary selection of truss members with member
loads in kips.
THIRD QUARTER / 1992 97
N
1
8.9(50)(5 / 16)
2
[(4 + 5) / (2 6)]9.6
0.5
/ 0.8
126 kips
N
1
= 118 kips o.k.
Determine connection resistance of tension diagonal (i = 2)
From Table 2 one can see that N
1
sin
1
= N
2
sin
2
, which in this
case means that N
1
= N
2
, therefore N
2
= 126 kips N
2
= 118
kips o.k.
Hence, Panel Points 3 and 5 are acceptable. Note that the
connection resistances would have been insufficient if the
chord had a
1
4
-in. thickness rather than the
5
16
-in. selected.
Panel Point No. 4
A gap connection can again be shown to be feasible, and a
review of the dimensional parameters shows that they are
valid.
The purlin load midway between Panel Points 2 and 4, as
well as midway between Panel Points 4 and 6, will create
bending moments within members 2-4 and 4-6 as well as at
Panel Point 4. An approximation of the chord bending mo-
ment at Panel Point 4 can be obtained by considering the
portion of the top chord from the end of the truss to Panel
Point 6 to be a two-span continuous beam. The moment at
Panel Point 4, the interior support, would then be 0.188PL =
0.188(13.5)(147.6) = 375 kip-in. The forces acting on Panel
Point 4 are shown in Fig. 3.
Determine f(n) for Panel Point No. 4
f(n) 1.3 + (0.4 / )n, but | > 1.0 (Table 2)
= 0.643
n = N
o
/ A
o
f
yo
+ M
o
/ S
o
f
yo
, by definition (see Notation)
= 192 / (9.58 50) + (375) / (19.6 50) = 0.784
f(n) = 1.3 + (0.4 / 0.643)(0.784) = 0.813
Note that only the primary moment due to transverse
loading on the chord, (or purlin loading), was used for M
o
during this connection check. The primary bending moment
due to nodal eccentricity was not included because the eccen-
tricity e is within specified limits for the connection (i.e.,
0.55 e / h
o
0.25 in Table 2a).
Determine connection resistance of compression diagonal
(i = 1)
N
1
8.9f
yo
t
o
2
[(b
1
+ b
2
) / 2b
o
]
0.5
f(n) / sin
1
(Table 2)
8.9(50)(
3
8
)
2
[(5 + 4) / (2 7)](9.33)
0.5
(0.813) / 0.8
125 kips
N
1
118 kips o.k.
Determine connection resistance of tension diagonal (i = 2)
N
2
sin
2
N
1
sin
1
(Table 2)
so N
2
= 125 kips N
2
= 84.4 kips o.k.
Hence, Panel Point No. 4 is acceptable. Note that the
connection resistance of the compression diagonal would
have been insufficient if the chord had a
5
16
-in. thickness
rather than the
3
8
-in. selected.
Panel Point No. 6
Panel Point 6 is similar to Panel Point 4 but has a smaller
tension web member. The validity of the dimensional parame-
ters checks out o.k. and a gap connection is again feasible. At
Panel Point 4, in order to conservatively estimate the primary
bending moment in the chord due to the purlin loads on either
side of the panel point, the chord was considered to be a
two-span continuous beam from Panel Point 2 to Panel
Point 6. By considering the chord as a continuous member
(past Panel Points 4 and 6) which is pin-connected to the web
members, a conservative estimate of the chord bending mo-
ment at Panel Point 6 generated by the purlin loads (P) would
be 0.125PL, or 0.125(13.5)(147.6) = 249 kip-in.
Determine f(n) for Panel Point No. 6.
= (5 + 3) / (2 7) = 0.571
n N
o
/ A
o
f
yo
+ M
o
/ S
o
f
yo
, by definition (See Notation)
279 / (9.58 50) + (249) / (19.6 50) 0.837
f(n) = 1.3 + (0.4 / 0.571)(0.837) = 0.714
Note that the primary moment due to purlin loads away
from the panel points (M
o
) has a negative influence on the
connection strength in this example, by lowering the value of
the term f(n). One could perform the entire truss design by
assuming that all joints were pinned, in which case M
o
= 0
and the connection resistance would thereby be slightly
higher. However, this penalizes the compression chord mem- Fig. 3. Panel Point No. 4.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 98
ber severely when it is designed as a beam-column, since the
maximum member moment increases considerably to the
single-span beam value (0.25PL).
Determine connection resistance of compression diagonal
(i = 1)
N
1
8.9f
yo
t
o
2
[(b
1
+ b
2
) / 2b
o
]
0.5
f(n) / sin
1
(Table 2)
N
1
8.9(50)(
3
8
)
2
[(5 + 3) / (2 7)](9.33)
0.5
(0.714) / 0.8
N
1
97.5 kips
N
1
N
1
84.4 kips o.k.
Note again that the connection resistance of the compres-
sion diagonal would be inadequate with a thinner chord.
Determine connection resistance of tension diagonal (i = 2)
As discussed previously,
N
2
= N
1
for this truss = 97.5 kips N
2
= 59.1 kips
Hence, Panel Point No. 6 is acceptable.
Panel Point No. 8another K-connectioncan likewise be
shown to be acceptable.
Resistance of Top Chord as a Beam-Column between
Panel Points No. 2 and No. 6
Determine nodal eccentricity at Panel Point No. 4
Minimum gap allowed = 0.5b
o
(1 ) 1.25 in., or
t
1
+ t
2
0.375 in. (Table 2a)
Therefore, g
min
= 1.25 in., so use g = 1.25 in. (See Fig. 3)
e [(sin
1
sin
2
) / sin(
1
+
2
)][(h
1
/ 2sin
1
) +
(h
2
/ 2sin
2
) + g] (h
o
/ 2)
[(0.8 0.8) / 0.96][(5 / 1.6) + (4 / 1.6) + 1.25]
(7 / 2) 1.08 in.
(Hence e / h
o
= 0.15 0.25 which is acceptable)
Determine bending moments in the chord at Panel Point 4.
Moment from noding eccentricity
= e [(118 + 84.4) kips] cos = 131 kip-ins.
or 65.6 kip-in. each side of the panel point.
Moment from purlin loads is considered to be 0.188PL at the
connection = 375 kip-in., as discussed previously.
For the design of the compression chord, both the moment
due to transverse loading (purlin loads) and the moment due
to noding eccentricity must be taken into account. Thus,
Fig. 4 shows the moment combinations existing at Panel
Point 4 which are:
375 + 65.6 = 441 kip-in., for chord length 2-4
and 375 65.6 = 309 kip-in., for chord length 4-6.
Determine bending moments under the purlins.
Use of the same model that was employed for the chord
moment at Panel Point 4, (chord being two continuous spans
over the panel point), gives a conservative value of 0.156PL
= 0.156(13.5)(147.6) = 311 kip-in. Figure 4 shows the total
midspan moments under the purlins, which are:
311 65.6 / 2 = 278 kip-in., for chord length 2-4
and 311 + 65.6 / 2 = 344 kip-in., for chord length 4-6.
Member 2-4 Resistance as a Beam-Column
This is governed by Chapter H of the AISC LRFD specifica-
tion,
16
formulas H1-1a and H1-1b, using KL = 0.9 (147.6 in.)
(AISC LRFD Commentary)
P
u
/ (
c
P
n
) = required compressive strength /
compressive resistance (AISC LRFD E2)
= 70.9 / 340.2 = 0.21
Therefore, check that
P
u
c
P
n
+
8
9
M
ux
b
M
nx
_
,
1.0 Eq. H1-1a
where M
ux
is the required flexural strength, (determined
from AISC LRFD Eqs. H1-2, H1-3 and H1-4) and
b
M
nx
is
the flexural resistance of the member (AISC LRFD Section
F1.7)
P
u
c
P
n
+
8
9
M
ux
b
M
nx
_
,
0.21 +
8
9
1.0 441
0.90 1,175
_
,
0.21 + 0.37 0.58 1.0 o.k.
Fig. 4. Simplified bending moments in chord for manual design
as a beam-column. (Moments plotted on tension side of chord and
in kip-in.)
THIRD QUARTER / 1992 99
Member 4-6 Resistance as a Beam-Column
P
u
/ (
c
P
n
) 192 / 340.2 0.56
P
u
c
P
n
+
8
9
M
ux
b
M
nx
_
,
0.56 +
8
9
1.003 344
0.90 1,175
_
,
0.56 + 0.30 0.86 1.0 o.k.
Resistance of X Connections
Panel Point No. 13 is categorized as an X connection because
load is transferred through the chord member. It is assumed
that the width of the load application point on the chord is no
less than the width of the web member on the underside of
the chord (2.5 in.) = 0.357, so Table 2 is applicable. Note
that if > 0.85 one could use Table 3, even though the chord
member is not rectangular.
f(n) 1.3 + (0.4 / )n, but | > 1.0 (Table 2)
f(n) 1.3 + (0.4 / 0.36)(319 / (9.58 50)) 0.56
N
1
f
yO
t
O
2
(1 )sin
1
2
sin
1
+ 4(1 )
0.5
1
1
]
f(n) (Table 2)
N
1
(50 0.375
2
/ 0.643)[0.714 + 4(0.643)
0.5
](0.56)
N
1
= 24.0 kips
N
1
N
1
13.5 kips o.k.
Panel Point No. 10 is also an X connection, transferring the
same force through the chord as in the example above (13.5
kips). The two web members framing into the chord at Panel
Point 10 are both 2
1
2
2
1
8
-in. (as above), but the load will
be dispersed over a greater length along the underside of the
chord, effectively increasing the dimension h
1
of the web
member on one side of the chord and also the connection
resistance. This connection will hence be adequate.
Resistance of KT Overlap Connections
Panel Point No. 7 is a KT connection as shown in Fig. 5. It
can be quickly seen that a gap connection is not feasible
within the nodal eccentricity limits, so an overlap connection
will be necessary. Overlap the vertical member onto the
diagonals, with 25 percent of the vertical member width
sitting on each diagonal.
Confirm validity of parameters
b
3
/ b
O
= 2.5 / 6
= 0.42 0.25 o.k. (Table 2a for overlap connections)
b
3
/ b
j
= 2.5 / 3 = 0.83 0.75 o.k.
t
3
/ t
j
= 0.125 / 0.1875 = 0.67 1.0 o.k.
b
1
/ t
1
= 3 / 0.1875 = 16 1.1 E / f
y1
= 26.5 o.k.
b
3
/ t
3
= 2.5 / 0.125 = 20 1.1 E / f
y3
= 26.5 o.k.
b
2
/ t
2
= 3 / 0.1875 = 16 35 o.k.
b
o
/ t
o
= 6 / 0.375 = 16 40 o.k.
25 percent overlap 100 percent o.k.
0.55 e / h
o
= 0.05 0.25 o.k.
N
3
f
y3
t
3
[(O
v
/ 50)(2h
3
4t
3
) + b
e
+ b
e(ov)
]
b
e
= 0 because neither flange of the vertical lands on
the chord, but there will be two b
e(ov)
terms.
b
e(ov)
[10 / (b
j
/ t
j
)](t
j
/ t
3
)b
3
[10 / (3 / 0.1875)](0.1875 / 0.125)2.5 2.34
N
3
= (50)(0.125)[0.5(5 0.5) + 2.34 + 2.34] = 43.3 kips
N
3
= 13.5 kips
Now confirm that the connection efficiency of the overlapped
members does not exceed that of the overlapping member.
(See note at bottom of Table 2 for overlap connections.)
Efficiency of the vertical is N
3
/ (A
3
f
y3
)
= 43.3 / (1.15 50) = 0.75
Hence, efficiency of diagonal cannot exceed 0.75.
So, N
2
= 0.75(2.02)(50) = 76.1 kips N
2
= 59.2 kips o.k.
Therefore, Panel Point 7 is acceptable.
Panel Point No. 9 is another KT connection, similar to Panel
Point No. 7. A repeat of the previous calculations for the
members of this panel point also shows that this connection
is acceptable.
SUMMARY
The design of a welded planar truss has been demonstrated
using cold-formed Hollow Structural Section, or box section,
members complying with ASTM A500 Grade C. Effective Fig. 5. KT Connection at Panel Point No. 7.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 100
lengths for compression members are in accordance with the
latest CIDECT recommendations and member design is per-
formed to the AISC LRFD specification. Specific connection
checks are illustrated for gap K connections, X connections
and KT (overlap) connections, in accordance with the most
recent IIW/CIDECT recommendations (1990). These recom-
mendations, for box sections, have also been adopted in the
U.S. in 1992 by AWS D1.1. It is demonstrated that in order
to avoid reinforcement of the connections, the structural
designer must perform connection design at the same time
that member selection is made, as the connections frequently
control member dimensions.
REFERENCES
1. Eastwood, W., and A. A. Wood, Welded Joints in Tubular
Structures Involving Rectangular Sections, Conference
on Joints in Structures, Session A Paper 2, University of
Sheffield, England, 1970.
2. Eastwood, W., and A. A. Wood, Recent Research on Joints
in Tubular Structures, Canadian Structural Engineering
Conference, Toronto, Canada, 1970.
3. Stelco, Hollow Structural SectionsDesign Manual for
Connections, 1st ed., Stelco Inc., Hamilton, Canada,
1971.
4. Sherman, D. R., Tentative Criteria for Structural Appli-
cations of Steel Tubing and Pipe, Committee of Steel Pipe
Producers, American Iron and Steel Institute, Washing-
ton, D.C., August 1976.
5. American Welding Society, Structural Welding Code
Steel, ANSI/AWS D1.1-92, 13th. ed., AWS, Miami,
Florida.
6. International Institute of Welding Subcommission XV-E,
Design Recommendations for Hollow Section Joints
Predominantly Statically Loaded, 1st. ed., IIW Doc. XV-
491-81, International Institute of Welding Annual Assem-
bly, Oporto, Portugal, 1981.
7. Kurobane, Y., New Developments and Practices in Tubu-
lar Joint Design, IIW Doc. XV-488-81 + Addendum,
Kumamoto University, Japan, 1981.
8. Wardenier, J., Hollow Section Joints, Delft University
Press, Delft, Netherlands, 1982.
9. CIDECT, Construction with Hollow Steel Sections, Brit-
ish Steel Corporation, Corby, England, 1984.
10. CIDECT, The Strength and Behaviour of Statically
Loaded Welded Connections in Structural Hollow Sec-
tions, CIDECT Monograph No. 6, ed. T. W. Giddings and
J. Wardenier, British Steel Corporation, Corby, England,
1986.
11. Wardenier, J., Y. Kurobane, J. A. Packer, D. Dutta, and N.
Yeomans, Design Guide for Circular Hollow Section
(CHS) Joints under Predominantly Static Loading,
CIDECT, Germany, April 1990.
12. Dutta, D., and K. Wurker, Handbuch Hohlprofile in
Stahlkonstruktionen, Verlag TUV Rheinland, Kln, Ger-
many, 1988.
13. International Institute of Welding Subcommission XV-E,
Design Recommendations for Hollow Section Joints
Predominantly Statically Loaded, 2nd ed., IIW Doc. XV-
701-89, International Institute of Welding Annual Assem-
bly, Helsinki, Finland, 1989.
14. Eurocode 3 Editorial Group, Industrial Processes Build-
ing and Civil Engineering Eurocode No. 3: Design of
Steel Structures: Part IGeneral Rules and Rules for
Buildings, Preliminary Version / 3rd. printing, London,
1988.
15. Marshall, P. W., J. A. Packer, and D. R. Sherman, Pro-
posed Revision to Tubular Connection Design Rules,
Report of AWS D1.1 Subcommittee 6 on Tubular Struc-
tures, American Welding Society Spring Meeting, Savan-
nah, Georgia, March 1989.
16. American Institute of Steel Construction, Load and Re-
sistance Factor Design Specification for Structural Steel
Buildings, AISC, Chicago, September 1986.
17. Packer, J. A., P. C. Birkemoe, and W. J. Tucker, Canadian
Implementation of CIDECT Monograph No. 6, CIDECT
Final Report SAJ-84/9-E, University of Toronto, Canada,
1984.
18. Packer, J. A., and J. S. M. Kremer, A Reliability Assess-
ment of Tubular Joint Specifications, Canadian Journal
of Civil Engineering, Vol. 15, No. 2., 1988, pp. 167175.
19. Canadian Standards Association, Limit States Design of
Steel Structures, CAN/CSA-S16.1-M89, Toronto, Can-
ada, December 1989.
20. American Society for Testing and Materials, Standard
Specification for Cold-Formed Welded and Seamless
Carbon Steel Structural Tubing in Rounds and Shapes,
ASTM A500, Philadelphia, 1987.
21. Packer, J. A., and J. E. Henderson, Design Guide for
Hollow Structural Section Connections, Canadian Insti-
tute of Steel Construction, Toronto, Canada, June 1992.
22. American Institute of Steel Construction, Manual of Steel
ConstructionLoad and Resistance Factor Design, 1st.
ed., AISC, Chicago, 1986.
THIRD QUARTER / 1992 101
INTRODUCTION
In the buckled configuration of a built-up compression mem-
ber, shear force is developed between individual components
due to secondary moments caused by P effect. AISC-ASD
1
requires that stitches be designed such that they have adequate
strength to resist the shear force developed between individ-
ual components. AISC-LRFD
2
also has a similar requirement
(see Section E4, p. 6-40). However, neither specification
gives a procedure to calculate the shear force developed
between individual components in a buckled configuration.
This paper presents a derivation of analytical equations to
calculate the shear force developed between individual com-
ponents of built-up struts in buckled configuration. The equa-
tions are presented for two cases. First, for the case in which
only the first buckling load is of interest. Second, for the case
in which, in addition to the first buckling load, post-buckling
bending is involved such as in seismic-resistant design. The
proposed equations are general enough so that they are appli-
cable to any end condition including the two extreme cases
of hinged- and fixed-end conditions.
The proposed equations are verified analytically and ex-
perimentally. For analytical verification, the results from the
proposed equations are examined for the extreme cases of end
conditions and separation between the components. For ex-
perimental verification, test results by the authors are used.
3,4
The stitch strength required for some test specimens are
calculated according to the proposed equations. The results
are compared with actual strength provided by the stitch
welds of the corresponding specimens. It was found that
specimens which suffered unsymmetrical buckling and/or
post-buckling behavior did not have adequate stitch strength
according to the proposed equations.
1. NOTATION
Following notations are used in this paper:
a The distance between batten plates or stitches.
A
i
Cross sectional area of each individual component.
A Cross sectional area of the member = 2A
i
.
Separation ratio = h / 2r
ib
.
E Youngs modulus of elasticity.
f Lateral deflection at mid-span in buckled configuration
(maximum lateral deflection).
F
S
Total shear force developed between individual
components.
F
S
cr
Total shear force developed between individual compo-
nents at the time of first buckling.
F
S
Pb
Maximum Total shear force developed between individ-
ual components in post-buckling range.
I
ib
Moment of inertia of individual components about their
own centroidal axis parallel to the plane of buckling (y-y
axis) = A
i
(r
ib
)
2
I
t
Moment of inertia of the overall section about the cen-
troidal axis parallel to the plane of buckling (y-y axis).
K Effective length factor.
M
Moment acting on the member due to P effect.
M
P
Overall plastic moment capacity of the section.
P Axial compression load sustained by the member.
P
cr
Overall buckling load of built-up section.
Q Maximum static moment of area of the overall section
about the centroidal axis parallel to the plane of buckling.
cr
Buckling stress.
p
Compression stress in the concave-side component in
buckled configuration.
y
Yielding stress of the material.
t Shear flow between individual components due to bend-
ing in buckled configuration.
y Lateral deflection of the strut in buckled configuration.
2. ANALYTICAL CRITERIA FOR
STITCH STRENGTH
Analytical equations will be derived for the two cases of
hinged- and fixed-end conditions. The result will then be used
to develop a single equation which covers general end
conditions.
2.1. Hinged-End Conditions
Figure 1 shows the buckling configuration of a hinged-end
strut. The total shear force between individual components of
a built-up strut is derived in the following. The buckling shape
can be represented by:
Farhang Aslani is staff engineer, Automated Analysis Corp,
Ann Arbor, MI.
Subhash C. Goel is professor of civil engineering, University
of Michigan, Ann Arbor, MI.
Analytical Criteria for Stitch Strength of
Built-up Compression Members
FARHANG ASLANI and SUBHASH C. GOEL
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 102
y f sin
x
L
(1)
The slope of the buckling shape, y, is given by:
y
dy
dx
f
L
cos
x
L
(2)
The secondary moment in buckled configuration is:
M Py (3)
The shear force caused by bending can be expressed by,
V
dM
dx
d(Py )
dx
Py
f
L
P cos
x
L
The shear flow between individual components is:
t
VQ
I
t
f
L
Q
I
t
P cos
x
L
(4)
The shear force developed between individual components
over the half length can be determined as:
F
s
2
0
L
2
t dx
f
L
Q
I
t
P
0
L
2
cos
x
L
dx
f
L
Q
I
t
P
L
or
F
s
2f
Q
I
t
P (5)
a. Consideration of the First Buckling Load
To derive the expression for lateral deflection, f, at the onset
of buckling, a procedure similar to that presented by Bleich
will be followed (Ref. 5, Eq. 354). In buckled configuration,
the total compression stress in the concave side component
can be approximated as:
p
P
cr
2A
i
+
M / h
A
i
cr
+
P
cr
f
A
i
h
The lateral deflection can be expressed as:
f
p
cr
P
cr
A
i
h (6)
The above equation gives the lateral deflection at mid-span
and is applicable to all struts with any symmetrical end
condition. Equation 5 indicates that the amount of shear
developed between individual components increases as the
lateral deflection increases. If only the first buckling load is
of interest, however, it is reasonable to consider the value of
f when the stress in concave-side component reaches its
maximum value possible, that is the yield stress
y
. Thus,
substitution of
y
for
p
in Eq. 6 results in:
f
y
cr
P
cr
A
i
h (7)
Substituting the above equation into Eq. 5 and replacing P by
P
cr
results in:
F
S
cr
2
y
cr
P
cr
A
i
h
Q
I
t
P
cr
2A
i
(
y
cr
)
Qh
I
t
F
S
cr
(P
y
P
cr
)
Qh
I
t
(8)
Maximum static moment of area is expressed as:
Q A
i
h / 2 (9)
The total moment of inertia I
t
can be written as:
I
t
2I
ib
+ 2[A
i
(h / 2)
2
]
Replacing A
i
by I
ib
/ r
ib
2
,
I
t
2I
ib
+ 2
I
ib
r
ib
2
(h / 2)
2
1
1
]
2I
ib
[1 + (h / 2r
ib
)
2
]
The ratio h / 2r
ib
is commonly called separation ratio,
h
2r
ib
Thus,
I
t
2I
ib
(1 +
2
) (10)
Combining Eqs. 9 and 10, the ratio Qh / I
t
can be expressed
as:
Qh
I
t
(A
i
h / 2)h
2A
i
r
ib
2
(1 +
2
)
(h / 2r
ib
)
2
2
+ 1
Using the definition h / 2r
ib
leads to:
Qh
I
t
2
+ 1
(11)
Substitution of Qh / I
t
from the above equation into Eq. 8
results in,
F
S
cr
2
+ 1
(P
y
P
cr
)
2
+ 1
P
y
1
P
cr
P
y
_
,
(12)
It should be noted that the above equation gives the total
shear force developed between the two individual compo-
Fig. 1. Symmetric buckling shape of a hinged-end strut.
THIRD QUARTER / 1992 103
nents while the distribution of the shear flow shown in Fig. 2.
Nonetheless, the stitch strength over the full length must be
such that it can resist the total shear force given by Eq. 12.
b. Consideration of Post-Buckling Range
In seismic design, in addition to the first buckling load, the
behavior of built-up struts in post-buckling range is of interest
as well. In post-buckling range, the value of f exceeds the
value associated with yield stress in the concave-side compo-
nent. According to Eq. 5, shear force developed between the
individual components increases as f increases. On the other
hand, as the deflection f increases, the axial load sustained by
the member decreases. The free body diagram shown in Fig.
3 gives the relationship between the plastic moment capacity
of a strut and the axial load sustained by the member. Thus,
if conservatively the reduction of plastic moment capacity
due to the presence of axial load is neglected, the following
equation gives the relationship between f, plastic moment
capacity M
p
, and sustained axial force P,
f
M
p
P
(13)
Substitution into Eq. 5 results in:
F
S
Pb
2
M
p
P
Q
I
t
P 2M
p
Q
I
t
(14)
From Eq. 11, the ratio Q / I
t
can be expressed as:
Q
I
t
2
h(
2
+ 1)
(15)
Substitution of Q / I
t
ratio into Eq. 14 leads to:
F
S
Pb
2
2
2
+ 1
M
p
h
(16)
2.2. Fixed-End Conditions
Figure 4a shows the buckling configuration of a fixed-end
strut. The total shear force between individual components of
a built-up strut can be derived as follows. The buckling shape
can be represented by:
y
f
2
1 cos
2x
L
_
,
The above equation satisfies the geometric boundary con-
ditions. The bending moment, denoted by M, is different from
that of a hinged-end member, since the end fixity causes
non-zero moments at the two ends. The equation for bending
moment at a given section is,
M Py + M
e
P
f
2
1 cos
2x
L
_
,
+ M
e
(17)
The term M
e
can be determined by basic mechanics ap-
proach in which the moment equation is integrated twice to
derive the expression for the deflection curve. Then, the
boundary conditions are imposed to determine the constants
of integration as well as the end moment M
e
. Such a procedure
results in:
M
e
P
f
2
Substitution of M
e
in Eq. 17 results in:
M P
f
2
1 cos
2x
L
_
,
P
f
2
P
f
2
cos
2x
L
(18)
The above equation gives the moments at the ends and at mid
span as:
M(x 0) Pf / 2
Fig. 2. Shear flow in a hinged-end strut due to
secondary moment caused by P effect.
Fig. 3. Free body diagram of a half length hinged-end strut
in post-buckling range.
Fig. 4a. Symmetric buckling shape of a fixed-end strut.
Fig. 4b. Free body diagram of a half length,
fixed-end strut after buckling.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 104
M(x L / 2) P
f
2
(1 cos ) Pf / 2 +Pf / 2
The above two expressions for moment at the ends and at
mid-span can be verified by checking the equilibrium equation
of the free body diagram shown in Fig. 4b. Therefore, for a
fixed-ended strut, the shear force caused by bending is given by:
V
dM
dx
f
L
P sin
2x
L
(19)
The shear flow between the two individual components is:
t
VQ
I
t
f
L
Q
I
t
P sin
2x
L
(20)
The shear force developed between individual components
over the half length is:
F
S
2
0
L
2
t dx
f
L
Q
I
t
P
sin
0
L
2
2x
L
dx
f
L
Q
I
t
P
L
F
S
2f
Q
I
t
P (21)
It is interesting to note that the above equation is identical
to Eq. 5 which was derived for hinged-end case.
a. Consideration of the First Buckling Load
Since Eqs. 5 and 21 are identical, the shear force developed
between individual components at the time of the first buck-
ling is identical. Thus,
F
S
cr
2
+ 1
P
y
1
P
cr
P
y
_
,
(22)
b. Consideration of Post-Buckling Range
For the case in which, in addition to the first buckling load,
post-buckling behavior is also of interest, the procedure is
different from that of a hinged-end strut only in one step. The
difference is that, according to the free body diagram of
Fig. 5, the P moment is resisted by 2M
p
instead of M
p
for
hinged-end case. Thus,
f
2M
p
P
(23)
Substitution into Eq. 21 results in,
F
S
Pb
2
2M
p
P
Q
I
t
P 4M
p
Q
I
t
Substituting for Q / I
t
from Eq. 15 results in,
F
S
Pb
4
2
2
+ 1
M
p
h
(24)
A comparison between Eqs. 16 and 24 shows that F
S
Pb
for the
fixed-end case is twice of that for hinged-end case.
2.3 General End Conditions
a. Consideration of the First Buckling Load Only
Comparison of Eqs. 12 and 22 shows that end conditions do
not change the shear force developed between individual
components at the time of first buckling. Thus, for general
end conditions the same equation can be used to give the shear
force developed between individual components at the time
of first buckling.
F
S
cr
2
+ 1
P
y
1
P
cr
P
y
_
,
(25)
Equation 25 gives the total shear force for which the
stitches or batten plates should be designed in order to have
a first buckling load identical to that of an integral section
with a moment of inertia equal to I
t
. It should be noted that
Eq. 25 is derived by using an ultimate strength approach
which is the basis of AISC-LRFD (1986). Thus, it is conven-
ient to calculate P
cr
by LRFD formulas and substitute for it in
Eq. 25 to find F
S
cr
. If AISC-ASD formulas are used, the factor
of safety should not be included in the calculation of P
cr
.
b. Consideration of Post-Buckling Range
Comparison of Eqs. 16 and 24 indicates that the two equations
are different only by a factor of 2 in the numerator. Thus, for
a general end condition, the equation can be given as:
F
S
Pb
2
2
K(
2
+ 1)
M
p
h
(26)
Equation 26 gives the total shear force for which the
stitches or batten plates may be designed to prevent premature
stitch failure which is detrimental to post-buckling behavior.
It is recommended that the calculated stitch strength be evenly
distributed along the full length of the member in order to
prevent possible individual bending of the two components
between the stitches. One interesting note about Eq. 26 is that
the shear force developed between individual components is
linearly proportional to the force M
p
/ h which, when acting
as a couple, applies the moments M
p
to the section. The force
M
p
/ h, after being modi fied by the coeffici ent of
2
2
/ K(
2
+ 1), becomes the shear force developed between
individual components due to bending.
Fig. 5. Free body diagram of a half length, fixed-end
strut in post-buckling range.
