Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Ijctee 0612 02Documento6 páginasIjctee 0612 02vintin4uAinda não há avaliações
- Powertrain Validation ToolsDocumento1 páginaPowertrain Validation Toolsvintin4uAinda não há avaliações
- 12 Chapter 6Documento57 páginas12 Chapter 6vintin4uAinda não há avaliações
- 06529657Documento6 páginas06529657vintin4uAinda não há avaliações
- Urn 100399Documento82 páginasUrn 100399Sreekanth SurendrenAinda não há avaliações
- Grid-Connected PVDocumento4 páginasGrid-Connected PVsiddhartha_anirbanAinda não há avaliações
- Evaluation of The Main MPPT Techniques For Photovoltaic Applications PDFDocumento12 páginasEvaluation of The Main MPPT Techniques For Photovoltaic Applications PDFnmotanAinda não há avaliações
- Classification and Comparison of Maximum Power Point Tracking Techniques For Photovoltaic System A ReviewDocumento11 páginasClassification and Comparison of Maximum Power Point Tracking Techniques For Photovoltaic System A Reviewvintin4uAinda não há avaliações
- A53 2 Shmilovitz Distributed Maximum Power Point Tracking in Photovoltaic Systems Emerging Architectures and Control MethodsDocumento14 páginasA53 2 Shmilovitz Distributed Maximum Power Point Tracking in Photovoltaic Systems Emerging Architectures and Control Methodsvintin4uAinda não há avaliações
- Design and Simulation of Photo Voltaic Water Pumping SystemDocumento113 páginasDesign and Simulation of Photo Voltaic Water Pumping SystemBhukya Mangu100% (1)
- Full Bridge 3 PortDocumento10 páginasFull Bridge 3 Portvintin4uAinda não há avaliações
- Fuz MPPT PumpDocumento10 páginasFuz MPPT Pumpvintin4uAinda não há avaliações
- PDFDocumento8 páginasPDFkanda71Ainda não há avaliações
- PDFDocumento8 páginasPDFkanda71Ainda não há avaliações
- Power System Stabilisation With ANNDocumento12 páginasPower System Stabilisation With ANNvintin4uAinda não há avaliações
- 1 PH Switched ReluctDocumento7 páginas1 PH Switched Reluctvintin4uAinda não há avaliações
- 5ph Induction MotorDocumento10 páginas5ph Induction Motorvintin4uAinda não há avaliações
- Design, Simulation and Implementation of An Intelligent MPPT Using A ZVCS Resonant DCDC ConverterDocumento1 páginaDesign, Simulation and Implementation of An Intelligent MPPT Using A ZVCS Resonant DCDC Convertervintin4uAinda não há avaliações
- 5ph Induction MotorDocumento10 páginas5ph Induction Motorvintin4uAinda não há avaliações
- AneethDocumento26 páginasAneethvintin4uAinda não há avaliações
- Automatic Circuit RecloserDocumento1 páginaAutomatic Circuit Recloservintin4uAinda não há avaliações
- Team 1Documento16 páginasTeam 1Bhaumik PatelAinda não há avaliações
- Wireless FidelityDocumento2 páginasWireless Fidelityvintin4uAinda não há avaliações
- Automatic Circuit RecloserDocumento1 páginaAutomatic Circuit Recloservintin4uAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- TIC106Documento9 páginasTIC106Osman KoçakAinda não há avaliações
- s7300 Cpu 31xc Technological Functions Operating Instructions en-US en-USDocumento404 páginass7300 Cpu 31xc Technological Functions Operating Instructions en-US en-USNguyen Minh Thuong100% (1)
- Alternating Current All-Electrical Gun Control System in Tanks (119KB)Documento6 páginasAlternating Current All-Electrical Gun Control System in Tanks (119KB)Suresh SAinda não há avaliações
