Você também pode gostar
- GSM Controlled RobotDocumento46 páginasGSM Controlled RobotRavi Shankar K BAinda não há avaliações
- Mobile Controlled ROBOT Using DTMF Technology - Report1Documento10 páginasMobile Controlled ROBOT Using DTMF Technology - Report1Mukesh Yadav0% (2)
- Mobile RobotDocumento3 páginasMobile Robotshaan0806Ainda não há avaliações
- Remote Vehicle With Unlimited Range:: Circuit DescriptionDocumento7 páginasRemote Vehicle With Unlimited Range:: Circuit DescriptionThejeswara ReddyAinda não há avaliações
- Mobile Operated Land RoverDocumento10 páginasMobile Operated Land Roversyed_hafeez_2Ainda não há avaliações
- GSM Based Fire Fighting RobotDocumento35 páginasGSM Based Fire Fighting RobotRaushanVijaySingh100% (1)
- Mobile Phone Operated Land Rover: AbstractDocumento34 páginasMobile Phone Operated Land Rover: AbstractVishal JainAinda não há avaliações
- Cellphone Operated Landrover: Presented By-Santosh Jaybhaye Rakesh Kumar Sitesh SinghDocumento10 páginasCellphone Operated Landrover: Presented By-Santosh Jaybhaye Rakesh Kumar Sitesh SinghHitesh ShelkeAinda não há avaliações
- Mobile Operated Land RoverDocumento21 páginasMobile Operated Land RoverGirishprasanna MKAinda não há avaliações
- DTMF 2Documento8 páginasDTMF 2Prathamesh KesarkarAinda não há avaliações
- Cell Phone Operated Land RoverDocumento7 páginasCell Phone Operated Land RoverAmarjith ValancheryAinda não há avaliações
- Cell Phone Operated Land Rover/toy CarDocumento46 páginasCell Phone Operated Land Rover/toy Caranshul_all50% (2)
- Synopsis On Mobile Control RobotDocumento5 páginasSynopsis On Mobile Control RobotShirish MishraAinda não há avaliações
- DTMF Controller &line Follower Robot A:Dtmf ControllerDocumento4 páginasDTMF Controller &line Follower Robot A:Dtmf Controllerआशुतोष इंडियनAinda não há avaliações
- Intro: Cellphone Operated RobotDocumento6 páginasIntro: Cellphone Operated Robotamit26_lkoAinda não há avaliações
- Literature Review of DTMFDocumento4 páginasLiterature Review of DTMFRamesh Karumanchi100% (1)
- Mt8870 DTMF DecoderDocumento17 páginasMt8870 DTMF DecoderLawrence NgariAinda não há avaliações
- HOME AUTOMATION Control System USING DTMFDocumento27 páginasHOME AUTOMATION Control System USING DTMFdixant tiwariAinda não há avaliações
- Santhu Robot 2Documento5 páginasSanthu Robot 2Eslavath SanthuAinda não há avaliações
- DTMF Interfacing 8051 MicrocontrollerDocumento4 páginasDTMF Interfacing 8051 Microcontrollersarin.gaganAinda não há avaliações
- A2Z Control SystemDocumento4 páginasA2Z Control SystemZatin GuptaAinda não há avaliações
- Cellphone Operated Land RoverDocumento3 páginasCellphone Operated Land RoverNikhil DixitAinda não há avaliações
- Abstract-Mobile Controllrd RobotDocumento7 páginasAbstract-Mobile Controllrd RobotnitinsupekarAinda não há avaliações
- MobilePhone Controlled Robot Complete DocumentDocumento10 páginasMobilePhone Controlled Robot Complete DocumentDeepak Sing RohaAinda não há avaliações
- Embedded SystemDocumento119 páginasEmbedded SystemVidushi DalelaAinda não há avaliações
- DTMF Controlled Robot Using Arduino: Sushma Ronanki, Divya Tandra, Prasanth Pogiri, Dilleswara Rao TDocumento8 páginasDTMF Controlled Robot Using Arduino: Sushma Ronanki, Divya Tandra, Prasanth Pogiri, Dilleswara Rao Tsantiago pablo albertoAinda não há avaliações
