Você também pode gostar
- Power Supply RepairDocumento4 páginasPower Supply RepairterezkiAinda não há avaliações
- Troubleshooting Electronic Components With The PET BloodhoundNo EverandTroubleshooting Electronic Components With The PET BloodhoundAinda não há avaliações
- Wiring Headlight RelaysDocumento20 páginasWiring Headlight RelaysFloris van EnterAinda não há avaliações
- Transistor PDFDocumento27 páginasTransistor PDFAlexHidayatAinda não há avaliações
- Simple DC To DC Converter CircuitsDocumento10 páginasSimple DC To DC Converter Circuitscarlken_07100% (1)
- Stunguns Build Your Own Stun GunDocumento4 páginasStunguns Build Your Own Stun Gunjim100abAinda não há avaliações
- High Current DC Regulated Power Supply Circuit With LM317Documento5 páginasHigh Current DC Regulated Power Supply Circuit With LM317jonatanAinda não há avaliações
- 500 Watt DCDocumento9 páginas500 Watt DCTariq AliAinda não há avaliações
- 30 LED ProjectsDocumento60 páginas30 LED ProjectsfrioycalorAinda não há avaliações
- 1 100TransistorCircuitsDocumento133 páginas1 100TransistorCircuitscengiz doğanAinda não há avaliações
- Share What You MakeDocumento16 páginasShare What You MakeSameer ChakoleAinda não há avaliações
- 1 100TransistorCircuits PDFDocumento133 páginas1 100TransistorCircuits PDFAnonymous mqsR6k1q6Ainda não há avaliações
- Sound Operated Switch Using A Simple Transistor CircuitDocumento15 páginasSound Operated Switch Using A Simple Transistor CircuitIlija Sisoski0% (1)
- ICL8038 Function GeneratorDocumento6 páginasICL8038 Function Generatorvali dAinda não há avaliações
- Valve Curve TracerDocumento7 páginasValve Curve TracerIsa Campos100% (1)
- Zilano 2Documento22 páginasZilano 2blargbl100% (4)
- LevitationDocumento4 páginasLevitationJorge CordeiroAinda não há avaliações
- A Printed Circuit BoardDocumento7 páginasA Printed Circuit BoardmrhailgvnAinda não há avaliações
- ORGON ZAPPER Zapper Schematic Revisions and FREE Zapper Circuit SchematicsDocumento5 páginasORGON ZAPPER Zapper Schematic Revisions and FREE Zapper Circuit SchematicsCarlo CecchettiAinda não há avaliações
- Schema Circuitului Bistabil Licurici (THE FLIP FLOP) .OdtDocumento5 páginasSchema Circuitului Bistabil Licurici (THE FLIP FLOP) .OdtvladareanucatalindanAinda não há avaliações
- Zapper Circuit SchematicsDocumento4 páginasZapper Circuit SchematicsnuspyAinda não há avaliações
- Stereo VU MeterDocumento3 páginasStereo VU Metersarantapodarusa4009Ainda não há avaliações
- A Simple Inverter For Flourescent LampsDocumento5 páginasA Simple Inverter For Flourescent Lampstenk_manAinda não há avaliações
- Clutches, Brakes and Planed Stages PDFDocumento6 páginasClutches, Brakes and Planed Stages PDFCEVegaOAinda não há avaliações
- Opamp Wiki BookDocumento62 páginasOpamp Wiki Bookbnn123Ainda não há avaliações
- 1 100TransistorCircuits PDFDocumento133 páginas1 100TransistorCircuits PDFEugenio NanniAinda não há avaliações
- SKT Series Set-Up Parameter (V08 - 20100826)Documento32 páginasSKT Series Set-Up Parameter (V08 - 20100826)medmedAinda não há avaliações
- ESG2002 ControllerDocumento15 páginasESG2002 ControllerPedro Perez La Rosa100% (1)
- Motor Hidrostatico SauerDocumento80 páginasMotor Hidrostatico SauerAlexis Peña100% (1)
- Arduino Based Pulse Induction Detector - LC-Trap - 3 StepsDocumento6 páginasArduino Based Pulse Induction Detector - LC-Trap - 3 StepsMaribel Caricari ZuritaAinda não há avaliações
- A Simple Inverter For Flour..Documento8 páginasA Simple Inverter For Flour..Daniel Vladimir MaciucaAinda não há avaliações
- Control Valve Calibration Procedure Fisher HC6010 PDFDocumento14 páginasControl Valve Calibration Procedure Fisher HC6010 PDFAnonymous JwOs90v6TUAinda não há avaliações
- Equivalent Series Resistance MeterDocumento3 páginasEquivalent Series Resistance MeterJose RodriguezAinda não há avaliações
