Você também pode gostar
- HF Series Generators ASM Technical GuideDocumento89 páginasHF Series Generators ASM Technical Guidevallade_alejandro8782100% (8)
- ATX Power Supply SchematicDocumento1 páginaATX Power Supply Schematicsontuyet82100% (2)
- Astronautics: Corporation of AmericaDocumento2 páginasAstronautics: Corporation of Americajoel alvaradoAinda não há avaliações
- Ifr6000 Operations Manual Manual User Guide en PDFDocumento320 páginasIfr6000 Operations Manual Manual User Guide en PDFbravo16893Ainda não há avaliações
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- PSD90-1C Operation ManualDocumento41 páginasPSD90-1C Operation ManualmglemAinda não há avaliações
- Viavi PSD90 1C Operating ManualDocumento44 páginasViavi PSD90 1C Operating ManualJuan RiosAinda não há avaliações
- ME406 and ME406 HM Description, Operation, Installation and Maintenance ManualDocumento68 páginasME406 and ME406 HM Description, Operation, Installation and Maintenance ManualFlyForFunAinda não há avaliações
- Investigations in Electric Power Technology: Modularized Systems Volumes 1 To 4Documento297 páginasInvestigations in Electric Power Technology: Modularized Systems Volumes 1 To 4Israel AriasAinda não há avaliações
- KDI 572-573-574 Mant. ManualDocumento164 páginasKDI 572-573-574 Mant. ManualmglemAinda não há avaliações
- Dukane Avionics TS500 Technical ManualDocumento6 páginasDukane Avionics TS500 Technical ManualAntonioAinda não há avaliações
- Aeroflex IFR6000 Test Set Operations Manual 6093Documento258 páginasAeroflex IFR6000 Test Set Operations Manual 6093chrismosf100% (1)
- TM 11-6625-2946-14Documento68 páginasTM 11-6625-2946-14Alexander J RokowetzAinda não há avaliações
- Radio Manager 2 Datasheet 2013 AwDocumento4 páginasRadio Manager 2 Datasheet 2013 AwDyego FelixAinda não há avaliações
- Mil STD 1310G PDFDocumento43 páginasMil STD 1310G PDFSeitan Nicoleta100% (1)
- xl4016 DatasheetDocumento10 páginasxl4016 DatasheetEduardo Jose Torres HernandezAinda não há avaliações
- Omm Battery Saft 13 Ene 2016Documento90 páginasOmm Battery Saft 13 Ene 2016Ramon0% (1)
- DC ReportDocumento15 páginasDC Reportapi-251473627Ainda não há avaliações
- CA-1550 Charger Analyzer ManualDocumento41 páginasCA-1550 Charger Analyzer ManualmonoramirexAinda não há avaliações
- Micro PumpDocumento21 páginasMicro Pumpalexjoel100% (1)
- Dukane DK100 ULDDocumento25 páginasDukane DK100 ULDetchegarayfAinda não há avaliações
- Avionics System Design - Co-Pilot 1553Documento29 páginasAvionics System Design - Co-Pilot 1553Ch Abdul MannanAinda não há avaliações
- Technical Manual Underwater Acoustic Beacon MODELS DK100/DK120/DK130/DK140Documento25 páginasTechnical Manual Underwater Acoustic Beacon MODELS DK100/DK120/DK130/DK140IlyaAinda não há avaliações
- Calibrating Angle Measurement ToolsDocumento21 páginasCalibrating Angle Measurement ToolsSerrot OnaivlisAinda não há avaliações
- 50kVA 400Hz Converter Heli A Model 4070Documento13 páginas50kVA 400Hz Converter Heli A Model 4070Mazhar SafdarAinda não há avaliações
- PL515M4-HG102633v5 15iDocumento235 páginasPL515M4-HG102633v5 15iHerry SusiloAinda não há avaliações
- Sae Arp 5483-8 2002 (En)Documento9 páginasSae Arp 5483-8 2002 (En)Oh No PotatoAinda não há avaliações
- Ksa 370 371 372Documento250 páginasKsa 370 371 372wilfredo jose guaricucoAinda não há avaliações
- 315 033260 9 - DpuDocumento52 páginas315 033260 9 - Dpuogautier60% (5)
- g7300-03r Tcas - Iff Control PanelDocumento2 páginasg7300-03r Tcas - Iff Control PanelMarcAinda não há avaliações
- 4500B InstructionManualDocumento368 páginas4500B InstructionManualtoddsimcoAinda não há avaliações
