Você também pode gostar
- Data Sheet Dioda PenyearahDocumento3 páginasData Sheet Dioda PenyearahHeri SantosoAinda não há avaliações
- Ds 2433Documento23 páginasDs 2433Tutai LangtuAinda não há avaliações
- Perceptron Learning RulesDocumento38 páginasPerceptron Learning RulesVivek Goyal50% (2)
- SMD CatalogDocumento80 páginasSMD Catalogpbradaric91% (11)
- 40110Documento11 páginas40110Tutai LangtuAinda não há avaliações
- C For WinCCDocumento366 páginasC For WinCCtruongnv_vt100% (7)
- One Wire Ee PromDocumento15 páginasOne Wire Ee PromTutai Langtu100% (1)
- C For WinCCDocumento366 páginasC For WinCCtruongnv_vt100% (7)
- 74 HC 245Documento22 páginas74 HC 245Vương QuýAinda não há avaliações
- Datasheet 6b595Documento12 páginasDatasheet 6b595thangvc91Ainda não há avaliações
- Controlling LEDs with MicrocontrollersDocumento8 páginasControlling LEDs with MicrocontrollersTutai LangtuAinda não há avaliações
- Max232 DatasheetDocumento9 páginasMax232 DatasheetprincebahariAinda não há avaliações
- Datasheet 6b595Documento12 páginasDatasheet 6b595thangvc91Ainda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Tithi PRAVESHADocumento38 páginasTithi PRAVESHAdbbircs100% (1)
- Pnas 1703856114Documento5 páginasPnas 1703856114pi. capricorniAinda não há avaliações
- Final Term Quiz 2 On Cost of Production Report - Average CostingDocumento4 páginasFinal Term Quiz 2 On Cost of Production Report - Average CostingYhenuel Josh LucasAinda não há avaliações
- 21st Century Literature Exam SpecsDocumento2 páginas21st Century Literature Exam SpecsRachel Anne Valois LptAinda não há avaliações
- HR MasterlistDocumento6 páginasHR MasterlistLeychelle AnnAinda não há avaliações
- DLP Din8Documento2 páginasDLP Din8KOUDJIL MohamedAinda não há avaliações
- Lux MeterDocumento4 páginasLux MeterNmg KumarAinda não há avaliações
- Unit 3.1 - Hydrostatic ForcesDocumento29 páginasUnit 3.1 - Hydrostatic ForcesIshmael MvunyiswaAinda não há avaliações
- Understanding Power Dynamics and Developing Political ExpertiseDocumento29 páginasUnderstanding Power Dynamics and Developing Political Expertisealessiacon100% (1)
- Alaris 8210 and 8220 SpO2 Module Service ManualDocumento63 páginasAlaris 8210 and 8220 SpO2 Module Service ManualNaveen Kumar TiwaryAinda não há avaliações
- Design and Simulation of Programmable AC-DC Converter Using Pulse Width Modulation (PWM) Techniques in MATLABDocumento5 páginasDesign and Simulation of Programmable AC-DC Converter Using Pulse Width Modulation (PWM) Techniques in MATLABJeannot MpianaAinda não há avaliações
- The Truth of Extinction: 7.1 Nietzsche's FableDocumento2 páginasThe Truth of Extinction: 7.1 Nietzsche's FableGraciela Barón GuiñazúAinda não há avaliações
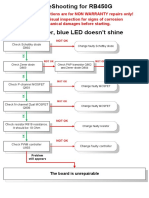
- RB450G Trouble ShootingDocumento9 páginasRB450G Trouble Shootingjocimar1000Ainda não há avaliações
- TCBE - Conversation Skills TemplateDocumento10 páginasTCBE - Conversation Skills TemplateAryoma GoswamiAinda não há avaliações
- Board of Intermediate & Secondary Education, Lahore: Tahir Hussain JafriDocumento2 páginasBoard of Intermediate & Secondary Education, Lahore: Tahir Hussain Jafridr_azharhayatAinda não há avaliações
- Xiaomi Mi Drone 4K User Manual GuideDocumento47 páginasXiaomi Mi Drone 4K User Manual GuideΜιχάλης ΛαχανάςAinda não há avaliações
- Inventory ManagementDocumento60 páginasInventory Managementdrashti0% (1)
- U1L2 - Definitions of 21st Century LiteraciesDocumento19 páginasU1L2 - Definitions of 21st Century LiteraciesJerry Glenn Latorre CastilloAinda não há avaliações
- Catalogue: Product Offering 51Documento56 páginasCatalogue: Product Offering 51Bruno MartinsAinda não há avaliações
- Rúbrica de composición escritaDocumento2 páginasRúbrica de composición escritafrancisco alonsoAinda não há avaliações
- Shop SupervisionDocumento38 páginasShop SupervisionSakura Yuno Gozai80% (5)
- Coating Inspector Program Level 1 Studen 1Documento20 páginasCoating Inspector Program Level 1 Studen 1AhmedBalaoutaAinda não há avaliações
- Popular Mechanics 2010-06Documento171 páginasPopular Mechanics 2010-06BookshebooksAinda não há avaliações
- Okto Engineering Experience ShareDocumento66 páginasOkto Engineering Experience Sharecengiz kutukcuAinda não há avaliações
- Whirlpool FL 5064 (ET)Documento8 páginasWhirlpool FL 5064 (ET)long_kongo100% (1)
- Limits, Fits and Tolerances: Prof. S. S. PandeDocumento31 páginasLimits, Fits and Tolerances: Prof. S. S. PandeM PankajAinda não há avaliações
- Destination Phrasal Verbs @destination - b1 - b2 - c1Documento25 páginasDestination Phrasal Verbs @destination - b1 - b2 - c1Samira GulomovaAinda não há avaliações
- Guimaras State CollegeDocumento5 páginasGuimaras State CollegeBabarianCocBermejoAinda não há avaliações
- CorentineDocumento559 páginasCorentinejames b willardAinda não há avaliações
- Cygnus 4plus Operating ManualDocumento141 páginasCygnus 4plus Operating Manualdzul effendiAinda não há avaliações