www.ijape.
orgInternationalJournalofAutomationandPowerEngineering(IJAPE)Volume2Issue4,May2013
166
ResearchonBalancedWindingUsed
in3Y/3YpolechangingMotor
DaweiMeng
*1
,QianWang
2
DepartmentofElectricandElectronicEngineering,HarbinUniversityofScienceandTechnology
Harbin,China
*1
mengdawei@hrbust.edu.cn;
2
wangqian_mail@126.com
Abstract
To address the imbalance problem among branches per
phase in 3Y/3Ypolechanging motor, this paper proposes
the concept of balanced winding, explains the method of
constructing it in detail and presents the general derivation
processofitsmagnetomotiveforce.Usefulconclusionswere
obtained after analyzing the harmonic magnetomotive force
of balanced winding with specified pitch through an
example.
Keywords
Winding;WindingFactor;MagnetomotiveForce;Harmonic
I nt r oduc t i on
Amotorspolepairnumbercanbealteredbychanging
its winding connection. As the main supporting
equipment to drive a fan or pump, a polechanging
motorwithvariousspeedandoutputpowercanadjust
its mechanical property to meet load requirement.
Compared with variable frequency control, pole
changing control has some advantages such as lower
device investment, less maintenance cost and lighter
harmonic pollution, even though this control method
regulates speed within a narrower range. Reasonably
designed and preciselymanufactured polechanging
motorscanofferdecentperformanceintheoccasionof
nonstrictrequestforspeedregulation.
There are two approaches to change the pole number
of a winding: Inverse polechanging and phase
conversion polechanging. The former approach
simplyconvertscurrentdirectioninafewcoilswithout
changing the assignment of slots, while the latter
redistributes some slots to other phases. Although in
some cases the latter approach may increase the
numberofleadwires,itcanachievehigherdistribution
factors. Phase conversion polechanging motors
usually adopt the 3Y/3Y conjunction mode with only
six lead wires. In this mode, extra circulation losses of
statorwindingsmightbeproducedifbranchesineach
phase were unbalanced. Splitting coil is invented to
reduce losses. However, the calculation to determine
coil split ratio is relatively complicated and the
calculationresultisquitedifferentfromtheidealvalue.
To design polechanging motor winding, a twinpole
pairsslotnumberphasediagramisputforward,onthe
basis of which this paper comes up with the idea of
balanced winding as well as its construction method
and constraints. Moreover, the general derivation
process of its magnetomotive force is given. Using
balanced winding with small harmonic content under
3Y/3Y connection mode with six lead wires can not
onlymakefulluseofthewindingbutalsoaddressthe
imbalance among branches belonging to the same
phase.
Const r uc t i on Met hod of Bal anc ed Wi ndi ng
JudgementontheFeasibilityofBalancingBranches
Judgingonthefeasibilityofmakingbranchesbalanced
refers to determining the possibility of constructing
balanced winding for the given slot number and two
differentpolepairnumbers.
The given slot number and two different pole pair
numbersarerepresentedwith Z and
1
p ,
2
p .The
expressions of the slot number per pole per phase are
asfollows:
1
1
1 1
2
2
2 2
6
6
N Z
q
p D
N Z
q
p D
= =
= =
(1)
Intheexpressionsabove,
1
D ,
1
N and
2
D ,
2
N are
two pairs of irreducible positive integers. Meanwhile,
1
D ,
2
D mustbelessthan
1
N ,
2
N respectively.
If the following five constraints are all met, winding
canbebalanced.( N
representsanypositiveinteger.)
InternationalJournalofAutomationandPowerEngineering(IJAPE)Volume2Issue4,May2013www.ijape.org
167
i
1 2
6 N N N =
.
ii
1 2
6 6 Z N N N = =
.
iii
1
4 N = or
2
2 N = .
iv Thevaluesof
1
D and
2
D
areevennumbersor
1.
v
1 2
2 p N p =
and
2 1
2 p N p =
.
TheTwinpolepairsSlotnumberPhaseDiagramand
theValidBlock
Essentially, twinpolepairs slotnumber phase
diagram is a table. It can be created by following the
stepsbelow:
1. Draw
1
6N columns in the horizontal direction
corresponding to
1
p and
2
6N rows in vertical
direction corresponding to
2
p . Each row or
each column corresponds to 2 electrical
degrees.
