Você também pode gostar
- Catalogo de Partes, Repuestos y Componentes de JeepDocumento122 páginasCatalogo de Partes, Repuestos y Componentes de Jeeppoketupi100% (8)
- Cómo Se Calcula El Ancho de BandaDocumento2 páginasCómo Se Calcula El Ancho de BandaCarmen LozanoAinda não há avaliações
- Mónica Correia Astrología AntarakanaDocumento301 páginasMónica Correia Astrología AntarakanaAndrea Sosa100% (3)
- Arte Sumerio (Resumen)Documento12 páginasArte Sumerio (Resumen)Luisfer MonroyAinda não há avaliações
- Evaluación. Pupi y Los FantasmasDocumento4 páginasEvaluación. Pupi y Los FantasmasAna Cecilia Alarcón MonteroAinda não há avaliações
- Tecnicas AnsiedadDocumento13 páginasTecnicas Ansiedadjosadri0592Ainda não há avaliações
- Tecnicas AnsiedadDocumento13 páginasTecnicas Ansiedadjosadri0592Ainda não há avaliações
- Tema 13 Los Límites Del Conocimiento HumanoDocumento5 páginasTema 13 Los Límites Del Conocimiento HumanoJorge Julio GorostiagaAinda não há avaliações
- Educar en y para El ConflictoDocumento38 páginasEducar en y para El ConflictoMaría Julia OliveraAinda não há avaliações
- Manual de Procedimiento Parlamentario-Book-prDocumento123 páginasManual de Procedimiento Parlamentario-Book-prpoketupi100% (1)
- Vision Integral Del Desarrollo Social Humano-OnUDocumento27 páginasVision Integral Del Desarrollo Social Humano-OnUpoketupiAinda não há avaliações
- Utilizacion de Crucigramas en La Educacion A DistanciaDocumento9 páginasUtilizacion de Crucigramas en La Educacion A DistanciapoketupiAinda não há avaliações
- El Transporte Ferroviario en BrasilDocumento47 páginasEl Transporte Ferroviario en BrasilpoketupiAinda não há avaliações
- Taller de Calculo de Nomina y Salarios-VeDocumento144 páginasTaller de Calculo de Nomina y Salarios-Vepoketupi100% (1)
- Calificacion y Certificacion de DiscapacidadDocumento6 páginasCalificacion y Certificacion de DiscapacidadpoketupiAinda não há avaliações
- Desmitificando La Rentabilidad Social Del TAVDocumento25 páginasDesmitificando La Rentabilidad Social Del TAVpoketupiAinda não há avaliações
- Introduccion A Las CriptomonedasDocumento8 páginasIntroduccion A Las CriptomonedaspoketupiAinda não há avaliações
- Manual Adquisicion Bienes IicaDocumento84 páginasManual Adquisicion Bienes IicarobertoAinda não há avaliações
- Modelo de Simulacion de Operaciones en Aeropuertos Saturados-AICM-mex PDFDocumento108 páginasModelo de Simulacion de Operaciones en Aeropuertos Saturados-AICM-mex PDFpoketupiAinda não há avaliações
- Aplicación Tecnología en LogísticaDocumento99 páginasAplicación Tecnología en LogísticaPaniaguaAinda não há avaliações
- Plan de Implantación Del Sistema de Navegación para La Región SAM-RadioAyudas-OACIDocumento34 páginasPlan de Implantación Del Sistema de Navegación para La Región SAM-RadioAyudas-OACIpoketupiAinda não há avaliações
- Dialnet LasZonasInternacionalesOZonasDeTransitoDeLosAeropu 1143400Documento18 páginasDialnet LasZonasInternacionalesOZonasDeTransitoDeLosAeropu 1143400Tomás AguerreAinda não há avaliações
- Aspectos Juridicos de La Creacion de Aeropuertos-EsDocumento8 páginasAspectos Juridicos de La Creacion de Aeropuertos-EspoketupiAinda não há avaliações
- OT-014 ESAL 61pDocumento61 páginasOT-014 ESAL 61pJulian Bermudez HernandezAinda não há avaliações
- Enlace Optico No GuiadoDocumento4 páginasEnlace Optico No Guiadoing_rogercc4528Ainda não há avaliações
- Orientacion Del Gasto en LatAm-InDESDocumento44 páginasOrientacion Del Gasto en LatAm-InDESpoketupiAinda não há avaliações
- TeleTrabajo-Qué Internet Necesita para Trabajar Desde Su HogarDocumento26 páginasTeleTrabajo-Qué Internet Necesita para Trabajar Desde Su HogarpoketupiAinda não há avaliações
- Placido, Domingo - Los Modos de Producción y Las Transformaciones Del Mundo ClásicoDocumento10 páginasPlacido, Domingo - Los Modos de Producción y Las Transformaciones Del Mundo ClásicoJaime PeñaililloAinda não há avaliações
- Calculo de BTUDocumento9 páginasCalculo de BTURolando Maulén Olave100% (1)
- Compendio de Electronica I - I.O.S.Documento259 páginasCompendio de Electronica I - I.O.S.Jc Ortiz Glez100% (1)
