Você também pode gostar
- EV Class NotesDocumento30 páginasEV Class NotesVinod BabaleshwarAinda não há avaliações
- Calculation of Torque For Selection of MotorDocumento6 páginasCalculation of Torque For Selection of Motoratanughosh125100% (6)
- Synchro Appl GuideDocumento5 páginasSynchro Appl GuideAlexandre Anderson AlvesAinda não há avaliações
- Induction MotorDocumento39 páginasInduction MotorAhmed MagdyAinda não há avaliações
- Mathematical Modelling of Electromechanical Systems PPT PSDDocumento8 páginasMathematical Modelling of Electromechanical Systems PPT PSDNoviaAinda não há avaliações
- DTrends Feb 2011Documento14 páginasDTrends Feb 2011Rui AllenAinda não há avaliações
- Ac DrivesDocumento36 páginasAc DrivesSeshagirirao GalamAinda não há avaliações
- The Induction Motor: A Detailed Look at Its Operation and CharacteristicsDocumento13 páginasThe Induction Motor: A Detailed Look at Its Operation and CharacteristicsAsimAinda não há avaliações
- Caculate Rotary LinearDocumento3 páginasCaculate Rotary LinearTrinh Luong MienAinda não há avaliações
- AC Machine Stator Phases and Induction Motor Rotating Magnetic FieldDocumento39 páginasAC Machine Stator Phases and Induction Motor Rotating Magnetic FieldSaneer M SaliAinda não há avaliações
- Dynamometers 161011144109Documento28 páginasDynamometers 161011144109Mr.S UpenderAinda não há avaliações
- Motor Selection, Inertia PDFDocumento6 páginasMotor Selection, Inertia PDFIswar Rauf Aboo 'AqilahAinda não há avaliações
- Speed Control of DC Servo Motor Using PIDocumento26 páginasSpeed Control of DC Servo Motor Using PIUjjawal DarvaikarAinda não há avaliações
- Torque MeasurementDocumento43 páginasTorque Measurementvadithya1515Ainda não há avaliações
- Induction Machines: Principle of Operation and Equivalent Circuit ModelDocumento15 páginasInduction Machines: Principle of Operation and Equivalent Circuit ModelRyan BenjaminAinda não há avaliações
- A Design of The DC Motor Control CircuitDocumento9 páginasA Design of The DC Motor Control Circuitnyskyscraper051127Ainda não há avaliações
- Finalpaper 135Documento6 páginasFinalpaper 135vinaynitw257Ainda não há avaliações
- Solid State Drives Short BookDocumento25 páginasSolid State Drives Short BookGomathi Raja MAinda não há avaliações
- User's Manual: D.C. Motor StudyDocumento25 páginasUser's Manual: D.C. Motor Studymanoj_varma_1Ainda não há avaliações
- Web Motor GlossaryDocumento7 páginasWeb Motor GlossaryansabhiAinda não há avaliações
- Induction Motor Speed ControlDocumento46 páginasInduction Motor Speed Controlsolo400060% (10)
- DC Servo MotorDocumento6 páginasDC Servo MotortaindiAinda não há avaliações
- Torque Sensor: 3.1 Measurement MethodsDocumento12 páginasTorque Sensor: 3.1 Measurement MethodsEric KerrAinda não há avaliações
- Aim: Apparatus Required: Theory:: Torque TransducerDocumento4 páginasAim: Apparatus Required: Theory:: Torque TransducerArjyajyoti GoswamiAinda não há avaliações
- Expt 7 Shock Absorber Test RigDocumento5 páginasExpt 7 Shock Absorber Test RigRithwik pawarAinda não há avaliações
- Measure CHDocumento60 páginasMeasure CHIshu KumarAinda não há avaliações
- Aim: Apparatus Required: Theory:: Torque TransducerDocumento4 páginasAim: Apparatus Required: Theory:: Torque TransducerNishant JainAinda não há avaliações
- Control System ComponentsDocumento29 páginasControl System Componentsshreemanti0% (1)
- Slip Torque Characteristics of Induction MotorDocumento22 páginasSlip Torque Characteristics of Induction MotorSree ShobhaAinda não há avaliações