2. Write positive slot number 1 in the top left
cell. Then move
1
D columns in the horizontal
directionand
2
D rowsintheverticaldirection,
write positive slot number 2 in the
appropriate cell, and so forth until all positive
slotnumbersarefilledin.
3. Write negative slot number in the cell situated
electrical degrees from where the positive
slotnumberisplaced.
Firstly, divide the entire table into nine pieces evenly,
andthenspliteachpieceintothelefthalfandtheright
half.Toensurethatslotnumberswouldnotbechosen
repeatedly, the right half should be removed. And
what remains is a table with i rows and j columns.
Define this table as the valid block. Fig. 1 shows how
thevalidblockisconstituted.Asshown,whenthepole
number is
1
p , the three valid blocks along the same
horizontal direction, from left to right, correspond to
Phases 1, 2 and 3 successively, and the three valid
blocks along the same vertical direction, from top to
bottom,correspondtoBranches1,2and3ofthatphase.
Similarly, when the pole number is
2
p , the three valid
blocks along the same vertical direction, from top to
bottom, correspond to Phases 1, 2 and 3 successively,
and the three valid blocks along the same horizontal
direction,fromlefttoright,correspondtoBranches1,2
and3ofthephase.
TheProceduretoBalancetheWinding
For Column l of a valid block, count the cells that
contain the slot number, then set the total to be
l
a l j ( 1, 2,..., ) = , and for Row k , to be
k
a k i ( 1, 2,..., ) = .
For Br a nc h n n ( 1, 2, 3) = of Pha s e m m ( 1, 2, 3) =
corresponding to p
1
, express its slot distribution by
using
j mn
a a a a
1 2 3
( , , ,..., ) , which is a jdimensional
FIG.1DIAGRAMDESCRIBINGTHECONSTITUDECOURSEOF
THEVALIDBLOCK
vector, and for Branch n n ( 1, 2, 3) = of Phase
m m ( 1, 2, 3) = corresponding to p
2
, express its slot
distribution by using
i mn
a a a a
1 2 3
( , , ,..., ) , which is a
idimensional vector. Of the six vectors with the same
phase value, three of them must be equal. Double the
coil turns in the slot that corresponds to
x
a x k 1( = = or x 1) = toequalizetheotherthreevectors.
By following the procedures outlined above, three
branches of any phase will be balanced and the three
phaseswillbesymmetric,nomatterwhatthepolepair
numberis.
The Magnet omot i ve For c e of Bal anc ed
Wi ndi ng
To determine the magnetomotive force of each order
harmonicperphase,firstfindoutthatpercoilandthen
synthesize the same order harmonic magnetomotive
forcevectorsofallcoilsbelongingtothesamephase.
If alternating current ( =
c c
i I t 2 sin ) is applied to a
coilwith
c
N turns,themagnetomotiveforceofthiscoil
canbeexpressedas:
'
'
'=
' = + + ++ +
' =
c c c c cv
cv
v
F x F x F x F x F vx
F vx
1 2 3
1
( ) cos cos2 cos3 cos
cos
(2)
www.ijape.orgInternationalJournalofAutomationandPowerEngineering(IJAPE)Volume2Issue4,May2013
168
The abscissa of air gap circumference (mechanical
radian)isrepresentedwith x .
