Você também pode gostar
- Ingeniería Mecánica - Estática, Robert W.Soutas-Little PDFDocumento467 páginasIngeniería Mecánica - Estática, Robert W.Soutas-Little PDFMario Ernesto Duran Lopez84% (32)
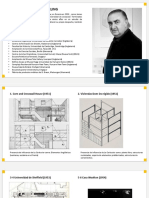
- James StirlingDocumento20 páginasJames StirlingVanya Maythe Vargas NavarroAinda não há avaliações
- Taller Semana 2 AuditoriasDocumento11 páginasTaller Semana 2 Auditoriasivonnesaray50% (2)
- Manual Indra Drive FCDocumento236 páginasManual Indra Drive FCRoberto VarelaAinda não há avaliações
- Presentacion CAT 797Documento105 páginasPresentacion CAT 797Rodrigo Rios100% (1)
- Poe 3Documento11 páginasPoe 3Vyco Crow CrawAinda não há avaliações
- Derivadas Producto Cociente y Orden SuperioDocumento4 páginasDerivadas Producto Cociente y Orden SuperioRoberto VarelaAinda não há avaliações
- Marco Teórico Segunda Ley de NewtonDocumento6 páginasMarco Teórico Segunda Ley de NewtonRoberto VarelaAinda não há avaliações
- 5g en La DomóticaDocumento4 páginas5g en La DomóticaRoberto VarelaAinda não há avaliações
- Aplicaciones Tecnologicas de La Emision Electrónica de AtomosDocumento7 páginasAplicaciones Tecnologicas de La Emision Electrónica de AtomosRoberto VarelaAinda não há avaliações
- Impactos Al Medio Ambiente Por Cultivos Transgénicos en América LatinaDocumento6 páginasImpactos Al Medio Ambiente Por Cultivos Transgénicos en América LatinaRoberto VarelaAinda não há avaliações
- Procedimiento para Encendido de Equipos Después de Paro de PlantaDocumento3 páginasProcedimiento para Encendido de Equipos Después de Paro de PlantaRoberto VarelaAinda não há avaliações
- MonografiaDocumento23 páginasMonografiaByth EscobarAinda não há avaliações
- Prentación PRESIÓNDocumento112 páginasPrentación PRESIÓNJhonSebastianGarcia100% (1)
- Validar Formulario Con JQuery ValidateDocumento3 páginasValidar Formulario Con JQuery ValidateAntonio CadenasAinda não há avaliações
- (Software Quality Assurance,) : IntegrantesDocumento10 páginas(Software Quality Assurance,) : IntegrantesEfren Coronel WilliamsAinda não há avaliações
- Planos Final - Puertas de Madera PNVRDocumento11 páginasPlanos Final - Puertas de Madera PNVRNery MamaniAinda não há avaliações
- 1 Imperfecciones CristalinasDocumento37 páginas1 Imperfecciones Cristalinasanon_420306389Ainda não há avaliações
- GuardamotoresDocumento1 páginaGuardamotoresJohanny BaqueroAinda não há avaliações
- Catalogo Cerasa CeramicosDocumento12 páginasCatalogo Cerasa CeramicosMarco A. PonceAinda não há avaliações
- Instalaciones HidraulicasDocumento18 páginasInstalaciones HidraulicasFrancia Blue skyAinda não há avaliações
- Problemas EquilibrioDocumento4 páginasProblemas EquilibriotioguillyAinda não há avaliações
- Portón Automático k3 - K5eDocumento4 páginasPortón Automático k3 - K5ePabloAlvAinda não há avaliações
- FRM-FRM-2015-015 Rev 1Documento2 páginasFRM-FRM-2015-015 Rev 1neckerAinda não há avaliações
- Cinematica DirectaDocumento8 páginasCinematica DirectamikelkatenaAinda não há avaliações
- Ejercicios EstequiometriaDocumento2 páginasEjercicios EstequiometriakakaAinda não há avaliações
- TC6Documento10 páginasTC6Ricardo Jesús JARA GIMENEZAinda não há avaliações
- Soluciones Tecnologicas Aplicables A Las OrganizacionesDocumento4 páginasSoluciones Tecnologicas Aplicables A Las OrganizacionesCristhian Pérez100% (1)
- Planta de Cogeneración Eléctrica San CarlosDocumento19 páginasPlanta de Cogeneración Eléctrica San CarlosJosé AlavaAinda não há avaliações
- Bagazo de CañaDocumento11 páginasBagazo de CañaSegundo Arana YoplacAinda não há avaliações
- Catalogo Tee Partida 3480ai AcDocumento2 páginasCatalogo Tee Partida 3480ai AcIv PqAinda não há avaliações
- S04 MaterialDocumento31 páginasS04 Materialmedrano.huaylla.190Ainda não há avaliações
- Carta #001-2022 Asistente de ProyectosDocumento21 páginasCarta #001-2022 Asistente de ProyectosJhosber Cercado EspAinda não há avaliações
- Programa Algoritmia PDFDocumento3 páginasPrograma Algoritmia PDFLUIS CAMILO INGUILÁN RODRÍGUEZAinda não há avaliações
- Nuevo Hoja de Cálculo de Microsoft ExcelDocumento4 páginasNuevo Hoja de Cálculo de Microsoft ExcelCesar GarciaAinda não há avaliações
- Regulador de CargaDocumento13 páginasRegulador de CargaDiego LozanoAinda não há avaliações
- 4 Caserios, Caso Laguna de Olomega.Documento3 páginas4 Caserios, Caso Laguna de Olomega.Arturo DuranAinda não há avaliações