Você também pode gostar
- Open-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsNo EverandOpen-Source Robotics and Process Control Cookbook: Designing and Building Robust, Dependable Real-time SystemsNota: 3 de 5 estrelas3/5 (1)
- Embedded Systems 6. Real-Time Operating Systems: Lothar ThieleDocumento27 páginasEmbedded Systems 6. Real-Time Operating Systems: Lothar ThieleRama GopalAinda não há avaliações
- Using Real-Time Java For Industrial Robot ControlDocumento7 páginasUsing Real-Time Java For Industrial Robot ControlFederico RoccabiancaAinda não há avaliações
- Introduction To Embedded System Design: © Lothar Thiele ETH Zurich, SwitzerlandDocumento51 páginasIntroduction To Embedded System Design: © Lothar Thiele ETH Zurich, SwitzerlandBhawana DangwalAinda não há avaliações
- Real-Time Operating Systems: Dayang Norhayati Abang JawawiDocumento21 páginasReal-Time Operating Systems: Dayang Norhayati Abang JawawiJonny MestamiaAinda não há avaliações
- Lecture - 07 - Embedded Systems IntroductionDocumento8 páginasLecture - 07 - Embedded Systems IntroductionTú Phạm AnhAinda não há avaliações
- Real Time Linux SlideDocumento12 páginasReal Time Linux SlideSimmi JoshiAinda não há avaliações
- Vxworks Rtos: Embedded Systems-AssignmentDocumento6 páginasVxworks Rtos: Embedded Systems-AssignmentPrashanth KumarAinda não há avaliações
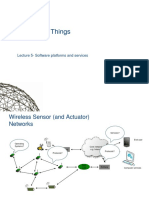
- Week 9 - Software Plateforms and ServcesDocumento50 páginasWeek 9 - Software Plateforms and Servcesmr nAinda não há avaliações
- Eis Iiits Module 1Documento103 páginasEis Iiits Module 1Vaziel IvansAinda não há avaliações
- Embedded System (9168)Documento5 páginasEmbedded System (9168)Victoria FrancoAinda não há avaliações
- Performance Comparison of VxWorks Linux RTAI and Xenomai in A Hard Real-Time ApplicationDocumento5 páginasPerformance Comparison of VxWorks Linux RTAI and Xenomai in A Hard Real-Time ApplicationsatyanaryanakAinda não há avaliações
- Real Time Linux SlideDocumento13 páginasReal Time Linux SlideTzarSkbAinda não há avaliações
- Internet of Things: Lecture 5-Software Platforms and ServicesDocumento50 páginasInternet of Things: Lecture 5-Software Platforms and ServicesPartha ParidaAinda não há avaliações
- Lecture 2 (Parallelism)Documento7 páginasLecture 2 (Parallelism)hussiandavid26Ainda não há avaliações
- 10 Embedded SystemsDocumento74 páginas10 Embedded SystemsFarumaAinda não há avaliações
- VX WORKSDocumento3 páginasVX WORKSRakesh SKAinda não há avaliações
- FALLSEM2020-21 CSE3009 ETH VL2020210105498 Reference Material I 05-Sep-2020 M4 - Contiki Cooja.Documento76 páginasFALLSEM2020-21 CSE3009 ETH VL2020210105498 Reference Material I 05-Sep-2020 M4 - Contiki Cooja.ayushthegreat123Ainda não há avaliações
- 5 OperatingSystemDocumento41 páginas5 OperatingSystemThanh Võ Thị HoàiAinda não há avaliações
- Course FileDocumento36 páginasCourse FileElakkiya N.SAinda não há avaliações
- 5 2marksDocumento22 páginas5 2marksElakkiya N.SAinda não há avaliações
- Dr. B.R. Ambedkar National Institute of Technology: Computer Networks CSX-321Documento34 páginasDr. B.R. Ambedkar National Institute of Technology: Computer Networks CSX-321Gaurav SachdevaAinda não há avaliações
- BY Arun Kumar D: 1MV06MCA07Documento18 páginasBY Arun Kumar D: 1MV06MCA07crazyladduAinda não há avaliações
- Chapter-7 Designed Methodologies and Tools: Design Flow: Sequence of Steps in A Design MethodologyDocumento16 páginasChapter-7 Designed Methodologies and Tools: Design Flow: Sequence of Steps in A Design MethodologyElias YeshanawAinda não há avaliações
- Programming The Microcontroller For Iot: Cse 3009 Internet of Things - Fall 20-21Documento76 páginasProgramming The Microcontroller For Iot: Cse 3009 Internet of Things - Fall 20-21ayushthegreat123Ainda não há avaliações