cv
F
'
, the harmonic magnetomotive force amplitude
when pole pair number equals to v v ( 1, 2, 3,...) ' ' = , can
beobtainedthroughFourierintegral.Theexpressionis
asfollows:
'
' =
'
' =
'
' +
'
' =
'
}
}
c
c
y
c
cv c c
c
y
c c
c c
c c
c c
c
c c
y
F i N v xdx
y
i N v xdx
y y
i N v
v
y y
v
v
y
i N v
v
2
0
2
2
2
(1 ) cos
2
2
cos
2
2 1
[ (1 ) sin( )
2 2
2
sin( )]
2 2
2
sin( )
2
(3)
c
y thepitchofcoil
Set the pole pair number of the fundamental wave to
be p and set v equal to v p / ' . v is the harmonic
order relative to the fundamental wave. The
th
v
harmonic magnetomotive force amplitude per coil is
expressedasfollows:
=
=
=
c c c
cv
c c c
c c
yv
i N py
F v
vp
i N y
v
vp
i N
k
vp
2
sin( )
2
2
sin( )
2
2
(4)
polardistanceofthefundamentalwave
yv
k shortspancoefficientofthe
th
v harmonic
The
th
v harmonic magnetomotive force amplitude per
phaseisexpressedasbelow:
|
=
=
c
v yv dv sv
yv dv sv
ai N
F k k k
vp
i N
k k k
vp
(5)
a thenumberofbranchesinparallel
N thetotalofturnsinseries
dv
k distributioncoefficientofthe
th
v harmonic
sv
k chutecoefficientofthe
th
v harmonic
i
|
phasecurrentinmotorstator
If threephase symmetric current is applied to the
balanced winding, the
th
v harmonic resultant
magnetomotiveforcecanbeexpressedas:
v s v v v
v
v
v
f t f t f t f t
F t v
F t v
F t v
1 2 3
1
2 12
3 13
( , ) ( , ) ( , ) ( , )
cos cos
cos( 120 ) cos( )
cos( 240 ) cos( )
u = u + u + u
= e u
+ e u u
+ e u u
(6)
spaceangle(electricaldegree)
v v v
F F F
1 2 3
, , the
th
v harmonic magnetomotive force
amplitudeofPhase1,2and3
12
angle between the
th
v harmonic resultant
magnetomotive force vector of Phase 1 and the vector
ofPhase2
13
angle between the
th
v harmonic resultant
magnetomotive force vector of Phase 1 and the vector
ofPhase3
The Wi ndi ng Fac t or
It is known from the expression (5) that the harmonic
amplitude of per phase is proportional to the winding
factor of harmonic and inversely proportional to the
harmonic order. Thus, the harmonic content could be
analyzed through the winding factor
wv
k and it is
expressedbythethreecoefficientsasbelow:
wv yv dv sv
k k k k =
(7)
TheShortSpanCoefficient
The short span coefficient of the
th
v harmonic can be
evaluatedbythefollowingequation.
=
c
yv
y
k v
sin( )
2
(8)
To make the coil turns identical in each slot, the pitch
of balanced winding must meet the pitch constraints,
that is,
c
y isnt equal to the difference of any two slot
numberscorrespondedtothedoubledturnscoil.
TheDistributionCoefficient
The distribution coefficient of the
th
v harmonic can be
InternationalJournalofAutomationandPowerEngineering(IJAPE)Volume2Issue4,May2013www.ijape.org
169
calculatedbythefollowingequation.
1
1
M
kv
k
dv M
kv
k
F
k
F
=
=
=
(9)
kv
F
the
th
v harmonicmagnetomotiveforcevectorof
the
th
k
coilinonebranch
M thetotalofcoils
The composite diagram of the
th
v harmonic
magnetomotive force vector should be used to solve
equation (9). The following points should be noted in
constructingthisdiagram:
1. One branch of each phase is taken as the
minimalunit.
2. Setthevectormodulusofdoubledturnscoilto
be2,andtheothercoilstobe1.
3. For the coils in negative slot number, the
mi n u s s i g n b e f o r e t h e h a r mo n i c
magnetomotive force vector must be retained.
TheChuteCoefficient
Thebalancedwindingcontainsmanytoothharmonics.
Toreducetheseharmonics,slopingslotisadopted.The
chute coefficients corresponded to the two pole pair
numbers can be calculated by using two following
formulas.
sin
sin
sv
p
p
sv
p
p
p
v
Z
k
p
v
Z
p
v
Z
k
p
v
Z
'
'
=
'
(10)
p
polar distance of the fundamental wave when
polepairnumberis
1
( p p p = or
2
) p
p
'
polar distance of the fundamental wave when
polepairnumberis
2
( p p p ' ' = or
1
) p
sv
k chutecoefficientwhenpolepairnumberis p
sv
k chutecoefficientwhenpolepairnumberis p'
Appl i c at i on Ex ampl e
Take,forinstance,thestatorwindingof6/8polemotor
in3Y/3Yconnectionmodewhen 72 Z = .
Throughtheanalysis,itisknownthatslotnumberand
twodifferentpolepairnumberscanmeetthebalancing
constraints.BasedonthemethodmentionedinSection
2, valid blocks with six rows and four columns are
formed,asshowninFig.2.