- Innovative Smart Dustbin With An Android Applications Using IOTDocumento5 páginasInnovative Smart Dustbin With An Android Applications Using IOTRaghavendra TalankiAinda não há avaliações
- SET 600 Series User ManualDocumento189 páginasSET 600 Series User ManualJuan David AguayoAinda não há avaliações
- Grove Starter KitDocumento21 páginasGrove Starter KitJavier De La CruzAinda não há avaliações
- Arduino Based Led Street Light Auto Intensity ControlDocumento54 páginasArduino Based Led Street Light Auto Intensity ControlSUMITHA T57% (7)
- Embedded Systems Design: A Unified Hardware/Software IntroductionDocumento22 páginasEmbedded Systems Design: A Unified Hardware/Software IntroductionRoland SalloumAinda não há avaliações
- Monitor Williams KristelDocumento43 páginasMonitor Williams KristelOmar Beteta AranaAinda não há avaliações
- 【Switching Power Controller IC】: THX202HDocumento21 páginas【Switching Power Controller IC】: THX202HLucas BrendoAinda não há avaliações
- ME sFIDocumento10 páginasME sFIMai văn NhớAinda não há avaliações
- Soundstream 2016 CatalogDocumento25 páginasSoundstream 2016 CatalogMatthew BurkhalterAinda não há avaliações
- CypTube 3D Pipe Cutting Control SystemDocumento27 páginasCypTube 3D Pipe Cutting Control Systemsebastian carreñoAinda não há avaliações
- HJ3600 ManualDocumento4 páginasHJ3600 Manualmauro zarateAinda não há avaliações
- Report - Custom ControllerDocumento65 páginasReport - Custom Controllerapi-328908990100% (1)
- Green-Mode PWM Controller with High Voltage Startup Circuit DatasheetDocumento17 páginasGreen-Mode PWM Controller with High Voltage Startup Circuit Datasheetserrano.flia.coAinda não há avaliações
- PLC User's ManualDocumento32 páginasPLC User's ManualAlex Porro Seclen33% (9)
- AVR With Dead TimeDocumento26 páginasAVR With Dead TimegrittinjamesAinda não há avaliações
- PPT-DC To DC ConverterDocumento28 páginasPPT-DC To DC ConverterHimaja Mcc N100% (1)
- Portable Wattmeters: Thruline RF DirectionalDocumento1 páginaPortable Wattmeters: Thruline RF DirectionalAdolfo SilvaAinda não há avaliações
- Design and Installation of A Grid-Connected PV SystemDocumento181 páginasDesign and Installation of A Grid-Connected PV SystemWaseem67% (3)
- On InverterDocumento49 páginasOn InverterSahil ChoudharyAinda não há avaliações
- STM32Cube Firmware ExamplesDocumento31 páginasSTM32Cube Firmware ExamplescansuAinda não há avaliações
- DIGITAL COMMUNICATION-unit 2 VTUDocumento75 páginasDIGITAL COMMUNICATION-unit 2 VTUraghudathesh100% (12)
- Y6630D Installation GuideDocumento10 páginasY6630D Installation GuidemurtazasabirAinda não há avaliações
- Ko OrdinatorDocumento31 páginasKo Ordinatoruser100% (6)
- Induction Motor Drives: Speed Control MethodsDocumento73 páginasInduction Motor Drives: Speed Control MethodsSai Pranahita KulithalaiAinda não há avaliações
- Unit 4 & 5 MCQ on Compilation Process, Real-Time OS, Embedded SystemsDocumento50 páginasUnit 4 & 5 MCQ on Compilation Process, Real-Time OS, Embedded SystemsshrimanAinda não há avaliações
- Hassan SOSEDocumento6 páginasHassan SOSEedgarsierraAinda não há avaliações
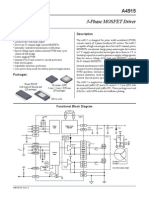
- 3-Phase MOSFET Driver: Description Features and BenefitsDocumento17 páginas3-Phase MOSFET Driver: Description Features and BenefitsRyan DelaneyAinda não há avaliações