Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Beam Deflection FormulaeDocumento2 páginasBeam Deflection Formulae7575757575100% (6)
- Workshop Manual MPIDocumento372 páginasWorkshop Manual MPIPhil ProfiliAinda não há avaliações
- (Studies in Mathematical Thinking and Learning Series) James J. Kaput, David W. Carraher, Maria L. Blanton-Algebra in The Early Grades-Routledge (2007) PDFDocumento549 páginas(Studies in Mathematical Thinking and Learning Series) James J. Kaput, David W. Carraher, Maria L. Blanton-Algebra in The Early Grades-Routledge (2007) PDFglorisaAinda não há avaliações
- Jokes and Their Relation To The Unconscious, FreudDocumento29 páginasJokes and Their Relation To The Unconscious, FreudSam FraserAinda não há avaliações
- Las Css 2nd Quarter - Performng Mensuration & CalculationDocumento4 páginasLas Css 2nd Quarter - Performng Mensuration & CalculationAlex ReyesAinda não há avaliações
- Density Word Problems PDFDocumento2 páginasDensity Word Problems PDFRomadel PeraltaAinda não há avaliações
- General Chemistry 2: Quarter 4 - Module 1: Second Law of ThermodynamicsDocumento27 páginasGeneral Chemistry 2: Quarter 4 - Module 1: Second Law of ThermodynamicsAriane Valdez100% (1)
- Converting Cars To The Sims 3 by LastinpurpleDocumento17 páginasConverting Cars To The Sims 3 by LastinpurpleSam Fraser100% (1)
- Forester Suspension 1Documento1 páginaForester Suspension 1Sam FraserAinda não há avaliações
- 3 Series Touring DatasheetDocumento2 páginas3 Series Touring DatasheetSam FraserAinda não há avaliações
- Forester 2001 Automatic Transmission 1Documento23 páginasForester 2001 Automatic Transmission 1Sam FraserAinda não há avaliações
- Forester SpecificationsDocumento5 páginasForester SpecificationsSam FraserAinda não há avaliações
- Example of The Use of Stokes TheoremDocumento3 páginasExample of The Use of Stokes TheoremSam FraserAinda não há avaliações
- Trusses - Method of JointsDocumento8 páginasTrusses - Method of JointsSam FraserAinda não há avaliações
- Gta IV Mod InstructionsDocumento1 páginaGta IV Mod InstructionsSam FraserAinda não há avaliações
- Energy Analysis of Control VolumesDocumento5 páginasEnergy Analysis of Control VolumesSam FraserAinda não há avaliações
- Plastics Identification Flow ChartDocumento1 páginaPlastics Identification Flow ChartSam FraserAinda não há avaliações
- Centre of MassDocumento13 páginasCentre of MassSam FraserAinda não há avaliações
- Worksheet Minmax SolnDocumento5 páginasWorksheet Minmax SolnSam FraserAinda não há avaliações
- ROF Quick Reference v0.4Documento2 páginasROF Quick Reference v0.4Sam FraserAinda não há avaliações
- The Physics of Medical ImagingDocumento14 páginasThe Physics of Medical ImagingSam Fraser0% (1)
- Understanding Scale Speed by Bob BoucherDocumento7 páginasUnderstanding Scale Speed by Bob BoucherSam FraserAinda não há avaliações
- Energy Analysis of Control VolumesDocumento5 páginasEnergy Analysis of Control VolumesSam FraserAinda não há avaliações
- Conceptual Design of Solar Powered Airplanes For Continuous FlightDocumento18 páginasConceptual Design of Solar Powered Airplanes For Continuous FlightSam FraserAinda não há avaliações
- Time, Speed and DistanceDocumento18 páginasTime, Speed and DistancePrithvi RajAinda não há avaliações