- Aa39 SeriesDocumento28 páginasAa39 Seriesjoel alvaradoAinda não há avaliações
- DC and Ac Power Circuits Training System: Labvolt SeriesDocumento30 páginasDC and Ac Power Circuits Training System: Labvolt SeriesSantiago CabayAinda não há avaliações
- TM 11-6625-2946-24PDocumento60 páginasTM 11-6625-2946-24PAlexander J RokowetzAinda não há avaliações
- 24 Electrical Power PDFDocumento87 páginas24 Electrical Power PDFDayana Andrea López TrujilloAinda não há avaliações
- Mx385 Owner S Manual-CompleteDocumento12 páginasMx385 Owner S Manual-CompleteFill CeeAinda não há avaliações
- Manual de Servicio Detallado Serie PRODocumento109 páginasManual de Servicio Detallado Serie PROアルトゥ アルトゥーロ100% (1)
- TM 11-1520-210-34P-1 PDFDocumento120 páginasTM 11-1520-210-34P-1 PDFEagle1968Ainda não há avaliações
- Omega Flow MweterDocumento2 páginasOmega Flow MweterIan G. WalkerAinda não há avaliações
- Installation Manual: 9900 Series Models 9900, 9900A and 9900BDocumento68 páginasInstallation Manual: 9900 Series Models 9900, 9900A and 9900BRandy SharpAinda não há avaliações
- Artex 8700 PN A3-06-2824Documento55 páginasArtex 8700 PN A3-06-2824P. Tourneux100% (1)
- Ceramic Capacitor Products: AVX Surface MountDocumento99 páginasCeramic Capacitor Products: AVX Surface MountMilap PatelAinda não há avaliações
- AmSafe NexGen SeatbeltDocumento35 páginasAmSafe NexGen SeatbeltRoman KytsaniukAinda não há avaliações
- Aircraft Gas Turbine Engine TestingDocumento7 páginasAircraft Gas Turbine Engine Testingfazelamjad70Ainda não há avaliações
- Anritsu 37xxxd OperationDocumento630 páginasAnritsu 37xxxd OperationHoang LongAinda não há avaliações
- Wiring Diagrams: Figure TitleDocumento44 páginasWiring Diagrams: Figure TitleEric DirksenAinda não há avaliações
- SB-4100 - Pitch Trim Actuator Hawker 400Documento7 páginasSB-4100 - Pitch Trim Actuator Hawker 400reginaldo11Ainda não há avaliações
- Sae Arp 5483-8 2002 (En) PDFDocumento9 páginasSae Arp 5483-8 2002 (En) PDFWilliam LooAinda não há avaliações
- Aircraft Electric Equipment Selection and Installation StandardsDocumento26 páginasAircraft Electric Equipment Selection and Installation StandardsqingtaoAinda não há avaliações
- Apr 39 BDocumento2 páginasApr 39 Byasir509Ainda não há avaliações
- Instruction Manual: PMG Voltage Regulator Model: XR2002/XR2002FDocumento21 páginasInstruction Manual: PMG Voltage Regulator Model: XR2002/XR2002FAlvaroAinda não há avaliações
- BT139394EDocumento23 páginasBT139394Ehin wongyai100% (1)
- Model 400/400A Maintenance Manual Scheduled InspectionsDocumento244 páginasModel 400/400A Maintenance Manual Scheduled InspectionsRene QueirozAinda não há avaliações
- EPIRB Tester 5410 MKII HandbookDocumento22 páginasEPIRB Tester 5410 MKII Handbookdashu3873Ainda não há avaliações
- Dyna 1750Documento2 páginasDyna 1750rahul shiv shankarAinda não há avaliações
- CASR Part 830 Amdt. 2 - Notification & Reporting of Aircraft Accidents, Incidents, or Overdue Acft & Investigation OCRDocumento17 páginasCASR Part 830 Amdt. 2 - Notification & Reporting of Aircraft Accidents, Incidents, or Overdue Acft & Investigation OCRHarry NuryantoAinda não há avaliações
- Software Exception HandlingDocumento7 páginasSoftware Exception HandlingMo TeakdongAinda não há avaliações
- Aerospace Actuators 2: Signal-by-Wire and Power-by-WireNo EverandAerospace Actuators 2: Signal-by-Wire and Power-by-WireAinda não há avaliações
- Dsa 8045Documento8 páginasDsa 8045Christian TadeoAinda não há avaliações
- Lab Volt Kit For 2 KW MachineDocumento12 páginasLab Volt Kit For 2 KW MachineSatyajit DasAinda não há avaliações
