Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Como Hacer Un Intercomunicador Con BluetoothDocumento40 páginasComo Hacer Un Intercomunicador Con BluetootheeindustrialAinda não há avaliações
- Servo Motor Control by Using Microcontroller PIC16F877ADocumento12 páginasServo Motor Control by Using Microcontroller PIC16F877Aeeindustrial100% (1)
- Basic Lamp DimmerDocumento3 páginasBasic Lamp DimmereeindustrialAinda não há avaliações
- HT12DDocumento11 páginasHT12DeeindustrialAinda não há avaliações
- Tca205a InfoDocumento1 páginaTca205a InfoeeindustrialAinda não há avaliações
- Laboratory Power Supply 24V 4ADocumento20 páginasLaboratory Power Supply 24V 4AeeindustrialAinda não há avaliações
- 100 Ic CircuitsDocumento42 páginas100 Ic CircuitseeindustrialAinda não há avaliações
- Pricilla and The WimpsDocumento6 páginasPricilla and The WimpseeindustrialAinda não há avaliações
- LM107Documento11 páginasLM107eeindustrialAinda não há avaliações
- Nte 6407Documento2 páginasNte 6407eeindustrialAinda não há avaliações
- Arrays y Clusters in LabviewDocumento9 páginasArrays y Clusters in LabvieweeindustrialAinda não há avaliações
- NTE6402 Programmable Unijunction Transistor (PUT) : DescriptionDocumento2 páginasNTE6402 Programmable Unijunction Transistor (PUT) : DescriptioneeindustrialAinda não há avaliações
- Mikrobus SpecificationDocumento1 páginaMikrobus SpecificationeeindustrialAinda não há avaliações
- Labview Course Exercise Code: National InstrumentsDocumento3 páginasLabview Course Exercise Code: National InstrumentseeindustrialAinda não há avaliações
- Sunwu FPKDocumento86 páginasSunwu FPKeeindustrialAinda não há avaliações
- Combinational Logic CircuitsDocumento30 páginasCombinational Logic CircuitseeindustrialAinda não há avaliações
- EMSOFT 2009 Mindstorms TutorialDocumento89 páginasEMSOFT 2009 Mindstorms TutorialeeindustrialAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- InteliVision 5 DatasheetDocumento2 páginasInteliVision 5 DatasheetandresAinda não há avaliações
- Vacon CXS IO Boards Installation Manual Ud244C enDocumento17 páginasVacon CXS IO Boards Installation Manual Ud244C enTanuTiganu0% (1)
- Panasonic+Th 46pz85u+Service+ManualDocumento128 páginasPanasonic+Th 46pz85u+Service+Manuala1electronicsAinda não há avaliações
- X299 Series Memory QVL 20200526Documento10 páginasX299 Series Memory QVL 20200526johndillbakersfieldAinda não há avaliações
- Unit: Data Link Layer (Marks 5) Computer Network BSC 6 Semester Sub: Computer Science (General) Data Link LayerDocumento3 páginasUnit: Data Link Layer (Marks 5) Computer Network BSC 6 Semester Sub: Computer Science (General) Data Link LayerNur ZuraidaAinda não há avaliações
- Atestat EnglezaDocumento16 páginasAtestat EnglezaCosmin CrisAinda não há avaliações
- UMTS900 Spectrum Carving SolutionDocumento10 páginasUMTS900 Spectrum Carving Solutionsandy_arisandyAinda não há avaliações
- 1 1Z621144312 PDFDocumento101 páginas1 1Z621144312 PDFvijeshvijayanAinda não há avaliações
- Max-Ng Overview and NGN ServicesDocumento33 páginasMax-Ng Overview and NGN ServicessatyaAinda não há avaliações
- Atmega328 Timer/Counter Usage: Sistemas Embebidos Oscar Acevedo, PHDDocumento10 páginasAtmega328 Timer/Counter Usage: Sistemas Embebidos Oscar Acevedo, PHDBrisman Ricardo Palacin VargasAinda não há avaliações
- Mi 10T Lite: User GuideDocumento10 páginasMi 10T Lite: User GuideMUHAMMED RASHIDAinda não há avaliações
- User Manual 4009600Documento3 páginasUser Manual 4009600Ahmed ProlicAinda não há avaliações
- 01 06 ByVention V03 enDocumento166 páginas01 06 ByVention V03 enjeronimost100% (2)
- Fractional-N Frequency SynthesizerDocumento5 páginasFractional-N Frequency SynthesizerbaymanAinda não há avaliações
- Cyient Transmit and Receive Module For Radar SystemsDocumento4 páginasCyient Transmit and Receive Module For Radar SystemsPercy100% (1)
- Micom Alstom P141, P142, P143, P144 & P145: Feeder Management RelayDocumento38 páginasMicom Alstom P141, P142, P143, P144 & P145: Feeder Management RelayNur Farahatan100% (2)
- Kaifa Meter Nameplate and LCD Description 20200513Documento51 páginasKaifa Meter Nameplate and LCD Description 20200513AmrAinda não há avaliações
- Unit-1 PicDocumento40 páginasUnit-1 Picsarath100% (1)
- CRR 718 Ben FTTHDocumento66 páginasCRR 718 Ben FTTHanupkrajakAinda não há avaliações
- AN-012-EN Reduce Acoustic Noise of IS31FL3236 EVB Rev.ADocumento4 páginasAN-012-EN Reduce Acoustic Noise of IS31FL3236 EVB Rev.ALászló MondaAinda não há avaliações
- Kre1052503 - 9 (Odv-065r15m18jj-G)Documento2 páginasKre1052503 - 9 (Odv-065r15m18jj-G)Jŕ MaiaAinda não há avaliações
- 1-Port Gigabit GPON/EPON Wireless-N ONU Router: Model No: iB-FONG11GWDocumento1 página1-Port Gigabit GPON/EPON Wireless-N ONU Router: Model No: iB-FONG11GWFilesAinda não há avaliações
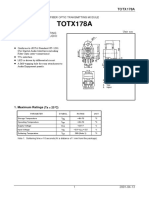
- TOTX178A: Fiber Optic Transmitting Module For Digital Audio EquipmentDocumento6 páginasTOTX178A: Fiber Optic Transmitting Module For Digital Audio EquipmentOscar Arturo Callirgos LozadaAinda não há avaliações
- T Rec G.9959 201501 I!!pdf eDocumento128 páginasT Rec G.9959 201501 I!!pdf eJason LaCockAinda não há avaliações
- Microwave: Microwaves Are A Form ofDocumento9 páginasMicrowave: Microwaves Are A Form ofDhanmeet KaurAinda não há avaliações
- LTE - Alarm MappingDocumento4 páginasLTE - Alarm MappingEhtesham KhanAinda não há avaliações
- Samsung Galaxy A01 CoreDocumento91 páginasSamsung Galaxy A01 CoreGeorge Looney BarboudisAinda não há avaliações
- National Conventions For Writing Telephone Numbers - Wikipedia, The Free EncyclopediaDocumento18 páginasNational Conventions For Writing Telephone Numbers - Wikipedia, The Free EncyclopediaAnonymous ysomURtAinda não há avaliações
- 3com Baseline Plus Switch 2900 Gigabit Family: Switching SwitchingDocumento4 páginas3com Baseline Plus Switch 2900 Gigabit Family: Switching SwitchingTerry McginnisAinda não há avaliações
- Bridge Axi AhbDocumento22 páginasBridge Axi Ahbkrishnaav100% (1)