Of the six vectors, the three 6dimensional vectors are
11
(2, 2, 2, 2) ,
12
(2, 2, 2, 2) and
13
(2, 2, 2, 2) respectively,
and the others are
11
(2,1,1, 2,1,1) ,
12
(1,1, 2,1,1, 2) and
13
(1, 2,1,1, 2,1) , so the three branches corresponded to
eight poles are imbalanced. To equalize these three
vectors,doublethecoilturnsinSlot2,3,14,15,46,47,
58, 59, 19, 30, 31 and 42. When m equals 2 or 3, its
balancingmethodisthesameasmentionedbefore.
FIG.2THETWINPOLEPAIRSSLOTNUMBERPHASE
DIAGRAMOFTHEEXAMPLE
The connection mode of winding is shown in Fig. 3,
andthenumberinsquarerepresentsthedoubledturns
coilnumber.
FIG.3THEFIGUREOFWINDINGCONNECTIONMODE
www.ijape.orgInternationalJournalofAutomationandPowerEngineering(IJAPE)Volume2Issue4,May2013
170
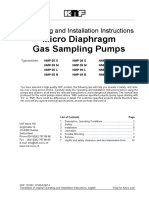
When the pole number is eight, the three branches of
Phase A are not balanced. For these three branches,
their composite diagrams of the fundamental wave
magnetomotive force vector before balancing are
shown in Figure 4(a), (b), (c). The composite diagrams
afterbalancingarethesame,asshowninFig.4(d),and
thedistributionfactorisequalto0.8312.
FIG.4THECOMPOSITEDIAGRAMSOFTHEFUNDAMENTAL
WAVEMAGNETOMOTIVEFORCEVECTORBEFOREAND
AFTERBALANCING(
20 =
)
When the pole number is six, the three branches of
phaseAarebalanced.Thesamecompositediagramof
the fundamental wave magneto motive force vector
before balancing is shown in Fig. 5(a), and the
distribution factor is 0.9577. The composite diagram
after balancing is shown in Fig. 5(b), and the
distributionfactoris0.9689.Thusitcanbeseenthatthe
distribution factor gets larger by using balanced
winding.
FIG.5THECOMPOSITEDIAGRAMSOFTHEFUNDAMENTAL
WAVEMAGNETOMOTIVEFORCEVECTORBEFOREAND
AFTERBALANCING(
15 =
)
FIG.5THEWINDINGDISTRIBUTIONSOFPHASEA
In this example, set the pitch
c
y to be 10 to meet the
pitchconstrains.ThewindingdistributionsofPhaseA
areshowninFig.6.
By the method described in the previous section, the
short span coefficient, distribution coefficient, chute
coefficient and winding factor of each order harmonic
areobtainedasfollows(seeTABLE1).
TABLE1WINDINGFACTORSOFEACHORDERHARMONIC
Conc l usi ons
Inconclusion,theadvantagesofbalancedwindingare
asfollows:
In3Y/3Yconnectionmode,thenumberoflead
wire is six, which makes motor system have
highreliability.
Under both two running states, the content of
odd harmonic is small and the even harmonic
dontexistatall.
The distribution factor of the fundamental
wave corresponded to a certain pole pair
numbergetslarger.
By using balanced winding, the circumfluence
among branches per phase can be basically
eliminated,whichmakesthethreebranchesof
eachphasebalanced.
Althoughtheapplicationscopeofbalancedwindingis
limited by constrains, this winding is so typical that it
can be widely used in the step speed regulating
occasion.
ACKNOWLEDGMENT
ThisworkwasfinanciallysupportedbytheNational
NaturalScienceFoundationofChina(No.51275137).
yv
k
dv
k
sv
k
wv
k
2p=6 2p=8 2p=6 2p=8 2p=6 2p=8 2p=6 2p=8
1 0.966 0.985 0.969 0.831 0.997 0.995 0.933 0.815
5 0.259 0.643 0.401 0.188 0.930 0.878 0.097 0.106
7 0.259 0.342 0.098 0.154 0.866 0.769 0.022 0.041
11 0.966 0.342 0.041 0.154 0.689 0.489 0.028 0.026
13 0.966 0.643 0.041 0.188 0.583 0.338 0.023 0.040
17 0.259 0.985 0.098 0.831 0.357 0.059 0.009 0.048
19 0.259 0.985 0.041 0.831 0.245 0.052 0.003 0.043
InternationalJournalofAutomationandPowerEngineering(IJAPE)Volume2Issue4,May2013www.ijape.org
171
REFERENCES
He Peng. The application of pole changing motor in the
petrochemicalindustry.PetrolChemicalDesign,2012.