THIRD QUARTER / 1992 105
3. RECOMMENDATIONS FOR STITCH SPACING
Equations 25 and 26 can be used to determine the strength
that should be provided by the stitches. Two approaches can
be taken as shown in Fig. 6. First, the required strength can
be distributed evenly and continuously along the full length
of the member, i.e., having a continuous stitch with zero stitch
spacing as shown in Fig. 6a. Second, the required strength can
be distributed evenly but intermittently along the full length
of the member, i.e., having intermittent stitches with a non-
zero weld spacing as shown in Fig. 6b. However, previous
studies
6,7
indicated that stitch spacing per current code mini-
mum requirement leave boxed angles susceptible to unsym-
metric buckling and post-buckling bending mode which re-
sult in early failure with much reduced energy dissipation
capacity. Furthermore, it was found that smaller stitch spacing
in boxed-angles increased the first buckling load and also
enhanced the overall member performance due to response
closer to that of an integral section. Also, continuous stitch
plate significantly enhanced the performance of boxed angles
by virtually eliminating section distortion and local buckling,
thus, resulting in a much longer fracture life. Generally, for
boxed sections made of 2L33
3
8
-in. double angles as used
in the study, a stitch spacing of 12 inches resulted in excellent
performance.
Therefore, the required stitch strength according to Eqs. 25
or 26 is recommended to be distributed evenly along the full
length of the member.
4. VERIFICATION OF THE PROPOSED
EQUATIONS
4.1. Analytical Verification
Equation 25 gives the total shear force for which the stitches
or batten plates can be designed, for the case in which only
the first buckling load is of interest. Likewise, Eq. 26 gives
the total shear force for which the stitches or batten plates can
be designed for the case in which, in addition to the first
buckling load, post-buckling behavior is of interest as well.
To validate the the proposed equations, the numerical results
from these two equations were studied with respect to two
parameters, separation ratio and slenderness ratio. The results
are discussed in the following two sections.
a. Separation Ratio
Figure 7 shows the variation of the shear force coefficient,
C, predicted by Eqs. 25 and 26. The figure also shows two
rational results for the two extreme cases of large and zero
separation between the two components. First, as separation
ratio increases, the coefficient
2
/ (
2
+ 1) approaches its
maximum value of 1.0 for which Eqs. 25 and 26 give the
maximum shear force. It is reasonable to have large shear
force for the cases where the distance between individual
components is large. On the other extreme, as separation ratio
approaches zero, the coefficient
2
/ (
2
+ 1) approaches zero
for which the proposed equations give zero shear force. This
is also a reasonable result indicating no shear force for the
case where the centroidal axis of the two components coin-
cide with each other. This case, theoretically, is identical to
the case of in-plane buckling of a built-up strut in which no
shear force is developed between individual components
since they are acting in parallel.
b. Slenderness Ratio
A typical column strength curve is shown in Fig. 8. Stocky
members with small slenderness ratio buckle inelastically and
the buckling load P
cr
is close to the yield load, P
y
. Thus, the
coefficient (1 P
cr
/ P
y
) is close to zero. Equation 25 indicates
Fig. 6 Continuous and intermittent stitch weld in boxed angles.
Fig. 7. Variation of shear force coefficient developed
between the two components of built-up struts.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 106
that a smaller stitch strength is required as the coefficient
(1 P
cr
/ P
y
) becomes smaller. This is reasonable since, for
stocky members, stability and consequently shear flexibility
presents no problem. Instead, yielding is the dominant phe-
nomenon and the member failure is governed by yielding
before any buckling occurs.
On the other extreme, Fig. 8 indicates that members with
large slenderness ratio buckle elastically and the buckling
load P
cr
is much smaller than the yield load, P
y
. Thus, the term
(1 P
cr
/ P
y
) is close to 1. Equation 25 indicates that a larger
stitch strength is required as the coefficient (1 P
cr
/ P
y
)
increases. This is also reasonable since, for slender members,
yielding is not involved. Instead, the member failure is gov-
erned by elastic buckling. Since buckling load is highly
dependant on the buckling shape, the member should have
adequate stitch strength to ensure transfer of large shear force
between the two components.
4.2. Experimental Verification
Table 1 shows the geometric properties of five specimens
from previous experimental study by the authors.
3,4
The stitch
strength of these five specimens are checked against those
required by the proposed equations. In general, the results
show that those specimens, which did not have adequate
strength, had unsymmetrical buckling and post-buckling be-
havior. It should be noted that, in all calculations, the value
of P
cr
/ P
y
is the one obtained from the corresponding test.
However, in a design procedure, the value of P
cr
/ P
y
can be
calculated by any rational formula. For Specimen AXH12,
the detailed calculations according to Eqs. 25 and 26 are
presented here. However, the final results for other specimens
are summarized in Table 2.
a. Specimen AXH12
Specimen AXH12 had nine 2-in. long
1
4
-in. stitch welds every
12 inches. For E70 electrodes, the ultimate strength of weld
metal in shear is taken as 60 / 3. If the two end gusset plates
are counted as two stitches, the ultimate shear capacity pro-
vided by the eleven 2-in. long stitch welds is,
R
w
(.707)(
1
4
)(11 2)
60
3
_
,
135 kips
The distance between the centroids of the two components is,
h = 2[(3cos 45) (0.888 / cos 45) + (
3
8
cos 45)]+
5
8
= 2.886 in.
The separation ratio for the section is calculated as:
h
2r
ib
2.886
2(0.587)
2.46
The required shear strength according to Eq. 25 is,
F
S
cr
2
+ 1
P
y
1
P
cr
P
y
_
,
(2.46)
2
(2.46)
2
+ 1
(47 4.22)(1 0.94)
10 kips < R
w
135 kips o.k.
Consistent with the above calculation, no individual com-
ponent behavior was observed at the first buckling of speci-
men AXH12. The plastic moment capacity of the section is,
Fig. 8. General column strength curve according to LRFD.
2
Table 1.
Geometric Properties of the Test Specimens
Specimen
(1)
End
Condition
(2)
Section
(3)
A
(in.
2
)
(4)
KxL
rx
(5)
KyL
ry
(6)
Stitch Weld
Length (in.)
(7)
Number of
Stitches
(8)
Stitch Plate
Spacing (in.)
(9)
AB4
Hinged
2L3.5 2.5
3
8
4.22
60 95 2 2 37
AXH12
2L3 3
3
8
57 83
2 9 0
AXH13 2 2 37
AXFS16
Fixed 6.72 56 58
110 0
AXFS17 2 9 0
THIRD QUARTER / 1992 107
M
p
(A
i
F
y
)h 2.11(47)(2.886) 286 kip-in.
For the post-buckling range, the required shear strength ac-
cording to Eq. 26 is,
F
S
Pb
2
2
K(
2
+ 1)
M
p
h
2(2.46)
2
(2.46)
2
+ 1
1
1
]
286
2.886
1
1
]
170 kips > R
w
135 kips n.g.
However, no individual component behavior or stitch failure
occurred in the post-buckling range for this specimen. This
may be attributed to the conservative use of unmodified value
of the plastic moment capacity M
p
, whereas, it may be reduced
by about 20 percent due to the presence of axial compression
load. If such a reduction in the plastic moment capacity is
considered, it follows that,
F
S
Pb
= 80% (170) = 136 vs. R
w
= 135 kips almost o.k.
b . Specimen AXH13
Table 1 shows that Specimen AXH13 did not have adequate
stitch strength for the first buckling load as well as for the
post-buckling range. Consistent with the prediction by Eqs.
25 and 26, individual component bending was observed at the
first buckling of specimen AXH13 which caused the occur-
rence of unsymmetrical buckling mode. The individual bend-
ing of the two angle components in Specimen AXH13 is
shown in Fig. 9.
c. Specimen AB4
Table 1 indicates that Specimen AB4 had adequate stitch
strength for the first buckling load. Consistent with the pre-
diction by Eq. 25, individual bending was not observed at the
first buckling of specimen AB4. However, Table 1 shows that
the specimen did not have adequate stitch strength for the
post-buckling range. Unlike the boxed specimen AXH13,
Table 2.
Stitch Strength of the Test Specimens
Specimen
(1)
Weld
Dimension
(in.)
(2)
Weld
Strength
(kips)
(3)
Component
Separation, h
(in.)
(4)
Separation
Ratio,
(5)
Yield
Capacity, Py
(6)
Plastic Moment
Capacity,
(kip-in.)
(7)
FS
cr
(Eq. 25)
(8)
FS
Pb
(Eq. 26)
(9)
AXH12 0.25 135
2.886 2.46
198 286 10 170
AXH13 0.25 49 184 266 56 158
AB4 0.25 49 1.950 1.35 198 194 51 128
AXFS16 0.25 673
2.886 2.46
309 447 34 531
AXFS17 0.25 135 312 451 40 536
Fig. 9. Unsymmetric buckling of Specimen AXH13.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 108
Specimen AB4 did not suffer unsymmetric post-buckling
mode. This is attributed to the fact that local buckling is the
weakest mode in back-to-back angles. Therefore, local buck-
ling occurs instead of an unsymmetric mode (Aslani and
Goel, 1991). In other words, in back-to-back angles with
inadequate shear strength which is needed for an integral
behavior, the unsymmetric mode is not triggered off since
local buckling is the dominant and governing mode. Boxed
specimen AXH13, however, had much less potential for local
buckling due to its supported edges in the boxed section
configuration.
d. Specimen AXFS16
Table 1 indicates that Specimen AXFS16 had adequate stitch
strength for the first buckling load as well as for the post-
buckling range. Consistent with the prediction by Eqs. 25 and
26, no individual behavior was observed in Specimen
AXFS16.
e. Specimen AXFS17
Table 1 indicates that Specimen AXFS17 had adequate stitch
strength for the first buckling load. Consistent with the pre-
diction by Eq. 25, individual bending was not observed at the
first buckling of specimen AXFS 17. However, Table 1 indi-
cates that the specimen did not have adequate stitch strength
for the post-buckling range. Consistent with the prediction by
Eq. 26, specimen AXFS 17 suffered stitch failure followed by
individual component behavior in the post-buckling range.
The shear failure of stitches in Specimen AXFS 17 is shown
in Figs. 10 and 11.
CONCLUSIONS
1. Built-up compression members are susceptible to indi-
vidual behavior of their components. Equation 25 can be
used to calculate the required stitch strength to ensure a
symmetric first buckling mode.
2. For seismic design, Eq. 26 can be used to calculate the
required stitch strength to ensure a symmetric integral
behavior in the post-buckling range.
ACKNOWLEDGMENTS
The investigation was sponsored by the National Science
Foundation through Grant No. ECE8610963 for which the
authors are most grateful. Partial support received from the
American Institute of Steel Construction is also acknow-
ledged. The conclusions and opinions expressed in this paper
are solely those of the authors and do not necessarily represent
the views of the sponsors.
REFERENCES
1. American Institute of Steel Construction, Steel Construc-
tion Manual, 8th Ed., Chicago, IL, 1980.
2. American Institute of Steel Construction, Load and Resis-
tance Factor Design, 1st Ed., Chicago, IL, 1986.
3. Aslani, F. and Goel, S. C., Stitch Spacing and Local
Buckling in Seismic Resistant Double-Angle Braces, Ac-
cepted for publication in Journal of the Structural Division,
ASCE, 1991.
4. Aslani, F., and Goel, S. C., Experimental and Analytical
Fig. 10. Shear failure of two stitches in Specimen AXFS17.
Fig. 11. Failure of Specimen AXFS17.
THIRD QUARTER / 1992 109
Study of the Inelastic Behavior of Double Angle Bracing
Members Under Cyclic Loading, Report No. UMCE 89-5,
Department of Civil Engineering, University of Michigan,
Ann Arbor, Michigan, February 1989.
5. Bleich, F., Buckling Strength of Metal Structures, McGraw-
Hill Book Company, 1952, pp. 176179.
6. Aslani, F. and Goel, S. C., An Analytical Criterion for
Buckling Strength of Built-up Compression Members,
Submitted for publication in Engineering Journal, AISC,
1991.
7. Libove, C., Sparsely Connected Built-Up Columns,
Journal of the Structural Division, ASCE, Vol. 111(3),
1985.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 110
In theory at least, the design of a column or of a beam-column
starts with the evaluation of the elastic restraints at both ends
of the column, from which the effective length factor K is then
derived. To get a K-factor, the designer is much more likely
to use the two charts provided in the Column Design section
of the AISC Manuals,
1,2
rather than to solve the transcendental
equations on which the charts are based.
However, having to read K-factors from an alignment chart
in the middle of an electronic computation, in a spreadsheet
for instance, prevents full automation and can be a source of
errors. The fact that spreadsheets cannot accept so-called
circular references makes their use awkward for the automatic
solution of transcendental equations. A side benefit of an
excellent article by Barakat and Chen
3
was the demonstration
of how powerful an engineering tool the electronic spread-
sheet can be: it automates many routine calculations, and it is
well suited for tedious column and beam-column calcula-
tions. Barakat and Chen did not elaborate on how they ob-
tained the K-factors used in their examples; from the context,
it seems that the factors were manually entered into the
spreadsheet. Obviously, it would be convenient to have sim-
ple equations take the place of the charts in the AISC Manuals.
The American Concrete Institute
4
does publish equations, but
their lack of accuracy may be why they seem not to be used
in steel design. Better equations have been available in the
French Design Rules for Steel Structures
5
since 1966, and
have been included in the European Recommendations
6
of
1978, with only a change in notation. These equations are
accurate, yet simple enough to be easily programmed within
the confines of a spreadsheet cell. For this reason, they may
be useful to North American engineers.
1. EXACT AND APPROXIMATE EQUATIONS
Consider a column AB elastically restrained at both ends. The
rotational restraint at one end, A for instance, is represented
by a restraint factor G
A
, expressing the relative stiffness of all
the columns connected at A to that of all the beams framing
into A:
G
A
=
(I
c
/ L
c
)
(I
b
/ L
b
)
(1)
1.1. Braced Frames
Braced frames are frames in which the sidesway is effectively
prevented, and, therefore, the K-factor is never greater than
1.0. The sidesway inhibited alignment chart is the graphic
solution of the following mathematical equation:
G
A
G
B
4
( / K)
2
+
G
A
+ G
B
2
1
/ K
tan / K
+
2
tan / 2K
/ K
= 1 (2)
This equation is mathematically exact, in that certain
physical assumptions are exactly translated in mathematical
terms. Whether these assumptions can be reasonably ex-
tended to a specific structure is a matter for the designer to
decide.
For the transcendental Eq. 2, which can only be solved by
numerical methods, the French Rules propose the following
approximate solution:
K =
3G
A
G
B
+ 1.4(G
A
+ G
B
) + 0.64
3G
A
G
B
+ 2.0(G
A
+ G
B
) + 1.28
(3)
Slightly simpler equations apply to special cases. If the col-
umn is hinged at B, G
B
is infinitely large, and 1 / G
B
= 0:
K =
3G
A
+ 0.64
3G
A
+ 1.28
(4)
If, instead, the column is fully fixed at B, G
B
= 0:
K =
0.7G
A
+ 0.32
G
A
+ 0.64
(5)
Finally, in the not infrequent case where G
A
= G
B
= G:
K =
G + 0.4
G + 0.8
(6)
1.2. Sway Frames
If a rigid frame depends solely on frame action to resist lateral
forces, its sidesway is not prevented. In this case, the K-factor
is never smaller than 1.0. The mathematical equation for the
sway uninhibited case is:
G
A
G
B
( / K)
2
36
6(G
A
+ G
B
)
=
/ K
tan / K
(7)
Pierre Dumonteil is chief structural engineer, Robins Engi-
neers, Englewood, CO.
Simple Equations for Effective Length Factors
PIERRE DUMONTEIL
THIRD QUARTER / 1992 111
Although simpler than Eq. 2, this equation cannot be solved
in closed form either. The French Rules recommend the
following approximate solution:
K =
1.6G
A
G
B
+ 4.0(G
A
+ G
B
) + 7.5
G
A
+ G
B
+ 7.5
(8)
For a hinge at B, the formula simplifies to:
K = 1.6G
A
+ 4.0 (9)
For complete fixity at B, the approximation is:
K =
4.0G
A
+ 7.5
G
A
+ 7.5
(10)
When G
A
= G
B
= G:
K = 0.8G + 1.0 (11)
1.3. Accuracy of Equations
The accuracy that we can readily measure is of course the
mathematical accuracy, that is, the comparison of the results
given by an approximate formula to those obtained by solving
the corresponding exact equation. The accuracy of the
alignment charts depends essentially on the size of the charts,
and on the readers sharpness of vision. For the small charts
in the Column Section of the AISC Manuals, this accuracy
may be about five percent. In view of the many simplifying
assumptions needed to arrive at Eqs. 2 and 7, this accuracy is
certainly sufficient.
The formula proposed by the ACI for braced frames gives
K = 0.7 for a beam fully fixed at both ends, instead of 0.5. If
G
A
= G
B
= 3.0, it yields K = 1.0, instead of the expected 0.89.
The equations for unbraced frames are somewhat better: for
G
A
= G
B
= 2.0 for instance, they yield K = 1.56, instead of 1.61.
The French Rules indicate that Eq. 3 has an accuracy of
0.5 percent to +1.5 percent, while Eq. 8 is accurate within
two percent. Tables 1 and 2 report the accuracies found at a
few sample points. Again because of the nature of the sur-
rounding assumptions, Eqs. 3 and 8 may be considered
mathematically exact.
2. BACKGROUND
We have not been able to trace the origin of these equations,
although similar closed-form approximations are said to have
been published by Donnell.
In the European Recommendations, Eqs. 3 and 8 are given
in function of two factors
A
and
B
(rather than K
A
and K
B
as
in the French Rules). The definition of differs from that of
G, since, at each column end:
=
(I
b
/ L
b
)
(I
c
/ L
c
) + (I
b
/ L
b
)
(12)
Table 1.
Comparison of Eqs. 2 and 3Braced Frames
GA
GB
K exact
K approx
Error, %
0.10
0.40
0.603
0.61
0.9
0.25
0.25
0.611
0.62
1.3
0.10
0.90
0.648
0.65
0.4
0.25
0.75
0.680
0.67
0.8
0.50
0.50
0.686
0.69
0.9
0.10
1.90
0.683
0.72
0.4
0.25
1.75
0.716
0.76
0.7
0.50
1.50
0.751
0.78
0.6
GA
GB
K exact
K approx
Error, %
1.00
1.00
0.774
0.78
0.5
0.50
4.50
0.792
0.80
0.7
1.00
4.00
0.840
0.84
0.4
2.50
2.50
0.877
0.88
0.2
0.50
9.50
0.806
0.81
0.8
1.00
9.00
0.858
0.86
0.5
2.50
7.50
0.913
0.91
0.2
5.00
5.00
0.930
0.93
0.1
Table 2.
Comparison of Eqs. 7 and 8Unbraced Frames
GA
GB
K exact
K approx
Error, %
0.10
0.40
0.603
0.61
0.9
0.25
0.25
0.611
0.62
1.3
0.10
0.90
0.648
0.65
0.4
0.25
0.75
0.680
0.67
0.8
0.50
0.50
0.686
0.69
0.9
0.10
1.90
0.683
0.72
0.4
0.25
1.75
0.716
0.76
0.7
0.50
1.50
0.751
0.78
0.6
GA
GB
K exact
K approx
Error, %
1.00
1.00
0.774
0.78
0.5
0.50
4.50
0.792
0.80
0.7
1.00
4.00
0.840
0.84
0.4
2.50
2.50
0.877
0.88
0.2
0.50
9.50
0.806
0.81
0.8
1.00
9.00
0.858
0.86
0.5
2.50
7.50
0.913
0.91
0.2
5.00
5.00
0.930
0.93
0.1
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 112
The mathematical relation between G and is simple:
= 1 / (1 + G) (13)
Europeans tend to prefer to G because a hinge means
= 0 and fixity = 1. Obviously, the K-factor will be the same
if the same elements are introduced in G and .
Another approach is also described in the French Rules.
The two beams AA and BB of Fig. 1 model the rotational
restraints of column AB. These beams have the same moment
of inertia I as AB, and are hinged at their far ends A and B.
Their respective lengths are
A
L and
B
L, with
A
and
B
such
that the rotational flexibilities of AA and BB at A and B are
equal to the flexibilities f
A
and f
B
of the actual restraints.
Applying a unit moment to AA at A for instance, must give
a rotation
A
equal to f
A
:
A
=
A
L
3EI
= f
A
(14)
or
A
=
3EI
L
f
A
(15)
Full fixity, = 0, means a very short beam spring; a very long
beam, infinite, represents a perfect hinge.
2.1. Braced Frames and Trusses
The K-factor for braced frames and trusses is:
K =
B
+ 0.7(
A
+
B
) + 0.48
B
+
A
+
B
+ 0.96
(16)
The buckling mode is a sine curve, the half wave of which is
KL; one point of inflexion is at a distance a from A:
a
L
=
0.3
B
+ 0.12
B
+ 0.6
A
+
B
+ 0.48
(17)
The other point of inflexion is at a distance b, obviously equal
to L KL a. The buckled shape is therefore easy to
determine.
Consider a symmetrical frame, braced against sidesway. In
the buckled shape of Fig. 2, the bending moments in the upper
and lower beams are constant because of symmetry. To main-
tain that symmetry, applying unit moments at A and A causes
a rotation
A
:
A
=
L
b
2EI
b
(18)
so that
A
=
3
2
I
c
L
c
L
b
I
b
= 1.5G
A
(19)
For braced frames, the equivalent flexural springs are ob-
tained with
A,B
= 1.5G
A,B
. Equation 3 was derived by substi-
tuting these values in Eq. 16.
2.2. Sway Frames
For a frame free to sway, the effective length factor K is:
Fig. 1. Column with beam springs in the non-swaying mode.
Fig. 2. Symmetrical buckling of symmetrical frame
(non-swaying mode).
THIRD QUARTER / 1992 113
K =
3.2
A
B
+ 4
A
+ 4
B
+ 3.75
A
+
B
+ 3.75
(20)
If
B
>
A
, dimension a measured from point A sets the
position of the point of inflexion in Fig. 3:
a
L
=
1
4
B
2
A
+ 3.75
A
+
B
+ 3.75
(21)
If
A
>
B
, the point of inflexion is located by dimension b
measured from point B:
b
L
=
1
4
A
2
B
+ 3.75
A
+
B
+ 3.75
(22)
Note that the buckling mode has only one point of inflexion
within the length L, the other one being obviously at a distance
KL > L.
Referring to Fig. 4, which shows a symmetrical unbraced
frame in the sidesway mode, it is seen that, because of
symmetry, the beams present a point of inflexion at mid-span.
The restraint on the columns is that provided by each half
beam hinged at the axis of symmetry. Consequently, we find:
A
=
3EI
c
L
c
(L
b
/ 2)
3EI
b
= 0.5G
A
(23)
Equation 8 was derived by substituting
A,B
= 0.5G
A,B
in
Eq. 20. While one would normally use the G-ratios, there are
cases where the flexural spring model may be better, in truss
calculations
8
for instance.
3. VALIDITY OF ASSUMPTIONS
The derivation of either the exact or the approximate equa-
tions requires several assumptions that are never exactly
fullfilled, whether the frame is braced or not. Examine the
frames of Figs. 2 and 4: it is evident that the assumed sym-
metries seldom exist. With the flexural spring model, one
could move the points of inflexion along the beams to see how
sensitive the K-factor is to their positions, but how much to
move them can only be estimated. Fortunately, the K-factor
is not too sensitive to variations in G
A
and G
B
, and its sensi-
tivity is further dampened by the inelastic effect described by
Yura.
10
Nonetheless, estimating a K-factor is sometimes dif-
ficult, and it would certainly be desirable to do away with
K-factors and effective lengths altogether. There is a definite
trend in modern codes to do precisely that.
In the AISC LRFD Specification, the designer has two
options: either make a P calculation, or determine the
required flexural strength M
u
by means of Eq. H1-2. In the
later case, one must establish not one, but two K-factors. The
first one is calculated assuming that there is no lateral trans-
lation of the frame; always smaller than 1.0, it serves to
calculate factor B
1
. The other one produces B
2
which reflects
the effects of sidesway; it is always larger than 1.0. The latest
Canadian code
7
goes one step further: it eliminates K-factors
altogether for unbraced frames and calls for a P analysis
instead. Presumably, specifying K = 1.0 takes care of the
second-order effects (or P effects) within the beam-column
itself. Professor McGuire
9
expresses a fairly common point
Fig. 3. Column with beam springs in the sidesway mode.
Fig. 4. Antisymmetrical buckling of symmetrical frame
(sidesway mode).
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 114
of view when he states: Right now, second-order elastic
analysis programs that eliminate the need to calculate B
1
and
B
2
factorsare available. I wish more engineers would use
them.
However, Professor McGuire goes on to say: But there are
other places where effective lengths are still the best, or only,
practical expedient for routine design, though future research
may change this. Such seems to be the case whenever
inelastic effects are introduced in the analysis, as in Yuras
method.
10
For triangulated trusses
8
for instance, the ultimate
strength can be safely predicted in both elastic and inelastic
ranges, but only by making extensive use of the effective
length concept. In fact, there is nothing wrong with effective
lengths and K-factors whenever they are a convenient and
accurate tool: at the same time it eliminates K-factors for
unbraced frames, the Canadian code now explicitly allows
K-factors substantially smaller than 1.0 for trusses in specific
conditions. However undesirable they may seem, effective
lengths and K-factors will be with us for some time yet.
CONCLUSION
The equations giving the K-factor in the French Rules are
accurate enough for design purposes. Their simple closed
form make them well suited for computer use, in particular in
spreadsheets.
In some instances, the model with flexural beam springs
considered in the French Rules may provide a better physical
understanding, and lead to a better evaluation of the K-factor.
REFERENCES
1. American Institute of Steel Construction, Manual of Steel
ConstructionLoad and Resistance Factor Design, 1st
Ed., 1986.
2. American Institute of Steel Construction, Manual of Steel
ConstructionAllowable Stress Design, 9th Ed., 1989.
3. Barakat, M., and Chen, W. F., Practical Analysis of
Semi-Rigid Frames, AISC Engineering Journal, Vol. 27,
No. 2 (2nd Quarter 1990), pp. 5468.
4. American Concrete Institute, Building Code Require-
ments for Reinforced Concrete/Commentary, ACI 318R-
89, Paragraph R10.11.2.
5. Regles de calcul des constructions en acier CM66,
Eyrolles, Paris, 1975.
6. European Convention for Constructional Steelwork,
European Recommendations for Steel Construction,
1978.
7. National Standard of Canada CAN/CSA-S16.1-M89.
Limit States Design of Steel Structures, 1989.
8. Dumonteil, P., In-Plane Buckling of Trusses, Canadian
Journal of Civil Engineering, Vol. 16, 1989, pp. 504518.
9. McGuire, W., Computers and Steel Design, Modern
Steel Construction, Vol. 32, No. 7, pp. 3942, July 1992.
10. Yura, J. A., The Effective Length of Columns in Un-
braced Frames, AISC Engineering Journal, Vol. 8,
No. 2, pp. 3742.
THIRD QUARTER / 1992 115
INTRODUCTION
Although the incidence of floor vibration problems appears
to be on the rise,
1,2
the use of mechanical damping devices to
control vibrations is limited. In a recent survey of vibration
control methods, Murray
3
reports that passive-mechanical
damping methods, including viscous damping, visco-elastic
damping, and tuned-mass dampers, have often gone untried
outside the laboratory or have had marginal impact in actual
buildings. This is particularly unfortunate because mechani-
cal dampers can sometimes control floor vibrations more
cheaply than structural stiffening, and are often the only
viable means of vibration control in existing structures.
This paper details the successful implementation of a
tuned-mass damping system to reduce the steady-state vibra-
tions of the longspan, cantilevered, composite floor system at
the Terrace on the Park Building in New York City. The
experience with this implementation suggests that tuned mass
dampers (TMDs) can be successfully employed to control
steady-state vibration problems of other composite floor sys-
tems. The potential for general application of TMDs in com-
posite floor systems is discussed, and areas for further
research are suggested.
BACKGROUND
The Terrace on the Park Building was designed by The Port
Authority of New York and New Jersey as its exhibition
building for the 1964 Worlds Fair (Fig. 1). The building
features elliptical promenade and roughly-rectangular ball-
room levels, both suspended six floors above the ground on
four steel supercolumns. The columns support a cross-shaped
pattern of floor-girders and an elliptical ring girder, which in
turn support a radial set of cantilevered floorbeams (Fig. 2).
The floorbeams span between the floor and ring girders, and
cantilever from the ring girder to the face of the building
(Fig. 3). The ballroom sub-floor is a reinforced concrete
deck-formed slab, resting on top of and periodically welded
to the floor-beams.
At the close of the Fair, the Authority turned over the
building to the New York City Department of Parks and
Recreation, which leased it to a private caterer to generate
income for the city. The caterer partitioned the ballroom level
symmetrically into four dining/dancing halls at the corners of
the building, each served by an existing, central kitchen area.
Individual halls were arranged with dining tables near the
kitchen (and the center of the building); bandstands and dance
floors were located at the tip of the cantilevered floors (Figs.
2 and 3).
As soon as the buildings cantilevered main floors were
used as dining and dance halls, guests complained about the
structures vibrations. Preliminary vibration tests performed
during dance events showed that the floor accelerations and
displacements sometimes reached 0.07G* and 0.13 inches,
respectively. Observations of sloshing waves in cocktail
glasses and chandeliers that bounced to the beat of the band
gave credence to these measurements. Observations made
and complaints logged aside, the measured vibrationas
interpreted by the modified Reiher-Meister scale
4
or more
recent work by Allen
1
are generally recognized as unaccept-
able for dining/dance floors. Floor displacements of 0.13
inches are considered Strongly Perceptible, as measured on
the modified Reiher-Meister scale; Allens recommendations
Anthony C. Webster is assistant professor of architecture/
Director of Building Technologies, Columbia University, New
York, NY.