- Ijret - Application of Dual Tone Multi Frequency Technology and Sensing in Autonomous Robotic NavigationDocumento5 páginasIjret - Application of Dual Tone Multi Frequency Technology and Sensing in Autonomous Robotic NavigationInternational Journal of Research in Engineering and TechnologyAinda não há avaliações
- DTMF Controlled Robot Without Microcontroller INTRODUCTIONDocumento3 páginasDTMF Controlled Robot Without Microcontroller INTRODUCTIONadebayo gabrielAinda não há avaliações
- 2.3 DTMF KitDocumento4 páginas2.3 DTMF KitAhmedAinda não há avaliações
- Cellphone Operated Robotic ArmDocumento55 páginasCellphone Operated Robotic ArmVinay ReddyAinda não há avaliações
- Cell Phone Operated Land-RoverDocumento26 páginasCell Phone Operated Land-RoverNitish Chincholi100% (2)
- Keywords: Mobile Phones, DTMF Decoder, ControllerDocumento4 páginasKeywords: Mobile Phones, DTMF Decoder, Controllermanoj260191Ainda não há avaliações
- RF Industrial Full ReportDocumento5 páginasRF Industrial Full ReportYallappa UppinAinda não há avaliações
- Robotics and Remotely Operated Vehicles: MAE, Alandi, Pune, India. 412105.Documento6 páginasRobotics and Remotely Operated Vehicles: MAE, Alandi, Pune, India. 412105.Pankaj KumarAinda não há avaliações
- Cell Phone Operated Land Rover: Pranveer Singh Institute of TechnologyDocumento12 páginasCell Phone Operated Land Rover: Pranveer Singh Institute of Technologypannu9Ainda não há avaliações
- Remote Vehicle Control Through Cell Phone Using DTMF @@@@Documento28 páginasRemote Vehicle Control Through Cell Phone Using DTMF @@@@PwAinda não há avaliações
- Remote Vehicle Control Through Cell Phone Using DTMF @@@@Documento28 páginasRemote Vehicle Control Through Cell Phone Using DTMF @@@@PwAinda não há avaliações
- Automated Line FollowingDocumento8 páginasAutomated Line FollowingManoj KumarAinda não há avaliações
- Cell Phone Operated Land RoverDocumento2 páginasCell Phone Operated Land RoverJeet Lyfz ChangedAinda não há avaliações
- Cellphone Controlled RobotDocumento35 páginasCellphone Controlled RobotAvni RajpalAinda não há avaliações
- DTMF Based Home Automation Without MicrocontrollerDocumento4 páginasDTMF Based Home Automation Without MicrocontrollertuhebAinda não há avaliações
- Mobile Operated Land RoverDocumento18 páginasMobile Operated Land RoverKaran TripathiAinda não há avaliações
- DTMF Controlled RobotDocumento24 páginasDTMF Controlled RobotJoel George AlexAinda não há avaliações
- Motor Control by DTMFDocumento5 páginasMotor Control by DTMFDhiraj RathoreAinda não há avaliações
- Mobile Controlled Robot Using DTMF TechnologyDocumento4 páginasMobile Controlled Robot Using DTMF TechnologyAshish Sharma100% (4)
- Range-Less Robot: A Project ReportDocumento14 páginasRange-Less Robot: A Project ReportJordanianAinda não há avaliações
- Home Automation: G Manihas Reddy - 08B81A1026 G.RAKESH REDDY - 08B81A1041 M.Srikanth - 08B81A1052Documento23 páginasHome Automation: G Manihas Reddy - 08B81A1026 G.RAKESH REDDY - 08B81A1041 M.Srikanth - 08B81A1052Nitin KumarAinda não há avaliações
- Lab Report FinalDocumento14 páginasLab Report FinalMalaika KhursheedAinda não há avaliações