Salif dit Tomboro Cisse. Design and analysis of single
winding doublespeed asysnchronous machine.
unpublished.
WuWuYinlong,LiJing.ThedesignanalysisofH.V.single
winding doublespeed threephase motor. Explosionproof
ElectricalMachine,2011.
Yu Kexun and Xu Shizhang, Twinpolepairs slotnumber
phase diagram used in designing the pole changing
motor. Academic Journal of Huazhong University of
ScienceandTechnology,1994.
Zheng Jun, Li Weili and Cao Junci. Calculated method of
extra cirulation losses in novel multistar phase shafted
pole changing windings. Explosionproof Electrical
Machine,2005.
Dawei Meng was born in Liaoning
Province, China, in 1956. He received the
Doctors degree in electrical engineering
from Harbin Institute of Technology,
Harbin,China,in1999.
Hewaspromotedtoprofessorin1998and
chosen as the PhD supervisor in 2003. He successively held
the posts of teaching director and dean of studies inHarbin
University of Science and Technology, and is currently the
vicechancellor. His research interests are numeral
calculation of physical field within the large electrical
machineandoptimizationdesignofthespecialmotor.
Prof.MengisamemberofChinaElectrotechnicalSociety.At
present, he is the editorial board director of Electric
MachinesandControl.
Qian Wang was born in Heilongjiang
Province, China, in 1988. She received the
Masters degree in electrical engineering
from Harbin University of Science and
Technology,Harbin,China,in2010.
She is studying for a doctors degree in
Harbin University of Science and Technology. Her research
interests are performance optimization of counterrotating
fanandwindingtypeofelectricalmachine.
Você também pode gostar
- Contact Characteristics of Metallic Materials in Conditions of Heavy Loading by Friction or by Electric CurrentDocumento7 páginasContact Characteristics of Metallic Materials in Conditions of Heavy Loading by Friction or by Electric CurrentSEP-PublisherAinda não há avaliações
- Delightful: The Saturation Spirit Energy DistributionDocumento4 páginasDelightful: The Saturation Spirit Energy DistributionSEP-PublisherAinda não há avaliações
- Influence of Aluminum Oxide Nanofibers Reinforcing Polyethylene Coating On The Abrasive WearDocumento13 páginasInfluence of Aluminum Oxide Nanofibers Reinforcing Polyethylene Coating On The Abrasive WearSEP-PublisherAinda não há avaliações
- Enhanced Causation For DesignDocumento14 páginasEnhanced Causation For DesignSEP-PublisherAinda não há avaliações
- Reaction Between Polyol-Esters and Phosphate Esters in The Presence of Metal CarbidesDocumento9 páginasReaction Between Polyol-Esters and Phosphate Esters in The Presence of Metal CarbidesSEP-PublisherAinda não há avaliações
- Experimental Investigation of Friction Coefficient and Wear Rate of Stainless Steel 202 Sliding Against Smooth and Rough Stainless Steel 304 Couter-FacesDocumento8 páginasExperimental Investigation of Friction Coefficient and Wear Rate of Stainless Steel 202 Sliding Against Smooth and Rough Stainless Steel 304 Couter-FacesSEP-PublisherAinda não há avaliações
- Improving of Motor and Tractor's Reliability by The Use of Metalorganic Lubricant AdditivesDocumento5 páginasImproving of Motor and Tractor's Reliability by The Use of Metalorganic Lubricant AdditivesSEP-PublisherAinda não há avaliações
- Effect of Slip Velocity On The Performance of A Magnetic Fluid Based Squeeze Film in Porous Rough Infinitely Long Parallel PlatesDocumento11 páginasEffect of Slip Velocity On The Performance of A Magnetic Fluid Based Squeeze Film in Porous Rough Infinitely Long Parallel PlatesSEP-PublisherAinda não há avaliações
- Device For Checking The Surface Finish of Substrates by Tribometry MethodDocumento5 páginasDevice For Checking The Surface Finish of Substrates by Tribometry MethodSEP-PublisherAinda não há avaliações