- Entorno de Simulación para Verificación y Validación de Equipamiento CBTCDocumento8 páginasEntorno de Simulación para Verificación y Validación de Equipamiento CBTCpoketupiAinda não há avaliações
- Moreno, Nahuel - Lógica Marxista y Ciencias Modernas (1973)Documento58 páginasMoreno, Nahuel - Lógica Marxista y Ciencias Modernas (1973)rebeldemule2Ainda não há avaliações
- Mas Alla - William UryDocumento5 páginasMas Alla - William UryArgenis V BallardAinda não há avaliações
- Script My ProjectDocumento6 páginasScript My ProjectAlba Corrales FinaAinda não há avaliações
- Control Interno Nuevo HorizonteDocumento2 páginasControl Interno Nuevo HorizonteDiego AlexanderAinda não há avaliações
- Conjuntos #1.1Documento2 páginasConjuntos #1.1Naya RoaAinda não há avaliações
- RIESCO CHUECA P (main res.); ALCÁNTARA J; CÁCERES CLAVERO F; DIAZ IGLESIAS JM; GUISLANZONI M; GÓMEZ ZOTANO J; GUERRERO ÁLVAREZ JJ; MOREIRA MADUEÑO JM; RAMÍREZ RAMÍREZ A; RODRÍGUEZ RODRÍGUEZ J; ZOIDO NARANJO F (ed.) (2014) Bases paisaje Andalucía SCIPA. Aplicac. a Sierra Morena. Junta de Andalucía.Documento536 páginasRIESCO CHUECA P (main res.); ALCÁNTARA J; CÁCERES CLAVERO F; DIAZ IGLESIAS JM; GUISLANZONI M; GÓMEZ ZOTANO J; GUERRERO ÁLVAREZ JJ; MOREIRA MADUEÑO JM; RAMÍREZ RAMÍREZ A; RODRÍGUEZ RODRÍGUEZ J; ZOIDO NARANJO F (ed.) (2014) Bases paisaje Andalucía SCIPA. Aplicac. a Sierra Morena. Junta de Andalucía.Pascual RIESCO CHUECAAinda não há avaliações
- Respiracion Yfotosíntesis en ElodeaDocumento4 páginasRespiracion Yfotosíntesis en ElodeamarihvibeAinda não há avaliações
- Amicus Curiae Ante El Tribunal Constitucional Plurinacional de BoliviaDocumento11 páginasAmicus Curiae Ante El Tribunal Constitucional Plurinacional de BoliviaGiremxAinda não há avaliações
- Programa Escuela Con Las Familias Propuesta FinalDocumento9 páginasPrograma Escuela Con Las Familias Propuesta FinalNaillit AlvarezAinda não há avaliações
- Niebla en AgostoDocumento2 páginasNiebla en AgostoDon LopezAinda não há avaliações
- Guia de Estudio Enfermeria PropedeuticaDocumento8 páginasGuia de Estudio Enfermeria PropedeuticaVILLMARAinda não há avaliações
- Tabla Especificaciones Ensayo SimceDocumento3 páginasTabla Especificaciones Ensayo Simceloreto moralesAinda não há avaliações
- ? ?????? ?? ????????? ??????? ??? ?????????Documento252 páginas? ?????? ?? ????????? ??????? ??? ?????????Pablo riveraAinda não há avaliações
- tp1 MediacionDocumento11 páginastp1 MediacionAlejandro Nicolas Ciuffo FrattaroliAinda não há avaliações
- Diapositivas SustentacionDocumento116 páginasDiapositivas SustentacionJean Franco Quispe FelicesAinda não há avaliações
- Vuelta A Matusalen - ShawDocumento164 páginasVuelta A Matusalen - ShawFernandoAinda não há avaliações
- Fundamentos Del Matrimonio FelizDocumento5 páginasFundamentos Del Matrimonio FelizHRBT_66Ainda não há avaliações
- Intervalos Operadores de PrecedenciaDocumento14 páginasIntervalos Operadores de PrecedenciaAliñ Peña Colunga100% (1)
- Formato AC (CLUNI)Documento18 páginasFormato AC (CLUNI)María José Castillo OsorioAinda não há avaliações
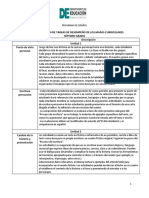
- Tareas Séptimo GradoDocumento4 páginasTareas Séptimo Gradodanaide31Ainda não há avaliações
- Programacion Anual y Bimestral 4to Grado SecunDocumento21 páginasProgramacion Anual y Bimestral 4to Grado SecunLucero Criollo abadAinda não há avaliações
- RepasoDocumento2 páginasRepasoMaria ZurloAinda não há avaliações
- Desarrollos Psicológicos Contemporáneos B 2Documento13 páginasDesarrollos Psicológicos Contemporáneos B 2Julio CesarAinda não há avaliações
- AspirinaDocumento10 páginasAspirinajhonatanAinda não há avaliações
- Armaduras Planas (James M. Gere) PDFDocumento41 páginasArmaduras Planas (James M. Gere) PDFAnonymous MOFUFAsnMAinda não há avaliações
- Apuntes Medina Legal - by Shirley C.JDocumento6 páginasApuntes Medina Legal - by Shirley C.JShirley CambindoAinda não há avaliações
- Asilo CanevaroDocumento20 páginasAsilo CanevaroYessenia ReateguiAinda não há avaliações
- Dinastia Habsburgo y BorbonesDocumento3 páginasDinastia Habsburgo y Borbonesantu71% (7)