- Design Methodology: Hi-Tech Security For Automobiles Through MobilesDocumento11 páginasDesign Methodology: Hi-Tech Security For Automobiles Through MobilesdivinedinuAinda não há avaliações
- Remote Control of Electrical Appliances Using GSM Networks: Abah O. Sunday Visa M. Ibrahim Abah JoshuaDocumento8 páginasRemote Control of Electrical Appliances Using GSM Networks: Abah O. Sunday Visa M. Ibrahim Abah JoshuaIJERDAinda não há avaliações
- Objective & MotivationDocumento15 páginasObjective & MotivationHimanshu SuranaAinda não há avaliações
- Device Control Using Telephone: Nagabhooshan S. ShetDocumento15 páginasDevice Control Using Telephone: Nagabhooshan S. ShetNicholas TaliAinda não há avaliações
- Mobile Operated Landrover Using DTMF DecoderDocumento5 páginasMobile Operated Landrover Using DTMF DecoderIJMERAinda não há avaliações
- DTMF Based Home AutomationDocumento28 páginasDTMF Based Home AutomationRenjith RavikumarAinda não há avaliações
- Home Automation Control System Using DTMFDocumento25 páginasHome Automation Control System Using DTMFengaydiAinda não há avaliações
- Final Seminar PresentationDocumento18 páginasFinal Seminar PresentationSaurabh NileyAinda não há avaliações
- Mobile Controlled RobotDocumento10 páginasMobile Controlled RobotManish DalwaniAinda não há avaliações
- 03 Quantisation NoiseDocumento8 páginas03 Quantisation NoiseNitin SoniAinda não há avaliações
- DTMF Based Wireless Mobile RobotDocumento103 páginasDTMF Based Wireless Mobile RobotKusum Verma0% (1)
- 03 Quantisation NoiseDocumento8 páginas03 Quantisation NoiseNitin SoniAinda não há avaliações
- 03 Quantisation NoiseDocumento8 páginas03 Quantisation NoiseNitin SoniAinda não há avaliações
- Curriculam Vitae: Technical ProficiencyDocumento2 páginasCurriculam Vitae: Technical ProficiencyKusum VermaAinda não há avaliações
- Wirehhhkiless Power TransmissionDocumento39 páginasWirehhhkiless Power TransmissionKusum VermaAinda não há avaliações
- B.N. College of Engineering and Technology, Lucknow: Numerical Techniques Lab-I (Based On Matlab) Quiz - 1Documento2 páginasB.N. College of Engineering and Technology, Lucknow: Numerical Techniques Lab-I (Based On Matlab) Quiz - 1Kusum VermaAinda não há avaliações
- B. N College of Engineering and Technology, LucknowDocumento15 páginasB. N College of Engineering and Technology, LucknowKusum VermaAinda não há avaliações
- 5th UnitDocumento29 páginas5th UnitKusum VermaAinda não há avaliações
- Project Lan 2Documento49 páginasProject Lan 2Sushobhan BhargavAinda não há avaliações
- B. N College of Engineering and Technology, LucknowDocumento15 páginasB. N College of Engineering and Technology, LucknowKusum VermaAinda não há avaliações
- Project Report On Mobile Controlled Robot Using DTMF TechnologyDocumento11 páginasProject Report On Mobile Controlled Robot Using DTMF TechnologyKusum VermaAinda não há avaliações
- Witn Listing All Species On EarthDocumento2 páginasWitn Listing All Species On EarthAna C RamosAinda não há avaliações
- 5th UnitDocumento29 páginas5th UnitKusum VermaAinda não há avaliações
- EBC Battery Charger User Manual V02 PDFDocumento16 páginasEBC Battery Charger User Manual V02 PDFAhmet Cem GezmişoğluAinda não há avaliações
- DSD SyllabusDocumento2 páginasDSD SyllabusprasathvlsiAinda não há avaliações