- Simples Proyectos para Probar Cosas Por Colin MitchellDocumento34 páginasSimples Proyectos para Probar Cosas Por Colin MitchellJimmy Pino SolisAinda não há avaliações
- DimmerDocumento39 páginasDimmerWahyumithali HamelianiAinda não há avaliações
- Infrared Emitter From CMOS 555 Robot RoomDocumento6 páginasInfrared Emitter From CMOS 555 Robot RoomnkimlevnAinda não há avaliações
- Automatic Rain Detector SynopsisDocumento4 páginasAutomatic Rain Detector SynopsisAnkush KhannaAinda não há avaliações
- True Bypass With Latching Relay: Smudgerd 14 CommentsDocumento8 páginasTrue Bypass With Latching Relay: Smudgerd 14 Commentsnanodocl5099Ainda não há avaliações
- Practical Report: Building A Power SupplyDocumento6 páginasPractical Report: Building A Power SupplyRynardt VogelAinda não há avaliações
- Circuitos Electronicos para ChisperoDocumento13 páginasCircuitos Electronicos para ChisperoEfra SosaAinda não há avaliações
- Coil WindingDocumento11 páginasCoil WindingGeorge LucianAinda não há avaliações
- Laser CommunicationDocumento19 páginasLaser CommunicationNeel VaniyaAinda não há avaliações
- Led CircuitsDocumento18 páginasLed CircuitsDedan Kimathi100% (1)
- Proyectos de Electronica.Documento27 páginasProyectos de Electronica.saiworAinda não há avaliações
- Automatic Grass Cutter MachineDocumento33 páginasAutomatic Grass Cutter MachineDebashishParidaAinda não há avaliações
- R 07 Robots Page7Documento4 páginasR 07 Robots Page7straf238Ainda não há avaliações
- Bicycle Hazard Lights: Fundamentals of Electronics (Applied Subject)Documento33 páginasBicycle Hazard Lights: Fundamentals of Electronics (Applied Subject)gotlobangAinda não há avaliações
- Arduino Controlled Light DimmerDocumento21 páginasArduino Controlled Light Dimmerrodolfos_8Ainda não há avaliações
- Construction of An Automatic Night LampDocumento10 páginasConstruction of An Automatic Night Lampmekm09Ainda não há avaliações
- Clap SwitchDocumento19 páginasClap SwitchNithin Peter80% (5)
- Clap SwitchDocumento10 páginasClap SwitchNayab Gulzar Hussain100% (2)
- High Power Led Driver CircuitDocumento14 páginasHigh Power Led Driver CircuitVoda LiviuAinda não há avaliações
- 16x2 LCD Relay1 Bluetooth: Arduino Based Underground Cable Fault DetectorDocumento58 páginas16x2 LCD Relay1 Bluetooth: Arduino Based Underground Cable Fault DetectorAnjali NaiduAinda não há avaliações
- Cutter Designs: Until Now!!Documento10 páginasCutter Designs: Until Now!!Eugene FlexAinda não há avaliações
- The Electrolytic Cap ESR Problem, and This MeterDocumento5 páginasThe Electrolytic Cap ESR Problem, and This Meterrichardp3Ainda não há avaliações
- Major Project Report On Laser Torch Based Voice Transmitter and ReceiverDocumento14 páginasMajor Project Report On Laser Torch Based Voice Transmitter and Receiverkunalchoudhry0% (1)
- ComponentsDocumento28 páginasComponentsGyan Swaroop TripathiAinda não há avaliações
- Automatic Emergency TourchDocumento2 páginasAutomatic Emergency TourchchakralabsAinda não há avaliações
- 100 IC CircuitsDocumento60 páginas100 IC CircuitssabAinda não há avaliações
- Automatic Staircase LightningDocumento23 páginasAutomatic Staircase LightningAniket Pawar100% (3)
- R - 11 - Robots Page 11Documento5 páginasR - 11 - Robots Page 11straf238Ainda não há avaliações
- Water Level IndicatorDocumento27 páginasWater Level IndicatorAbhijit PattnaikAinda não há avaliações
- RelayDocumento5 páginasRelayShafiq AmierAinda não há avaliações
- Lab 1 RCDocumento7 páginasLab 1 RCilet09Ainda não há avaliações
- Non-Contact AC Voltage Detector Using TransistorsDocumento28 páginasNon-Contact AC Voltage Detector Using TransistorsH Aries OñaAinda não há avaliações
- Gyrators To Replace PSU ChokesDocumento3 páginasGyrators To Replace PSU Chokeschuongdv100% (2)
- Baumer Product Overview Process Sensors CT en 1509 11148152Documento55 páginasBaumer Product Overview Process Sensors CT en 1509 11148152bnn123Ainda não há avaliações