- Altistart 46: Open Style Soft Start Motor ControllersDocumento46 páginasAltistart 46: Open Style Soft Start Motor ControllersHazem Al-kayaliAinda não há avaliações
- EM120 Multibeam Echo Sounder Maintenance Manual Rev ADocumento274 páginasEM120 Multibeam Echo Sounder Maintenance Manual Rev ADenis Begansky100% (1)
- HT40 Nte6407 Diac PDFDocumento4 páginasHT40 Nte6407 Diac PDFrncc2011Ainda não há avaliações
- OH 03 PDH-SDH RevdDocumento22 páginasOH 03 PDH-SDH Revdrncc2011Ainda não há avaliações
- Uropean ETS 300 738 Elecommunication Tandard: Source: ETSI TC-HF Reference: DE/HF-01017Documento51 páginasUropean ETS 300 738 Elecommunication Tandard: Source: ETSI TC-HF Reference: DE/HF-01017rncc2011Ainda não há avaliações
- PDH SDH Dodatna LiteraturaDocumento53 páginasPDH SDH Dodatna LiteraturakiroonsiAinda não há avaliações
- OH 06 Products RevdDocumento18 páginasOH 06 Products Revdrncc2011Ainda não há avaliações
- 2N6343Documento7 páginas2N6343edferferfAinda não há avaliações
- BT136 DatasheetDocumento7 páginasBT136 DatasheetAbraham Garcia VeraAinda não há avaliações
- 2N6402Documento6 páginas2N6402rncc2011Ainda não há avaliações
- Ericsson SGSN PDFDocumento22 páginasEricsson SGSN PDFrncc2011Ainda não há avaliações
- 2N6027Documento9 páginas2N6027mariogizziAinda não há avaliações
- OH 05 IP-Basics RevdDocumento26 páginasOH 05 IP-Basics Revdrncc2011Ainda não há avaliações
- Texas Instruments TIC106D/M Datasheet from DatasheetCatalogDocumento8 páginasTexas Instruments TIC106D/M Datasheet from DatasheetCatalogrncc2011Ainda não há avaliações
- 07 Ti2440eu03ti 0001 Atm StandardsDocumento1 página07 Ti2440eu03ti 0001 Atm Standardsrncc2011Ainda não há avaliações
- GPRS EGPRSRNOptimisationWorkshop2Documento30 páginasGPRS EGPRSRNOptimisationWorkshop2rncc2011Ainda não há avaliações
- OH 04 ATM-basic RevdDocumento36 páginasOH 04 ATM-basic Revdrncc2011Ainda não há avaliações
- 12 Cnm111 Unidad Vi (Trafic) p1Documento42 páginas12 Cnm111 Unidad Vi (Trafic) p1rncc2011Ainda não há avaliações
- Powering Issues ExplainedDocumento76 páginasPowering Issues Explainedrncc2011Ainda não há avaliações
- Electromagnetic Frequency SpectrumDocumento10 páginasElectromagnetic Frequency Spectrumrncc2011Ainda não há avaliações
- OH 02 PhysicalMedia RevdDocumento10 páginasOH 02 PhysicalMedia Revdrncc2011Ainda não há avaliações
- Uninterruptible Power Supplies PDFDocumento254 páginasUninterruptible Power Supplies PDFNavaraj BaniyaAinda não há avaliações
- WCDMA Data TranscriptDocumento1.272 páginasWCDMA Data Transcriptrncc2011Ainda não há avaliações
- PA-41 Manual1 en PDFDocumento158 páginasPA-41 Manual1 en PDFrncc2011Ainda não há avaliações
- NI2 MeridianDocumento31 páginasNI2 Meridianfaridfirdaus65Ainda não há avaliações
- Option 11c & 11c Mini (1.5 MB Dti Pri)Documento102 páginasOption 11c & 11c Mini (1.5 MB Dti Pri)barone_28Ainda não há avaliações
- 4511100BIX Cross ConnectDocumento30 páginas4511100BIX Cross Connectrncc2011Ainda não há avaliações
- Macrotel MT16H Installation & Maintenence ManualDocumento137 páginasMacrotel MT16H Installation & Maintenence Manualrncc2011Ainda não há avaliações
- Swi oDocumento374 páginasSwi orncc2011Ainda não há avaliações
- Iso ModDocumento16 páginasIso ModBob YorkAinda não há avaliações
- Abb Manual On MV Switch GearDocumento60 páginasAbb Manual On MV Switch GearUrooj RizviAinda não há avaliações
- Lecture 11 - Module 2 The X-Ray Tube: Part Three - Anode DesignDocumento27 páginasLecture 11 - Module 2 The X-Ray Tube: Part Three - Anode DesignMichelle FerderbarAinda não há avaliações