- Chapter 1-Introduction To Power SuppliesDocumento7 páginasChapter 1-Introduction To Power SuppliesBricksoe NgwenyaAinda não há avaliações
- DC Chop - Final ReportDocumento36 páginasDC Chop - Final ReportReeta DuttaAinda não há avaliações
- GAL22V10Documento21 páginasGAL22V10jackkairiAinda não há avaliações
- Taller Chapter 16 PDFDocumento2 páginasTaller Chapter 16 PDFManuel ZuñiigaAinda não há avaliações
- Sony Trinitron Color TV KV-29XL70E, K-KV29XL71E-K, Chassis AE-6B Parts & ServiceDocumento74 páginasSony Trinitron Color TV KV-29XL70E, K-KV29XL71E-K, Chassis AE-6B Parts & ServiceFlorescu FlorinAinda não há avaliações
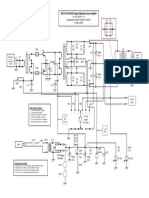
- SSB Amp Diagram 400w IRFP460Documento1 páginaSSB Amp Diagram 400w IRFP460Av PlugaruAinda não há avaliações
- PIC 16f877a Data SheetDocumento321 páginasPIC 16f877a Data SheetDanny CruzAinda não há avaliações
- Duratrax ICE Backlight ModificationDocumento10 páginasDuratrax ICE Backlight ModificationJose PetecaAinda não há avaliações
- 32PFL3515D-F7 pl10 - 3 - Phil - SM - Aen - 120110Documento108 páginas32PFL3515D-F7 pl10 - 3 - Phil - SM - Aen - 120110london335Ainda não há avaliações
- Manual Sundaya-Apple - 15 PDFDocumento1 páginaManual Sundaya-Apple - 15 PDFEduSizaAinda não há avaliações
- TechWeb E DL SiCDocumento88 páginasTechWeb E DL SiC王政雄Ainda não há avaliações
- Bannari Amman Institute of Technology: Regulation: 2018Documento2 páginasBannari Amman Institute of Technology: Regulation: 2018veerakumarsAinda não há avaliações
- Programmable Logic ControllersDocumento31 páginasProgrammable Logic Controllersgpz10100% (15)
- FL11 4 Funi PDFDocumento71 páginasFL11 4 Funi PDFmanuelAinda não há avaliações
- MEC1633Documento12 páginasMEC1633potatoAinda não há avaliações
- Chapter23 TelevisionDocumento37 páginasChapter23 TelevisionEsh WaramAinda não há avaliações
- Fiber Laser PDFDocumento2 páginasFiber Laser PDFDavid0% (2)
- RBS6601 Datasheet PDFDocumento2 páginasRBS6601 Datasheet PDFJosueMancoBarrenecheaAinda não há avaliações
- Alternator Stand AloneDocumento15 páginasAlternator Stand AloneMuhammad Rivaldi Firsttiara KAinda não há avaliações
- EE332 - Lab2 - Group 5 - Tang Anh TuanDocumento22 páginasEE332 - Lab2 - Group 5 - Tang Anh TuanTran TuAinda não há avaliações
- Typesofcomputersystemerror 160120080549Documento46 páginasTypesofcomputersystemerror 160120080549Kriz Anthony Zuniega100% (1)
- Marti STL 30Documento46 páginasMarti STL 30Renzzo Gomez ReatigaAinda não há avaliações
- EEE - R19 - 180 PagesDocumento180 páginasEEE - R19 - 180 PagesKanchiSrinivas100% (1)
- Computer GenerationsDocumento10 páginasComputer GenerationsJimuel Libunao SupanAinda não há avaliações
- Product Data Sheet: Motion Servo Drive LXM05A - 2 KW - 380..480 V - 3-Phase - With EMC FilterDocumento3 páginasProduct Data Sheet: Motion Servo Drive LXM05A - 2 KW - 380..480 V - 3-Phase - With EMC Filtersamet gozubolAinda não há avaliações
- User'S Guide: Easycoder® Pd42 PrinterDocumento126 páginasUser'S Guide: Easycoder® Pd42 Printerkrana26Ainda não há avaliações
- Medium Voltage Multilevel Converters StaDocumento16 páginasMedium Voltage Multilevel Converters StagianpicaAinda não há avaliações
- DCMT CompreDocumento3 páginasDCMT CompreBlessy JoyAinda não há avaliações