Rimas Vaicaitis, is professor of civil engineering, Columbia
University, New York, NY.
Application of Tuned Mass Dampers To Control
Vibrations of Composite Floor Systems
ANTHONY C. WEBSTER and RIMAS VAICAITIS
* A G is equal to the acceleration of a body in a vacuum due to the force of gravity.
One G = 32.2 ft/second.
2
Fig. 1. Terrace on the Park Buildinggeneral view.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 116
limit acceptable floor accelerations in combined dining/danc-
ing environments to about 0.03G.
Preliminary free vibration tests of the structure found the
first natural frequency of a typical quadrant of the ballroom
level floor (corresponding to one dining/dance hall) to be
about 2.3 Hz. This very low frequency is well below the
recommended levels for floors whose vibrations are control-
led by structural stiffness,
1,3
and corresponds closely to the
beat of many dances.
5
Besides the low frequency of the ballroom-level floors,
their vibrations were being exacerbated by the location of the
dance floors, which maximized the amount of vibrations that
dancers were causing (Figs. 3 and 5). Moving the location of
the dance floors toward the center of the building clearly
would reduce the structures vibrations. This remedy was
completely unacceptable to the caterer, who made the sensi-
ble point that, located between the kitchen and dining areas,
the dance floors would block movement between the two and
obstruct the exits.
In 1988, after studying various structural stiffening
schemes they could not afford to construct, the Parks Depart-
ment decided to explore solving the vibration problem with
mechanical damping devices. The tuned mass damper (TMD)
solution was developed by Weidlinger Associates and Profes-
sor Vaicaitis after we performed a detailed study of the
structures dynamic characteristics, the forcing function shak-
ing it, and an assessment of various nonstructural remedies.
DYNAMIC CHARACTERISTICS OF THE
STRUCTURE
First, we began analytical studies of the buildings floor
system to determine its dynamic characteristics. A prelimi-
nary calculation of the first resonant frequency of the longest
cantilevered floorbeams (shown on Fig. 3), was performed,
using an equation by Murray and Hendrick:
6
f = K[gEI
t
/ WL
3
]
1
2
, (Hz) (1)
where:
f = the frequency of vibration of the floor
K = a coefficient depending on ratio of overhang to back-
span [tabulated in Ref. 6]
g = 386.4 in/s
2
E = modulus of elasticity
I
t
= transformed moment of inertia
W = weight supported by tee beam
L = length of cantilever
Assuming composite action of the floorbeam and concrete
deck, Eq. 1 agreed with the earlier rough measurements taken
at the structure, which showed that the floors first natural
frequency of vibration was about 2.3 Hz. Although for most
of their length, the bottom flanges of the floorbeams are in
compression, the composite floorbeam assumption made
sense because the deck was significantly reinforced, its steel
underside was frequently welded to the floorbeams, and the
ratio of live load to dead load was very small, reducing the
tendency for the concrete to crack and act independent of the
floorbeams.
Next, a detailed, finite element model of a typical floor
quadrant (corresponding to one dining/dance hall) was cre-
ated, to determine the fundamental floor frequency more
accurately, compute the associated mode shape, and see if
higher floor frequencies and mode shapes were being excited.
The floorbeams were modeled with composite bending prop-
erties and the concrete deck was modeled with plate elements.
The mass included all the structural loads, nonstructural loads
such as windows, mullions, partitions, and hung ceilings, and
about 15 percent of the 100 psf, code-prescribed live load.
Free vibration analysis of this model showed that the
reinforced concrete deck and ring girder tied the floor to-
gether, making an entire quadrant of the ballroom level vi-
brate as a unit. The fundamental mode shape described a
continuously deformed floor, with maximum deflection at the
extreme cantilevered corner, and monotomically decreasing
in deformations toward the ring and floor girders. The first
frequency of the floor system was predicted at 2.22 Hz. The
second resonant floor frequency was found at 3.9 Hz.
While the structure was being examined analytically, we
also measured the natural frequencies of each floor quadrant
(corresponding to one dining/dance hall) of the actual struc-
ture, the mode-shape associated with the first natural fre-
Fig. 2. Ballroom (6th floor) plan.
Fig. 3. Section through ballroom floor
(Section 1 on Fig. 2).
THIRD QUARTER / 1992 117
quency, and the damping in the first mode. Using a variable
speed, largemass shaker, our prediction of the floors resonant
frequencies was confirmed. By simultaneously recording ac-
celerations at a number of locations along the floor, we also
confirmed the computer models prediction of the first mode
shape. Using the half power method,
7
the damping in the first
mode was determined. The measured frequencies and experi-
mentally obtained damping values for each floor quadrant are
given in Table 1. The floors were typically covered with
wood, and supported a lightweight steel-panel building-enve-
lope system from the bottom flanges of the floor-beams.
The most important empirical data was obtained during
actual dancing. Spectral transforms of the acceleration time-
histories obtained during dancing showed that each floor
quadrant was vibrating almost exclusively at its first mode
(Fig. 4). This result substantially simplified our later analyses
and helped us determine an appropriate damping method.
The peak root mean square (RMS) acceleration we meas-
ured at the extreme cantilevered corner of a dining/dance hall
was 0.06 G, recorded during a rock and roll dance. Assuming
the floor to be vibrating in its first mode, we used this
measured peak acceleration to determine the maximum floor
displacement at the same location. With the floor vibrating in
its first mode, both the displacement, y
2
(t), and acceleration,
y
..
2
(t), of the tip of the floor are essentially sinusoidal functions
in time. Their maximums are related by:
|y
2max
| = |y
..
2max
| /
2
(2)
where:
= the frequency of vibration of the floor, in radians per
second
|y
2max
| = the maximum tip displacement at this frequency
|y
..
2max
| = the measured RMS floor acceleration
This gave an estimated maximum floor displacement of
about 0.11 inches corresponding to the measured 0.06G peak
RMS acceleration.
ASSESSMENT OF MECHANICAL VIBRATION
CONTROL SYSTEMS
The decision to employ tuned mass dampers was influenced
by the functional layout and geometry of the structure; the
clients budget; the fact that the floors were being excited
primarily at their first resonant frequencies; the large ampli-
tudes of floor motion; and the light structural floor damping.
Simple Passive Dampers
Simple passive dampers, including viscous, friction, and
visco-elastic systems, rely on a damper mounted between a
vibrating structure and a stationary object to dissipate vibra-
tion energy as heat. As the two systems move relative to each
other, the simple passive damper is stretched and compressed,
reducing the vibrations of the structure by increasing its
effecting damping. At the Terrace, there was no non-moving
element nearby to attach a damper to, so these systems were
rejected.
Tuned Mass Dampers
Tuned mass dampers (TMDs) work by fastening a mass-block
to a structural component (such as a floor) via a spring
(Fig. 3). This system is set up so that, when the floor vibrates
at a resonant frequency (which could be caused by dancing,
for example), it induces analogous movement of the mass
Table 1.
Experimentally Determined Floor Frequencies and
Damping
Quadrant
(Dining/Dance Hall)
Fundamental
Frequency
(Hz)
Second
Frequency
(Hz)
Damping
% of Critical
Rose
Paradise
Crystal
Regency
2.23
2.31
2.27
2.46
3.75
3.75
2.8
3.0
3.0
3.6
Computer model 2.22 3.91
Fig. 4. Typical spectral response (floor excited by dancing).
Fig. 5. Floor deflection in first mode shape
(Section 1 in Fig. 2).
where:
F
f
(t) = idealized, periodic forcing function on dance floor
Y
t
= deflection of tip of floor in first mode
Y
f
= deflection of floor under forcing function
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 118
block and spring. By the conservation of energy, the TMD
motion in turn reduces the amplitude of the floors vibration.
A damping device (dashpot) is usually connected in parallel
with the spring between the mass-block and floor, increasing
the TMDs effectiveness over a range of frequencies and
taking a small amount of mechanical energy out of the system
as heat.
Because each TMD is tuned to a particular resonant
frequency, individual TMDs need to be installed for each
excited floor frequency. Because they rely only on floor
vibrations to operate, they do not need to be fastened to a
nearby stationary object. By the same token, TMDs are most
effective when located where the floors amplitudes are the
greatest.
TMDs were considered the only viable passive damping
system to employ at the Terrace because they did not require
fastening to a nearby stationary object. They were also par-
ticularly well suited to the Terrace because there was only one
floor frequency per ballroom to damp, reducing the required
number of TMDs, and the TMDs could be installed at loca-
tions where the floor amplitudes were largest (Fig. 5), maxi-
mizing their efficiency.
Active Mass Dampers
Active mass dampers, which are computer controlled and can
also be configured to work without relying on the relative
motion between the floor and a stationary object, were also
considered. These systems, currently the subject of much
research for controlling wind and earthquake induced vibra-
tions,
8
are a generally attractive solution to vibration prob-
lems because they are so effective. These systems were re-
jected for the Terrace on the basis of their high installation
cost, and their need for regular continuing maintenance,
which could not be ensured over the life of the structure.
DESIGN OF THE TUNED MASS DAMPERS
The TMD design process began by creating an equivalent-
displacement one-degree-of-freedom system, representing
the dynamic behavior of one point of a typical floor quadrant
when vibrating in its first mode. The one-mode model was
justified by the experimental data taken in each floor quad-
rant, which (as noted above) showed that the ballroom floors
were vibrating almost exclusively in their first mode. A TMD
was then added to this model, creating a two degree of
freedom system. The performance of this system, repre-
senting an actual floor quadrant and TMD, was used to
optimize each TMDs mass, spring stiffness, and damping.
Equivalent Displacement, One Degree of
Freedom Floor Model
Figure 5 shows, for a typical quadrant, the line of maximum
floor deflection in the first mode (cut at section 1 in Fig. 2).
This characteristic mode shape and its associated frequency
provided the basis for the equivalent, one degree of freedom
(1 DOF) floor-vibration model shown in Fig. 6. To calibrate
the 1 DOF system, we required that its free vibrations have
the same period as a typical floor quadrants, vibrating in its
first mode. This requirement is stated mathematically by:
(k
2
/ m
2
) =
f 1
(3)
where k
2
and m
2
are as defined in Fig. 6 and
f 1
is the first
resonant frequency of the floor, in radians per second
(rad/sec).
The calibration for mass and stiffness was completed by
dictating that the maximum dynamic displacement of the
1 DOF system would be the same as the tip of the floor
constrained to vibrate in its first mode shape, while being
forced by a periodic, concentrated load at its tip; i.e., y
2 max
(Fig. 6) = y
t max
(Fig. 5). Using the free-vibration computer
model, the 1 DOF systems mass, m
2
, was found by:
m
2
= u / d
t
2
, (kips sec
2
/in) (4)
where u is the mass-normalized generalized mass of the first
mode of the floor system, and d
t
is the associated modal
displacement at the tip of the floor. (This equation is derived
in Appendix A.)
As calculated by Eq. 4, m
2
is called the equivalent-dis-
placement generalized floor mass. Using this value for m
2
,
k
2
was found from Eq. 3.
We also computed k
2
and m
2
from our experimental data.
First, we assumed the floor would respond only in its first
mode when shaken by a harmonic forcing function of a
Fig. 6. 1 DOF floor model.
where:
m
2
= displacement normalized generalized mass of floor system
in first mode
k
2
= displacement normalized generalized stiffness of floor
system in first mode
c
2
= damping in first mode
F
2
(t) = idealized, periodic, dance-floor equivalent forcing
function
y
2
= y
t
= deflection of tip of floor in first mode
THIRD QUARTER / 1992 119
frequency equal to the floors first resonant frequency
[F(t) = F
o
sin(
f1
t), where
f1
is the first resonant frequency of
the floor quadrant (rad/sec) and t = time (sec)]. In this case,
the floor behaves as a one degree of freedom system, whose
steady-state response is given by :
y
2
(t) = F
o
sin(
f1
t + h) / (2k
2
) (Ref. 7) (5)
where:
F
o
= the amplitude of the forcing function driving the floor
at its cantilevered tip
y
2
= the peak floor response measured at the same location
f1
= the resonant frequency of the floor
h = a phase angle
k
2
= the equivalent displacement generalized stiffness of
the floor
= the measured damping of the floor, expressed as a
percent of the floors critical damping, c
c
*
from which:
|y
2max
| = F
o
/ (2k
2
), (in.) (8)
and:
k
2
= F
o
/ (2|y
2max
|), (kips/in.) (9)
and m
2
is then found from Eq. 3.
The damping included in the 1 DOF model () was 3.1
percent, corresponding to the average of the four experimen-
tally determined values given in Table 1. This is a bit lower
than what would be expected based on published values.
4,9
Using Eqs. 6 and 7, the absolute floor damping, c
2
, was found
to be 0.874 kip-seconds/in.
k
2
, c
2
and m
2
, computed both analytically and experimen-
tally, are given in Table 2. The computer generated values
were used in the subsequent analysis and design work.
The 1 DOF systems forcing function, F
2
(t), was also
calibrated to approximate the effect of dancing on the actual
structural floor. The function was assumed to be sinusoidal
(which is arguably a fair approximation for dancing
1
), i.e.:
F
2
(t) = F
o
sin(
__
t), (kips) (10)
The force amplitude (F
o
) was adjusted so that at frequencies
(
__
) close to the beat of previously measured dancing at the
Terrace, the maximum steady-state acceleration of the 1 DOF
model would match the RMS peak acceleration at the tip of
the actual floor during an instrumented dance event.
Two Degree of Freedom, Floor-TMD Model
After the equivalent-displacement 1 DOF system was devel-
oped, tuned mass dampers were added, creating a two degree
of freedom (2 DOF) system (Fig. 7). Using this system, the
TMD parameters of mass (m
1
), stiffness (k
1
), and damping
(c
1
), were optimized to reduce the dynamic displacement of
the floor (y
2
), due to the forcing function F
2
(t), representing
dancers on the real structural floor.
* For the 1 DOF floor model, and c
c
are related by:
= c
2
/ c
c
(Ref. 7) (6)
where
c
c
= 2 (k
2
/ m
2
) (kip*sec/in.) (7)
Table 2.
Stiffness and Mass of 1 DOF Floor Models
k2
(kips/in.)
m2
(kips)
c2
(kips*s/in.)
2
(% of Critical)
Equations 4, 3, 6
(Computer)
197 389 .874
(Determined from
choice of 2)
3.1%
(Chosen to match
experimental data)
Equations 12, 10
(Experimental)
205 406 .912
(Determined by 2)
3.1%
Fig. 7. 2 DOF floor-TMD model.
where:
m
1
= mass of TMD
k
1
= TMD spring stiffness
c
1
= TMD damping
y
1
= displacement of TMD
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 120
The TMDs needed to minimize the floors vibrations with-
out using so much mass that the existing floorbeams would
be overstressed. Although to a point TMDs become more
effective with increased mass,
10
calculations showed that the
floorbeams supporting the TMDs would be overstressed with
masses greater than about 20 kips located at tips. Therefore,
18 kips became our trial-optimal TMD mass. This corre-
sponds to a mass ratio (m
1
/ m
2
) of about 4.6 percent.
Because each actual ballroom floor was responding pri-
marily in its first mode shape, the TMDs needed to be oper-
ating near the associated resonant frequency to maximize the
amount of energy shifted from the vibrating floor to them-
selves. Various approaches to optimizing a TMDs natural
frequency have been reported.
11,12
As a start point, we used
the approach outlined by Reed,
12
in which the natural fre-
quency of the TMD attached to a fixed base is denoted
1
.
Then:
1
= (k
1
/ m
1
) , (rad/sec) (11)
where k
1
and m
1
are the spring-stiffness and mass, respec-
tively, of the TMD.
And Reeds optimum value for
1
is given by:
1,optimum
= 1 / [1 + (m
1
/ m
2
)], (rad/sec) (12)
where m
2
is the equivalent-displacement generalized floor
mass defined above.
With m
1
and m
2
, determined,
1optimum
was found by Eq. 12,
and k
1
was determined by Eq. 11. We also used Reeds method
for obtaining a trial value of optimum damping, c
1
:
c
1,optimum
= 2m
1
k
2
/ [1 + (m
1
/ m
2
)] , (kip sec/in.) (13)
The trial-optimum values, k
1
, c
1
, and m
1
, computed using
Eqs. 11 through 13, are summarized in Table 3.
Starting with the maximum safe mass and predicted-opti-
mum values for c
1
and k
1
, the 2 DOF model of the floor-TMD
system (Fig. 7) was analyzed. The systems equations of
motion are:
m
1
0
0
m
1
y
..
1
y
..
2
c
1
c
1
c
1
c
1
+c
2
y
.
1
y
.
2
k
1
k
1
k
1
k
1
+k
2
y
1
y
2
0
F
2
(t) = F
o
sin(
__
t)
kips (14)
Where
__
is the frequency of the forcing function (rad/sec).
These equations were used to: check the validity of the
TMD parameters given in Eqs. 12 and 13; predict the reduc-
tion in floor acceleration caused by the TMDs; and estimate
the maximum accelerations and relative displacements of the
TMD mass (m
1
). Because Eq. 14 cannot be solved modally
(due to the high damping in the system), they were integrated
numerically with the Runge-Kutta fourth order method.
13
For
values of
__
between 1 and 8 Hz, time histories were produced
and maximum values of y
2
, y
..
2
, and y
2
y
1
were recorded.
Because it was our experience that TMDs needed to be
adjusted in the field, we designed the actual TMDs to be
tuned for frequency and damping after installation. This
was done by varying the TMDs mass (m
1
) with 200 pound
steel plates, and adjusting its damping (c
1
) with variable
energy dissipation dashpots. Two types of variable energy
dissipation viscous dashpots were tested at the Carleton Lab
of Columbia Universitys Engineering School (Fig. 8), and
found to need a minimum stroke (in the form of enough
relative floor-TMD mass movement) of about 0.05 inches to
be effective. In practice, the relative motion between the
TMD and floor (y
2
y
1
in Fig. 7) is reduced with increasing
TMD mass (m
1
) and increased damping (c
1
). To obtain a
desired stroke, it was found by manipulating m
1
and c
1
in
Eq. 14 that the TMDs performed better if their damping was
slightly decreased than if their mass was reduced. Thus,
ensuring the stroke of the TMDs was large enough effectively
put an upper bound on their damping.
The TMD stiffness, k
1
, was limited by the properties of
commercially available springs. The spring stiffness, of
course, could not be modified in the field, which did not pose
much of a problem because the natural frequency of the
Table 3.
Summary of TMD Parameters*
Quantity
Trial Optimum
Value
Initial Construction
Value
Final Tuned
Value
Mass, m1 (kips) 18.0
(Controlled by 20 kip
floor beam capacity)
19.0 18.4
Damping, c1
(kips*s/in.)
0.19
Equation 13
0.19 0.15
Spring stiffness, k1
(kips/in.)
8.3
Equations 12, 11
8.8 8.8
(Cannot be field
adjusted)
* Values are presented for the Rose floor quadrant, whose measured natural frequency without TMDs installed was
2.23 Hz. Results for other quadrants are similar.
THIRD QUARTER / 1992 121
TMDs was controlled by adjusting their mass, as described
above.
The TMD parameters, m
1
, c
1
, and k
1
, which were used for
their initial construction, are given in Table 3. These values
were adjusted from the trial-optimum values as required by
the constraints on spring stiffness, damping, and mass noted
above. The corresponding predicted performance of the
TMDs is shown in Fig. 9. Each point on the graph represents
maximum steady state floor displacement corresponding to
the calibrated forcing function operating at frequency . The
curve predicted that the TMDs would reduce dance-induced
floor vibration by a maximum of 70 percent, corresponding
to dancing at about 2.2 Hz.
PERFORMANCE OF THE AS-BUILT SYSTEM
In 1991, one TMD was installed in the corner closet of each
dining/dance hall (Fig. 3). A typical system is shown in
Fig. 10. Each TMD was tuned for optimum frequency and
damping by using a variable-speed, large mass shaker to
excite the floor at a range of frequencies while monitoring
both floor and TMD accelerations. During an actual dance
event, floor accelerations were monitored first with the damp-
ers locked into place, then free to move. The final, tuned
TMD parameters are summarized for one floor quadrant in
Table 3. Results for other quadrants are similar. The results of
the shaker and dance-event tests are given in Figs. 11 and 12
respectively. Our measurements of TMD performance during
dance events showed that the TMDs reduced ballroom floor
vibrations by at least 60 percent. The difference between the
predicted 70 percent reduction and the 60 percent in-situ
performance is ascribed to the difference between the actual
and analytical forcing functions (dancers and a sine-wave,
respectively), and the floors vibrations in its second mode
shape, which the TMDs were not designed to reduce. No floor
vibration complaints have been reported to us since the TMDs
were installed.
The cost of constructing the four TMDs was $220,000. This
is less than 15 percent of the estimated construction cost of
structural stiffening (with new columns between the ballroom
floors and the ground) recommended for the Terrace in
1987.
14
SUMMARYCONCLUSIONS
The TMD implementation described in this paper demon-
strates their successful use in substantially reducing the vibra-
tions of an existing composite floor system. The critical
reasons for the success of the system are: its tunability, which
helped ensure that the theoretically predicted performance
could be approximated by the actual as-built system; and the
cost of the system, which was about an order of magnitude
less than the cost of recommended structural corrective
measures.
Although the methods used to analyze the case-study floor
system and design its TMDs are very general, and can be
applied in principle to many composite floor systems, the
effective use of TMDs in structures with higher damping
values and lower maximum floor displacements may prove
troublesome. It has been claimed that it is generally difficult
to make TMDs useful in structures with high natural damping.
The adjustable viscous dashpots used in this case-study per-
form marginally at small strokes, suggesting they would not
perform adequately in floors whose amplitudes are small.
However, other types of damping, which are field tunable and
Fig. 8. Viscous dashpot work per stroke at various energy
absorption settings.
(Kinechekand Cushioneerrefer to the manufacturers
proprietary names of tested models. The energy absorbed by the
dashpots per stroke is adjustable. Different presetcurves
correspond to different dashpot settings.)
Fig. 9. Maximum, steady-state floor amplitudes at tip of floor,
as predicted by Eq. 14. (TMD parameters correspond to
initial construction values in Table 3.)
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 122
may perform well at small amplitudes, have been used in
TMD applications,
15
and warrant further study. It should also
be noted that, although floor frequency itself should not
impact the viability of TMDs, most composite floors have
frequencies much higher than the fundamental floor fre-
quency at the Terrace. This may affect the choice of hardware
in other installations, including the types of springs and
dashpots used.
The success of the field-tuned case-study system presented
in this paper, and the small number of mechanical damping
systems installed in actual buildings today, suggest that damp-
ing systems are not being used as often as they possibly should
be. Increased use of passive damping systems requires that
structural engineers better understand their overall perform-
ance, and the limitations of their actual components (such as
dashpots). With this in mind, further research in the perform-
ance of passive damping devices in actual floor systems is
recommended in the following areas:
In-depth studies of TMD dashpots, including linear vis-
cous and Coulomb friction types.
Analysis of tuned-in-the-field TMD effectiveness in
floor systems with smaller dynamic displacements.
Analysis of tuned-in-the-field TMD effectiveness in re-
ducing transient vibrations.
Comparison of the effectiveness of TMDs and other
passive and active damping systems, in controlling both
transient and steady-state vibrations, in terms of both
performance and cost.
APPENDIX ADERIVATION OF EQ. 4
Applying free vibration analysis techniques to a finite ele-
ment model of the floor system, the following quantities can
be computed:
16
1
= the first resonant floor frequency
d
= the associated mode-shape column vector
M = the mass matrix of the floor system
K = the stiffness matrix of the floor system
u = the generalized mass of the first mode = d
T
Md
z = the generalized stiffness of the first mode = d
T
Kd
Leaving damping aside for simplicity, if the floor is moving
in only its first mode, forced by the function F(t), at a
particular node, n, then it can be shown
7,17
that the floor
movement at any point is described by the equations:
u
..
+ z = d
n
F
n
(t) (A1)
x
= d
(A2)
Fig. 10. TMD elevation.
Fig. 11. Peak RMS floor response at tip of floor,
subject to sinusoidal forcing function.
Test of actual floor system with field-tuned
TMD (Crystal Quadrant).
Fig. 12. Measured floor acceleration at tip of floor due to
dancing with field-tuned TMD.
THIRD QUARTER / 1992 123
Where is called the generalized coordinate of the first mode,
and x
is the vector of nodal coordinates from the finite element
formulation.
The equation of motion of the 1 DOF, equivalent displace-
ment model (Fig. 6) is:
m
2
y
2
+ k
2
y
2
= F(t) (A3)
By definition of the 1 DOF model, k
2
/ m
2
= z / u. By
specifying that y
2
= x
n
when F(t) = f
n
(t), these constraints lead
to:
y
2
= d
n
(A4)
uy
..
2
+ zy
2
= d
n
2
F
n
(t) = d
n
2
F(t) (A5)
Dividing this by d
n
2
, and comparing to Eq. A3 yields m
2
=
u / d
n
2
. Noting that, in the case of the Terrace, d
n
= d
t
, and
making this substitution yields Eq. 4.
REFERENCES
1. Allen, D. E., Building Vibrations from Human Activi-
ties, Concrete International: Design and Construction,
American Concrete Institute, 12:No.6 (1990) pp. 6673.
2. Ellingwood, B., Structural Serviceability: Floor Vibra-
tions, Journal of Structural Engineering, Vol. 110, No. 2,
February 1984.
3. Murray, T. M., Building Floor Vibrations, Engineering
Journal, 28:No. 3, Third Quarter, 1991, pp. 102109.
4. Murray, T., Design to Prevent Floor Vibrations, Engi-
neering Journal, Third Quarter, 1975, pp. 8387.
5. Commentary on the National Building Code of Canada,
Chapter 4, 1985.
6. Murray, T. and Hendrick, W., Floor Vibrations and Can-
tilevered Construction, Engineering Journal, Third
Quarter 1977, pp. 8591.
7. Meirovitch, L., Analytical Methods in Vibrations,
Macmillan, 1967.
8. Masri, S., ed., Proceedings of the US National Workshop
of Structural Control Research, October 1990, Depart-
ment of Civil Engineering, University of Southern Cali-
fornia, Los Angeles, CA.
9. Allen, D., and Rainer, J., Vibration Criterion for Long
Span Floors, Canadian Journal of Civil Engineering,
Vol. 3, No. 2, June, 1976, pp. 165173.
10. Candir, B. and Ozguven, H., Dynamic Vibration Absorb-
ers for Reducinq Amplitudes of Hysteretically Damped
Beams, pp. 16281635.
11. Jacquot, R., Optimal Dynamic Vibration Absorbers for
General Beam Systems, Journal of Sound and Vibration,
60(4), pp. 535542, 1978.
12. Reed, F. E., Dynamic Vibration Absorbers and Auxiliary
Mass Dampers, Shock and Vibration Handbook, Har-
ris, C., ed., 3rd ed., McGraw Hill, 1988.
13. Gerald, C., and Wheatley, P. Applied Numerical Analysis,
3rd ed., Addison-Wesley, 1984., pp. 311318.
14. Gandhi, K., Final Report: Study of the Structural Integrity
of the Terrace on the Park Building. Prepared for the City
of New York, Department of Parks and Recreation,
April 10, 1987.
15. Harmonizing with the Wind, Engineering News Re-
cord, October 25, 1984.
16. Gockel, M., ed., MSC/NASTRANHandbook for Dy-
namic Analysis, MacNeil-Schwendler Corporation, Los
Angeles, CA, 1983.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 124
Engineering
J ournal
AMERICAN INSTITUTE OF STEEL CONSTRUCTION, INC.
Page 125: Lewis B. Burgett
Fast Check for Block Shear
Page 132: Omer W. Blodgett
Structural Details To Increase Ductility of Connections
Page 137: Mario N. Scacco
Design Aid: Anchor Bolt Interaction of Shear and
Tension Loads
Page 141: Frank J . Hatfield
Design Chart for Vibration of Office and Residential
Floors
Page 145: W. A. Thornton
Strength and Serviceability of Hanger Connections
Page 150: Eric M. Lui
A Novel Approach for K Factor Determination
Page 160: W. McGuire
Computers and Steel Design
Page 170: 1992 Annual Index
4th Quarter 1992/ Volume 29, No. 4
Block shear is a fracture type failure in which fracture may
occur either along the shear plane or along the tension plane
(see Fig. 1). The first plane to reach its fracture strength will
not fail (separate) but is restrained by the stronger plane until
the fracture strength of the second is reached. Just before
fracture along the stronger plane the total strength will be the
sum of the fracture strength along the stronger plane plus the
yield strength of the weaker plane.
Tables are provided in the AISC LRFD Manual which give
values of C
1
and C
2
for two modes of failure. One mode is
tension fracture, shear yield. The other is shear fracture,
tension yield. The strength of the connection is given by the
equation
R
BS
t
w
(C
1
+ C
2
)
where t
w
is the thickness of the element being considered.
The method described in the LRFD Manual uses the larger
value of R
BS
calculated for each failure mode as the strength
of the connection. The value thus calculated does not always
agree with the phenomenon described in the first paragraph
above.
A convenient method is offered herein for accurately and
quickly determining which mode of failure to use. R
BS
is
determined for that mode by using the values of C
1
and C
2
in
the tables for that particular mode of failure.
This method is limited to the following conditions:
1. There is one row of bolts (same as for Manual tables).
2. Bolt spacing is three inches (same as for Manual tables).
3. Bolt hole dimensions are bolt diameter plus
1
16
-in. for
shear fracture and bolt diameter plus
1
8
-in. for tension
fracture.
4. Vertical edge distance, l
v
, is equal to or greater than 1.5
times the bolt diameter.
5. No less than two bolts are used.
These conditions are shown in Fig. 2.