- FWR008Documento5 páginasFWR008sreejith2786Ainda não há avaliações
- Mindfulness and Happiness: The Empirical FoundationDocumento7 páginasMindfulness and Happiness: The Empirical FoundationSEP-PublisherAinda não há avaliações
- Microstructure and Wear Properties of Laser Clad NiCrBSi-MoS2 CoatingDocumento5 páginasMicrostructure and Wear Properties of Laser Clad NiCrBSi-MoS2 CoatingSEP-PublisherAinda não há avaliações
- Microstructural Development in Friction Welded Aluminum Alloy With Different Alumina Specimen GeometriesDocumento7 páginasMicrostructural Development in Friction Welded Aluminum Alloy With Different Alumina Specimen GeometriesSEP-PublisherAinda não há avaliações
- Enhancing Wear Resistance of En45 Spring Steel Using Cryogenic TreatmentDocumento6 páginasEnhancing Wear Resistance of En45 Spring Steel Using Cryogenic TreatmentSEP-PublisherAinda não há avaliações
- Mill's Critique of Bentham's UtilitarianismDocumento9 páginasMill's Critique of Bentham's UtilitarianismSEP-PublisherAinda não há avaliações
- Isage: A Virtual Philosopher System For Learning Traditional Chinese PhilosophyDocumento8 páginasIsage: A Virtual Philosopher System For Learning Traditional Chinese PhilosophySEP-PublisherAinda não há avaliações
- Quantum Meditation: The Self-Spirit ProjectionDocumento8 páginasQuantum Meditation: The Self-Spirit ProjectionSEP-PublisherAinda não há avaliações
- Metaphysics of AdvertisingDocumento10 páginasMetaphysics of AdvertisingSEP-PublisherAinda não há avaliações
- Technological Mediation of Ontologies: The Need For Tools To Help Designers in Materializing EthicsDocumento9 páginasTechnological Mediation of Ontologies: The Need For Tools To Help Designers in Materializing EthicsSEP-PublisherAinda não há avaliações
- Cold Mind: The Released Suffering StabilityDocumento3 páginasCold Mind: The Released Suffering StabilitySEP-PublisherAinda não há avaliações
- Social Conflicts in Virtual Reality of Computer GamesDocumento5 páginasSocial Conflicts in Virtual Reality of Computer GamesSEP-PublisherAinda não há avaliações
- Architectural Images in Buddhist Scriptures, Buddhism Truth and Oriental Spirit WorldDocumento5 páginasArchitectural Images in Buddhist Scriptures, Buddhism Truth and Oriental Spirit WorldSEP-PublisherAinda não há avaliações
- Ontology-Based Testing System For Evaluation of Student's KnowledgeDocumento8 páginasOntology-Based Testing System For Evaluation of Student's KnowledgeSEP-PublisherAinda não há avaliações
- A Tentative Study On The View of Marxist Philosophy of Human NatureDocumento4 páginasA Tentative Study On The View of Marxist Philosophy of Human NatureSEP-PublisherAinda não há avaliações
- Legal Distinctions Between Clinical Research and Clinical Investigation:Lessons From A Professional Misconduct TrialDocumento4 páginasLegal Distinctions Between Clinical Research and Clinical Investigation:Lessons From A Professional Misconduct TrialSEP-PublisherAinda não há avaliações
- The Effect of Boundary Conditions On The Natural Vibration Characteristics of Deep-Hole Bulkhead GateDocumento8 páginasThe Effect of Boundary Conditions On The Natural Vibration Characteristics of Deep-Hole Bulkhead GateSEP-PublisherAinda não há avaliações
- Computational Fluid Dynamics Based Design of Sump of A Hydraulic Pumping System-CFD Based Design of SumpDocumento6 páginasComputational Fluid Dynamics Based Design of Sump of A Hydraulic Pumping System-CFD Based Design of SumpSEP-PublisherAinda não há avaliações
- Damage Structures Modal Analysis Virtual Flexibility Matrix (VFM) IdentificationDocumento10 páginasDamage Structures Modal Analysis Virtual Flexibility Matrix (VFM) IdentificationSEP-PublisherAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Panasonic Dmr-Ex75-Ex85Documento85 páginasPanasonic Dmr-Ex75-Ex85videosonAinda não há avaliações