- Med - 2013-05-12 - Vibration Measurement and ApplicationsDocumento27 páginasMed - 2013-05-12 - Vibration Measurement and ApplicationsArslan AdeelAinda não há avaliações
- Induction Motor Drive Control MethodsDocumento8 páginasInduction Motor Drive Control MethodsRudra Kumar MishraAinda não há avaliações
- Final Control ElementsDocumento76 páginasFinal Control ElementsUtkarsh ModiAinda não há avaliações
- Intelligent Braking System Literature ReviewDocumento39 páginasIntelligent Braking System Literature ReviewRaj WagdariAinda não há avaliações
- RBT Lab Manuval 11E608 CEDocumento106 páginasRBT Lab Manuval 11E608 CEnandhakumarmeAinda não há avaliações
- مصدر التقرير الاحتراقDocumento45 páginasمصدر التقرير الاحتراقياسر سعد حسونAinda não há avaliações
- Guide: Mr. M. Srinivasa Rao Asso. ProffesorDocumento49 páginasGuide: Mr. M. Srinivasa Rao Asso. ProffesorSaurabh MishraAinda não há avaliações
- Synchro Application Guide: TransmitterDocumento9 páginasSynchro Application Guide: TransmitterLeviatan McblueAinda não há avaliações
- An Serv 002 PDFDocumento20 páginasAn Serv 002 PDFMario TapiaAinda não há avaliações
- AC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of HelwanDocumento25 páginasAC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of Helwanadelelsamahy5958Ainda não há avaliações
- 3.2 Sensors and TransducersDocumento38 páginas3.2 Sensors and Transducersjohanna shaanyenengeAinda não há avaliações
- Torque 1Documento13 páginasTorque 1Raghvendra TiwariAinda não há avaliações
- Oos and TorsionDocumento14 páginasOos and TorsionlisusedAinda não há avaliações
- Vibration EngineeringDocumento37 páginasVibration EngineeringAlen Benguit II0% (1)
- 4 DynamometerDocumento8 páginas4 DynamometerParesh PatilAinda não há avaliações
- Torsion: Shear Stress & Twist (3.1-3.5Documento27 páginasTorsion: Shear Stress & Twist (3.1-3.5Anonymous RGLhewESFAinda não há avaliações
- Ee 331 Design - Servo MotorDocumento5 páginasEe 331 Design - Servo MotorLa-Pierre O'MeallyAinda não há avaliações
- SANKAR POLYTECHNIC COLLEGE (AUTONOMOUS) SANKAR NAGAR DIPLOMA IN ELECTRICAL AND ELECTRONICS ENGINEERINGDocumento45 páginasSANKAR POLYTECHNIC COLLEGE (AUTONOMOUS) SANKAR NAGAR DIPLOMA IN ELECTRICAL AND ELECTRONICS ENGINEERINGDilipkumarSureshAinda não há avaliações
- InductionMotors Gate Material PartBDocumento38 páginasInductionMotors Gate Material PartBpraveen6494Ainda não há avaliações
- Induction MachineDocumento48 páginasInduction MachinechethanAinda não há avaliações
- Torque Measurement (Torsion Meters)Documento6 páginasTorque Measurement (Torsion Meters)Raghvendra Singh ShaktawatAinda não há avaliações
- Measuring Engine Power with a DynamometerDocumento14 páginasMeasuring Engine Power with a Dynamometerpradip payghanAinda não há avaliações
- Servo Motor SelectionDocumento11 páginasServo Motor Selectionanandparasu100% (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlNo EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlNota: 5 de 5 estrelas5/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNota: 2 de 5 estrelas2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkAinda não há avaliações
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsNo EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsAinda não há avaliações
- ACM2 TAU Datasheet enDocumento5 páginasACM2 TAU Datasheet envishiwizardAinda não há avaliações