Equations for fracture are:
Tension fracture (Eq. J5-2)
R
TF
F
u
A
nt
F
u
t
w
l
h
d
ht
2
_
,
Shear fracture (Eq. J4-1)
R
SF
F
u
A
ns
0.6F
u
t
w
N (3 d
hs
) +
d
hs
2
3 + l
v
1
1
]
where
= resistance factor, 0.75
F
u
= specified minimum tensile strength, ksi
t
w
= thickness of element (web), in.
l
h
= distance from center of hole to edge along tension
plane, in.
l
v
= distance from center of hole to edge along shear plane,
in.
d
ht
= diameter of hole (bolt diameter +
1
8
-in.)
d
hs
= diameter of hole (hole diameter +
1
16
-in.)
d = bolt diameter
N = number of bolts
Let l
v
= 1.5d (lower bound), set R
TF
= R
SF
and solve for l
h
.
l
h
2.375 0.4d
For this value of l
h
both planes have the same fracture
strength. Since this is a special value of l
h
it will be called l
h
*.
For a value of l
h
less than l
h
* it is obvious that shear fracture
will be the stronger fracture strength and the table in the
Manual for shear fracture, tension yield is used for selecting
values for C
1
and C
2
. If the number of bolts is increased shear
fracture strength will increase (shear area increases) and will
continue to be the failure mode to use. If l
h
exceeds l
h
* tension
fracture will be the stronger and the table for tension fracture,
shear yield is used for determining C
1
and C
2
.
For different bolt sizes and number of bolts the values of l
h
*
have been calculated and are tabulated below (Table A). If
l
h
is less than the value tabulated the shear fracture, tension
yield table should be used. For the designers convenience,
values of l
v
= 1.5d are included in the table.
An examination of Table A indicates that, for most beam
end connection situations, shear fracture, tension yield will
govern the strength of the connection. For instance, if three
or more bolts of 1
1
2
-in. or less in diameter are used shear
fracture will govern if l
h
is less than 3
3
8
-in. This is also the
governing case for two bolts if l
h
is less than 2
3
32
-in.
Example:
For the connection shown in Fig. 3, determine R using
Table A.
Lewis B. Burgett is Associate Director of Education, AISC,
Lilburn, GA.
Fast Check for Block Shear
LEWIS B. BURGETT
FOURTH QUARTER / 1992 125
l
v
3
1
2
2 1
1
2
> (1.5d 1
5
16
-in.)
l
h
= 1
1
4
< (l
h
* = 4
23
32
-in., for
7
8
-in. bolt)
Use shear fracture, tension yield table.
C
1
= 72.9 C
2
= 149
R
SF
t
w
(C
1
+ C
2
)
0.4(72.9 + 149) 88.76 kips
ALLOWABLE STRESS DESIGN (ASD)
The ninth edition of the ASD Manual does not have tables
similar to those in the LRFD Manual for checking block shear
Table A.
l
h
*
Bolt Size
N
5
8
3
4
7
8 1 1
1
8 1
1
4 1
3
8 1
1
2
2 2
1
8
2
3
16
2
1
4
2
5
16
2
3
8
2
1
4
2
1
2
2
9
16
3 3
1
2
3
1
2
3
15
32
3
15
32
3
15
32
3
1
4
3
7
16
3
13
32
4 4
29
32
4
13
16
4
23
32
4
5
8
4
17
32
4
9
32
4
3
8
4
9
32
5 6
9
32
6
1
8
5
31
32
5
25
32
5
5
8
5
9
32
5
5
16
5
5
32
l
v
1.5d
15
16
1
1
8
1
5
16
1
1
2
1
11
16
1
7
8
2
1
16
2
1
4
Figure 1
Figure 2 Figure 3
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 126
based on the assumption of fracture of one plane plus yielding
on the perpendicular plane. Since the ratio of shear fracture
strength to tension fracture strength is the same for ASD as it
is for LRFD, i.e.
(0.6F
u
A
ns
)
F
u
A
nt
0.3F
u
A
nw
0.5F
u
A
nt
0.6
A
ns
A
nt
_
,
Table A is applicable to ASD as well as LRFD.
Table B provides values of C
1
and C
2
for checking for block
shear when using ASD.
REFERENCES
Manual of Steel ConstructionLoad and Resistance Factor
Design, First Revised Edition, American Institute of Steel
Construction, Inc., Chicago, 1991.
Manual of Steel ConstructionAllowable Stress Design,
Ninth Edition, American Institute of Steel Construction, Inc.,
1989.
FOURTH QUARTER / 1992 127
Table B.
ASD
Shear Fracture, Tension Yield
F
y
= 36 F
u
= 58
C
1
l
v
l
h
1 1
1
8
1
1
4
1
3
8
1
1
2
1
5
8
1
3
4
1
7
8 2 2
1
4
2
1
2
2
3
4 3
1
1
4
43.4 46.1 48.8 51.5 54.2 56.9 59.6 62.3 65.0 70.4 75.8 81.2 86.6
1
3
8
45.5 48.2 50.9 53.6 56.3 59.0 61.7 64.4 67.1 72.5 77.9 83.3 88.7
1
1
2
47.7 50.4 53.1 55.8 58.5 61.2 63.9 66.6 69.3 74.7 80.1 85.5 90.9
1
5
8
49.9 52.6 55.3 58.0 60.7 63.4 66.1 68.8 71.5 76.9 82.3 87.7 93.1
1
3
4
52.1 54.8 57.5 60.2 62.9 65.6 68.3 71.0 73.7 79.1 84.5 89.9 95.3
1
7
8
54.2 56.9 59.6 62.3 65.0 67.7 70.4 73.1 75.8 81.2 86.6 92.0 97.4
2 56.4 59.1 61.8 64.5 67.2 69.9 72.6 75.3 78.0 83.4 88.8 94.2 99.6
2
1
4
60.8 63.5 66.2 68.9 71.6 74.3 77.0 79.7 82.4 87.8 93.2 98.6 104.0
2
1
2
65.1 67.8 70.5 73.2 75.9 78.6 81.3 84.0 86.7 92.1 97.5 103.0 108.0
2
3
4
69.5 72.2 74.9 77.6 80.3 83.0 85.7 88.4 91.1 96.5 102.0 107.0 113.0
3 73.8 76.5 79.2 81.9 84.6 87.3 90.0 92.7 95.4 101.0 106.0 112.0 117.0
C
2
RBS (C1 + C2)t
n
Bolt Diameter
3
4
7
8 1
2 32.6 29.4 26.1
3 71.8 66.3 60.9
4 111.0 103.0 95.7
5 150.0 140.0 131.0
6 189.0 177.0 165.0
7 228.0 214.0 200.0
8 268.0 251.0 235.0
9 307.0 288.0 270.0
10 346.0 325.0 305.0
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 128
Table B.
ASD
Tension Fracture, Shear Yield
F
y
= 36 F
u
= 58
C
1
l
v
l
h
1 1
1
8
1
1
4
1
3
8
1
1
2
1
5
8
1
3
4
1
7
8 2 2
1
4
2
1
2
2
3
4 3
1
1
4
47.0 50.6 54.2 57.9 61.5 65.1 68.7 72.4 76.0 83.2 90.5 97.7 105.0
1
3
8
48.8 52.4 56.0 59.7 63.3 66.9 70.6 74.2 77.8 85.0 92.3 99.6 107.0
1
1
2
50.6 54.2 57.8 61.5 65.1 68.7 72.3 76.0 79.6 86.8 94.1 101.0 109.0
1
5
8
52.4 56.0 59.6 63.3 66.9 70.5 74.1 77.8 81.4 88.6 95.9 103.0 110.0
1
3
4
54.2 57.8 61.4 65.1 68.7 72.3 75.9 79.6 83.2 90.4 97.7 105.0 112.0
1
7
8
56.0 59.6 63.2 66.9 70.5 74.1 77.7 81.4 85.0 92.2 99.5 107.0 114.0
2 57.8 61.4 65.0 68.7 72.3 75.9 79.5 83.2 86.8 94.0 101.0 109.0 116.0
2
1
4
61.4 65.0 68.6 72.3 75.9 79.5 83.1 86.8 90.4 97.6 105.0 112.0 119.0
2
1
2
65.0 68.6 72.2 75.9 79.5 83.1 86.7 90.4 94.0 101.0 108.0 116.0 123.0
2
3
4
68.6 72.2 75.8 79.5 83.1 86.7 90.3 94.0 97.6 105.0 112.0 119.0 127.0
3 72.2 75.8 79.4 83.1 86.7 90.3 93.9 97.6 101.0 108.0 116.0 123.0 130.0
C
2
RBS (C1 + C2)t
n
Bolt Diameter
3
4
7
8 1
2 32.3 30.5 28.7
3 75.6 73.7 71.9
4 119.0 117.0 115.0
5 162.0 160.0 158.0
6 205.0 203.0 202.0
7 248.0 247.0 245.0
8 292.0 290.0 288.0
9 335.0 333.0 331.0
10 378.0 376.0 374.0
FOURTH QUARTER / 1992 129
Table B.
ASD
Shear Fracture, Tension Yield
F
y
= 50 F
u
= 65
C
1
l
v
l
h
1 1
1
8
1
1
4
1
3
8
1
1
2
1
5
8
1
3
4
1
7
8 2 2
1
4
2
1
2
2
3
4 3
1
1
4
54.4 58.1 61.9 65.6 69.4 73.1 76.9 80.6 84.4 91.9 99.4 107.0 114.0
1
3
8
56.8 60.6 64.3 68.1 71.8 75.6 79.3 83.1 86.8 94.3 102.0 109.0 117.0
1
1
2
59.3 63.0 66.8 70.5 74.3 78.0 81.8 85.5 89.3 96.8 104.0 112.0 119.0
1
5
8
61.7 65.4 69.2 72.9 76.7 80.4 84.2 87.9 91.7 99.2 107.0 114.0 122.0
1
3
4
64.1 67.9 71.6 75.4 79.1 82.9 86.6 90.4 94.1 102.0 109.0 117.0 124.0
1
7
8
66.6 70.3 74.1 77.8 81.6 85.3 89.1 92.8 96.6 104.0 112.0 119.0 127.0
2 69.0 72.8 76.5 80.3 84.0 87.8 91.5 95.3 99.0 107.0 114.0 122.0 129.0
2
1
4
73.9 77.6 81.4 85.1 88.9 92.6 96.4 100.0 104.0 111.0 119.0 126.0 134.0
2
1
2
78.8 82.5 86.3 90.0 93.8 97.5 101.0 105.0 109.0 116.0 124.0 131.0 139.0
2
3
4
83.6 87.4 91.1 94.9 98.6 102.0 106.0 110.0 114.0 121.0 129.0 136.0 144.0
3 88.5 92.3 96.0 99.8 104.0 107.0 111.0 115.0 119.0 126.0 134.0 141.0 149.0
C
2
RBS (C1 + C2)t
n
Bolt Diameter
3
4
7
8 1
2 36.6 32.9 29.3
3 80.4 74.3 68.3
4 124.0 116.0 107.0
5 168.0 157.0 146.0
6 212.0 199.0 185.0
7 256.0 240.0 224.0
8 300.0 282.0 263.0
9 344.0 323.0 302.0
10 388.0 364.0 341.0
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 130
Table B.
ASD
Tension Fracture, Shear Yield
F
y
= 50 F
u
= 65
C
1
l
v
l
h
1 1
1
8
1
1
4
1
3
8
1
1
2
1
5
8
1
3
4
1
7
8 2 2
1
4
2
1
2
2
3
4 3
1
1
4
57.5 61.1 65.6 69.7 73.7 77.8 81.9 85.9 90.0 98.1 106.0 114.0 122.0
1
3
8
60.0 64.1 68.1 72.2 76.2 80.3 84.4 88.4 92.5 101.0 109.0 117.0 125.0
1
1
2
62.5 66.6 70.6 74.7 78.8 82.8 86.9 90.9 95.0 103.0 111.0 119.0 127.0
1
5
8
65.0 69.1 73.1 77.2 81.2 85.3 89.4 93.4 97.5 106.0 114.0 122.0 130.0
1
3
4
67.5 71.6 75.6 79.7 83.7 87.8 91.9 95.9 100.0 108.0 116.0 124.0 132.0
1
7
8
70.0 74.1 78.1 82.2 86.2 90.3 94.4 98.4 102.0 111.0 119.0 127.0 135.0
2 72.5 76.6 80.6 84.7 88.7 92.8 96.9 101.0 105.0 113.0 121.0 129.0 137.0
2
1
4
77.5 81.6 85.6 89.7 93.7 97.8 102.0 106.0 110.0 118.0 126.0 134.0 142.0
2
1
2
82.5 86.6 90.6 94.7 98.7 103.0 107.0 111.0 115.0 123.0 131.0 139.0 147.0
2
3
4
87.5 91.6 95.6 99.7 104.0 108.0 112.0 116.0 120.0 128.0 136.0 144.0 152.0
3 92.5 96.6 101.0 105 109.0 113.0 117.0 121.0 125.0 133.0 141.0 149.0 157.0
C
2
RBS (C1 + C2)t
n
Bolt Diameter
3
4
7
8 1
2 47.8 45.8 43.8
3 108.0 106.0 104.0
4 168.0 166.0 164.0
5 228.0 226.0 224.0
6 288.0 286.0 284.0
7 348.0 346.0 344.0
8 408.0 406.0 404.0
9 468.0 466.0 464.0
10 528.0 526.0 524.0
FOURTH QUARTER / 1992 131
Materials used in steel structures are increasingly becoming
thicker and heavier. A greater chance of cracking during
welding of beams to columns, for example, has resulted due
to increased thickness of material. With weld shrinkage re-
strained in the thickness, width, and length, triaxial stresses
develop that may inhibit the ability of steel to exhibit ductility.
This paper will try to explain why these cracks may occur and
what can be done to help prevent them by expanding on
information presented in the AISC Supplement No. 1 (LRFD)
or No. 2 (ASD).
We will first consider the pulling of a simple tensile speci-
men to find out what conditions cause this ductile behavior.
Then we will find out why this behavior goes from ductile to
brittle when triaxial tension is applied. Finally, we will see
what conditions under triaxial stresses the ductility can be
restored.
This information is then applied to the practical question
of how wide the weld access hole in the web of a connection
should be to avoid brittle behavior.
In Fig. 1a the member is unstressed and the atoms are
spaced the proper amount.
In Fig. 1b, a tensile stress is applied and the atoms move
apart elastically in the direction of the stress. If the stress is
removed, the atoms will move back into their proper positions
as in Fig. 1a.
In Fig. 1c a compressive stress is applied and the atoms
move together elastically in the direction of the stress. Again,
if the stress is removed, the atoms will move back into their
initial proper positions, as in Fig. 1a.
In both tension and compression, if the applied stress does
not exceed the yield strength
y
, the action is elastic and the
member will come back to the initial dimensions when the
stress is removed.
In both cases the energy stored in the stressed member is
elastic energy. Examples would be a wound-up clock, a
structural member when stressed, etc.
If, however, as in Fig. 1d, the member is subjected to a shear
stress that exceeds the critical value
cr
=
1
y
, then a perma-
nent sliding action occurs along a plane between atoms which
will not be recovered when the stress is removed.
This is plastic strain and results in energy being absorbed.
In Fig. 2a, the member is subjected to a tensile stress under
the yield strength
y
. As in Fig. 1b, this results in elastic strain
and is recoverable when the stress is removed. Notice also in
Fig. 2a that a shear stress occurs which has a maximum value
of =
1
2
on a plane at 45, with the axis of the applied tensile
stress. If the applied stress is increased to a value of
y
, the
Omer W. Blodgett is with The Lincoln Electric Company,
Cleveland, OH.
Structural Details To Increase
Ductility of Connections
OMER W. BLODGETT
Figure 1
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 132
resulting shear stress exceeds its critical value
cr
=
1
y
then
a permanent slip occurs on planes at 45 (Figs. 2c and d).
This is plastic strain and, if continued, will cause the
specimen to neck down (Fig. 2c). As the cross-sectional area
continues to become smaller, the tensile stress finally exceeds
the critical normal stress (tensile strength) and the member
fails.
All of this can be seen in the stress-strain curve of Fig. 3.
Region a below the yield strength covers the elastic strain
portion. Region c covers the plastic strain portion with the
member necking down. Point d is tensile failure.
In the stress-strain curve of Fig. 3, region a is all elastic
strain. The resulting shear stress is under the critical value
cr
=
1
y
so no plastic strain takes place.
In region c, the resulting shear stress exceeds the critical
value and plastic strain takes place with more and more
necking down.
The ductility of the simple tensile test specimen occurs
because there is a shear stress component from the particular
load condition and, more importantly, because it exceeds its
critical value by a considerable amount.
Let us see if we can find why this test specimen is ductile;
then we can check the ductility of other loaded members or
details.
The ductility of a simple tensile specimen occurs because
there are two shear stresses,
13
and
23
, resulting from the
applied tensile stress
3
. (See Fig. 4a.) Notice when the stress
3
reaches its critical value for failure (70 ksi in this example),
the two shear stresses have already exceeded their critical
value of 20 ksi. There are two shear stresses because there are
two circles: circle 1-3 and circle 2-3. The third circle, 1-2, has
no radius, hence no shear stress, since it is a point.
Any value of shear for
13
and
23
above the critical 20 ksi
will cause plastic strain.
Notice in Fig. 4b that both circle 1-3 and circle 2-3 cause
plastic strain
3(13)
and
3(23)
. Therefore, the total plastic strain
in the direction of the applied stress
3
will be:
3
=
3(13)
+
3(23)
Since
3(13)
=
3(23)
, we then have:
3
= 2
3(13)
which will tend to reduce the residual tensile stress.
If the specimen is pulled to failure,
3
will reach its critical
value, or tensile strength. (See Fig. 5.) By this time the two
shear stresses are above the critical value and plastic strain or
movement will take place. Notice that the total plastic strain
consists of two values:
3(13)
and
3(23)
. The movement
3
acts
in the direction of the stress
3
and would tend to reduce any
residual stress.
This member should behave in a ductile manner.
Plastic behavior takes place from
3
= 40 ksi up to 70 ksi
and is caused by two different plastic strains,
3(13)
and
3(23)
.
In this case of triaxial stresses, all are tensile (Fig. 6). If
Figure 2
Figure 3 Figure 4b
Figure 4a
FOURTH QUARTER / 1992 133
they have different values, there would be three different
circles: 1-2, 1-3, and 2-3. If stresses
1
and
2
are equal, circle
1-2 will have zero radius and will be represented by a point.
Notice in Mohrs circle of stress, if
3
reaches its critical value
cr
or ultimate tensile strength, the two shear stresses
13
and
23
do not reach their critical value and there will be no plastic
strain or ductile movement. (See also Fig. 7.)
This condition would result in rather brittle behavior.
For ductile behavior, there must be a shear stress compo-
nent, , resulting from the applied tensile (normal) stress, .
(See Fig. 8.)
These tensile stresses must differ considerably in value in
order to produce shear stresses of any reasonable value be-
cause the value of the shear stress is the radius of the circle
drawn through any two tensile stresses. (See Fig. 9.)
The greatest shear stress would occur if one of the normal
Figure 6
Figure 5
Figure 9
Figure 8
Figure 7
Figure 10
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 134
stresses is in compression in this example,
1
, while the other
is in tension,
3
. (See Fig. 10.)
In order to produce plastic strain (ductility) and be helpful,
the shear stress must exceed the critical stress
cr
=
1
y
. (See
Fig. 11.) Otherwise, only elastic strain results with no help
for ductile behavior.
No matter how large the resulting shear stress is, or how
much plastic strain is produced, it is of little or no value in
relieving the applied tensile stress
3
unless it acts in the
direction of
3
. Plastic strains
3(13)
and
3(23)
from circle 1-3
and circle 2-3 act in this direction and are helpful. Plastic
strain from circle 1-2 does not act in this direction and does
not help.
We are not talking about overall elongation of a specimen.
This is complex and consists of varying amounts of plastic
strain along the length of the necked-down specimen.
We have here a practical problem of predicting a crack next
to a weld access hole (a very limited region), so we are
interested in the plastic strain at this critical point to see if it
is sufficient to relieve tensile stress
3
and prevent a crack
from forming.
Figure 12 shows the beneficial effect of having at least one
stress in compression. When stress
3
reaches the critical
value
cr
for failure, shear stress
13
has been above its critical
value for some time, resulting in quite a bit of plastic strain
in the direction of the stress
3
. Although stress
12
is above
Table 1.
3
= =
116
6.8
1
Normal
Stress
2
Elastic
Strain
3
Total
Strain
4
Plastic
Strain
3
10
15
20
25
30
35
40
45
50
55
60
65
70
e
.00033
.00050
.00067
.00083
.00100
.00117
.00133
.00150
.00170
.00180
.00200
.00220
.00230
.00033
.00050
.00067
.00083
.00100
.00117
.00133
.00230
.00330
.00500
.00760
.01180
.01830
.0008
.0016
.0032
.0056
.0096
.0160
Figure 12
Figure 11
Figure 13
FOURTH QUARTER / 1992 135
the critical value, its plastic strain does not act in the direction
of stress
3
.
This condition should result in rather ductile behavior. Plastic
behavior occurs from 26 ksi up to 70 ksi. (See Fig. 13.)
It would be very helpful if this data on plastic strain could
be put into the form of a stress-strain curve for this critical
location.
Table 1 lists the data from a typical stress-strain curve for
structural steel (Fig. 14a). Total strain is listed in Column 3.
The elastic strain, calculated from / E, is listed in Col-
umn 2. By subtracting the elastic strain from the correspond-
ing total strain, we obtain the plastic strain (Column 4). This
plastic strain is shown in Fig. 14b.
Since the plastic strain in Column 4 and Fig. 14b is caused
by the corresponding shear stress which exceeds its critical
value
cr
, we would like to convert the tensile plastic stress
tensile-strain curve into a plastic stress shear-strain curve
(Fig. 14c). This can be done with Fig. 14b by taking one-half
of the tensile stress value, since
1
2
, and also one-half of
the plastic strain, since, in a simple tensile specimen, we
found
3
2
3(13)
. From this we get the curve of Fig. 14c.
For plastic strain in terms of tensile stress:
3
116
1
1
]
6.8
since
3
2
and
3
2, so
2
2
116
1
1
]
(See Table 2.)
This data will then be used for the case of (a) a narrow-weld
access hole in which the triaxial stresses are all tension; and
(b) a wide-weld access hole in which one of the triaxial
stresses is in compression to construct a stress-strain curve for
the critical region in the flange at the edge of the hole. This
shows the possible difference in ductile-to-brittle behavior of
the two details. A simple tensile test specimen is presented as
a reference.
REFERENCE
1. AISC Supplement No. 1 (LRFD) or No. 2 (ASD), Jan. 1.,
1989.
2. Blodgett, Omer W., Distortion, The James F. Lincoln Arc
Welding Foundation Bulletin, G261, Nov. 1984.
3. Gensamer, Maxwell, Strength of Metals Under Combined
Stresses, American Society of Metals, 1984, p. 10.
4. Bjorhovde, Brozzetti, Alpsten, and Tall, Residual Stresses
in Thick Welded Plates, AWS Welding Journal, Aug. 1972,
p. 397.
5. Estuar and Tall, Experimental Investigation of Welded
Built-Up Columns, AWS Welding Journal, April 1963,
p. 170.
6. Parker, Earl R., Brittle Behavior of Engineering Structures,
John Wiley and Sons, Inc., 1957, p. 19.
7. Gayles and Willis, Factors Affecting Residual Stresses in
Welds, AWS Welding Journal, Aug. 1940, p. 303.
8. Shanley, F. R., Strength of Materials, McGraw-Hill Book
Co., 1957, Chapter 11, Plastic Strain-Combined Load-
ing, pp. 178200.
Table 2.
3
64
_ _
, ,
6.8
Shear Stress Plastic Strain
13
20.0
22.5
25.0
27.5
30.0
32.5
35.0
3
.00036
.00080
.00160
.00310
.00570
.00970
.01610
Figure 14 Figure 15
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 136
A common practice among structural engineers involved in
industrial building design is to specify either ASTM A36
threaded rod bolts or A307 headed bolts for use as cast-in-
place anchors to carry combined shear and tension forces to
the foundation. It is also fairly common to specify ASTM
A325 or equivalent strength material for anchor bolts which
must carry higher forces than can be accommodated by
ordinary carbon steel bolts.
Several articles have been written in the past ten years
which have addressed the problem of anchor bolt design for
combined loadings. By consolidating and summarizing the
available data, the problem can be simplified for most situ-
ations encountered in normal practice.
A conservative design approach is warranted, as suggested
by Marsh and Burdette
1
since test data is limited and conse-
quences of bolt failures are quite unacceptable for steel struc-
tures which must carry expensive industrial equipment.
DESIGN AID DEVELOPMENT
Shipp and Haninger (1983)
2
proposed that interaction curves
based on working stress design (WSD) allowables be gener-
ated for combined shear/tension load cases. Since AISC
Allowable Stress Design (ASD) is familiar to most practicing
engineers and has been used in the past to define anchor bolt
strengths, the author felt that a design aid should be developed
utilizing ASD allowables. A straight-line relationship be-
tween shear and tension was used as recommended by Marsh
and Burdette
1
and also Shipp and Haninger.
2
This is conser-
vative when compared to the AISC
5
equations for bolt inter-
action as illustrated in Figs. 3 and 4.
The C-factor, a shear coefficient which accounts for the
effect of various types of shear failure planes was used in Ref.
2 and originally in ACI 349 Appendix B.
3
The C-Factor has
been defined in Ref. 2 as the inverse of the friction coefficient
() of ACI 349 Appendix B:
Therefore:
C = 1 / 0.9 = 1.11
steel plate embedded with top surface flush with concrete
surface
C = 1 / 0.7 = 1.43
steel plate against concrete or grout surface (plate exposed)
C = 1 / 0.55 = 1.82
steel plate on grout pad on top of concrete surface
The authors of Ref. 1 recommended a numerically equiva-
lent value () be used, which is unrelated to friction and
corresponds to ACI 349 Appendix B as follows:
= ACI 349 -factor (friction coeff.)
= 0.85 0.9 = 0.765
= 0.85 0.7 = 0.595
= 0.85 0.55 = 0.468
Mario N. Scacco is senior structural engineer with Bateman
Engineering, Inc. (BEI), Lakewood, CO.
Design Aid: Anchor Bolt Interaction
of Shear and Tension Loads
MARIO N. SCACCO
Fig. 1. Anchor bolt designcarbon steel bolts.
FOURTH QUARTER / 1992 137
The desired C-factor can be applied similarly to a load
factor in ultimate strength design and the required bolt size
read directly from Figs. 1 and 2.
Based on the yield strength of the material, the safety factor
for tension in A36 bolts is F
y
= 36 ksi / F
t
= 19.1 ksi = 1.89 in
ASD.
The safety factor for shear is F
y
= 36 ksi / F
v
= 9.9 ksi =
3.64 for A36 threaded rod. The safety factor proposed by
Shipp and Haninger
2
is approximately equal to F
y
= 36 ksi /
0.55 36 ksi = 1.82. If tensile stress area is used to calculate
allowable forces, the effective safety factor is increased
slightly to approximately 1.82 / 0.75 = 2.42 with 0.75 being
the approximate ratio of tensile stress area to gross (nominal)
area per AISC.
5
The tensile stress area was used in earlier versions of the
AISC Specification
6
and ACI Appendix B
3
to determine al-
lowable tension load. However, the AISC Ninth Edition
5
uses
the nominal gross area to compute allowable loads in A36
threaded rod and A307 headed bolts. Table 1 was therefore
produced from the Ninth Edition values for allowable shear
and tension to define the limits of the straight-line charts.
Fig. 2. Anchor bolt designhigh strength bolts.
Fig. 4. Comparison of straight-line interaction curve to
AISC equation for A325 bolts.
Fig. 3. Comparison of straight-line interaction curve to
AISC equation for A36/A307 bolts.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 138
USE OF THE DESIGN AID
In most practical building design work, anchor bolts are
grouped in either two-bolt or four-bolt (square or rectangular)
patterns.
These bolts are confined by pier reinforcement such as
vertical dowels and hoop ties which serve to transfer the
tensile stresses and distribute the shear forces from the bolts
to the concrete footing. Therefore, for most practical de-
signsif proper embedment length is provideda minimum
of 12d for A36 / A307 bolts or 17d for A325 bolts,
2,8
and the
bolts are fairly close in plan to the vertical reinforcement (e.g.,
within three-bolt diameters), the tensile force is transferred to
the vertical reinforcement and pullout is prevented.
A minimum edge distance is also practical, since it is
difficult to place dowels, ties, and bolts in a pier and maintain
ACI minimum cover requirements without an edge distance
of at least 5d or four inches minimum for smaller bolts (
3
4
-in.
diameter or less). Therefore, this requirement from Ref. 2 was
retained for good performance of the bolts against lateral
bursting failure.
Shear failure of the concrete is prevented by the hoop tie
reinforcement if the top tie is placed within about two to three
inches of the pier top and additional ties are closely spaced to
the top tie.
For the rare cases encountered in practice where unreinfor-
ced concrete is used or a mat of bars is below the anchor bolts,
the performance of the bolts is dependent solely on the
concrete in tension and the effective pullout area can be
calculated according to Ref. 3. The effect of shear against a
free edge can also be evaluated according to Ref. 3. The effect
of overlapping pullout cones can be evaluated using Ref. 4.
It is felt that use of the design charts presented in Figs. 1
and 2 will result in conservative designs for most of the
situations encountered in general building design work. Al-
though not a requirement, a minimum compressive strength
of 3,000 psi is generally assumed for the use of the charts.
ACKNOWLEDGMENTS
This paper was sponsored by Bateman Engineering, Inc.
