Você também pode gostar
- June Current AffairsDocumento18 páginasJune Current AffairssaibapoleAinda não há avaliações
- Budget Summary PDFDocumento23 páginasBudget Summary PDFsaibapoleAinda não há avaliações
- Varalakshmi Vratham Telugu PDFDocumento12 páginasVaralakshmi Vratham Telugu PDFsaibapole100% (1)
- Telugu UPSCDocumento9 páginasTelugu UPSCsaibapoleAinda não há avaliações
- What NextDocumento10 páginasWhat NextbalajiAinda não há avaliações
- Laex 120 Days ProgramDocumento19 páginasLaex 120 Days ProgramsaibapoleAinda não há avaliações
- Sathyabama University: (Established Under Section 3 of UGC Act, 1956)Documento4 páginasSathyabama University: (Established Under Section 3 of UGC Act, 1956)saibapoleAinda não há avaliações
- Foreign Affairs: Cold WarDocumento9 páginasForeign Affairs: Cold WarsaibapoleAinda não há avaliações
- Guru Paduka StotramDocumento3 páginasGuru Paduka StotramBraham sharma100% (3)
- Maurice Nicoll The Mark PDFDocumento4 páginasMaurice Nicoll The Mark PDFErwin KroonAinda não há avaliações
- FactsDocumento1 páginaFactssaibapoleAinda não há avaliações
- Optimizing Engineering Designs Using A Combined Genetic SearchDocumento8 páginasOptimizing Engineering Designs Using A Combined Genetic SearchsaibapoleAinda não há avaliações
- Desalination of Water S.sai - BHARGAVDocumento1 páginaDesalination of Water S.sai - BHARGAVsaibapoleAinda não há avaliações
- CLAW CheatcodesDocumento2 páginasCLAW CheatcodessaibapoleAinda não há avaliações
- ASIO4ALL v2 Instruction ManualDocumento11 páginasASIO4ALL v2 Instruction ManualDanny_Grafix_1728Ainda não há avaliações
- 27 Riveted Joints Types and UsesDocumento11 páginas27 Riveted Joints Types and UsesPRASAD326100% (1)
- ConferenceDocumento2 páginasConferencesaibapoleAinda não há avaliações
- 7 Self-Esteem StepsDocumento7 páginas7 Self-Esteem StepssaibapoleAinda não há avaliações
- Schedule XDocumento3 páginasSchedule XsaibapoleAinda não há avaliações
- TopicsDocumento1 páginaTopicssaibapoleAinda não há avaliações
- GuestLecture ProfChidambaramDocumento62 páginasGuestLecture ProfChidambaramsaibapoleAinda não há avaliações
- Oct 2 MarksDocumento10 páginasOct 2 MarkssaibapoleAinda não há avaliações
- Training at Nanocentre - July December 2013Documento4 páginasTraining at Nanocentre - July December 2013saibapoleAinda não há avaliações
- Dye Manufacturing: Industry Description and PracticesDocumento4 páginasDye Manufacturing: Industry Description and PracticesvinayarenAinda não há avaliações
- Rast Camphor MethodDocumento1 páginaRast Camphor MethodbbtbadalAinda não há avaliações
- Trinadha VrathaKalpamDocumento22 páginasTrinadha VrathaKalpamrakuelliAinda não há avaliações
- Schx4004 Mechanical Operations LabDocumento23 páginasSchx4004 Mechanical Operations LabsaibapoleAinda não há avaliações
- Cre NotesDocumento56 páginasCre Notesbhaskar5377Ainda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- Lesson 12&13Documento4 páginasLesson 12&13Jhynes RenomeronAinda não há avaliações
- Our Findings ShowDocumento35 páginasOur Findings ShowNarimane BelamriAinda não há avaliações
- Love Marriage Specialist PanditDocumento3 páginasLove Marriage Specialist PanditLove marriage specialist panditAinda não há avaliações
- Power Learning Strategies Success College Life 7th Edition Feldman Test BankDocumento24 páginasPower Learning Strategies Success College Life 7th Edition Feldman Test BankKathyHernandeznobt100% (32)
- Biochips: Submitted byDocumento17 páginasBiochips: Submitted byCharina Marie CaduaAinda não há avaliações