- Production Drawings & Process ModelsDocumento15 páginasProduction Drawings & Process ModelsnotonectalAinda não há avaliações
- Coal Carbonization: Current and Future ApplicationsDocumento9 páginasCoal Carbonization: Current and Future ApplicationsVenkata Krishnan RamanujamAinda não há avaliações
- 4 Buckle TriggersDocumento28 páginas4 Buckle TriggersNguyen Hoai Phuong100% (1)
- Nioec SP 00 89 (R0) (Ed1)Documento8 páginasNioec SP 00 89 (R0) (Ed1)aminAinda não há avaliações
- Plate Tectonic UnitDocumento95 páginasPlate Tectonic Unitapi-227272561Ainda não há avaliações
- Ultrasonic FlowmetersDocumento30 páginasUltrasonic Flowmetersvcharles0% (1)
- 20220606-03 Bombilla de Referencia - Prueba #1 - Después Del ADocumento11 páginas20220606-03 Bombilla de Referencia - Prueba #1 - Después Del Ajesus sanchezAinda não há avaliações
- Micro Diaphragm Gas Sampling Pumps: Operating and Installation InstructionsDocumento12 páginasMicro Diaphragm Gas Sampling Pumps: Operating and Installation Instructionssunilsheelavant100% (1)
- Gothic cathedral structural analysisDocumento43 páginasGothic cathedral structural analysisManuelPérezAinda não há avaliações
- Wind Loading of Industrial, Mining and Petrochemical StructuresDocumento16 páginasWind Loading of Industrial, Mining and Petrochemical StructuresapirakqAinda não há avaliações
- Multi-Traffic Scene Perception Based On Supervised LearningDocumento10 páginasMulti-Traffic Scene Perception Based On Supervised LearningChandhu DasariAinda não há avaliações
- Cobar 1400 Yumlu Mining With Paste FillDocumento26 páginasCobar 1400 Yumlu Mining With Paste FillSayantan ChakrabortyAinda não há avaliações
- Structural Design I: General Theory of BendingDocumento8 páginasStructural Design I: General Theory of BendingHimanshu duaAinda não há avaliações
- Coherent Motions in The Turbulent Boundary Layer!: Stephen RobinsonDocumento39 páginasCoherent Motions in The Turbulent Boundary Layer!: Stephen RobinsonUmair IsmailAinda não há avaliações
- Vts Capacity ProfileDocumento18 páginasVts Capacity ProfilevudinhnambrAinda não há avaliações
- Wave OpticsDocumento1 páginaWave OpticsBhupeshAinda não há avaliações
- Inductance Part 1 - MowryDocumento4 páginasInductance Part 1 - MowryJacky FanAinda não há avaliações
- Military RadarDocumento20 páginasMilitary Radarrakesh100% (2)
- Partition Coefficient Determination MethodsDocumento24 páginasPartition Coefficient Determination MethodsdeshmukhgeolAinda não há avaliações
- Shirokov 2020 IOP Conf. Ser. Mater. Sci. Eng. 775 012148Documento8 páginasShirokov 2020 IOP Conf. Ser. Mater. Sci. Eng. 775 012148Tomás de AlmeidaAinda não há avaliações
- Construction and Building MaterialsDocumento17 páginasConstruction and Building MaterialsjjAinda não há avaliações
- Recent Advancements in Aircraft Engine Health Management (EHM) Technologies and Recommendations For The Next StepDocumento13 páginasRecent Advancements in Aircraft Engine Health Management (EHM) Technologies and Recommendations For The Next StepDanu MamlukatAinda não há avaliações
- Gain Margin and Phase Margin Physical MeaningDocumento2 páginasGain Margin and Phase Margin Physical MeaningSaad MemonAinda não há avaliações
- Surveying Lecture 1Documento39 páginasSurveying Lecture 1Ruel Torres50% (4)
- PDU Assignment 3 TitleDocumento15 páginasPDU Assignment 3 Titleaqib rizwanAinda não há avaliações
- Example of Box Girder Bridge CalculationDocumento79 páginasExample of Box Girder Bridge Calculationaltarzakov100% (2)
- BMP Assignment IIDocumento3 páginasBMP Assignment IIShahminan ShahAinda não há avaliações
- Electric Field and Coulomb's LawDocumento19 páginasElectric Field and Coulomb's LawYukiko HachiAinda não há avaliações
- Dokumen - Tips - Cotter Joint PPTX 58f9ab8d3dbc9Documento19 páginasDokumen - Tips - Cotter Joint PPTX 58f9ab8d3dbc9Good YagAinda não há avaliações