(formerly BEI Engineers/Constructors, Inc.). The contents of
this paper reflect the views of the author and not necessarily
the official policies of BEI. Special thanks to Scott Guercio
of BEI for his invaluable help in creating the charts and tables
presented herein.
APPENDIX 1
COMPARISON OF DESIGN METHODS
Example:
Service loads:
T = 15 kips (ASTM A36 anchor bolts)
V = 4 kips (live + wind)
Per ACI 349-85 Appendix B; USD (Ultimate Strength)
Approach:
Maximum steel stresses:
Tension f
y
= 0.9 (36) = 32.4 ksi
or 0.8f
ut
= 0.8 (58) = 46.4 ksi
Shear f
y
= 0.85 (36) = 30.6 ksi
Factored loads:
T
u
= 0.75 1.7 15 = 19.13 kips
V
u
= 0.75 1.7 4 = 5.1 kips
Area required:
T
u
/ U
t
+ V
u
/ U
v
where
= 0.55 (grouted base)
= (19.13 / 32.4) + (5.1 / 0.55 30.6) = 0.893 in.
2
Use 1
1
4
-in. diameter A36 bolt
A
t
= 0.969 in.
2
Per Fig. 1: ASD Approach:
Enter chart with
C V / 1.33 = 1.85 4 / 1.33 = 5.56 kips
and T / 1.33 = 15.0 / 1.33 = 11.28 kips
Read 1
1
4
-in. diameter bolt required.
REFERENCES
1. Marsh, M. Lee and Edwin G. Burdette, Anchorage of
Steel Building Components to Concrete, AISC Engineer-
ing Journal, First Quarter, 1985.
2. Chipp, John G. and Edward R. Haninger, Design of
Headed Anchor Bolts, AISC Engineering Journal, Sec-
ond Quarter, 1983.
3. Appendix BSteel Embedments, ACI 349-85, Code
Requirements for Nuclear Safety Related Structures.
4. Marsh, M. Lee and Edwin G. Burdette, Multiple Bolt
Anchorages: Method for Determining the Effective Pro-
jected Area of Overlapping Stress Cones, AISC Engineer-
ing Journal, First Quarter, 1985.
5. AISC, Manual of Steel Construction, Ninth Edition, 1989.
6. AISC Manual of Steel Construction, Seventh Edition,
1970.
7. Cannon, R. W., D. A. Godfrey and F. L. Moreadith, Guide
to the Design of Anchor Bolts and Other Steel Embed-
ments, Concrete International, July 1981.
8. DeWolf, John T., Column Base Plates, AISC Design Guide
Series, No. 1, September 1991.
FOURTH QUARTER / 1992 139
Table 1.
ASD Allowable Loads per AISC
5
A) Tension, kips
Material
F
y
(ksi)
F
t
(ksi)
Area (based on nominal diameter) in.
2
0.196 .3068 .4418 .6013 .7854 .9940 1.227 1.485 1.767 2.405 3.142 3.976
Bolt diamter (in.)
1
2
5
8
3
4
7
8 1 1
1
8
1
1
4
1
3
8
1
1
2
1
3
4 2 2
1
4
A307 20.0 3.9 6.1 8.8 12.0 15.7 19.9 24.5 29.7 35.3 48.1 62.8 79.5
A36 36 19.1 3.8 5.9 8.4 11.5 15.0 19.0 23.4 28.4 33.7 45.9 60.0 75.9
A325* 92
81
44.0 8.6 13.5 19.4 26.5 34.6 43.7 54.0 65.3 77.7 105.8 138.2 174.9
B) Shear, kips
Material
F
y
(ksi)
F
v
(ksi)
Area (based on nominal diameter) in.
2
0.196 .3068 .4418 .6013 .7854 .9940 1.227 1.485 1.767 2.405 3.142 3.976
Bolt diamter (in.)
1
2
5
8
3
4
7
8 1 1
1
8
1
1
4
1
3
8
1
1
2
1
3
4 2 2
1
4
A307 10.0 2.0 3.1 4.4 6.0 7.9 9.9 12.3 14.8 17.7 24.1 31.4 39.8
A36 36 9.9 1.9 3.0 4.4 6.0 7.8 9.8 12.1 14.7 17.5 23.8 31.1 39.4
A325* 92
81
21.0 4.1 6.4 9.3 12.6 16.5 20.9 25.8 31.2 37.1 50.5 66.0 83.5
*A325 spec. includes bolt diameters from
1
2-in. to 1
1
2-in. for bolt diameter geater than 1
1
2-in., equivalent strength material is available.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 140
INTRODUCTION
Occupants of some buildings may observe that routine
activities cause floors to vibrate noticeably. This may be a
consequence of the high strength-to-weight ratio of the struc-
tural material and system, and is not necessarily indicative of
inadequate strength or excessive deflection. In addition to
assuring that a floor satisfies strength and static deflection
requirements, the designer should be concerned with vibra-
tion perceived by occupants. The chart presented as Fig. 1
facilitates estimating the level of acceptability of the expected
vibration of an office or residential floor. The chart imple-
ments two acceptance criteria
8,10
of many that have been
proposed. Those criteria were developed by determining oc-
cupants perceptions of vibrations caused by routine activities
and then correlating those perceptions to measured or pre-
dicted levels of vibration caused by heel-drop tests. Applica-
tion of the criteria embodied in Fig. 1 is limited to quiet but
tolerant environments such as offices and residences, and to
vibration caused by activities normally associated with those
occupancies. In particular, the criteria in the chart may be
unconservative for floors supporting precise work such as
surgery, and for excitation by vehicles, machinery, or rhyth-
mic activities such as dancing and aerobic exercise.
BACKGROUND
In 1931 Reiher and Meister
11
published a study on human
sensitivity to continuous vibration that included empirical
functions of amplitude and frequency that define thresholds
of various levels of perception. The perceptibility scale for
standing persons subjected to vertical vibration suggests a
methodology for rating floors.
People are less sensitive to vibration of short duration than
to continuous vibration. In order to develop acceptance crite-
ria for transient floor vibration, Lenzen
7
conducted laboratory
tests on concrete floors supported on steel joists and also
collected data on actual building floors. Based on results of
those tests, he modified the Reiher and Meister functions by
a factor of 10. However, Lenzen observed that his data
supported an alternative interpretation, namely that the floors
for which vibrations were barely or not at all perceptible had
damping exceeding five percent of critical, and that vibrations
were definitely perceptible in floors with damping less than
three percent of critical. He stated that The main factor
influencing the effect of vibrations on the human was the
damping.
Wiss and Parmelee
12
conducted experiments in which hu-
man subjects recorded their responses to the vibration of a
shaker on which they stood. The amplitude of vibration first
increased over several cycles, peaked, and then decreased
over several cycles, with total duration ranging from one-
third to five seconds. The rate of decrease in amplitude
simulated damping, and that parameter was included in the
rating formula that resulted from the study.
D. L. Allen
4
reviewed perceptibility scales for floor vibra-
tion and methodology for estimating vibrational response,
presented guidelines for estimating damping, and discussed
remedial modifications.
D. E. Allen and Rainer
3
developed acceptance criteria for
floor vibration based on peak acceleration, frequency, and
damping. The criteria were presented as a chart that is appli-
cable to offices, residences, and schoolrooms, and for either
Frank J. Hatfield is professor of civil and environmental engi-
neering at Michigan State University, East Lansing, MI.
Design Chart for Vibration of
Office and Residential Floors
FRANK J. HATFIELD
Fig. 1. Perceptibility of vibration, and required damping.
FOURTH QUARTER / 1992 141
continuous or transient vibration caused by walking and other
routine activities. The criteria for transient vibration were
developed by correlating subjective evaluations of perform-
ance to the measured vibrations caused by heel-drop tests. A
heel-drop is the dynamic load caused by a 170- to 190-pound
person free-falling about 2.5 inches and landing on both heels.
It is represented analytically as the instantaneous application
of a 600-pound force that linearly diminishes to zero in 0.05
seconds. Allen and Rainer noted that the strong dependence
of acceptability on damping shown by their own studies and
those of Lenzen
7
is not supported by the Wiss and Parmelee
12
experiments, which involved isolated transients. Allen and
Rainer concluded that The heel impact test, which produces
an isolated transient vibration, should therefore be viewed as
providing a correlation between certain dynamic floor prop-
erties and acceptability of walking vibrations, not as a direct
simulation of the problem.
Murray
10
presented details of a procedure for predicting
human response to vibration of a steel beam and concrete slab
floor. He gave subjective guidelines for estimating damping
and stated that if it exceeds eight to 10 percent of critical,
vibration will not be objectionable. For lower values of damp-
ing, he linked perceptibility of vibration to the estimated
response of the beams, girders, and floor system to a heel-
drop, using a chart representing the following four of the six
ranges from Lenzens
7
modification of Reiher and Meisters
scale.
11
A
o
f < 0.018 vibration is not perceptible (1)
0.018 A
o
f < 0.06 vibration is slightly perceptible
0.06 A
o
f < 0.18 vibration is distinctly perceptible
0.18 A
o
f vibration is strongly perceptible
Murray stated that in his experience steel beam-concrete
floor systems, with relatively open areas and damping be-
tween four and 10 percent, which plot above the upper one-
half of the distinctly perceptible range, will result in com-
plaints from the occupants and that those systems that plot in
the strongly perceptible range will be unacceptable to both
occupants and owners. In Eq. 1, f is the fundamental natural
frequency in cycles per second and A
o
is the deflection am-
plitude in inches caused by a heel-drop at mid-span. For the
small deflections associated with vibration, friction is suffi-
cient to develop composite action. Therefore, natural fre-
quency and deflection amplitude are computed from the
transformed composite moment of inertia in which the effec-
tive slab width is taken as the sum of the halves of the
distances to adjacent beams. A formula was given for com-
puting the number of beams that are effective in resisting the
heel-drop. It was suggested that the total weight used in
computing natural frequency should include 10 to 25 percent
of the design live load in addition to self-weight and other
dead load. The formulas for heel-drop deflection amplitude
and fundamental natural frequency are, respectively
A
o
=
0.60(DLF)
48
L
3
EI
t
N
eff
(2)
f = 1.57
g
WN
eff
EI
t
N
eff
L
3
(3)
where DLF is the dynamic load factor (from table
9
or for-
mula
10
), L is length of the beam, E is modulus of elasticity of
steel, I
t
is moment of inertia of the transformed cross section
of a beam with composite concrete flange, N
eff
is the number
of beams considered to be effective, g is the acceleration of
gravity, and W is the total weight supported by the beam. Units
are inches, kips, and seconds. The formulas apply also to
girders supporting the beams. The fundamental natural fre-
quency of a beam and girder floor system is computed from
an approximation also used by D. L. Allen
4
1
f
s
2
=
1
f
b
2
+
1
f
g
2
(4)
where f
b
and f
g
are the fundamental natural frequencies of a
beam and girder, respectively.
In a later work
8
Murray compared five scales for rating
perception of floor vibration, including his own
10
and those
based on the work of Wiss and Parmelee
12
and Allen and
Rainer.
3
He noted inconsistencies and demonstrated that the
performance of real floors could be predicted incorrectly by
all of the scales. Based on heel-drop tests of real floors and
on owners and occupants ratings of those floors, he devel-
oped the following criterion
If D > 35A
o
f + 2.5, the floor will be acceptable (5)
where D is damping in percent of critical.
The detailed procedure
9
for implementing the criterion
includes appropriate formulas and guidelines from an earlier
paper.
10
This rating scheme enables a designer to exploit the
damping effect of partitions, ceilings, and other attachments.
Acceptance criteria based on heel-drop tests have been corre-
lated only to levels of vibration and tolerance normally associ-
ated with offices and residences. For other situations a more
general approach is needed. The American National Standards
Institute promulgated a standard5 governing evaluation of the
measured vibration of a building according to an acceptability
threshold that may be adjusted for type of occupancy and for
duration and frequency of occurrence of the vibration.
Ellingwood and Tallin
6
explored the dynamic forces and
structural responses associated with walking. They also com-
piled a table of acceptance limits for acceleration of floors for
various types of occupancy and for both steady-state and
transient vibrations. In order to evaluate the acceptability of
a floor design, the designer must predict the amplitudes and
frequencies of dynamic floor loads associated with expected
uses of the building and then for each load estimate the
acceleration response of the floor and compare it to the
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 142
appropriate acceptance limit. Computation of the accelera-
tion response must include an amplification factor, which can
be as high as 20 for lightly damped floors if the frequency of
the load matches a natural frequency of the floor. Therefore
it is advisable that office and residential floors have funda-
mental natural frequencies exceeding four cycles per second,
which is about the upper limit for footfall frequency of a
running human.
Recently D. E. Allen
1,2
focused attention on building vibra-
tion caused by aerobic exercise, audience participation, and
dancing. He discussed dynamic loads, estimation of vibra-
tional response, acceptance limits, and remedial measures, as
well as presenting case studies.
DESIGN CHART
Figure 1 is a chart that implements two acceptability criteria
proposed by Murray.
8,10
The criteria, and therefore the chart,
are applicable for quiet but tolerant environments such as
offices and residences, and to vibration caused by routine
human activities normally associated with those occupancies.
The relationship of the three axes is expressed by Eq. 3.
Using Eqs. 2 and 3, the product of the deflection amplitude
caused by a heel-drop and the fundamental natural frequency
may be written
A
o
f =
0.386(DLF)
EI
t
N
eff
L
3
(WN
eff
)
(6)
Equation 6 was used to plot the perceptibility ranges de-
fined by Eq. 1 and damping criteria based on Eq. 5. The latter
curves end at a natural frequency of 10 because Murray
recommended that his criterion not be used if natural fre-
quency exceeds that value.
9
The chart is meant to be used in conjunction with Murrays
paper,
9
which provides complete instructions for computing
the necessary parameters, as well as guidelines for assessing
available damping. To use the chart, the designer first com-
putes the stiffness coordinate (EI
t
N
eff
/ L
3
) and the weight
coordinate (WN
eff
), then locates the corresponding point. Fun-
damental natural frequency (f) is read from the third axis. If
fundamental natural frequency does not exceed four cycles
per second, redesign is necessary to prevent resonant re-
sponse to walking or running. The position of the point within
a region bounded by the textured curves indicates the esti-
mated perceptibility of vibration for a lightly damped floor.
The position of the point relative to the solid lines indicates
the damping required to achieve acceptability. If the damping
provided by ceilings, partitions, and other attachments will be
less than the level required, the design should be modified.
EXAMPLES
Murray
9
investigated an example slab-beam-girder floor sys-
tem. The following parameters of a beam were given and
computed
9
L = 432 in.
W = 21.87 kip (including 20 percent live load)
I
t
= 1,765 in.
4
N
eff
= 1.93
Chart coordinates are
WN
eff
= (21.87)(1.93) = 42.2 kip
EI
t
N
eff
L
3
=
(29 10
3
)(1,765)(1.93)
432
3
= 1.23 kip/in.
Using those coordinates, the designer may read from Fig. 1
that the fundamental natural frequency of a beam is about
5.3 cps, that vibration due to routine activities will be
slightly perceptible if the beams are lightly damped, and
that the vibration will be acceptable for an office, residence,
or similar environment if damping of about four percent or
more is provided. According to Murrays guidelines,
9
that
damping requirement will be satisfied if the beams have
directly attached to them partitions, or at least a moderate
amount of ductwork and mechanical equipment, or a
sheetrock ceiling.
The girder may be analyzed similarly, and Fig. 1 indicates
a fundamental natural frequency of about 7.2 cps. The per-
ceptibility rating and damping requirement of the girder are
found to be essentially the same as those for the beam. The
results for the beam and the girder necessarily match those
given by Murray
9
since Fig. 1 is an exact implementation of
his methods.
The fundamental natural frequency of the beam and girder
system is approximated by Eq. 4
f
s
=
1
5.3
2
+
1
7.2
2
1
2
= 4.3 cps
The supported weight of the system is taken as that of a girder
WN
eff
= (45.39)(1) = 45.39 kip
Those two coordinates locate a point on the chart that is in the
slightly perceptible range and just below the four percent
damping requirement. Rather than approximating the weight
of the system, Murray
9
approximated the heel-drop response
amplitude. For this example the two approaches give similar
results but, in general, consistency is not guaranteed. Publish-
ed observations are insufficient to demonstrate that either
approach is correct.
CONCLUSION
Figure 1 is a chart that is useful for estimating the percepti-
bility of vibration of a steel beam and concrete slab floor being
designed for an office or residential building. It is hoped that
FOURTH QUARTER / 1992 143
a graphic representation will provide clearer insight into the
relative effectiveness of controlling vibration by increasing
stiffness, mass, or damping.
REFERENCES
1. Allen, D. E., Building Vibrations from Human Activi-
ties, Concrete International Design and Construction,
ACI, Vol. 12, No. 6, June 1990, pp. 6673.
2. Allen, D. E., Floor Vibrations from Aerobics, Canadian
Journal of Civil Engineering, National Research Council
of Canada, Vol. 17, No. 5, Oct. 1990, pp. 771779.
3. Allen, D. E., and Rainer, J. H., Vibration Criteria for
Long-span Floors, Canadian Journal of Civil Engineer-
ing, National Research Council of Canada, Vol. 3, No. 2,
June 1976, pp. 165173.
4. Allen, D. E., Vibrational Behavior of Long-span Floor
Slabs, Canadian Journal of Civil Engineering, National
Research Council of Canada, Vol. 1, No. 1, Sept. 1974,
pp. 108115.
5. Acoustical Society of America, Guide to the Evaluation
of Human Exposure to Vibration in Buildings, ASA 48-
1983, American National Standards Institute S3.29-1983.
6. Ellingwood, B., and Tallin, A., Structural Serviceability:
Floor Vibrations, Journal of Structural Engineering,
ASCE, Vol. 110, No. 2, Feb. 1984, pp. 401418.
7. Lenzen, K. H., Vibration of Steel Joist Concrete Slab
Floors, Engineering Journal, AISC, Vol. 3, No. 3, July
1966, pp. 133136.
8. Murray, T. M., Acceptability Criterion for Occupant-In-
duced Floor Vibrations, Engineering Journal, AISC,
Vol. 18, No. 2, 1981, pp. 6270.
9. Murray, T. M., Building Floor Vibrations, Engineering
Journal, AISC, Vol. 28, No. 3, 1991, pp. 102109.
10. Murray, T. M., Design to Prevent Floor Vibrations,
Engineering Journal, AISC, Vol. 12, No. 3, 1975, pp.
8287.
11. Reiher, H., and Meister, F. J., Sensitivity of Humans to
Vibration (German language), Forschung auf dem Ge-
beite des Ingenieurwesens, Vol. 2, No. 11, Nov. 1931,
p. 381.
12. Wiss, J. F., and Parmelee, R. A., Human Perception of
Transient Vibrations, Journal of the Structural Division,
ASCE, Vol. 100, No. ST4, April 1974, pp. 773787.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 144
INTRODUCTION
Hanger connections involve bolts in tension due to direct
loads and prying action and bending of tee flanges or angle
legs. It is the purpose of this paper to show that the analysis
method of the latest AISC Manuals, both ASD
1
and LRFD
2
versions, can with minor modification allow for a greatly
increased design strength and a more reliable prediction of
serviceability loads.
The strength of hanger connections is due mainly to the
strength of the bolts but is affected by the bending of the
hanger flanges which induces prying action in the bolts.
Previous emphasis on this problem has focused on the deter-
mination of the actual prying force Q rather than the overall
behavior of the connection itself. This paper concentrates on
assessing the strength of the connection, both ultimate
strength and yield (or separation) strength.
ANALYSIS OF STRENGTH AND SERVICEABILITY
The method for analysis and design of hanger connections
currently in use in both the current AISC ASD and LRFD
manuals is due to Struik and is presented in Kulak, et al.3 In
Ref. 3 the justification for this method is based on its capability
to predict the prying force Q with reasonable accuracy. The
prediction of Q is important for serviceability because it affects
the fatigue life of the connection. The prediction of Q is also
important for strength because it reduces the direct load that
the bolts can carry. However, for strength, it is most important
to know the ultimate load capacity of the hanger connection
and the prediction of Q is secondary to this. Thus, for strength,
the ultimate capacity calculated by any proposed method of
analysis should be compared to tests which give the ultimate
or breaking strength of the connection. For serviceability, the
analysis method should reasonably predict yield strength so
that with a factor of safety (or suitable load and resistance
factors) elastic behavior can be reasonably assured.
The following methods are proposedone for service-
ability (yield or separation strength) and the second for
strength (ultimate or breaking strength). These are both based
on Struiks method as presented in Ref. 3, but they are
formulated for efficient calculation and optimum results as
presented by Thornton.
4
For serviceability:
y
=
1
(1 + )
4B
y
b
pt
2
F
y
(1)
If
y
0, T
y
= B
y
(2)
If 0 <
y
1, T
y
=
pt
2
F
y
4b
(1 +
y
) (3)
(if
y
> 1, set
y
= 1)
For strength:
u
=
1
(1 + )
4B
u
b
pt
2
F
u
1
(4)
If
u
0, T
u
= B
u
(5)
If 0 <
u
1, T
u
=
pt
2
F
u
4b
(1 +
u
) (6)
(if
u
> 1, set
u
= 1)
In the above equations, the notation follows Ref. 1 except
as noted in the notation section of this paper.
To test these formulations, the test data produced by Douty
and McGuire
5
for T stubs are used. ure 1 shows the test
specimens and Table 1 gives the Douty and McGuire geomet-
ric and material data. Table 2 gives the results of applying the
above yield and ultimate strength formulation to the speci-
mens of . 1. Table 2 also gives the actual (experimental) yield
load, ultimate load, and actual failure mode. In Table 2, P
y
=
4T
y
and P
u
= 4T
u
, i.e., P
y
and P
u
are the assembly yield and
ultimate strengths which can be compared directly with the
actual (experimental) strengths. The parameter given by
Eq. 1 or Eq. 4, for yield (
y
) or ultimate strength (
u
)
respectively, gives an indication of the controlling limit state.
If < 0, the bolts control. If 0 1, the bolts and T flange
are both controlling. If > 1, the T flange controls. The
computed failure mode of Table 2 is based on these ranges
of
u
. Table 3 gives a direct comparison between actual and
theoretical results. It can be seen from Tables 2 and 3 that the
theory gives excellent agreement with the test results for
ultimate strength and generally very good results for yield
strength. Some observations on these results can be made.
Concerning the ultimate strength results, it is pointed out by
Kato and McGuire
6
that after the formation of the collapse
mechanism in the T flange (i.e., when the plastic bending
stress is F
u
at both the bolt line and the stem line) the T stub
W. A. Thornton is chief engineer, Cives Steel Company,
Roswell, GA.
Strength and Serviceability of Hanger Connections
W. A. THORNTON
FOURTH QUARTER / 1992 145
can sustain the load by hanging action. On the contrary, the
post yield strength of the high strength bolts is small and the
behavior is less ductile. Thus, in the tests, bolt fracture is
usually the failure mode even if the theory indicates that the
flange or web will fail first. Nevertheless, the significant
deformations of the flange that take place at the P
u
load do
cause additional load to be placed in the bolts, and this
additional load (conventionally called prying action) does
cause the bolts to fracture before their nominal ultimate
strength, i.e., 4B
u
, is achieved when the flange is flexible, i.e.,
u
> 0.
It will be observed from Tables 2 and 3 that the agreement
between experiment and theory for yield is not as good as that
for ultimate strength. This occurs because yielding is defined,
following Kato and McGuire, as the load at which the bolts
first see load in addition to the pretension load. This point
is also called the separation point. It is also the load at which
a collapse mechanism in the sense of simple plastic theory
forms in the T flange. In two instances in Table 2, Kato and
McGuire reported that the separation point was not clear
(Tests A11 and A15) and no yield load is given. In general,
because there is no clear catastrophic failure, the yield load
would be much more dependent on small variations in mate-
rial properties, thickness, initial pretension, and the like.
Therefore, it is reasonable to find a bigger variation between
theory and experiment here than in the ultimate strength
results. On the whole, it is felt that the agreement between
theory and experiment for the yield results is very good.
It should be noted that in the ultimate strength formulation
proposed above, the idea for using F
u
, the ultimate strength of
the T stub material, as the limiting bending stress in the T stub
flange, is due to Kato and McGuire.
6
The excellent agreement
shown in Table 3 for actual/theoretical ultimate strength
validates this idea.
RECOMMENDED DESIGN PROCEDURES
For connection design, the usual factor of safety for ultimate
strength and fracture is two in allowable stress design (ASD).
In load and resistance factor design, (LRFD) the same level
of safety is achieved with a resistance factor of .75 and an
expected average load factor of 1.5. Table 4 shows the theo-
retical ultimate strength P
u
t of Table 2 or Table 3 divided by
an effective factor of safety of two, and compares this to the
actual yield strength P
y
a reported by Refs. 5 and 6, also as
given and Tables 2 and 3. It can be seen from Table 4 that
P
u
t / 2 is generally within 20 percent of the actual yield load
P
y
a and is usually much closer than this. Therefore, designing
for P
u
d = P
u
t / 2 means that at working loads or factored
working loads, the connection will have distortions of the
same order of magnitude (i.e., 1
1
2
times larger) as elastic
distortions, which are vanishingly small for this configura-
tion. For instance, consider Example 31 of the AISC 9th
Edition Manual.
1
Considering the WT930 flange as a fixed-
fixed beam four inches long with a central transverse applied
load from the stem, the elastic displacement is 0.0024 in. and
the displacement caused by P
y
is one and one half times greater
at 0.0036 inch. If the gage is increased from 4 in. to 5
1
2
-in.,
the P
y
displacement is still only 0.0270 in., or less than
1
32
-in.
Thus, a suitable design method for strength is the ultimate
strength formulation of Eqs. 4, 5, and 6, with an effective
average factor of safety of two.
For serviceability, i.e., connections subject to fatigue or
where deformations must remain strictly elastic, it is recom-
mended that the yield strength formulation of Eqs. 1, 2, and
3, be utilized with the same effective factor of safety of two.
Table 3, as noted before, shows that P
y
a / P
y
t is reasonably
close to one, given the difficulties attendant to identifying
yield or separation. There is reasonably certainty that with a
factor of safety of two, Eqs. 13 will result in a connection
configuration which will remain essentially elastic at service
loads, because the elastic load P
e
t = P
y
t / 1.5 is greater than
the design load P
y
d = P
y
t / 2.
SUMMARY
The recommended serviceability design method is somewhat
more conservative than that now used in both the ASD and
LRFD AISC Manuals in that bolt yield strength rather than
bolt tensile strength is used, but the recommended method for
strength, which is justified by comparison to actual test data,
can result in much more economical connections because Fig. 1. Test specimens for Douty and McGuire tests.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 146
capacity is increased up to F
u
/ F
y
(61 percent for A36 steel)
when
u
> 1.
NOTATION
B
u
= Bolt tensile strength, ksi
B
y
= Bolt yield strength, ksi
F
u
= T-flange tensile strength, ksi
F
y
= T-flange yield strength, ksi
P
u = Test specimen ultimate strength (= 4T
u
), kips
P
y = Test specimen yield (separation) strength (= 4T
y
), kips
T
u
= External force at which T flange tributary to one bolt
attains ultimate strength state, kips
T
y
= External force at which T-flange tributary to one bolt
yields or separates, kips
Superscripts
a = actual (experimental)
d = design
t = theoretical
Subscripts
e = elastic
u = ultimate
y = yield or separation
REFERENCES
1. American Institute of Steel Construction, Manual of Steel
Construction, ASD, 9th. Edition, 1989, AISC, Chicago,
Illinois, U.S.A., pp. 4-89 through 4-95.
2. American Institute of Steel Construction, Manual of Steel
Table 1.
Douty and McGuire T-Stub TestsData (from Refs. 5 and 6)
Test
No.
T-Stub Base Bolt Dia. Geometric Parameters
Bolt Strength T-Stub Strength
Yield Ultimate Yield Ultimate
t
f
(in.)
t
w
(in.)
t
f
(in.)
t
w
(in.)
d
(in.)
a
(in.)
b
(in.)
a
(in.)
b
(in.)
B
y
(kips)
B
u
(kips)
F
y
(ksi)
F
u
(ksi)
A1
A3
A4
A5
A7
A8
A9
A10
A11
A12
A13
A14
A15
A16
B1
B3
B4
B5
B6
B7
B9
B10
B12
B13
0.751
1.680
2.000
0.751
1.680
2.500
0.751
1.102
1.680
2.000
0.751
1.102
1.680
2.500
0.751
1.102
1.102
1.102
1.680
1.680
1.680
1.680
2.500
2.500
0.438
0.945
1.000
0.438
0.945
1.000
0.438
0.625
0.945
1.000
0.438
0.625
0.945
1.000
0.438
0.625
0.625
0.625
0.945
0.945
0.945
0.945
1.000
1.000
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
1.128
1.128
2.093
3.033
1.128
2.093
1.128
2.093
1.128
2.093
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
Rigid
0.695
0.695
1.310
1.875
0.695
1.310
0.695
1.310
0.695
1.310
7
8
7
8
7
8
1
1
8
1
1
8
1
1
8
7
8
7
8
7
8
7
8
1
1
8
1
1
8
1
1
8
1
1
8
7
8
7
8
7
8
7
8
7
8
7
8
1
1
8
1
1
8
1
1
8
1
1
8
1.50
1.50
1.50
1.50
1.50
1.50
1.75
1.66
1.75
1.75
1.75
1.66
1.75
1.75
1.50
1.66
1.66
1.66
1.50*
1.50
1.50*
1.50
1.50*
1.50
2.43
1.78
1.75
2.03
1.78
1.75
2.03
1.94
1.78
1.75
2.03
1.94
1.78
1.75
2.03
1.94
1.94
1.94
2.40*
1.78
2.40*
1.78
2.40*
1.75
1.94
1.94
1.94
2.06
2.06
2.06
2.19
2.10
2.19
2.19
2.31
2.22
2.31
2.31
1.94
2.10
2.10
2.10
1.94*
1.94
2.06*
2.06
2.06*
2.06
1.59
1.34
1.31
1.47
1.22
1.19
1.59
1.50
1.34
1.31
1.47
1.38
1.22
1.19
1.59
1.50
1.50
1.50
1.96*
1.34
1.24*
1.22
1.84
1.14
0.82
0.69
0.68
0.71
0.59
0.58
0.73
0.72
0.61
0.60
0.64
0.62
0.53
0.51
0.82
0.72
0.72
0.72
1.01*
0.69
0.89*
0.59
0.89*
0.58
37.40
37.40
37.40
58.75
58.75
58.75
37.40
37.40
37.40
37.40
58.75
58.75
58.75
58.70
37.40
37.40
37.40
37.40
37.40
37.40
58.75
58.75
58.75
58.75
56.0
62.0
59.0
102.0
102.0
105.7
56.0
61.0
61.7
59.7
101.0
97.0
100.0
106.0
64.0
62.0
60.0
60.0
60.0
55.5
97.0
99.0
100.0
99.4
34.5
26.0
31.1
33.3
27.0
31.0
34.5
31.1
26.0
31.1
33.3
29.5
27.0
31.0
34.5
31.1
31.1
31.1
33.0*
26.0
33.0*
27.0
33.0*
31.0
6075
6075
6075
6075
6075
6075
6075
6075
6075
6075
6075
6075
6075
6075
6075
6075
6075
6075
6075
6075
6075
6075
6075
6075
* Indicates data based on non-rigid base.