- Master Trip Relay PDFDocumento2 páginasMaster Trip Relay PDFEr Suraj KumarAinda não há avaliações
- Rotary InformationDocumento14 páginasRotary InformationMohammad UsmanAinda não há avaliações
- Juhi S. Khandekar: Email ID: Contact (M) : +91-7710007972Documento1 páginaJuhi S. Khandekar: Email ID: Contact (M) : +91-7710007972Reddi SyamsundarAinda não há avaliações
- The Students Allotted With The Is Available at The End of The DocumentDocumento4 páginasThe Students Allotted With The Is Available at The End of The DocumentShivaAinda não há avaliações
- NOT 012 ROTAX Fuel PumpDocumento9 páginasNOT 012 ROTAX Fuel PumpGaberAinda não há avaliações
- SSP PP05 Production ExecutionDocumento13 páginasSSP PP05 Production ExecutionArpit AgrawalAinda não há avaliações
- Sperry BM E S Band Scanner Tech SpecDocumento2 páginasSperry BM E S Band Scanner Tech SpecBeto GallardoAinda não há avaliações
- Entrepreneurial Skills-II: in This Chapter..Documento34 páginasEntrepreneurial Skills-II: in This Chapter..TECH-A -TRONICSAinda não há avaliações
- Weld-On Brackets Type 35Documento1 páginaWeld-On Brackets Type 35Achraf BoudayaAinda não há avaliações
- Md. Shahriar Haque Mithun: GPH Ispat LimitedDocumento3 páginasMd. Shahriar Haque Mithun: GPH Ispat LimitedMd. Shahriar haque mithunAinda não há avaliações
- Construction Cost Estimation SystemDocumento5 páginasConstruction Cost Estimation SystemURBANHIJAUAinda não há avaliações
- JERES-J-607 Burner Management Systems For SRU TrainsDocumento24 páginasJERES-J-607 Burner Management Systems For SRU TrainsMahi IndraAinda não há avaliações
- Arduino Nano DHT11 Temperature and Humidity VisualDocumento12 páginasArduino Nano DHT11 Temperature and Humidity Visualpower systemAinda não há avaliações
- Questions and AnswersDocumento14 páginasQuestions and AnswersRishit KunwarAinda não há avaliações
- B-0018-1-Al Khayal Gen. Cont. (Hordi Block) (Comp. Strength)Documento1 páginaB-0018-1-Al Khayal Gen. Cont. (Hordi Block) (Comp. Strength)Matrix LaboratoryAinda não há avaliações
- Lecture-3 (Design Methods)Documento26 páginasLecture-3 (Design Methods)Mohsin IqbalAinda não há avaliações
- Activity 6Documento29 páginasActivity 6Kenneth Puguon0% (1)
- OpenTaps in RetailDocumento13 páginasOpenTaps in RetailtarunsainaniAinda não há avaliações
- Elisee - 150 Service ManualDocumento176 páginasElisee - 150 Service ManualDawoodAinda não há avaliações
- AE 321 - Module 07 - FinalDocumento14 páginasAE 321 - Module 07 - FinalJohn Client Aclan RanisAinda não há avaliações
- AN1009: Driving MOSFET and IGBT Switches Using The Si828x: Key FeaturesDocumento22 páginasAN1009: Driving MOSFET and IGBT Switches Using The Si828x: Key FeaturesNikolas AugustoAinda não há avaliações
- TPS65150 Low Input Voltage, Compact LCD Bias IC With VCOM BufferDocumento48 páginasTPS65150 Low Input Voltage, Compact LCD Bias IC With VCOM BufferNurudeen KaikaiAinda não há avaliações
- How To Automatically Backup phpMyAdmin - SQLBackupAndFTP's BlogDocumento6 páginasHow To Automatically Backup phpMyAdmin - SQLBackupAndFTP's BlogIbn KhaledAinda não há avaliações
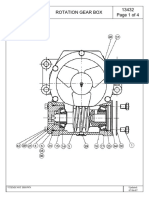
- Caja de Engranes para Pluma DunbarRotationGearBoxDocumento4 páginasCaja de Engranes para Pluma DunbarRotationGearBoxMartin CalderonAinda não há avaliações
- Managerial Economics and Strategy: Third EditionDocumento30 páginasManagerial Economics and Strategy: Third EditionRaeAinda não há avaliações