- KFD2 EB2 189783 - EngDocumento2 páginasKFD2 EB2 189783 - EngnileshsbodkeAinda não há avaliações
- ATA 24 24.06.2008 - B2 L3 Ready To PrintDocumento103 páginasATA 24 24.06.2008 - B2 L3 Ready To PrintDmitryAinda não há avaliações
- Manual GCA01HD Video AmplifierDocumento3 páginasManual GCA01HD Video AmplifierJaime ZzaaAinda não há avaliações
- A02 SOW Appendix 3 IMSE Master Part ListDocumento134 páginasA02 SOW Appendix 3 IMSE Master Part ListrizkyAinda não há avaliações
- Central or Local Compensation of Earth-Fault Currents in Non-Effectively Earthed Distribution SystemsDocumento6 páginasCentral or Local Compensation of Earth-Fault Currents in Non-Effectively Earthed Distribution Systemsali didebanAinda não há avaliações
- L.C.D L.E.D T.V Panels Connection and Voltages UnderstandingDocumento7 páginasL.C.D L.E.D T.V Panels Connection and Voltages UnderstandingSaidfa FaAinda não há avaliações
- TDS 400kVA 20kV 400V 50Hz Dyn5 - 5 IndoorDocumento2 páginasTDS 400kVA 20kV 400V 50Hz Dyn5 - 5 IndoorAfrizal AntariksaAinda não há avaliações
- DWC - Weld - Plugs Recep - Layout 1Documento2 páginasDWC - Weld - Plugs Recep - Layout 1alftoyAinda não há avaliações
- NXAIR Design Catalogue PDFDocumento51 páginasNXAIR Design Catalogue PDFZalatiel Mecott ArandaAinda não há avaliações
- Boq AtsDocumento1 páginaBoq AtsMHD FAJRIAinda não há avaliações
- Loud HailerDocumento2 páginasLoud HailerBrillyanAinda não há avaliações
- Uso de Analizador de Video Sencore TVA92 - 2Documento2 páginasUso de Analizador de Video Sencore TVA92 - 2Antonio ChavezAinda não há avaliações
- Russian Connectors For Catlogue AlliedDocumento26 páginasRussian Connectors For Catlogue AlliedAdhitya GaneshaiahAinda não há avaliações
- Basic Range: BI1-Time Overcurrent RelayDocumento2 páginasBasic Range: BI1-Time Overcurrent RelayMidhun Varghese100% (1)
- 480 Volt Corner Grounded Delta Friend or FoeDocumento8 páginas480 Volt Corner Grounded Delta Friend or Foestudent_ujjwol3163Ainda não há avaliações
- Buck Non-Synchronous N-Type SwitchDocumento4 páginasBuck Non-Synchronous N-Type Switchzeropoint_romeoAinda não há avaliações
- Product - Power Transformer - EN PDFDocumento16 páginasProduct - Power Transformer - EN PDFMd Mustafijur Rahman TusharAinda não há avaliações
- ACS 2000AD APPL SW Troubleshooting ManualDocumento70 páginasACS 2000AD APPL SW Troubleshooting Manualadrianahouki75% (4)
- Light CurtainsDocumento2 páginasLight CurtainsJorge ResendeAinda não há avaliações
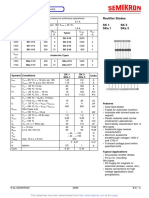
- Rectifier Diodes Sk1 Sk3 Ska 1 Ska 3: Types Types SK 1/10 SK 1/12 SK 1/14 SK 1/16 SK 3/10 SK 3/12 SK 3/14 SK 3/16Documento4 páginasRectifier Diodes Sk1 Sk3 Ska 1 Ska 3: Types Types SK 1/10 SK 1/12 SK 1/14 SK 1/16 SK 3/10 SK 3/12 SK 3/14 SK 3/16jorgeAinda não há avaliações
- ME6118 MicroneDocumento12 páginasME6118 MicroneinfosolutionAinda não há avaliações
- Diodos ZenerDocumento3 páginasDiodos Zenerremanuel18Ainda não há avaliações
- 14 Installation of TransformerDocumento3 páginas14 Installation of TransformerhazihappyAinda não há avaliações
- Cogenda Vtcad Tutorial PDFDocumento11 páginasCogenda Vtcad Tutorial PDFShailendra KumarAinda não há avaliações
- Geared DC Instrument Motor 1308 SeriesDocumento1 páginaGeared DC Instrument Motor 1308 SeriesIdehen KelvinAinda não há avaliações
- Week 5Documento10 páginasWeek 5Mudit AgarwalAinda não há avaliações
- Lamps - Bulbs, Batteries, Reflectors, LEDs, Infrared Sources and AccessoriesDocumento3 páginasLamps - Bulbs, Batteries, Reflectors, LEDs, Infrared Sources and AccessoriesEdwing Ramon Ayala EstupiñanAinda não há avaliações