FOURTH QUARTER / 1992 147
Construction, LRFD, 1st Edition, 1986, AISC, Chicago,
Illinois, U.S.A., pp. 5-119 through 5-125.
3. Kulak, Geoffrey L., Fisher, John W., and Struik, John H.
A., Guide to Design Criteria of Bolted and Riveted Joints,
Second Edition, Wiley-Interscience, 1987, Chapter 15, pp.
277288.
4. Thornton, W. A., Prying ActionA General Treatment,
Engineering Journal, AISC, Second Quarter 1985, Vol. 22,
No. 2, pp. 6775.
5. Douty, R. T. and McGuire, W., High Strength Bolted
Moment Connections, Journal of the Structural Division,
ASCE, Vol. 91, No. ST2, April 1965, pp. 101128.
6. Kato, B. and McGuire, W., Analysis of T-Stub Flange to
Column Connections, Journal of the Structural Division,
ASCE, Vol. 99, No. ST5, May 1973, pp.865888.
Table 2.
Douty and McGuire T-Stub TestsTheoretical and Actual Results (from Refs. 5 and 6)
Test
No.
Computed Strength (Theoretical)
Actual Strength
(Experimental)
Computed
Failure
Mode
Actual
Failure
Mode
Bolts and Flange Web
Yield Ultimate Yield Ultimate Yield Ultimate
y
T
y
(kips)
P
y
(kips)
u
T
u
(kips)
P
u
(kips)
P
y
(kips)
P
u
(kips)
P
y
(kips)
P
u
(kips)
A1
A3
A4
A5
A7
A8
A9
A10
A11
A12
A13
A14
A15
A16
B1
B3
B4
B5
B6
B7
B9
B10
B12
B13
1.32
.27
.48
2.70
.10
.58
1.39
.30
.28
.50
2.82
.97
.01
.61
1.32
.51*
.29
.29
.51*
.27
1.35*
.10
1.35*
.58
23.10
37.40
37.40
23.40
58.75
58.75
23.10
32.90
37.40
37.40
23.40
46.80
58.75
58.75
23.10
29.00*
32.90
32.90
28.70*
37.40
39.00*
58.75
39.00*
58.75
92.5
150.0
150.0
93.4
235.0
235.0
92.5
132.0
150.0
150.0
93.4
187.0
235.0
235.0
92.5
116.0*
132.0
132.0
115.0*
150.0
156.0*
235.0
156.0*
235.0
1.04, .69
.47, .48
.53, .58
2.57, 1.89
.27, .39
.60, .66
1.09, .73
.14, .04
.43, .50
.56, .60
2.65, 1.95
.62, .33
.27, .42
.63, .69
1.29, .89
.15, .03
.12, .05
.12, .05
.05*,.16*
.44, .59
.25*, .07*
.29, .40
.28*, .09*
.62, .67
40.243.5
62.0
59.0
52.665.8
102.0
105.7
40.244.3
57.161.0
67.1
59.7
52.665.8
81.486.7
100.0
106.0
40.247.9
57.662.0
56.560.0
56.560.0
60.0
55.5
84.4*92.5*
99.0
86.2*94.0*
99.4
161174
248
236
168210
408
423
161177
228244
247
239
168210
325345
400
424
161192
231248
226240
226240
240
222
338*370*
396
345*376*
398
128
209
264
124
217
263
128
165
209
264
124
157
217
263
128
165
165
165
1
209
1
209
1
219
1
217
2
264
2
264
273279
482602
510638
223279
482602
510638
223279
319398
482602
510638
223279
319398
482602
510638
223279
319398
319398
319398
482602
482602
482602
482602
510638
510638
88
136
140
108
180
240
96
112
5
140
108
140
5
240
100
6
93
6
96
120
100
140
220
160
216
176
256
219
224
392
>404>
177
240
256
245
228
3
286
3
404
>404>
202
230
228
230
254
233
348
403
378
>404>
Flange, Bolts
Bolts
Bolts
Flange
Bolts
Bolts
Flange, Bolts
Bolts, Flange
Bolts
Bolts
Flange
Flange, Bolts, Web
Bolts
Bolts
Flange, Bolts
Bolts, Flange
Bolts, Flange
Bolts, Flange
Bolts
Bolts
Bolts, Flange
Bolts
Bolts, Flange
Bolts
Bolt Fracture
Bolt Fracture
Nut Stripping
Flange
Bolt Fracture
Did Not Fail
4
Bolt Fracture
Bolt Fracture
Bolt Fracture
Bolt Fracture
Web
Web
3
Bolt Fracture
Did Not Fail
4
Bolt Fracture
Bolt Fracture
Bolt Fracture
Bolt Fracture
Bolt Fracture
Bolt Fracture
Bolt Fracture
Bolt Fracture
Bolt Fracture
Did Not Fail
1. Based on Fy= 26.0 in T stub.
2. Based on Fy= 31.0 in T stub.
3. Imperfection in material.
4. Exceeded machine capacity of 404 kips.
5. No abrupt increase bolt tension. Separation point (yield point) is not clear.
6. Estimated from . 7 of Ref. 5.
* Indicates data based on non-rigid base.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 148
Table 3.
Comparison of Actual and Theoretical Results
Test
No.
Yield Strength Ultimate Strength
Actual P
y
a
(kips)
Theoretical P
y
t
(kips)
Actual/Theoretical
P
y
a / P
y
t
Actual P
u
a
(kips)
Theoretical P
u
t
(kips)
Actual/Theoretical
P
u
a / P
u
t
A1
A3
A4
A5
A7
A8
A9
A10
A11
A12
A13
A14
A15
A16
B1
B3
B4
B5
B6
B7
B9
B10
B12
B13
88
136
140
108
180
240
96
112
140
108
140
240
100
93
96
120
100
140
220
160
216
92.5
150.0
150.0
93.4
217.0
235.0
92.5
132.0
150.0
150.0
93.4
157.0
217.0
235.0
92.5
116.0
132.0
132.0
115.0
150.0
156.0
217.0
156.0
235.0
.95
.91
.93
1.16
.83
1.02
1.04
.85
.93
1.16
.89
1.02
1.08
.80
.73
.91
.87
.90
1.01
1.03
.92
176
256
219
224
392
>404>
177
240
256
245
228
286
404
>404>
202
230
228
230
254
233
348
403
378
>404>
168
248
236
189
408
423
169
236
247
239
189
335
400
424
177
240
233
233
240
222
354
396
361
398
1.05
1.03
.93
1.19
.96
1.05
1.02
1.04
1.03
1.21
.80
1.01
1.14
.96
.98
.99
1.06
1.05
.98
1.02
1.05
Table 4.
Comparison of Ultimate Strength Design Values with
Actual Yield Strength Values
Test No.
P
u
d
= =
P
u
t
2
(kips)
P
y
a
(kips)
P
y
a
P
u
d
A1
A3
A4
A5
A7
A8
A9
A10
A11
A12
A13
A14
A15
A16
B1
B3
B4
B5
B6
B7
B9
B10
B12
B13
84.0
124.0
118.0
94.5
204.0
212.0
84.5
118.0
124.0
120.0
94.5
168.0
200.0
212.0
88.5
120.0
117.0
117.0
120.0
111.0
177.0
198.0
181.0
199.0
88
136
140
108
180
240
96
112
140
108
140
240
100
93
96
120
100
140
220
160
216
1.05
1.10
1.19
1.14
.88
1.13
1.14
.95
1.17
1.14
.83
1.13
1.13
.78
.82
1.03
.83
.79
1.11
.88
1.08
FOURTH QUARTER / 1992 149
INTRODUCTION
Current specifications
1,2
for the design of steel members and
frames in the U.S. make extensive use of the effective length
factor, K. The effective length factor is employed in the
member interaction equations to facilitate the design of
framed members by transforming an end-restrained compres-
sive member to an equivalent pinned-ended member. In frame
design, the effective length factor can also be regarded as a
parameter which emanates the stability interaction effect
among various members of the frame. At present, the effective
length factor K for a framed member under compression is
determined from a pair of alignment charts. Although the
charts provide an easy and a convenient means for designers
to evaluate the K factor, the models used in the development
of these charts embody a number of assumptions which are
not readily realized in actual situations. As a result, the K
factor so obtained is often inaccurate. For instance, one as-
sumption used is that all columns of a story reach a state of
instability simultaneously. Mathematically, this requires that
the quantity L P / EI (where L is the length, P is the axial
force and EI is the flexural rigidity of the member) be equal
for all columns of the story. If the alignment charts are
employed to evaluate K factors for columns wherein the term
L P / EI varies across the story, significant errors may result.
Commonly encountered situations in which the quantity
L P / EI varies include frames with unequal distribution of
column axial loads in a story, frames for which the moment
of inertia of the columns vary across a story, and frames with
leaner columns.
Over the years, various papers
311
which address the inade-
quacies of the alignment charts for determining the effective
length factors for framed columns have been published.
Modifications to rectify certain deficiencies in the chart solu-
tions were also reported. Nevertheless, all these approaches
entail a procedure which continue to make use of the align-
ment charts for solutions. In some cases, special charts are
also required to obtain solutions. In this paper, a simple and
straightforward approach for determining the effective length
factors for framed compression members which does not rely
on the use of the alignment charts nor the use of any special
charts is presented. The validity of the proposed approach will
be demonstrated for frames with different geometries and
loading conditions.
THE K FACTOR
There are various approaches by which the effective length
factor K can be determined. An eigenvalue analysis is perhaps
the most accurate method to evaluate this K factor. For a frame
subjected to a series of compressive forces
1
P,
2
p, ,
n
P
acting on columns 1 to n, respectively, a stiffness equation of
the form
[S
I
+ S
G
] {u} 0 (1)
can be written, where S
I
is the first-order structure stiffness
matrix, S
G
is the geometrical structure stiffness matrix and u
is the structure displacement vector. In a linear eigenvalue
analysis, S
G
can be expressed as S where is the eigen-
value of the problem linear in P. Thus, Eq. 1 can be written
in the form
[S
I
S] {u} 0 (2)
from which can be solved from the equation
det |S
I
S| 0 (3)
Once is solved, the axial force in each individual column, P
i
,
can be calculated and the effective length factor for that
column can be evaluated from the equation
K
i
2
EI
i
P
i
L
i
2
(4)
where K
i
is the effective length factor of column i; P
i
, I
i
, L
i
are the axial (compression) force at buckling (i.e., the critical
load), the moment of inertia and length of column i, respec-
tively, and E is the modulus of elasticity. Equation 4 is
applicable for isolated columns as well as for framed columns
in multistory multibay frames. If P
i
equals zero, K
i
is indefi-
nite. This is because the effective length factor is defined only
for members with finite compressive forces. Members which
are subjected to negligible axial forces should be designed as
beams which do not require the use of the K factors.
In evaluating the effective length factors for framed col-
umns, it is important for a designer to account for the inter-
action effect that exists among the various members of the
frame. It is a well-known fact that a strong column braces
a weak column at buckling. The result is that the K factor
Eric M. Lui is associate professor, Department of Civil and
Environmental Engineering, Syracuse University, Syracuse,
NY.
A Novel Approach for K Factor Determination
ERIC M. LUI
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 150
of the stronger column increases and the K factor of the
weaker column decreases as the difference in stiffness of the
two columns increases. This phenomenon is illustrated nu-
merically in Fig. 1 and Tables 1, 2 and 3.
Each of the three frames (Frames A, B, and C) in Fig. 1
consists of a strong column and a weak column. For
Frame A, the strong column is the one with the higher
moment of inertia (i.e., I with > 1). The theoretical K
factors of the two columns for different values of evaluated
using an eigenvalue analysis are shown in Table 1. When
= 1, the two columns are identical and so their K factors are
the same and are equal to 2. As increases, the right column
becomes stronger compared to the left column. The result is
that the K factor of the stronger column increases while the
K factor of the weaker column decreases. It is worthwhile to
note that the effective length factor for the weaker column can
have value less than unity even though the frame is buckled
in a sway mode. In the context of design, it is possible to
design the weaker column using K < 1 provided that a larger
value of K is used for the design of the stronger column.
For Frame B, the weak column is the one which is
subjected to a higher axial compressive load (i.e., P with
> 1). When = 1, both columns are subjected to the same
loadings and so K = 2 for both columns. However, as
increases, the left column is carrying a higher axial load and
becomes the weak column. When buckling occurs, the right
column, which is the strong column, will brace the left
column. The result is an increase in K for the right column
and a decrease in K for the left column. Table 2 shows the
variation of K for the two columns as increases.
For Frame C, the two columns have different lengths. The
strong column is the shorter column. As can be seen in Table
3, the phenomenon that the K factor of the stronger column
increases and the K factor of the weaker column decreases as
increases is observed.
Another commonly encountered situation which involves
the interaction between a strong column and weak col-
umn is a leaner-column frame shown in Fig. 2. The leaner
column, which is the weak column, provides no lateral
resistance to the frame at buckling. Consequently, only the
right column will be effective in resisting the P overturning
moment which develops during buckling. When the load in
the weak column increases, the K factor of the strong
column increases as the P moment intensifies. This phe-
Table 1.
Theoretical K Factors for Columns of Frame A
I
right column
/ I
left column
K
left column
K
right column
1
2
4
6
8
10
2.00
1.64
1.27
1.08
0.96
0.88
2.00
2.31
2.54
2.65
2.72
2.78
Table 3.
Theoretical K Factors for Columns of Frame C
L
left column
/ L
right column
K
left column
K
right column
1.0
1.5
2.0
2.5
2.00
1.51
1.16
0.93
2.00
2.27
2.31
2.32
Table 2.
Theoretical K Factors for Columns of Frame B
P
left column
/ P
right column
K
left column
K
right column
1
2
4
6
8
10
2.00
1.73
1.59
1.53
1.51
1.49
2.00
2.45
3.17
3.76
4.26
4.72
Fig. 1. Demonstration frames.
FOURTH QUARTER / 1992 151
nomenon is depicted in Table 4 in which theoretical values
for the effective length factor of the strong column are
shown as the applied load on the weak column increases.
The theoretical K factors for the leaner column are not
shown in the table but they can be determined as follows:
Recognizing that the leaner column is being braced by the
rigid column, one can develop a simple model for the leaner
column. The model is shown in Fig. 3. The portion of the
frame which provides lateral stability to the structure is rep-
resented by a translational spring with a spring stiffness of S.
An eigenvalue analysis of this system yields the solutions.
(P)
cr
smaller of
'
2
EI
L
2
SL
(5)
Substituting Eq. 5 for P
i
into Eq. 4 gives
K larger of
'
2
EI
SL
3
(6)
For frames of usual proportions, the quantity
2
EI / SL
3
nor-
mally does not exceed unity and so K = 1 often governs. In
the context of design, a designer can use K = 1 for the leaner
columns provided that accurate values of K are used for the
rigid columns. In evaluating K factors for the rigid columns,
the P effect generated in the leaner column must be con-
sidered to reflect the destabilizing influence of the leaner
column has on the overall stability of the frame.
For all the cases presented in the preceding discussions, a
direct use of the alignment chart gives K = 2 for all the rigid
columns. Significant errors are observed for a number of
cases because the alignment charts were not developed to
account for the interaction effect that occurs among columns
having different values of L P / EI . In what follows, a simple
yet accurate procedure to determine the elastic K factors for
framed columns will be developed. The procedure makes use
of the correlation between stability and magnification effects
on frames. The validity of the proposed procedure will be
demonstrated by numerical examples.
DERIVATION OF THE PROPOSED K FACTOR
When members of a frame are subjected to compressive
forces, two types of instability effects will arise. Member
instability (or P) effect arises as the axial force in the
member acts through the lateral displacement of the member
relative to its chord. Frame instability (or P) effect arises
as the axial force acts through the relative end displacements
of the member. Both types of instabilities affect the effective
length factor of the member. Member instability reduces the
flexural rigidity of the member whereas frame instability
increases the drift and hence the overturning moment of the
frame. This increase in moment is often accounted for in
design by a moment magnification factor. It should be noted
that a correlation exists between this moment magnification
effect and the K factor. This correlation will be explored in
further detail in a later section of this paper. In the meantime,
a simple formula for calculating K factors for framed columns
will be derived. The proposed K factor formula accounts for
both the member and frame instability effects explicitly and
it gives accurate results for frames which exhibit the strong
column-weak column phenomenon.
For the sake of clarity, member instability and frame insta-
bility effects will be treated separately in the formulation.
Member Instability Effect
In a theoretical context member instability (P) effect is
accounted for by the use of stability functions.
12
For the
member shown in Fig. 4, the slope-deflection equations relat- Fig. 3. Model for the leaner column.
Fig. 2. Leaner-column frame.
Table 4.
Theoretical K Factors for the Rigid Column of the
Leaner Column Frame
P
left column
/ P
right column
K
right column
0
2
4
6
8
10
2.000
3.249
4.139
4.871
5.502
6.077
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 152
ing the member-end moments (M
A
, M
B
) and member-end
rotations (
A
,
B
) are given by
M
A
EI
L
(s
ii
A
+ s
ij
B
) (7a)
M
B
EI
L
(s
ij
A
+ s
ii
B
) (7b)
where EI is the flexural rigidity and L is the length of the
member. s
ii
and s
ij
are stability functions which are expressed
in terms of the axial force P in the member. Expressions for
these functions are given in Ref. 12 and will not be shown
here. Simplified forms for these functions will be used in this
paper.
If the axial force P in the member is negligible, Eqs. 7a and
7b reduce to
M
A
EI
L
(4
A
+ 2
B
) (8a)
M
B
EI
L
(2
A
+ 4
B
) (8b)
For the case in which the member bends in reverse curva-
ture so that
A
=
B
= , Eqs. 7a and 7b become
M
A
M
B
EI
L
(s
ii
+ s
ij
) (9)
and Eqs. 8a and 8b become
M
A
M
B
6EI
L
(10)
Using Taylor series expansion for (s
ii
+ s
ij
), we obtain
s
ii
+ s
ij
6
PL
2
10EI
+ (11)
Substituting Eq. 11 into Eq. 9, we have
M
A
M
B
6EI
L
1
PL
2
60EI
_
,
(12)
The approximation sign is used in the above equation because
only two terms are retained in the Taylor series expansion.
Upon comparison of Eq. 12 with Eq. 10, it can be con-
cluded that when a member bends in reverse curvature, the
member instability effect reduces the flexural rigidity of the
member by an amount of 1 PL
2
/ 60EI.
Similarly, for the case in which the member bends in single
curvature so that
A
=
B
= , Eqs. 7a and 7b become
M
A
M
B
EI
L
(s
ii
s
ij
) (13)
and Eqs. 8a and 8b become
M
A
M
B
2EI
L
(14)
Again, using Taylor series expansion for s
ii
s
ij
, we obtain
s
ii
s
ij
2
PL
2
6EI
+ (15)
Retaining the first two terms in the series and substituting the
result into Eq. 13, we have
M
A
M
B
2EI
L
1
PL
2
12EI
_
,
(16)
Upon comparison of Eq. 16 with Eq. 14, it can be seen that
the member instability effect for a member bends in single
curvature reduces the flexural rigidity of the member by an
amount of (1 PL
2
/ 12EI).
Finally, for the case in which one of the member-end
moment (say, M
A
) is zero, Eq. 7b becomes
M
B
EI
L
s
ii
s
ij
2
s
ii
_
,
B
(17)
and Eq. 8b becomes
M
B
3EI
L
B
(18)
A Taylor series expansion for the terms in parenthesis in
Eq. 17 gives
s
ii
s
ij
2
s
ii
3
PL
2
5EI
+ (19)
which, upon substitution into Eq. 17 gives
M
B
3EI
L
1
PL
2
15EI
_
,
B
(20)
A comparison between Eq. 20 and Eq. 18 reveals that the
member instability effect reduces the flexural rigidity of this
member by a factor of 1 PL
2
/ 15EI.
In the foregoing discussions, it was seen that when M
A
/ M
B
= 1, member instability effect would reduce the flexural stiff-
ness of the member by a factor of 1 PL
2
/ 60EI. When
M
A
/ M
B
1, this stiffness reduction factor was 1 PL
2
/
15EI, and when M
A
/ M
B
0 the factor was 1 PL
2
/ 15EI.
Assuming that the stiffness reduction factor varies paraboli-
cally from a moment ratio of 1 to 1, a general stiffness
reduction factor suitable for any moment ratio which can be
Fig. 4. A beam-column element.
FOURTH QUARTER / 1992 153
used to account for the member instability effect can be
written as
r 1
P
5L
(21)
where
(3 + 4.8m + 4.2m
2
)EI
L
3
(22)
In the above equations, r is the member instability (P)
stiffness reduction factor, is the member stiffness index, P
is the compressive axial force in the member, EI is the flexural
rigidity of the member, and m is the ratio of the smaller to
larger end moments of the member; m is taken as positive if
the member bends in reverse curvature and it is taken as
negative if the member bends in single curvature. Theoreti-
cally, the end moments used for calculating this moment ratio
should be the moments developed in the member when the
frame buckles. Since exact values for these moments are
difficult to obtain, a simplified procedure will be used to
obtain approximate values for these moments. In this proce-
dure, a small disturbing force equal to a fraction of the story
gravity loads is applied laterally to the frame. The moments
developed in the member due to this disturbing force are used
to calculate the moment ratio in Eq. 22. This procedure is
demonstrated in an illustrative example in a later section of
this paper.
Equation 21 indicates that the effect of member instability
(i.e., the P effect) can be expressed as a function of the
moment ratio of the member. The use of moment ratio to
account for the P effect is not uncommon in design prac-
tice. For instance, the P moment magnification factor B
1
used in the current AISC-LRFD Specification
1
is also ex-
pressed as a function of moment ratio of the member under
consideration. The inclusion of member instability effect in
the formulation of a K factor equation is indispensable if the
interaction effect between member and frame instability is to
be accounted for. The use of moment ratio implicitly takes
account of the interaction effect of the various members of
the frame. If the alignment charts were used, this interaction
effect was accounted for by the G factors. A drawback for the
G factors is that they only account for the interaction effect
of members in the immediate neighborhood of the member
under investigation. The proposed approach does not suffer
from this shortcoming because the member-end moments to
be used in Eq. 22 are determined from a global frame analysis.
Frame Instability Effect
In the context of design, frame instability is conveniently
accounted for by the use of the story stiffness concept. If we
denote s
Im
as the first-order member lateral stiffness and S as
the story stiffness accounting for the P effect. The two
stiffness are related by the equation
S rs
Im
P
L
_
,
(23)
where r is the member instability reduction factor defined in
Eq. 21, (P / L) is the sum of the axial load to length ratio for
all members of the story.
Since the first-order member lateral stiffness s
Im
is propor-
tional to the member stiffness index defined in Eq. 22, Eq.
23 can be written in the form
S r
S
I
_
P
L
_
,
(24)
or
S
P
L
_
1
S
I
_
,
1
1
]
S
I
(25)
where S
I
is the first-order story stiffness.
Using Eq. 21 and substituting H /
I
(where H is story
lateral loads producing
I
, and
I
is the first-order inter-story
deflection) for S
I
into Eq. 25, we obtain
S
1
(P / L)
5
_
P
L
_
r
H
_
,
1
1
]
S
I
(26)
The terms in brackets is the stiffness reduction factor for the
story. Inverse of this factor is the moment magnification
factor, A
F
A
F
1
1
(P / L)
5
_
P
L
_
I
H
_
,
(27)
The similarity in form between Eq. 27 and Eq. H1-5 of the
AISC-LRFD Specification
1
is apparent. In fact, if the member
instability effect is ignored, the term (P / L) / 5 vanishes
and Eq. 27 will be reduced to Eq. H1-5.
Proposed K factor Formula
Equation 27 is applicable to all members of the story. Suppose
we are interested in calculating the K factor for the i-th
member, we can equate Eq. 27 with the member moment
magnification factor
12
(A
F
)
i
1
1
P
i
(P
ek
)
i
(28)
where (P
ek
)
i
=
2
EI
i
/ (K
i
L
i
)
2
.
Equating Eqs. 27 and 28, and solving for K
i
, we obtain
K
i
2
EI
i
P
i
L
i
2
_
P
L
_
1
5
+
I
H
_
,
1
1
]
(29)
Equation 29 is the proposed K factor formula. In the
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 154
equation, EI
i
and L
i
are the flexural rigidity and length of the
member, respectively. P
i
is the axial force in the member,
(P / L) is the sum of the axial force to length ratio of all
members in a story, H is the story lateral loads producing
I
,
I
is the first-order inter-story deflection, and is the
member stiffness index defined in Eq. 22. It is important to
note that the term H used in Eq. 29 is not the actual applied
lateral load. Rather, it is a small disturbing force (taken as a
fraction of the story gravity loads) to be applied to each story
of the frame. This disturbing force is applied in a direction
such that the displaced configuration of the frame will resem-
ble its buckled shape. The member-end moments calculated
using a first-order analysis under the action of this disturbing
force will be used in Eq. 22 to evaluate the member stiffness
index.
The derivation of Eq. 29 takes into account both the P
and P effects that are present in the frame at buckling. As
a result, the equation is expected to give accurate results for
design. In applying Eq. 29, the designer must perform a
first-order frame analysis under a small disturbing force H
to determine
I
and the member-end moments. The member
stiffness index (Eq. 22) is then calculated for each member.
Once and
I
are calculated, Eq. 29 can be used to calculate
K. The procedure will be demonstrated in an illustrative
example in a following section.
Before proceeding any further, it is of interest to compare
Eq. 29 with Eq. 4. In Eq. 4, the term P
i
is the axial force in
the column at buckling (i.e., the critical load). Both the P
and P effects are implicit in P
i
. In Eq. 29, P
i
is the axial
force in the column without accounting for the two instability
effects. These effects are accounted for explicitly by the terms
in brackets. A relationship between P
i
and P
i
can be obtained
by equating the two equations giving
P
i
P
i
P
L
_
1
5
+
I
H
_
,
(30)
An advantage of using Eq. 29 over Eq. 4 is that all terms
in Eq. 29 can be obtained readily by inspection or from a
simple first-order analysis. As will be demonstrated later,
despite the simplicity in form, Eq. 29 gives sufficiently accu-
rate results for design purposes.
FURTHER STUDIES OF THE PROPOSED
K FACTOR EQUATION
As mentioned earlier in this paper, a correlation exists be-
tween the K factor and the moment magnification effect. This
correlation is rather transparent in Eq. 29. Recalling that the
terms in brackets represent the instability effects associated
with frame buckling, it is not difficult to infer that as these
effects intensify, the K factor increases for the member. From
Eq. 28, it can be seen readily that A
F
increases with K. Thus,
an accurate assessment for K is rather important in a valid
limit state design of frames subjected to heavy gravity loads.
In what follows, it will be shown that the proposed K factor
equation can be reduced to other K factor formulas proposed
in the past by other researchers.
Consider the case in which the P effect is negligible,
we can ignore the member stiffness reduction effect and
disregard the term (P / L) / 5 i n Eq. 29. Setting
(P / L) / 5 = 0 and substituting Eq. H1-5 of the AISC-
LRFD Specification,
1
i.e.,
A
F
1
1
P
I
HL
or
P
I
HL
1
1
A
F
(31)
into Eq. 29, we obtain
K
i
2
EI
i
P
i
L
i
2
1
1
A
F
1
1
]
(32)
Equation 32 was proposed by Cheong-Siat-Moy.
13
In Ref. 13,
A
F
is defined as the ratio of the second-order deflection to the
first-order deflection of a given story. Thus, the use of Eq. 32
necessitates a second-order frame analysis. On the contrary,
the use of the proposed K factor equation (Eq. 29) only
requires the designer to perform a first-order analysis.
Now, suppose we use Eq. H1-6 of the AISC-LRFD Speci-
fication
2
as the P moment magnification factor, i.e.,
A
F
1
1
P
P
ek
(33)
Substituting the above equation for A
F
into Eq. 32, we obtain
K
i
2
EI
i
P
i
L
i
2
P
P
ek
_
,
(34)
Equation 34 was proposed by LeMessurier
14
for the evalu-
ation of effective length factors for framed columns. A more
elaborate formula for K was also proposed by LeMessurier.
4
However, the application of the LeMessuriers formulas re-
quires the use of the alignment chart for solutions. The use of
Eq. 29, on the other hand, is completely independent of the
alignment chart solutions.