- Three-Phase Systems: Professor Mohamed A. El-SharkawiDocumento63 páginasThree-Phase Systems: Professor Mohamed A. El-Sharkawithe_tigdraAinda não há avaliações
- MCQ PhysicsDocumento24 páginasMCQ PhysicsBhardwaj Rajinder SippyAinda não há avaliações
- Distributed Energy Resource (DER) Application Form - Editable - June 2, ...Documento11 páginasDistributed Energy Resource (DER) Application Form - Editable - June 2, ...najia hossainAinda não há avaliações
- Practica 4 - Instrumentación y ControlDocumento10 páginasPractica 4 - Instrumentación y ControlRODRÍGUEZ RIVERA CLAUDIA PATRICIAAinda não há avaliações
- GASES With Varying Path LengthDocumento12 páginasGASES With Varying Path LengthKristine Ann VillanuevaAinda não há avaliações
- Distance vs. Displacement: What Is The Difference Between Distance and Displacement?Documento21 páginasDistance vs. Displacement: What Is The Difference Between Distance and Displacement?CaloykOoy Danday DueñasAinda não há avaliações
- 55-3 (Physics) PDFDocumento16 páginas55-3 (Physics) PDFABHISHEK TIWARIAinda não há avaliações
- Aakash CPP - 4Documento49 páginasAakash CPP - 4Rishi ShuklaAinda não há avaliações
- Internal Forced AnalysisDocumento65 páginasInternal Forced AnalysisJahir DipokAinda não há avaliações
- Maxon EC22 20watt Integrated ElectronicsDocumento2 páginasMaxon EC22 20watt Integrated ElectronicsElectromateAinda não há avaliações
- Intro To ThermodynamicsDocumento37 páginasIntro To ThermodynamicsOmer IqbalAinda não há avaliações
- Updating - MTO I - Unit 2 ProblemsDocumento3 páginasUpdating - MTO I - Unit 2 ProblemsmaheshAinda não há avaliações
- Solar Mobile ChargerDocumento11 páginasSolar Mobile ChargerMeand KitchenAinda não há avaliações
- Power Factor Correction (PFC) Circuit Basics: Brent Mcdonald and Ben LoughDocumento22 páginasPower Factor Correction (PFC) Circuit Basics: Brent Mcdonald and Ben LoughViet Anh DoAinda não há avaliações
- Active TransducerDocumento29 páginasActive TransducerBabasrinivas GuduruAinda não há avaliações
- Local Media1894977385713432647Documento8 páginasLocal Media1894977385713432647Zendrick MaltoAinda não há avaliações
- Contactplasma - About UsDocumento29 páginasContactplasma - About UsNgoc QuyenAinda não há avaliações
- Baze University, Abuja Faculty of Engineering Department of Mechanical EngineeringDocumento20 páginasBaze University, Abuja Faculty of Engineering Department of Mechanical EngineeringAudu SanusiAinda não há avaliações
- Thermistor DDocumento9 páginasThermistor DEdward DineshAinda não há avaliações
- Advanced Thermodynamics-3Documento59 páginasAdvanced Thermodynamics-3Onggy Aries SekaAinda não há avaliações
- Fans and Blowers ProblemsDocumento8 páginasFans and Blowers ProblemsJULIAN DOMINIC SOLEDADAinda não há avaliações
- A Gentlemans Guide To Smiths Gauges - PT - 2 - 2v0Documento25 páginasA Gentlemans Guide To Smiths Gauges - PT - 2 - 2v0pggoodAinda não há avaliações
- Test Procedure Trihal GEa120000aDocumento42 páginasTest Procedure Trihal GEa120000achichid2008Ainda não há avaliações
- Module 9 - GravityDocumento5 páginasModule 9 - GravitySukhvinder SinghAinda não há avaliações
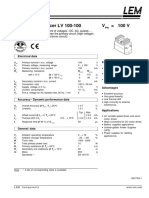
- Lem Voltage 100-500Documento2 páginasLem Voltage 100-500hieuhuech1Ainda não há avaliações