- SPWM Driver Circuit SchematicDocumento1 páginaSPWM Driver Circuit Schematicbnn123Ainda não há avaliações
- A.2-Constant Current and Constant Voltage RegulatorDocumento25 páginasA.2-Constant Current and Constant Voltage Regulatorbnn123Ainda não há avaliações
- G Ec SM Induction InducsvcDocumento30 páginasG Ec SM Induction Inducsvcbnn123Ainda não há avaliações
- When To Use A Fishbone Diagram: o o o o o oDocumento2 páginasWhen To Use A Fishbone Diagram: o o o o o obnn123Ainda não há avaliações
- Motion and Vector Control PDFDocumento0 páginaMotion and Vector Control PDFbnn123Ainda não há avaliações
- Circuit Diagrams and Component Drawings: EMCH 367 Fundamentals of Microcontrollers 367pck S01Documento11 páginasCircuit Diagrams and Component Drawings: EMCH 367 Fundamentals of Microcontrollers 367pck S01Iwan de AngeloAinda não há avaliações
- Igbt TheoryDocumento2 páginasIgbt Theorybnn123Ainda não há avaliações
- Earthing MythDocumento44 páginasEarthing Mythbookface123Ainda não há avaliações
- V"AJH13: Nunber of Swilchmg Are TrippmgDocumento2 páginasV"AJH13: Nunber of Swilchmg Are TrippmgrizwanAinda não há avaliações
- Acoustic Image - Combos Series III ManualDocumento8 páginasAcoustic Image - Combos Series III ManualazwrazwrAinda não há avaliações
- Technical ManualDocumento151 páginasTechnical ManualGiannis KavathasAinda não há avaliações
- Dyna-100 FBM ManualDocumento8 páginasDyna-100 FBM ManualflorianeverfloAinda não há avaliações
- Interactive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Documento9 páginasInteractive Schematic: This Document Is Best Viewed at A Screen Resolution of 1024 X 768Elie Abisaad100% (1)
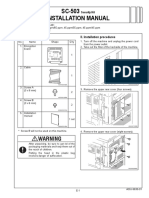
- Installation Manual SC-503: I. Accessory Parts II. Installation ProceduresDocumento6 páginasInstallation Manual SC-503: I. Accessory Parts II. Installation ProcedureshashemAinda não há avaliações
- RENR88270001Documento4 páginasRENR88270001Guido Emanuel SteinbachAinda não há avaliações
- RF Final Project PDFDocumento18 páginasRF Final Project PDFbelay workyeAinda não há avaliações
- 2gb Nand m29b-1879920Documento58 páginas2gb Nand m29b-1879920ManunoghiAinda não há avaliações
- Hydraulic Austoft9900 - ENDocumento146 páginasHydraulic Austoft9900 - ENSugeng Ariyadi100% (1)
- Puma 8.1 B Kit QL 8Documento1 páginaPuma 8.1 B Kit QL 8SaraMeineckeAinda não há avaliações
- Memory Reference Instructions ExecutionDocumento13 páginasMemory Reference Instructions ExecutionAditya Singh100% (1)
- EPB With Preload: Ep B 20 05 - 6 QZ RR G0 +650L C3Documento2 páginasEPB With Preload: Ep B 20 05 - 6 QZ RR G0 +650L C3Radinal Fernandez SimanjuntakAinda não há avaliações
- Catalogo Graco LubricationDocumento184 páginasCatalogo Graco LubricationCarlos Andrés CuelloAinda não há avaliações
- HPR-2Documento12 páginasHPR-2v2nssysy6fAinda não há avaliações
- 17 Termografia de PV Con Flir Tau 640 y Drone PDFDocumento2 páginas17 Termografia de PV Con Flir Tau 640 y Drone PDFOscar ChilcaAinda não há avaliações
- Breaker Size Calculator - ElectricalDocumento6 páginasBreaker Size Calculator - ElectricalUjjal ChakmaAinda não há avaliações
- Riveted JointsDocumento7 páginasRiveted Jointsjimmy mlelwaAinda não há avaliações
- Aerial RopewaysDocumento43 páginasAerial RopewaysAnshul yadavAinda não há avaliações
- Cm200dy-24nf eDocumento4 páginasCm200dy-24nf eWesamAinda não há avaliações
- M Freja300Documento10 páginasM Freja300Krishna MoorthiAinda não há avaliações
- ES.2.14.0035 LV Cage Induction MotorsDocumento54 páginasES.2.14.0035 LV Cage Induction MotorsAhmed FayedAinda não há avaliações
- Chapter 25 Equipment - FurnishingDocumento63 páginasChapter 25 Equipment - FurnishingHartomo DK.Ainda não há avaliações
- Common Washing Machine Error Codes - Samsung IndiaDocumento6 páginasCommon Washing Machine Error Codes - Samsung IndiaRyan KadavilAinda não há avaliações
- RS1117Documento10 páginasRS1117asismamenAinda não há avaliações