AN ILLUSTRATIVE EXAMPLE
To demonstrate the procedure for applying Eq. 29 to deter-
mine K factors for columns in sway frames, the frame shown
in Fig. 5a will be used. To initiate sway in a buckling analysis,
a small lateral load (a disturbing force) H equals to 0.1
percent of the story gravity loads (i.e., H = 0.1 percent
5P = 0.005P) is applied to the frame. This is shown in Fig.
5b. The value of 0.1 percent was selected purely for concep-
tual purpose. In practice, any value can be chosen since the
quantities
I
/ H and M
A
/ M
B
required for applying Eq. 29
FOURTH QUARTER / 1992 155
are not affected by the value of lateral load used. This is
because in a first-order analysis, all quantities vary linearly
with the applied load and so the ratio of the quantities will
remain unchanged.
It is important to note that the term H represents a small
disturbing force. It is not the actual lateral load that the frame
may be subjected to. In fact, for frames which are subjected
to a system of lateral loads, these lateral loads should be
removed in the analysis for the effective length factor K. The
reason for this is that in a buckling analysis, only the effect of
axial forces but not the lateral forces should be considered.
The purpose of applying a small disturbing force to the frame
is merely to establish an adjacent equilibrium configuration
for the frame. This adjacent equilibrium configuration will be
the preferred configuration for the frame when the original
configuration ceases to be stable once the axial loads in the
columns reach their critical values. In theory, this adjacent
equilibrium configuration is the buckled shape of the frame.
The exact buckled configuration of the frame can be obtained
from an eigenvalue analysis. In practice, this buckled con-
figuration can be approximated by subjecting the frame to a
small disturbing force as shown in Fig. 5b. The direction of
this disturbing force is applied from left to right for this
problem because the structural geometry and loading are such
that the frame will most likely buckle in that direction. For
frames which exhibit no preferred direction for buckling (e.g.,
frames which are symmetric in terms of both structural ge-
ometry and loading), the direction of this disturbing force is
unimportant.
Applying a disturbing force H of 0.005P to the frame, a
first-order analysis yields
I
= 7.13 10
4
P. So
I
/ H =
0.143. The remaining calculations are depicted in tabulated
form (see Table 5). (Units are in kips and inches).
For comparison, the theoretical K values obtained from an
eigenvalue analysis
15
are 1.347 and 0.710 for the left and right
columns, respectively. Thus, excellent correlation is ob-
served.
If one uses the alignment chart, the K factor are obtained
as 1.09 for the left column and 1.07 for the right column. The
errors are rather significant. Using Eq. 34, the K factors are
calculated to be 1.44 and 0.76 for the left and right columns,
respectively.
NUMERICAL EXAMPLES
A valid K factor formula suitable for design application must
satisfy the following criteria:
1. Simple to use
2. Transparent in form
3. Versatile in application
4. Accurate for design purpose
The proposed formula is simple to apply since it only
requires the user to perform a first-order analysis; the use of
special charts are not required. It is transparent in form
because the two instability effects (P and P) that have a
predominant influence on K are explicitly accounted for in
the equation. In what follows, it will be demonstrated that the
proposed equation is also applicable to a variety of conditions
and it gives sufficiently accurate results for design applica-
tion.
Example 1
The objective of this example is to demonstrate that the
proposed K factor equation is applicable for frames with
unequal distribution of column stiffness and gravity loads.
The demonstration frame is shown in Fig. 6. The frame is a
simple portal frame and consists of one beam and two col- Fig. 5. An unequal leg frame.
Table 5
Column I L P
M
A
M
B
m M
A
/ M
B
P / L K
left
right
288
480
240
480
2P
2P
0.419P
0.245P
0.530P
0.256P
0.791
0.957
5.89
1.49
0.00833P
0.00625P
1.35
0.71
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 156
umns. The flexural rigidity of the right column is three times
that of the beam and the left column. Three load cases are
investigated. In Load Case A, a gravity load of 2P is applied
to the left column only. In Load Case B, the gravity load of
2P is evenly distributed on the columns. In Load Case C, all
gravity loads are applied on the right column. As in the
illustration example shown earlier, a small disturbing force of
0.1 percent times the total gravity loads acting on the frame
(i.e., 0.1 percent 2P = 0.002P) was applied laterally to the
frame to establish an adjacent equilibrium configuration for
the frame from which the moment ratios were calculated
using a first order analysis. The K factors for the loaded
columns evaluated using Eq. 29 are compared with those
evaluated using an eigenvalue analysis as well as those evalu-
Table 6
Load Case Column
K Factors
Eq. 29 Theoretical
Alignment
Chart Eq. 34
A left 1.42 1.46 2.3 1.35
B
left
right
2.01
3.48
1.99
3.44
2.3
2.9
1.91
3.32
C right 2.46 2.38 2.9 2.34
Table 7
Load Case Column
K Factors
Eq. 29 Theoretical
Alignment
Chart Eq. 34
A
B
right
right
3.70
2.62
3.69
2.64
2.60
2.60
3.68
2.60
Fig. 6. Frame for Example 1. Fig. 7. Frame for Example 2.
FOURTH QUARTER / 1992 157
ated using the alignment chart and Eq. 34 in Table 6. (Note
that K is not defined for the unloaded columns).
From Table 6, it can be seen that Eq. 29 gives sufficiently
accurate results for K and that significant errors are incurred
by using the alignment charts. If the alignment charts are to
be used, the solutions must be refined by using Eq. 34.
Example 2
In this example the ability of the proposed K factor equation
to evaluate effective length factors for columns in frame with
leaner columns will be demonstrated. Such a frame is shown
in Fig. 7. Two load cases are used. In Load Case A, a gravity
load of P is applied on each column and in Load Case B, the
entire gravity load of 2P is applied on the right column. To
establish an adjacent equilibrium position for the frame, a
small disturbing force of 0.1 percent 2P = 0.002P was
applied laterally to the frame and the moment ratios were
calculated using a first-order analysis. The K factors for the
right column evaluated using Eq. 29, the alignment chart, and
Eq. 34 are compared with the theoretical K factors evaluated
using an eigenvalue analysis in Table 7.
Again, the accuracy of Eq. 29 and the inability of the
alignment chart to give correct values of K are demonstrated.
Table 8
First-story
Column I L P m P / L K
left
middle
right
920
626
472
138.96
138.96
138.96
352.5
604.5
252.0
0.735
0.935
0.878
87.5
75.5
53.3
2.537
4.350
1.813
1.39
0.87
1.18
Second-story
Column I L P m P / L K
left
middle
right
470
470
200
120
120
120
105.0
183.4
78.4
0.382
0.947
0.800
42.9
89.2
32.0
0.875
1.528
0.653
1.58
1.21
1.20
Table 9
Story Column
K Factors
Eq. 29 Theoretical
Alignment
Chart Eq. 34
first
left
middle
right
1.39
0.87
1.18
1.36
0.86
1.16
1.19
1.06
1.07
1.40
0.88
1.18
second
left
middle
right
1.58
1.21
1.20
1.73
1.31
1.30
1.25
1.11
1.12
1.40
1.06
1.05
Fig. 8. Frame for Example 3.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 158
Example 3
As a final example, Eq. 29 is used to calculate the K factors
for the six columns of the two-story two-bay frame shown in
Fig. 8. The small disturbing forces required to establish an
adjacent equilibrium position for the frame are calculated
from the equation 0.1 percent Applied Story Gravity Load.
This gives a value of 0.367 kips for the top story and 0.842
kips for the bottom story. Subjecting the frame to these
disturbing forces, a first-order analysis gives
I
/ H =
0.00483 for the first story and 0.00792 for the second story.
The remaining calculations are depicted in tabulated form
shown in Table 8. (Units are in kips and inches.)
For purpose of comparison, values of the K factors obtained
using different approaches are shown in Table 9.
SUMMARY AND CONCLUSIONS
A simple and effective formula for evaluating elastic effective
length factors for framed columns in sway frames was de-
rived. The formula takes into consideration the member in-
stability and frame instability effects explicitly. As a result, in
addition to providing the users with a clear physical picture
of the two destabilizing influences on column stability, the
formula gives reasonably accurate results for design applica-
tion. The explicit consideration of the two instability effects
also eliminates the need for a second-order analysis. The
application of the proposed formula only requires the user to
perform a first-order analysis. No special charts or iterations
are required for solutions. The formula provides sufficiently
accurate estimates for K factors of columns in frames with
unequal distribution of column stiffness, unequal distribution
of gravity loads and for frames with leaner columns. The
validity of the proposed K factor equation when applied to
these cases was demonstrated by numerical examples.
The applicability of Eq. 29 for determining K factors of
columns stressed into the inelastic range is currently being
investigated. The approach makes use of the tangent modulus
concept and uses the tangent modulus E
t
in place of the elastic
modulus E in determining the various parameters in Eq. 29.
Detailed discussion for determining this inelastic K factor will
be addressed in a subsequent paper.
REFERENCES
1. Load and Resistance Factor Design Specification for
Structural Steel Buildings, American Institute of Steel
Construction, Chicago, Illinois, 1986.
2. Specification for Structural Steel BuildingsAllowable
Stress Design and Plastic Design, American Institute of
Steel Construction, Chicago, Illinois, 1989.
3. Chu, K.-H. and Chow, H. L., Effective Column Length
in Unsymmetrical Frames, Publ., Int. Assoc. Bridge
Struct. Eng., Vol. 29, No. 1, 1969.
4. LeMessurier, W. J., A Practical Method of Second-Order
Analysis, Part 2Rigid Frames, Engineering Journal,
AISC, Vol. 14, No. 2, 1972, pp. 4867.
5. Wood, R. H., Effective Lengths of Columns in Multi-
story Buildings, Structural Engineers, Vol. 52, No. 7,8,9;
1974, pp. 235244, 295302, 341346.
6. Wu, H.-B., Determination of Effective Length of Un-
braced Framed Columns, Proceedings, Structural Sta-
bility Research Council, 1985, pp. 105116.
7. Bridge, R. Q. and Fraser, D. J., Improved G-Factor
Method for Evaluating Effective Lengths of Columns,
Journal of Structural Engineering, ASCE, Vol. 113, No.
6, 1987, pp. 13411356.
8. Duan, L. and Chen, W. F., Effective Length Factor for
Columns in Braced Frames, Journal of Structural Engi-
neering, ASCE, Vol. 114, No. 10, 1988, pp. 23572370.
9. Duan, L. and Chen, W. F., Effective Length Factor for
Columns in Unbraced Frames, Journal of Structural
Engineering, ASCE, Vol. 115, No. 1, 1989, pp. 149165.
10. Basu, P. K. and Lee, S. L., Effective Length Factor of
Columns in Frames, Proceedings, Structural Stability
Research Council, 1991, pp. 441448.
11. Yura, J. A., The Effective Length of Columns in Un-
braced Frames, Engineering Journal, AISC, Vol. 8, No.
2, 1971, pp. 3742.
12. Chen, W. F. and Lui, E. M., Structural StabilityTheory
and Implementation, Elsevier, New York, 1987.
13. Cheong-Siat-Moy, F., The K-Factor Paradox, Journal
of the Structural Division, ASCE, Vol. 112, No. 8, 1986,
pp. 17471760.
14. Gaylord, E. H. and Gaylord, C. N., Structural Engineer-
ing Handbook, 3rd edition, Section 8Design of Steel
Structural Members, McGraw-Hill, New York, 1990.
15. Halldorsson, O. P. and Wang, C.-K., Stability Analysis
of Frameworks by Matrix Methods, Journal of the Struc-
tural Division, ASCE, Vol. 94, No. ST7, July, 1968, pp.
17451760.
FOURTH QUARTER / 1992 159
INTRODUCTION
Computer aided structural engineering is no longer an idea
that has to be sold. In steel structures it is widely used from
start to finishfrom planning to erection. Nevertheless, its
still at a critical stage. Further development is essential and
the present incidence of misuse is disturbing.
Inevitably, use of the medium will continue to grow and its
scope expand. Promotion of the process is one of the two
themes of this paper. The other is the need to minimize its
misuse.
AISC SPECIFICATIONS
For reasons that will become clear, it is appropriate to take
two milestone editions of the AISC Specification as points of
reference. The first is the 1963 Edition for which Ted Higgins
deserves great credit.
1
The second is the 1986 LRFD Speci-
fication developed under the leadership of Bill Milek and
Gerry Haaijer.
2
The 1963 Specification introduced to general American
practice findings from many years of research: the effective
length concept, amplification factors, semi-tension field be-
havior, plastic design, etc. But although it was published
when computers were coming into use, philosophically it was
rooted in pre-computer practice. This is evident in a 1954 note
of George Winters proposing adoption of the effective length
concept. He said: It is the purpose of the present effort to
suggest such relatively simple improvements to present de-
sign practice which would result in minimum changes to
customary procedures and yet would lead to sizeable econ-
omy where present procedures are over-conservative, and to
assured safety where present methods are unsafe.
3
The 1986 LRFD Specification was the next major advance.
Among other things, it forces recognition of the variability of
loads and resistances. And in requiring consideration of both
response under service loads, when normal structures are
elastic, and resistance to factored loads, when inelastic behav-
ior would be probable, it emphasizes the importance of both
modes of behavior. It should lay to rest any remaining notions
that elastic design and plastic design are independent,
competing philosophies. It also recognizes that todays de-
signers have computers. Its basic provisions are simpler than
earlier ones, but it is useful to have a computer on hand to
make the multiple numerical checks sometimes required.
Nevertheless, it was not conceived as a computer dependent
code nor is it necessarily one. For example, it is written so
that both elastic and inelastic action can be accounted for
without the use of advanced computerized analysis.
The genius of Higgins, Winter, and other innovators of their
time is captured in the quoted statement of Winters. They
were able to introduce basic concepts into practice in simple
ways. They did their work thoroughly and it still serves us
well. But times change. In the 1950s the computer was not
the powerful, potentially dominating force it is now. Now
there are different problems and different opportunities. The
development of a medium that will enable the user to take full
advantage of its enormous computational power without be-
coming subservient to it involves some of each.
CORNELL RESEARCH
It was with this in mind that we started our Cornell research
on the use of interactive graphics in the mid 1970s. Graphics
had become a reality and computers powerful enough to
enable designers to use advanced methods of analysis were
on the horizon. It seemed obvious that here at last was the
computerized medium that would enable engineers to retain
intimate control of their work. In all of this research weve
emphasized problems involving nonlinearity and three di-
mensionality. Weve also viewed analysis as an integral part
of design, which means that the engineer should have the
ability to call immediately upon either analysis routines or
design sequences. He should be able to restart, redo, or enter
any place in the process in almost any order.
A few pictures sketch the course of this research. Figure 1
is a black and white reproduction of one of our initial efforts:
a 1977 color coded image of force distribution and plastic
hinges in a small plane frame. Figure 2 is a load-displacement
response curve from the second order inelastic analysis on
which the first figure was based. Progressive plastic hinge
formation, the strength limit point, and post-limit behavior
are evident. Figure 3 takes us to 1985. It contains results of a
linear, time-history dynamic analysis of a three dimensional
frame.
Figure 4 is of the control menu of CU-STAND, an inte-
grated analysis and design program for research and educa-
tion we developed in the mid 80s. The Analysis section
has provisions for first and second order elastic and inelastic
analysis. The Strength Design and Stiffness Design sec-
W. McGuire is professor emeritus at Cornell University. This
paper won the 1992 T. R. Higgins Leadership Award.
Computers and Steel Design
W. McGUIRE
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 160
tions have routines for obtaining adequate strength and
stiffness.
Figure 5 is the menu in the Strength Design section of
CU-STAND that enables the user to apply selected LRFD
design equations. For example, by pointing to Compression
and Moment Z, the interaction equation for axial compres-
sion and strong axis bending is selected as a design check and
displayed on the computer screen for information. If details
of this equation are desired they can be obtained on the bottom
of the screen. The column equation is shown as an example.
This menu illustrates the type of feature included to enable
the user to keep in direct, visual control of his work. The
computer makes the calculation, but the designer tells it
exactly what to do.
Figure 6 illustrates the use of CU-STAND in a 1990 re-
search study of the elastic and inelastic behavior of a 22-story
rigid frame building.
Details of CU-STAND and other programs developed by
Cornell graduate students in the course of their research have
been reported in numerous technical papers.
4
COMMERCIAL PROGRAMS
Much of the type of technology just illustrated can now be
found in commercial programs. For example:
1. As graphical displays, Figs. 1 and 2, which were novel
15 years ago, are primitive compared to the graphics of
todays commercial programs.
2. Commercially, three dimensional linear elastic analysis
of frames and continua is now handled thoroughly. Two
dimensional second order elastic frame analysis pro-
grams are also widely available.
3. Commercial programs that integrate analysis and design
in a coordinated interactive graphics package also exist.
Figure 7 contains illustrations from one such package,
the Intergraph workstation-based MicasPlus system
which contains three units: MPA (Analysis), MPD (De-
sign), and MPMD (ModelDraft).
5
MPA has frame mod-
eling, analysis, and analysis postprocessing capabilities.
Line, plane, and solid elements are available, as are
linear elastic static and dynamic analysis and nonlinear
elastic static analysis. MPD evaluates results generated
by MPA. It contains provisions of several American and
foreign steel and concrete specifications. They can be
used either in selecting member sizes or to check the
adequacy of preassigned members. MPMD is an associ-
ated drawing production package. To my knowledge, the
analysis and design capabilities of commercial programs
of this type are still limited to those for which there is a
clear demand.
4. Commercial inelastic analysis programs are available,
but in civil engineering practice they are presently used
mainly for special studies. Figure 8 contains results of
one application, the use of a second order inelastic
analysis program to verify the intended post yield behav-
ior of an earthquake resistant frame consisting of outer
braced super columns connected by moment resistant
link beams, a system that does not fit conveniently into
code defined categories. This study, which demonstrates
some of the potential of advanced analysis, was made by
engineers of the firm of Skidmore, Owings, and Merrill.
The program ANSR-III, with graphical postprocessing
developed by the SOM staff, was used.
6
In Fig. 8b, the
dots that represent plastic hinges in successive stages of
an equivalent static analysis verified that, as intended,
there would be extensive yielding in the link beams prior
to any yielding in the braced bays. This desirable mode
of response, which has better energy dissipation proper-
Fig. 1. Plane frame force distribution, 1977. Fig. 2. Plane frame response curve, 1977.
FOURTH QUARTER / 1992 161
ties than one in which buckling in the braced frames
comes first, was further confirmed by a separate inelastic
dynamic analysis.
Thus we see that some subjects of earlier research, such as
the use of interactive graphics and three dimensional analysis,
have passed into the realm of commercial product develop-
ment. Others, notably the development of practical, compre-
hensive, second order inelastic analysis, still require further
research and a demand from practice that will justify the cost
of software development.
One of the undesirable side effects of the continuing revo-
lutions in hardware and underlying software that have made
the advances of the last fifteen years possible has been a
complication of the task of developing and assimilating ap-
plications software. The needed fusion of workstation and
personal computer technologies is coming, but too slowly.
And the variety of operating and graphics systems remains an
obstacle to program dissemination.
TECHNOLOGY AND THE INDIVIDUAL
Even though todays computer aided engineering systems are
not the ultimate in all respects, the better ones are indeed very
powerful. They enable an engineer to consider framing con-
cepts deemed impractical in earlier times and to carry them
to fruition as safe, economical structures through studies and
analyses that would have been impossible before the com-
puter. But, contrary to what is often said, computerized tech-
nology places morenot lessof a burden on the individual.
Use of the best programs requires a thorough knowledge of
structures and an understanding of their capabilities and
limitations.
Unfortunately, these criteria are not always met. In a recent
Engineering News Record article,
7
leaders in the development
and application of computer aided engineering expressed
alarm over the incidence of its misuse. They gave numerous
examples and some of them predicted that a catastrophic
failure attributable to computer misuse is only a matter of
time.
I share their concern, but abuse of the computer is not the
only problem in structures. In my own experience the most
alarming examples are violations of the principles of good
weld design and practice that have contributed to serious
failures. I am reminded of Omer Blodgetts Higgins Award
papers on the dos and donts of welding.
8
For years Ive used
these and examples of my own in lecturing students on
awareness of the problems, as well as the virtues, of welding.
My point is not to condemn welding, but rather to point out
that although computer misuse has its special characteristics
and dangers, it is but one example of the eternal problem of
coping with side effects of advancing technology. There are
no complete solutions to this, but one thing is clear: trying to
halt the advance is not the answer.
Directions in research and development, education, and
standardization that should further the use of computers and
reduce their abuse will be discussed below. But ultimately,
regardless of anything that might be done, safe computer use
depends on the individual. The user has the responsibility to
apply sound technology intelligently and conscientiously, and
to stand behind the results.
Fig. 3. Earthquake analysis, 1985. Fig. 4. CU-STAND control page, 1988.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 162
The important point is to be mindful of this. By that I mean
to ask oneself at the start of a job: do I know how to do it, will
I take the time to do it decently and, if in the end I fail, will I
be ready to accept the consequences? If answered honestly,
this exercise can make the difference between using sophis-
ticated technology without proper preparation, taking the
time to understand it and learn how to use it, or falling back
on less advanced but sound methods that one knows well.
RESEARCH AND DEVELOPMENT
The line between research and development isnt a sharp one.
Commercial organizations and universities have a role in
each, but some distinctions can be made:
Commercial Research and Development
Commercial software organizations are active in the further
development of three dimensional elastic analysis. But I dont
see comparable coverage of steel design provisions, to the
extent available in AISCs ELRFD for example.
9
As a mini-
mum, practice should be ready for a commercial interactive
graphics analysis and design package in which ELRFD is the
integrated component used for code checking the results of a
linear or nonlinear elastic analysis. One feature should be
graphical interactive control of the reanalysis-redesign cycle.
There are other things that can best be done commercially.
They include the development of: 1) robust, efficient, and
thoroughly debugged software; 2) efficient graphics; 3) easily
transportable software for both workstations and advanced
personal computers; 4) clear instructions, written in the lan-
guage of structural engineering; and 5) easily mastered inter-
active controls that enable the user to obtain precisely the
information he wants when he needs it, and that dont flood
him with unwanted, undigestible informationin short, a
system that is responsive but unobtrusive.
Beyond the obvious there will be countless opportunities
for commercial software development that cant be foreseen
but that are certain to arise. They will only be recognized
where there is close contact and dialogue between structural
engineers and imaginative software experts.
University Research
My comments on research can be separated into a brief
statement of what we are now doing at Cornell and my
impressions of the general climate in university research:
Cornell Research. For the near future our research in com-
puter aided engineering will focus on the development of
practicable numerical methods for handling some of the
outstanding nonlinear problems in analysis and design.
10
One
effort is directed toward the inclusion of inelastic torsional-
flexural effects in existing programs. Another, under the
direction of my colleague, Greg Deierlein, deals with the
simulation of the geometric and material behavior of semi-
rigid connections.
These projects are in the natural progression of the line of
research we have been pursuing for 15 years. And they are
examples of the university research I referred to as still
needed for the development of practical, reasonably compre-
hensive second order inelastic analysis.
The General Climate. Measures of the vitality of university
research can be conflicting and misleading. Judged only on
the volume of output it looks healthier than ever before. Thirty
years ago I could keep up on the technical literature; I could
study many of the papers related to steel behavior, analysis,
or design. Twenty years ago I was reduced to reading journal
abstracts, ten years ago to skimming their tables of contents,
and now I cant get through all of the table-of-contents
services that cross my desk.
Much of this material is beyond the limits of helpfulness
however; at one end it is too close to theoretical mechanics to
have any near-time application to design and at the other end
too trivial a modification of things done before to be of value.
And much that is relevant is narrowly focused and heavily
explored. For example, a good second order inelastic analysis
Fig. 5. CU-STAND LRFD equation page, 1988. Fig. 6. Building frame study, 1990.
FOURTH QUARTER / 1992 163
program should be able to detect limit points and trace post
limit behavior. But this is a tricky, mind challenging problem
that has spawned a minor industry in the field of numerical
analysis: the search for the best solution. Unfortunately, so
many schemes are being suggested that it is difficult for
potential users to sort out the useful from the merely clever.
By another measure, research spending, recent signals are
not ambiguous, theyre clear and theyre disturbing. In its
latest report on the nations research, the National Science
Board said overall spending on research by the Federal Gov-
ernment, industry, universities, and private sponsors slowed
during the second half of the 1980s and began to fall in 1989.
This is happening at a time when similar investments in Japan
and Germany are rising rapidly. The chairman of the NSB,
who is also President of the University of Michigan, has said
that when coupled with educational woes it, should give us
Fig. 7. Integrated analysis and design program.
Courtesy of the Intergraph Corporation.
(b)
(a)
Fig. 8. Earthquake resistance, inelastic behavior study.
Courtesy of Skidmore, Owings & Merrill.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 164
real concern for the vitality of our research enterprise. Erich
Bloch, former director of the National Science Foundation
was more blunt. He said, Its bad news and it will probably
get worse.
11
With respect to research in steel structures, the picture is
every bit as gloomy. In the National Science Foundation, the
major supporter of this type of university research, funding
for all individual project research related to structural steel
has recently been less than one and one half million dollars
per year. This is poor support for potential contributors to one
of the countrys basic industries. And I dont see the NSF
funded centers making a major difference. Steel research in
The National Center for Earthquake Engineering Research in
Buffalo, for example, is minimal. The ATLSS Center at
Lehigh is doing significant steel research, but it has a broad
mission that requires it to spread its resources over a number
of activities. It cant concentrate on fundamental problems in
steel, as Lehigh did in the heyday of its research on plastic
design.
Specifically, and perhaps selfishly, I feel there is not
enough activity and competition in the area between struc-
tural mechanics and design practice. By this I mean the
transformation of established knowledge of behavior and
analysis into workable design procedures. If the computer
aided engineering of steel structures is to develop as it has the
potential to do, more research of this type is needed. Many of
the outstanding problems have been around for more than a
hundred years. But they remain challenging, and we now have
the computational environment essential to dealing with
them.
EDUCATION
The need for a good education in structures as a prerequisite
for the use of a computerized analysis or design system cant
be overemphasized. No designer without one should be per-
mitted to sit down unattended to the computer.
Eight years ago, in commenting on AISCs Partner in
Education Workshop recommendations on engineering edu-
cation, I said, The suggestions are good, but I feel they do
not go far enough since they are limited almost entirely to the
four-year undergraduate curriculum. I see little chance, for
example, that the typical good student can attain anything
close to a true understanding of modern structural analysis in
an undergraduate program structured as most American cur-
ricula are today, and as they will be if the present scheme of
things continues.
12
Since then there has been renewed emphasis on under-
graduate education in many universities as escalating costs
have made them increasingly aware of their dependence on
student tuition. More professors are spending more time with
undergraduates inside and outside the classroom, and effec-
tive pedagogy is receiving more attention. All of this is to be
applauded. But it relates mainly to how things are being
taught and not to the subject matter covered.
The changes in teaching methods are intended to increase
the students understanding and retention of the subject mat-
ter. The interactive computer graphics programs now used at
a number of institutions to supplement undergraduate instruc-
tion in structural analysis are examples of recent develop-
ments that do this. But the problem of adequate coverage of
the basic subject matter of contemporary structural engineer-
ing in the undergraduate years of the broad gage programs
now in vogue remains a formidable one and, to me, an
impossible one. There are a number of topics that I feel require
graduate or professional study.
There is much that is good in American engineering edu-
cation and in criticizing it Im entering an arena in which the
debate has been limitless, tiresome, and largely unproductive.
But I do so because I believe that, particularly in the education
of young people for the engineering of steel structures, it has
shortcomings that leave too many of them unprepared to use
present technology properly and without the background to
keep abreast of future developments.
The mechanics of computer programming and computer
use is not a concern. Todays young engineers are well pre-
pared in this respect. But the following are examples of the
topics I believe cannot receive adequate coverage in the
undergraduate years:
Connections. Universities should not be expected to cover all
aspects of connection design and detailing. But explanation
of the properties and characteristics of connecting devices and
the modes of behavior of major types of connections should
be treated. Also, the computer is making it possible to treat
connections as the structural elements they truly are by in-
cluding their properties in the analysis of a system. To take
advantage of this one needs an understanding of partially
restrained connections and how they influence the behavior
of the whole frame.
Stability. It is the nature of steel structures that all of their
strength limit statesexcept fatigue, fracture, and tension
member yieldingare in fact stability limits. An engineer
should have an understanding of the various manifestations
of this complex phenomenon as well as of the scope and
limitations of the classical and contemporary schemes used
for dealing with them. I question whether many young engi-
neers going into practice today have the elements of this
understanding.
Structural Analysis. Knowledge of the principles of contem-
porary methods of numerical analysismatrix and finite
element methods in particularis essential to the under-
standing of computerized analysis. And so is an appreciation
of the physical significance of analytical results. For example,
whereas in making calculations manually the choices of
support (boundary) conditions are limited, in computer pro-
grams any combination of all degrees of freedom may be
selected with little thought. If, as is often the case, the solution
FOURTH QUARTER / 1992 165
is sensitive to the choice, numerically consistent but com-
pletely unrealistic results may be obtained.
Nonlinearity. All design requires accounting for the possible
effects of geometric and material nonlinear behavior in some
way. But a good understanding of their physical causes and
the mathematical methods for handling both requires going
beyond elementary mechanics of materials and structural
analysis.
Torsion. Understanding the ways in which steel sections can
resist twisting (the significance of the J and the C
w
quantities in the steel manuals) is another subject that requires
going beyond elementary mechanics of materials.
Just as ominous for the future, if I am correct, is my
impression that many of the graduate students now studying
for the doctorate in structural engineering are not obtaining
the depth of understanding of these subjects that they should
have as tomorrows teachers and leaders of research.