- Embedded System QBDocumento20 páginasEmbedded System QBVIGNESH L RAinda não há avaliações
- What's The Difference Between Ethernet Types?Documento4 páginasWhat's The Difference Between Ethernet Types?leonardo_melo_costaAinda não há avaliações
- Real Time Operating SystemDocumento5 páginasReal Time Operating SystemChethan JayasimhaAinda não há avaliações
- Mrs. Hazel B. France Mrs. Hazel B. France IT Department IT DepartmentDocumento75 páginasMrs. Hazel B. France Mrs. Hazel B. France IT Department IT DepartmentHazel Mjkristell Basallote FranceAinda não há avaliações
- Control Application Development in pSOSDocumento6 páginasControl Application Development in pSOSS Bharadwaj ReddyAinda não há avaliações
- Final ES PDFDocumento176 páginasFinal ES PDFFarida ShaikAinda não há avaliações
- Dunkels - Contiki OSDocumento8 páginasDunkels - Contiki OSFogusAinda não há avaliações
- Real Time Operating SystemsDocumento44 páginasReal Time Operating SystemsAnand PatraAinda não há avaliações
- Taking The Guesswork Out of TimingDocumento4 páginasTaking The Guesswork Out of TimingXMOSAinda não há avaliações
- EEEM048-Internet of Things: Wireless Sensor (And Actuator) NetworksDocumento28 páginasEEEM048-Internet of Things: Wireless Sensor (And Actuator) NetworksCyber CityAinda não há avaliações
- Embedded System - Word FileDocumento5 páginasEmbedded System - Word FileJalpa DesaiAinda não há avaliações
- N410 Documentation 2Documento63 páginasN410 Documentation 2brunettemasheleAinda não há avaliações
- RTOS ConceptsDocumento29 páginasRTOS Conceptsshirish jadhav91% (11)
- RtosDocumento42 páginasRtospipul36Ainda não há avaliações
- Unit 2 - Hardware and SoftwareDocumento18 páginasUnit 2 - Hardware and SoftwareCLARA D SOUZA THOMASAinda não há avaliações
- 4 ProgrammingParadigmsDocumento48 páginas4 ProgrammingParadigmsThanh Võ Thị HoàiAinda não há avaliações
- Rtos Avr V3i1 Ijertv3is10873Documento4 páginasRtos Avr V3i1 Ijertv3is10873Michael WaldenAinda não há avaliações
- Gujarat Technological UniversityDocumento4 páginasGujarat Technological UniversityArunmetha SundaramoorthyAinda não há avaliações
- Week5 IoT SoftwareDocumento37 páginasWeek5 IoT SoftwareHector TiboAinda não há avaliações
- Real-Time Operating System NewDocumento18 páginasReal-Time Operating System NewJonathan JohnsonAinda não há avaliações
- Embedded Systems: MBA - Tech. - EXTC Sem Vii AY 2022-2023Documento90 páginasEmbedded Systems: MBA - Tech. - EXTC Sem Vii AY 2022-2023Aakarsh KumarAinda não há avaliações
- TP Embedded OS CH1Documento12 páginasTP Embedded OS CH1SOLTANI MehdiAinda não há avaliações
- Erts Unit IIIDocumento30 páginasErts Unit IIIsenthilkumarAinda não há avaliações
- Realtime Operating Systems For Embedded ComputingDocumento5 páginasRealtime Operating Systems For Embedded ComputingRishabh DesaiAinda não há avaliações
- The Performance of Openfoam in Beowulf Clusters: Ying Wei Feng ShaDocumento3 páginasThe Performance of Openfoam in Beowulf Clusters: Ying Wei Feng ShasagarsrinivasAinda não há avaliações
- EE6602 UwDocumento79 páginasEE6602 UwAlex Neo XanderAinda não há avaliações
- Unit-Iv: Real Time Operating SystemDocumento55 páginasUnit-Iv: Real Time Operating SystemarunmethaAinda não há avaliações
- Woot KoscherDocumento10 páginasWoot KoscherEva ZemlyaAinda não há avaliações
- Concept of Real Time OSDocumento29 páginasConcept of Real Time OSVignesh waranAinda não há avaliações
- Session Title: Bob Johnston / IPS Grid & HA SolutionsDocumento31 páginasSession Title: Bob Johnston / IPS Grid & HA Solutionsnirmal_itAinda não há avaliações
- Lecture 3 Classification of Embedded SystemsDocumento22 páginasLecture 3 Classification of Embedded SystemsSaikrishnaAinda não há avaliações
- ESD NotesDocumento141 páginasESD Notes0442- TARUNAinda não há avaliações