- Part Winding Startting The Three-Phase Squirrel Cage Induction Motor Air Gap Magnetic Field AnalysisDocumento6 páginasPart Winding Startting The Three-Phase Squirrel Cage Induction Motor Air Gap Magnetic Field AnalysisIjabiAinda não há avaliações
- ReadmeDocumento4 páginasReadmevishiwizardAinda não há avaliações
- TRL Definitions PDFDocumento1 páginaTRL Definitions PDFBHARadwajAinda não há avaliações
- Electric Vehicle Motor Design NotesDocumento131 páginasElectric Vehicle Motor Design NotesvishiwizardAinda não há avaliações
- Jeas 1012 787Documento5 páginasJeas 1012 787vishiwizardAinda não há avaliações
- LJLVJK LVJJV LKJVDocumento5 páginasLJLVJK LVJJV LKJVvishiwizardAinda não há avaliações
- Hardware Inloop Simulation IEEE LabVIEWDocumento1 páginaHardware Inloop Simulation IEEE LabVIEWvishiwizardAinda não há avaliações
- 50 SCS Automotive Coatings - Rev0913Documento4 páginas50 SCS Automotive Coatings - Rev0913vishiwizardAinda não há avaliações
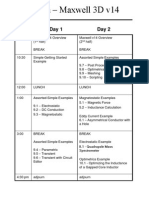
- Maxwell 3D v14 Training AgendaDocumento1 páginaMaxwell 3D v14 Training AgendavishiwizardAinda não há avaliações
- Engineered PlasticsDocumento61 páginasEngineered Plastics고병석Ainda não há avaliações
- 5 SmanualDocumento16 páginas5 SmanualMark ThomasAinda não há avaliações
- Nit 3600 1Documento5 páginasNit 3600 1vishiwizardAinda não há avaliações
- Recent Advances in Materials For Use in Permanent Magnet Machines - A ReviewDocumento7 páginasRecent Advances in Materials For Use in Permanent Magnet Machines - A ReviewvishiwizardAinda não há avaliações
- FAB Resistivity White PaperDocumento8 páginasFAB Resistivity White PapervishiwizardAinda não há avaliações
- Maxwell 2dDocumento7 páginasMaxwell 2dvishiwizardAinda não há avaliações
- Big Energy Series 11.5.2012 Qing-Chang ZhongDocumento1 páginaBig Energy Series 11.5.2012 Qing-Chang ZhongvishiwizardAinda não há avaliações
- Op - XT546 246 346 - Op288 V03Documento2 páginasOp - XT546 246 346 - Op288 V03vishiwizardAinda não há avaliações
- Presentation 1Documento1 páginaPresentation 1vishiwizardAinda não há avaliações
- Brushless Motor FundamentalsDocumento13 páginasBrushless Motor FundamentalsvishiwizardAinda não há avaliações
- Sensors Used in HEVDocumento4 páginasSensors Used in HEVvishiwizard100% (1)
- Electrical Resin BenefitsDocumento2 páginasElectrical Resin BenefitsvishiwizardAinda não há avaliações
- Cam DesignDocumento13 páginasCam DesignvishiwizardAinda não há avaliações
- Wittich2011 SonkusaleVanderveldeDocumento1 páginaWittich2011 SonkusaleVanderveldevishiwizardAinda não há avaliações
- FTF Aut f0234Documento38 páginasFTF Aut f0234vishiwizardAinda não há avaliações
- Sona SPEED CatalogueDocumento13 páginasSona SPEED CataloguevishiwizardAinda não há avaliações
- Lit Survey RamamurthyDocumento9 páginasLit Survey RamamurthyvishiwizardAinda não há avaliações
- How to Check a MOSFETDocumento2 páginasHow to Check a MOSFETvishiwizardAinda não há avaliações
- Motor Primer1Documento2 páginasMotor Primer1vishiwizardAinda não há avaliações
- A Brief Overview of Electric & Hybrid Electric Vehicle TechnologiesDocumento1 páginaA Brief Overview of Electric & Hybrid Electric Vehicle TechnologiesvishiwizardAinda não há avaliações
- The Importance of WritingDocumento4 páginasThe Importance of WritingBogdan VasileAinda não há avaliações
- Confirmation Form: Pillar Regional Conference (NCR)Documento1 páginaConfirmation Form: Pillar Regional Conference (NCR)Llano Multi-Purpose CooperativeAinda não há avaliações