STANDARDIZATION
Years ago, Hardy Cross commented on design practice in an
article on Standardization and Its Abuse, subtitled Intelli-
gent Standards Versus Standardized Intelligence.
13
He dis-
tinguished between the creative and the routine aspects of
engineering, and what he said cant be improved upon. To
quote: As the size and complexity of projects increased, the
time came when there was more work to do than men to do it
or time in which to think out problems. It became desirable
and even necessary to set up a series of routine procedures for
analysis and design. This meant the development of a series
of formulas and rules and standards which could be followed
within limits by men trained in that vocation. He observed
that there appeared then an intellectual assembly line with-
out which it would be impossible to turn out the volume of
work that comes from engineering offices. And, after noting
tragic results of standardization used without discrimination
or control, he balanced the picture by saying, The important
point is that some types of planning, designing, and experi-
menting can be put on an assembly line and some types can
be put on an assembly line of skilled brains only, but much of
the most important work cannot be done by using fixed rules,
standardized formulas, or rigid methods.
Standards, therefore, are essential but they are not every-
thing. Over the years the AISC specifications have been more
discriminating than any of the other standards I know of in
providing for the everyday problems that can be reduced to
simple routines and those that may benefit from special
attention, and in stopping short of the line between the routine
and the creative sides of engineering. I think credit should go
to the mix of steel men, consulting engineers, and academi-
cians on its Specification Committee, and the checks and
balances they exert on each other. George Winter was too
level-headed to do so, but I can imagine another academic of
his time proposing adoption of the effective length concept in
a way that would bring Ted Higgins down on him to make
certain it didnt require every designer to calculate eigenval-
ues, an impractical task in the 1960s.
But Cross also had the right thing to say about changing
times: Old techniques must be changed and often aban-
doned, new techniques developed. Development and ad-
vancement are largely dependent upon research which, by
necessity, deals with controlled study of small isolated details.
There is usually a long period before such details can be
assembled into generalizations. Many try to seize upon these
details before they have been digested and apply them at once.
What are supposed to be results of investigations are often
incorporated in specifications and codes before the investiga-
tion itself has been completed, much less digested.
Again the effective length concept is a useful example.
Some years ago I wrote a book that contains many pages on
effective lengths and I stand by what I said then, so I dont
think I can be labeled an enemy of the K factor. But at
bottom it is faulty; its based on the impossible notion of an
ideal structure. As an essential for general design it has to go
eventually.
Right now, second order elastic analyses programs that
eliminate the need to calculate B
1
and B
2
factors and their
associated effective length coefficients are available. I wish
more engineers would use them. One of my reasons for
getting into computer aided engineering research 15 years ago
was my belief that practical nonlinear analysis methods can
be developed that will make obsolete the need to rely on Ks
for estimating effects of member interaction. I expected them
to be in common use by this time. But now I feel like the man
who conceived of the humanoid thinking machine HAL in his
movie 2001. He said recently the only error he made was
that he didnt call the movie 2101.
But it must also be acknowledged that there are places
where effective lengths are still the best, or only, practical
expedient for routine design. This is the motivation for much
of the present research in inelastic analysis: the hope of
further reducing dependence on factors such as these which,
if not calculated in some sensible way, can be grossly mis-
leading.
Thus in this respect I have conflicting emotions:
On the one hand I am bothered by the slow pace of change.
One of the legacies of the exceptional work of earlier times
is that old notions have become so embedded in our thinking
and our activitiesin evaluation of structural alternatives,
teaching of steel design, research directions, design office
software, etc.that change has become difficult. We see this
in the slowness of the adoption of LRFD. I see it also in the
research directed toward applying to design the advances in
analysis made possible by the computer. In their lingering
utility we tend to overlook the fact that the introduction of
effective lengths and other contributions of the 1950s and
60s were not intended to put an end to progress. Witness
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 166
Winters emphasis on simple improvements and mini-
mum changes to customary procedures.
On the other hand I see the present as a period of assimila-
tion of uncustomary ideas and breathing time during which
investigations that will advance computer use can be com-
pleted, assembled into generalizations, and incorporated in
the standards that are essential to their use in practice.
THE AISC LRFD SPECIFICATION
The AISC LRFD Specification is a key link in relating this
research to practice, and it should remain so after limit states
design becomes the norm and as long as research related to
the use of computers in design reaches some new, useful
stage. In preparation for impending developments, I would
urge special attention to four areas:
Connections. Expansion of present provisions for partially
restrained connections to facilitate inclusion of their proper-
ties in system analysis.
System Reliability. The future will take engineers closer to the
point at which they can analyze and proportion structures as
true systems. Present resistance factors are based largely on
studies of isolated elements or very small assemblages. One
wonders what relevance they have to the resistance of systems
of any size. Resistance factors based on the reliability of
sizeable systems are needed.
Analysis. Analysis has always been a coequal partner with
design in determining the proportions of a structure. But
before 1963 the word analysis didnt even appear in the
AISC Specification. This may have been appropriate in pre-
computer days, when any analysis other than a clearly ap-
proximate scheme was generally impossible. But the com-
puter has changed that. Analysis is still much of an art, but
there is now a hierarchy of analytical methods and some
established features of analysis that deserve a chapter in
specifications.
Serviceability Requirements. The requirements for service-
ability are only loosely defined in the present LRFD specifi-
cation and not tied to a particular method of analysis. These,
too, deserve more attention than they now receive.
Each of these items is the subject of active research. Indeed,
the last four Higgins LecturesMurrays, Berteros, Gerstle
and Ackroyds, and Ellingwoodsdealt directly or indi-
rectly with one or more of them. But each requires further
study and, in the end, the consensus of the Specification
Committee. Most also involve judgment as to how far the
Specification should go. When is it in danger of leaving the
routine and invading or even preempting the creative side
of engineering?
CONDITIONS OF PRACTICE
The extent to which an engineering organization should em-
brace computerized technology is a decision that can only be
made after weighing all the business and technical factors that
affect its operation. An outsider, particularly a non-practi-
tioner, is in no position to offer general advice. But my subject
of the use and misuse of new technology makes a few com-
ments on the technological factors unavoidable.
To make a point Ill use a simplified picture: that there are
just two types of practice: 1) the large A & E or multidiscipli-
nary engineering organization; and 2) the small structural
engineering office. My experience has been that the same
levels of creativity, intelligence, and expertise can be found
in each and both can produce structures of high quality. But
Ill assume that the large organization has resources of capital
and manpower the small one doesnt have.
In this imaginary world, I would have little sympathy for
the large organization that didnt keep abreast of, and take
advantage of, the latest advances in technology. This would
mean, for example, adopting the AISC LRFD Specification
wholeheartedly, and having the latest in computer hardware
and computer aided engineering software. It would also mean
the continuing education and training of its engineers in the
use of the new technology and having a staff to advise and
assist in its use and to maintain it. The possibility of producing
a more finally engineered, more reliable product should be all
the motivation the large, adequately endowed organization
would need to adopt such policies.
I would, however, have understanding for the small prac-
titioner who tries to keep abreast of change but finds the
present pace too fast for the constraints on his time and money.
Such a person should have no difficulty in making the transi-
tion from the concepts of ASD to those of LRFD. But con-
tinually upgrading computer hardware and software as new
models and versions are announced could be impossible. It
seems to me the only response to such constraints would be
to accept them and to continue a practice based on the
conscientious application of the principles and methods mas-
tered by the talent at hand. Im an obvious believer in the
possibilities of computer aided engineering, but a position
that the newest program or machine is essential to the produc-
tion of a fine structure would be fatuous, as any glance at
history will show.
CHANGING TIMES
Strange things have happened to the image and maybe even
the substance of engineering over the years. In looking to the
future it is worth considering the change.
The Nineteenth Century
One hundred years ago Robert Louis Stevenson gave a view
of nineteenth century civil engineering in an account of the
work of his grandfather, Robert Stevenson, a pioneering civil
engineer:
14
He was above all things a projector of works in the face
of nature, and a modifier of nature itself. A road to be made,
a tower to be built, a harbour to be constructedthese were
FOURTH QUARTER / 1992 167
problems with which his mind was continually occupied, and
for these and similar ends he traveled the world for more than
half a century, like an artist, notebook in hand.
I find him writing; and in truth what an engineer most
properly deals with is that which can be measured, weighed,
and numbered. These are his conquests, with which he must
continuously furnish his mind, and which, after he has ac-
quired them, he must continually apply and exercise.
These are the certainties of the engineer; so far he finds a
solid footing and clear views. But the province of formulas
and constants is restricted. With the civil engineer, the
obligation starts with the beginning. He is always the practical
man. He has to deal with the unpredictable, with those
forces that are subject to no calculation; and still he must
predict, still calculate them, at his peril. His work is not yet
in being, and he must foresee its influence.
It is plain there is here but a restricted use of formulas. In
this sort of practice, the engineer has need of some transcen-
dental sense. The rules must be everywhere indeed; but
they must be modified by this transcendental coefficient,
everywhere bent to the impression of the trained eye and the
feelings of the engineer.
The Twentieth Century
In a current book, the social critic Neil Postman argues that
cultures can be classified into three types: tool-using (like
Europe in the Middle Ages); technocracies (like nineteenth
century England) which regard science as a means of achiev-
ing progress and improving the human condition; and Tech-
nopolies or totalitarian technocracies which subordinate all
forms of human life to the sovereignty of technique and
technology and create a culture without a moral foun-
dation.
15
He views late twentieth century America as a
Technopoly.
In outlining the premises of a Technopoly, Postman cites
notions of scientific management which include the beliefs
that the primary, if not the only, goal of human labor and
thought is efficiency; that technical calculation is in all re-
spects superior to human judgment; that in fact human judg-
ment cannot be trusted because it is plagued by laxity, ambi-
guity, and unnecessary complexity; that subjectivity is an
obstacle to clear thinking; that what cannot be measured
either does not exist or is of no value; and that the affairs of
citizens are best guided and conducted by experts. In fairness
it should be noted that Postman is not speaking only, or even
primarily, to engineers. But if there is any truth in his analysis
of a condition and its causes, engineers are among the guilty.
The Future
I believe that most of todays engineers would agree that, even
after a hundred years, Stevensons picture of engineering as
an enterprise that requires human understanding and judg-
ment is still closer to the mark than Postmans opinion of it
as a mechanical, culture destroying process. I, for one, would
like to see it remain so. One of the main objectives of the
Cornell research I mentioned has been to demonstrate ways
in which the engineer can retain control over the application
of advanced methods of analysis and design. My hope, there-
fore, is that my comments may stimulate some thought, and
maybe even some action, on directions in research, education,
and practice that can help keep it this way while assimilating
tomorrows technology.
ACKNOWLEDGMENTS
I would like to acknowledge the contributions of my col-
leagues in the course of our research: R. H. Gallagher, J. F.
Abel, and G. G. Deierlein, and the financial support of the
National Science Foundation and the American Institute of
Steel Construction. Above all, I owe a profound debt of
gratitude to many graduate students: J. L. Gross, T. A. Mutryn,
C. I. Pesquera, M. Gattass, J. G. Orbison, Y. B. Yang, S. I.
Hilmy, K. N. Loo, J. L. Castener, S. N. Sutharshana, D. W.
White, J. F. Hajjar, and R. D. Ziemian.
REFERENCES
1. Manual of Steel Construction, American Institute of Steel
Construction, Sixth Ed., AISC, New York, 1963.
2. Manual of Steel ConstructionLoad and Resistance Fac-
tor Design, First Ed., AISC, Chicago, 1986.
3. Winter, G., Compression Members in Trusses and
Frames, presented at the Annual Meeting, Column Re-
search Council, May 28, 1954.
4. McGuire, W., Research and Practice in Computer-Aided
Structural Engineering, A. J. Boase Lecture in Civil
Engineering, University of Colorado, Boulder, March 22,
1988.
5. Technical Overviews: MicasPlus Analysis, MicasPlus
Design, and MicasPlus ModelDraft, the Intergraph Cor-
poration, Huntsville, AL, 1989.
6. Martini, K., Amin, N., Lee, P. L., and Bonowitz, D., The
Potential Role of Non-Linear Analysis in the Seismic
Design of Building Structures, Proceedings of Fourth
U.S. National Conference on Earthquake Engineering,
Palm Springs, CA, May 1990.
7. Rosenbaum, D. B., Training Critical in Use of Structural
Software, Engineering NewsRecord, New York, October
28, 1991.
8. Blodgett, Omer, Weld Failures: They Could Be the Re-
sult of Violating Simple Design Principles, The Welding
Journal, American Welding Society, Miami, March and
April 1982.
9. Ackroyd, M. H., Fenves, S. J., and McGuire, W., Com-
puterized LRFD Specification, Proceedings, National
Steel Construction Conference, AISC, Miami, 1988.
10. McGuire, W., Refining the Plastic Hinge Concept, Pro-
ceedings, Annual Technical Session, SSRC, Chicago,
1991.
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 168
11. Research Spending Is Declining in U.S. As It Rises
Abroad, New York Times, New York, February 21, 1992.
12. McGuire, W., Structural Engineering for the 80s and
Beyond, Engineering Journal, AISC, Chicago, Second
Quarter, 1984.
13. Cross, H., Engineers and Ivory Towers, McGraw-Hill,
New York, 1952.
14. Records of a Family of Engineers, The Works of Robert
Louis Stevenson, Vol. XVIII, The Edinborough Edition,
1896.
15. Postman, Neil, Technopoly, The Surrender of Culture to
Technology, A. A. Knopf, New York, 1992.
FOURTH QUARTER / 1992 169
ANCHOR BOLTS
Design Aid: Anchor Bolt Interaction of Shear and
Tension Loads Scacco, Mario N. . . . . . . . . . . . 137
High-Strength Bolts for Bridges Verma, Krishna K.
Fred R. Beckman . . . . . . . . . . . . . . . . . . . . . . . . . . 4
BEAMS
Flexural Strength of WT Sections Ellifritt,
Duane S., Gregory Wine, Thomas Sputo,
and Santosh Samuel. . . . . . . . . . . . . . . . . . . . . . . . 67
The Significance and Application of C
b
in Beam
Design Zuraski, Patrick D. . . . . . . . . . . . . . . . . 20
BRACING
Forces on Bracing Systems Nair, R. Shankar. . . . 45
BRIDGES
High-Strength Bolts for Bridges Verma, Krishna K.
Fred R. Beckman . . . . . . . . . . . . . . . . . . . . . . . . . . 4
BUCKLING
An Equivalent Radius of Gyration Approach
to Flexural-Torsional Buckling for Singly
Symmetric Sections Bakos, Jack D. Jr.
and James A. OLeary . . . . . . . . . . . . . . . . . . . . . . 26
BUILT-UP MEMBERS
Analytical Criteria for Stitch Strength of Built-up
Compression Members Aslani, Farhang and
Subhash C. Goel . . . . . . . . . . . . . . . . . . . . . . . . . . 102
COLUMNS
A Novel Approach for K Factor Determination
Lui, Eric M. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
Simple Equations for Effective Length Factors
Dumonteil, Pierre . . . . . . . . . . . . . . . . . . . . . . . . . 111
COMPUTERS
Computers and Steel Design McGuire, W. . . . . . . 160
CONNECTIONS
An Experimental Study of Block Shear Failure of
Angles in Tension Epstein, Howard I. . . . . . . . 75
Fast Check for Block Shear Burgett, Lewis B. . . . 125
Reliability of Rotational Behavior of Framing
Connections Rauscher, Thomas R. and Kurt H.
Gerstle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Strength and Serviceability of Hanger Connections
Thornton, W. A. . . . . . . . . . . . . . . . . . . . . . . . . . 145
Structural Details To Increase Ductility of
Connections Blodgett, Omer W. . . . . . . . . . . . . 132
ERECTION
Distortion-Induced Cracking During Transit
Roddis, W. M. Kim . . . . . . . . . . . . . . . . . . . . . . . . . 85
FRAMES
A Method for Incorporating Live Load Reduction
Provisions in Frame Analysis Ziemian,
Ronald D. and William McGuire . . . . . . . . . . . . . . 1
LOAD AND RESISTANCE FACTOR DESIGN
Load and Resistance Factor Design of Welded Box
Section Trusses Packer, Jeffrey A., J. E. (Ted)
Henderson, and Jaap Wardenier . . . . . . . . . . . . . . 92
SINGLE-ANGLE
Eccentrically Loaded Steel Single Angle Struts
Adluri, Seshu Madhavarao and Murty
K. S. Madugula. . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Non-Slender Single Angle Struts Elgaaly, M.,
W. Davids, and H. Dagher . . . . . . . . . . . . . . . . . . . 49
TUBULAR SECTIONS
Load and Resistance Factor Design of Welded Box
Section Trusses Packer, Jeffrey A., J. E. (Ted)
Henderson, and Jaap Wardenier . . . . . . . . . . . . . . 92
VIBRATION
Application of Tuned Mass Dampers To Control
Vibrations of Composite Floor Systems
Webster, Anthony C. and Rimas Vaicaitis . . . . . . . 116
Design Chart for Vibration of Office and Residential
Floors Hatfield, Frank J.. . . . . . . . . . . . . . . . . . 141
Annual Index
First Quarter 147 Third Quarter 85124
Second Quarter 4984 Fourth Quarter 125171
SUBJECT INDEX
ENGINEERING JOURNAL / AMERICAN INSTITUTE OF STEEL CONSTRUCTION 170
AUTHOR INDEX
Adluri, Seshu Madhavarao and Murty K. S. Madugula
Eccentrically Loaded Steel Single Angle Struts . . . . 59
Aslani, Farhang and Subhash C. Goel
Analytical Criteria for Stitch Strength of Built-up
Compression Members . . . . . . . . . . . . . . . . . . . . . 102
Bakos, Jack D. and James A. OLeary
An Equivalent Radius of Gyration Approach to
Flexural-Torsional Buckling for Singly
Symmetric Sections . . . . . . . . . . . . . . . . . . . . . . . . 26
Beckman, Fred R.
See Verma, Krishna K. . . . . . . . . . . . . . . . . . . . . . . . . 4
Blodgett, Omer W.
Structural Details To Increase Ductility of
Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
Burgett, Lewis B.
Fast Check for Block Shear . . . . . . . . . . . . . . . . . . . . 125
Dagher, H.
See Elgaaly, M. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Davids, W.
See Elgaaly, M. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Dumonteil, Pierre
Simple Equations for Effective Length Factors . . . . 111
Elgaaly, M., W. Davids, and H. Dagher
Non-Slender Single Angle Struts. . . . . . . . . . . . . . . . 49
Ellifritt, Duane S., Gregory Wine, Thomas Sputo, and
Santosh Samuel
Flexural Strength of WT Sections . . . . . . . . . . . . . . . 67
Epstein, Howard I.
An Experimental Study of Block Shear Failure of
Angles in Tension . . . . . . . . . . . . . . . . . . . . . . . . . 75
Gerstle, Kurt H.
See Rauscher, Thomas R.. . . . . . . . . . . . . . . . . . . . . . 12
Goel, Subhash
See Aslani, Farhang . . . . . . . . . . . . . . . . . . . . . . . . . . 102
Hatfield, Frank J.
Design Chart for Vibration of Office and Residential
Floors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141
Henderson, J. E. (Ted)
See Packer, Jeffrey A. . . . . . . . . . . . . . . . . . . . . . . . . 92
Lui, Eric M.
A Novel Approach for K Factor Determination . . . . 150
Madugula, Murty K. S.
See Adluri, Seshu. . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
McGuire, W.
Computers and Steel Design . . . . . . . . . . . . . . . . . . . 160
McGuire, William
See Ziemian, Ronald D. . . . . . . . . . . . . . . . . . . . . . . . 1
Nair, R. Shankar
Forces on Bracing Systems . . . . . . . . . . . . . . . . . . . . 45
OLeary, James A.
See Bakos, Jack D. . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Packer, Jeffrey A., J. E. (Ted) Henderson, and Jaap
Wardenier
Load and Resistance Factor Design of Welded Box
Section Trusses. . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Rauscher, Thomas R. and Kurt H. Gerstle
Reliability of Rotational Behavior of Framing
Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Roddis, W. M. Kim
Distortion-Induced Cracking During Transit. . . . . . . 85
Samuel, Santosh
See Ellifritt, Duane S.. . . . . . . . . . . . . . . . . . . . . . . . . 67
Scacco, Mario N.
Design Aid: Anchor Bolt Interaction of Shear and
Tension Loads . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
Sputo, Thomas
See Ellifritt, Duane S.. . . . . . . . . . . . . . . . . . . . . . . . . 67
Thornton, W. A.
Strength and Serviceability of Hanger
Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Vaicaitis, Rimas
See Webster, Anthony C. . . . . . . . . . . . . . . . . . . . . . . 116
Verma, Krishna K. and Fred R. Beckman
High-Strength Bolts for Bridges . . . . . . . . . . . . . . . . 4
Wardenier, Jaap
See Packer, Jeffrey A.. . . . . . . . . . . . . . . . . . . . . . . . . 92
Webster, Anthony C. and Rimas Vaicaitis
Application of Tuned Mass Dampers To Control
Vibrations of Composite Floor Systems . . . . . . . . 116
Wine, Gregory
See Ellifritt, Duane S.. . . . . . . . . . . . . . . . . . . . . . . . . 67
Ziemian, Ronald D. and William McGuire
A Method for Incorporating Live Load Reduction
Provisions in Frame Analysis. . . . . . . . . . . . . . . . . 1
Zuraski, Patrick D.
The Significance and Application of C
b
in Beam
Design. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
FOURTH QUARTER / 1992 171
Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Labour Productivity Chart in UaeDocumento9 páginasLabour Productivity Chart in UaeAbraham Alex91% (32)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- JCB Online Interface Guide (2019)Documento87 páginasJCB Online Interface Guide (2019)mitxael83Ainda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- WORK ITEM PRODUCTIVITY RATESDocumento85 páginasWORK ITEM PRODUCTIVITY RATESShiham Sherifdeen89% (18)
- C1581 PDFDocumento6 páginasC1581 PDFAnthony López HuamanAinda não há avaliações
- Designers' Guide To en 1994-2 - Eurocode 4 - Design of Composite Steel and Concrete StructuresDocumento449 páginasDesigners' Guide To en 1994-2 - Eurocode 4 - Design of Composite Steel and Concrete StructuresRosen Petrov Petrov100% (5)
- AASHTO Sets Transportation StandardsDocumento3 páginasAASHTO Sets Transportation StandardsAndrea CastreAinda não há avaliações
- Gigabyte GA-Z270-Gaming-K3 Rev 1.02 BoardView PDFDocumento3 páginasGigabyte GA-Z270-Gaming-K3 Rev 1.02 BoardView PDFsraft2000Ainda não há avaliações
- Acc We Gb000a Fire Safety BTHDocumento12 páginasAcc We Gb000a Fire Safety BTHtienlamAinda não há avaliações
- ISO 19100 Geographic Information StandardsDocumento12 páginasISO 19100 Geographic Information StandardsHermenegildo LuisAinda não há avaliações
- Fundamentals of Transportation: PDF Generated At: Wed, 10 Nov 2010 00:16:57 UTCDocumento194 páginasFundamentals of Transportation: PDF Generated At: Wed, 10 Nov 2010 00:16:57 UTCshrwncmAinda não há avaliações
- Abnormal Transport Guidelines enDocumento61 páginasAbnormal Transport Guidelines enshrwncmAinda não há avaliações
- Sample Pickup and InstallDocumento1 páginaSample Pickup and InstallshrwncmAinda não há avaliações
- Lifting & Rigging Study: Tackle CalculationDocumento1 páginaLifting & Rigging Study: Tackle CalculationshrwncmAinda não há avaliações
- Lift Plan DrawingDocumento1 páginaLift Plan DrawingshrwncmAinda não há avaliações
- Material Takeoff SummaryDocumento1 páginaMaterial Takeoff SummaryshrwncmAinda não há avaliações
- Sample CalcualtionDocumento3 páginasSample CalcualtionshrwncmAinda não há avaliações
- Sample Lifting LugDocumento1 páginaSample Lifting LugshrwncmAinda não há avaliações
- Lifting & Rigging Study: Tackle CalculationDocumento1 páginaLifting & Rigging Study: Tackle CalculationshrwncmAinda não há avaliações
- Load RadiusDocumento1 páginaLoad RadiusshrwncmAinda não há avaliações
- Foundation DesignDocumento6 páginasFoundation DesignshrwncmAinda não há avaliações
- Critical Lift Plan: Mobile CraneDocumento1 páginaCritical Lift Plan: Mobile CraneshrwncmAinda não há avaliações
- Sample Foundation MTO CalcDocumento1 páginaSample Foundation MTO CalcshrwncmAinda não há avaliações
- Sample Foundation MTO CalcDocumento1 páginaSample Foundation MTO CalcshrwncmAinda não há avaliações
- Sample Foundation MTO CalcDocumento1 páginaSample Foundation MTO CalcshrwncmAinda não há avaliações
- Sample Manpower LoadDocumento2 páginasSample Manpower LoadshrwncmAinda não há avaliações
- Columns Subject To Load With Large EccentricityDocumento1 páginaColumns Subject To Load With Large EccentricityshrwncmAinda não há avaliações
- Classification of Short Column Per ACIDocumento1 páginaClassification of Short Column Per ACIshrwncmAinda não há avaliações
- Effective Length - Concrete ColumnDocumento3 páginasEffective Length - Concrete ColumnshrwncmAinda não há avaliações
- Part of NSCP 2015 T304-1 Allowable Foundation PressureDocumento1 páginaPart of NSCP 2015 T304-1 Allowable Foundation PressureshrwncmAinda não há avaliações
- Signage SampleDocumento1 páginaSignage SampleshrwncmAinda não há avaliações
- Load Comb ASCEDocumento1 páginaLoad Comb ASCEshrwncmAinda não há avaliações
- Prayer To Holy TrinityDocumento1 páginaPrayer To Holy TrinityshrwncmAinda não há avaliações
- Saeoc CBFDocumento1 páginaSaeoc CBFshrwncmAinda não há avaliações
- 1 Ladder/Manhole Access DesignDocumento6 páginas1 Ladder/Manhole Access DesignGanesh AdityaAinda não há avaliações
- Prayer To Holy TrinityDocumento1 páginaPrayer To Holy TrinityshrwncmAinda não há avaliações
- Is 202 Pipe StiffnessDocumento4 páginasIs 202 Pipe StiffnessshrwncmAinda não há avaliações
- Saeoc CBFDocumento1 páginaSaeoc CBFshrwncmAinda não há avaliações
- Public Review Draft 2404Documento115 páginasPublic Review Draft 2404Said100% (1)
- Technology Brief: RAID LevelsDocumento5 páginasTechnology Brief: RAID LevelsNavanathAinda não há avaliações
- ABB Power Tap-Changer GuideDocumento13 páginasABB Power Tap-Changer GuideSellappan MuthusamyAinda não há avaliações
- 8.1.4.7 Packet Tracer - Subnetting Scenario 1 PDFDocumento4 páginas8.1.4.7 Packet Tracer - Subnetting Scenario 1 PDFSyammirul RashidAinda não há avaliações
- Uclinux Course Day 1Documento12 páginasUclinux Course Day 1sarathkumar3389Ainda não há avaliações
- Vtu Tea-1 J2EE Notes Ch-3Documento17 páginasVtu Tea-1 J2EE Notes Ch-3junaidnizAinda não há avaliações
- Repeater Installation and CommissioningDocumento34 páginasRepeater Installation and CommissioningTuan TocdaiAinda não há avaliações
- Sign SystemDocumento50 páginasSign SystemluismpgluismpgAinda não há avaliações
- Project Risk: Group 1Documento20 páginasProject Risk: Group 1Group 8Ainda não há avaliações
- Low Bit Rate Speech CodingDocumento3 páginasLow Bit Rate Speech CodingBhargava BluecoolAinda não há avaliações
- Siebel 8.1.x Integration Ed 1 (Student Guide - Volume 2)Documento266 páginasSiebel 8.1.x Integration Ed 1 (Student Guide - Volume 2)Felipe Antonio Vásquez CastañedaAinda não há avaliações
- British Standards BS EN 50290-2-23-2013Documento14 páginasBritish Standards BS EN 50290-2-23-2013rofe100% (3)
- NyproDocumento13 páginasNyproShilpee Haldar MishraAinda não há avaliações
- Ult REL Output Analog Modules 1734-In002 enDocumento24 páginasUlt REL Output Analog Modules 1734-In002 enGabriel Constantin NastaseAinda não há avaliações
- WT Lab ManualDocumento44 páginasWT Lab ManualVenkatanagasudheer Thummapudi100% (1)
- Parliamentary Procedure in A MeetingDocumento2 páginasParliamentary Procedure in A MeetingGiordann MadejaAinda não há avaliações
- GRI 2808-12V Data SheetDocumento5 páginasGRI 2808-12V Data SheetJMAC SupplyAinda não há avaliações
- Types of Forging ProcessesDocumento9 páginasTypes of Forging ProcessesAryan Singh100% (1)
- Industrial Series BrochureDocumento16 páginasIndustrial Series BrochureLitarmjAinda não há avaliações
- VHDL Introduction by J BhaskerDocumento4 páginasVHDL Introduction by J BhaskerVishi Agrawal0% (1)
- Satellite Multiswitch: Instructions For UseDocumento8 páginasSatellite Multiswitch: Instructions For Usekiario2Ainda não há avaliações
- en Operating Instructions VEGABAR 28 Two Wire 4 20 MADocumento56 páginasen Operating Instructions VEGABAR 28 Two Wire 4 20 MAVegard SømliøyAinda não há avaliações
- European Standard Norme Europeenne Europaische Norm: Ultrasonic Testing of $teel BarsDocumento13 páginasEuropean Standard Norme Europeenne Europaische Norm: Ultrasonic Testing of $teel BarspraveenAinda não há avaliações