- Measuring Algorithm Efficiency Using Time and Space ComplexityDocumento8 páginasMeasuring Algorithm Efficiency Using Time and Space ComplexityGovind RathoreAinda não há avaliações
- A Hirshfeld Surface Analysis and Crystal StructureDocumento8 páginasA Hirshfeld Surface Analysis and Crystal StructureLidiane MicheliniAinda não há avaliações
- Manufacturing Processes (ME361) Lecture 13: Instructor: Shantanu BhattacharyaDocumento28 páginasManufacturing Processes (ME361) Lecture 13: Instructor: Shantanu BhattacharyaSahil SundaAinda não há avaliações
- University Reserch Worksheet PDFDocumento7 páginasUniversity Reserch Worksheet PDFapi-410567922Ainda não há avaliações
- Guimaras State CollegeDocumento5 páginasGuimaras State CollegeBabarianCocBermejoAinda não há avaliações
- Plenaristas León 2022xDocumento6 páginasPlenaristas León 2022xGloria MontielAinda não há avaliações
- Lecture 6Documento16 páginasLecture 6Dina Saad EskandereAinda não há avaliações
- Engine Controls (Powertrain Management) - ALLDATA RepairDocumento5 páginasEngine Controls (Powertrain Management) - ALLDATA RepairXavier AlvarezAinda não há avaliações
- Penomoran Bantex - K64&COMPDocumento8 páginasPenomoran Bantex - K64&COMPVigour Rizko MurdyneAinda não há avaliações
- Mohammad Abu-Radi ResumeDocumento4 páginasMohammad Abu-Radi ResumeMohammad Abu-RadiAinda não há avaliações
- Schwarzschild Metric and Black Hole HorizonsDocumento39 páginasSchwarzschild Metric and Black Hole Horizonsসায়ন চক্রবর্তীAinda não há avaliações
- Movement Joints (NHBC)Documento5 páginasMovement Joints (NHBC)hemendraengAinda não há avaliações
- CFLM1 Chapter 1Documento24 páginasCFLM1 Chapter 1Jonathan TawagAinda não há avaliações
- Lab 01 - HCV and LCV by Gas CalorimeterDocumento6 páginasLab 01 - HCV and LCV by Gas CalorimeterTakreem SindhuAinda não há avaliações
- Feasibility of Traditional Milk DeliveryDocumento21 páginasFeasibility of Traditional Milk DeliverySumit TomarAinda não há avaliações
- Stylistic and DiscourseDocumento4 páginasStylistic and Discourseeunhye carisAinda não há avaliações
- ISO 17000 2004 Terms & DefintionsDocumento6 páginasISO 17000 2004 Terms & DefintionsSelvaraj SimiyonAinda não há avaliações
- Pnas 1703856114Documento5 páginasPnas 1703856114pi. capricorniAinda não há avaliações
- Volvo S6 66 Manual TransmissionDocumento2 páginasVolvo S6 66 Manual TransmissionCarlosAinda não há avaliações
- The Critical Need For Software Engineering EducationDocumento5 páginasThe Critical Need For Software Engineering EducationGaurang TandonAinda não há avaliações
- Adverb Affirmation Negation LessonDocumento4 páginasAdverb Affirmation Negation LessonMire-chan Bacon100% (1)
- J05720020120134026Functions and GraphsDocumento14 páginasJ05720020120134026Functions and GraphsmuglersaurusAinda não há avaliações
- Giljang - Bsn2-A10 - Sas 1-3Documento7 páginasGiljang - Bsn2-A10 - Sas 1-3Cherylen Casul GiljangAinda não há avaliações
- Fort St. John - Tender Awards - RCMP Building ConstructionDocumento35 páginasFort St. John - Tender Awards - RCMP Building ConstructionAlaskaHighwayNewsAinda não há avaliações
- Giraffe Juice GamesDocumento32 páginasGiraffe Juice Gamesgwyn022100% (3)
- Employees' Job Satisfaction and Organizational Performance A Case of KSRTCDocumento4 páginasEmployees' Job Satisfaction and Organizational Performance A Case of KSRTCEditor IJTSRDAinda não há avaliações
- HRM Assignment Final - Case StudyDocumento7 páginasHRM Assignment Final - Case StudyPulkit_Bansal_2818100% (3)
- Saes H 201Documento9 páginasSaes H 201heartbreakkid132Ainda não há avaliações