Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Degree of Electrifi Cation Peak Load of One Household (KW) Portion of Peak Load Per Household P (KW) Degree of Simultaneous Usage G RemarksDocumento10 páginasDegree of Electrifi Cation Peak Load of One Household (KW) Portion of Peak Load Per Household P (KW) Degree of Simultaneous Usage G RemarkskjfenAinda não há avaliações
- Timer Tutorials 555Documento1 páginaTimer Tutorials 555kjfenAinda não há avaliações
- Selo 1Documento26 páginasSelo 1kjfenAinda não há avaliações
- Water Treatments: Steam Water Cycle TreatmentDocumento2 páginasWater Treatments: Steam Water Cycle TreatmentkjfenAinda não há avaliações
- Temperature Monitoring: FaizanDocumento5 páginasTemperature Monitoring: FaizankjfenAinda não há avaliações
- Timer Tutorials 555Documento1 páginaTimer Tutorials 555kjfenAinda não há avaliações
- Timer Tutorials 555Documento1 páginaTimer Tutorials 555kjfenAinda não há avaliações
- Timer Tutorials 555Documento1 páginaTimer Tutorials 555kjfenAinda não há avaliações
- Timer Tutorials 555Documento1 páginaTimer Tutorials 555kjfenAinda não há avaliações
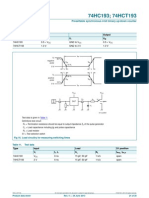
- 74HC193 74HCT193: 14. AbbreviationsDocumento2 páginas74HC193 74HCT193: 14. AbbreviationskjfenAinda não há avaliações
- 74HC193 74HCT193: 13. Package OutlineDocumento2 páginas74HC193 74HCT193: 13. Package OutlinekjfenAinda não há avaliações
- 74HC193 74HCT193: 9. Static CharacteristicsDocumento2 páginas74HC193 74HCT193: 9. Static CharacteristicskjfenAinda não há avaliações
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 páginas74HC193 74HCT193: NXP SemiconductorskjfenAinda não há avaliações
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 páginas74HC193 74HCT193: NXP SemiconductorskjfenAinda não há avaliações
- 74HC193 74HCT193: 10. Dynamic CharacteristicsDocumento2 páginas74HC193 74HCT193: 10. Dynamic CharacteristicskjfenAinda não há avaliações
- 74HC193 74HCT193: 17. Contact InformationDocumento2 páginas74HC193 74HCT193: 17. Contact InformationkjfenAinda não há avaliações
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 páginas74HC193 74HCT193: NXP SemiconductorskjfenAinda não há avaliações
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 páginas74HC193 74HCT193: NXP SemiconductorskjfenAinda não há avaliações
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 páginas74HC193 74HCT193: NXP SemiconductorskjfenAinda não há avaliações
- Physical Dimensions: 14-Lead Plastic Dual-In-Line Package (PDIP), JEDEC MS-001, 0.300" Wide Package Number N14ADocumento1 páginaPhysical Dimensions: 14-Lead Plastic Dual-In-Line Package (PDIP), JEDEC MS-001, 0.300" Wide Package Number N14AkjfenAinda não há avaliações
- 74HC193 74HCT193: NXP SemiconductorsDocumento2 páginas74HC193 74HCT193: NXP SemiconductorskjfenAinda não há avaliações
- 74HC193 74HCT193: 5. Pinning InformationDocumento2 páginas74HC193 74HCT193: 5. Pinning InformationkjfenAinda não há avaliações
- Absolute Maximum Ratings: Symbol Parameter Min Nom Max UnitsDocumento1 páginaAbsolute Maximum Ratings: Symbol Parameter Min Nom Max UnitskjfenAinda não há avaliações
- Ac Switching Characteristics: 5vandtDocumento1 páginaAc Switching Characteristics: 5vandtkjfenAinda não há avaliações
- Function Tables Logic Diagram: BCD Count Sequence (Note 1) Outputs Q Q Q QDocumento1 páginaFunction Tables Logic Diagram: BCD Count Sequence (Note 1) Outputs Q Q Q QkjfenAinda não há avaliações
- 44 A Practical Guide To Geomantic Divination 45 The Presiding GeniusDocumento1 página44 A Practical Guide To Geomantic Divination 45 The Presiding GeniuskjfenAinda não há avaliações
- Geomantic AstrologyDocumento1 páginaGeomantic AstrologykjfenAinda não há avaliações
- Module 1 - IntroductionDocumento7 páginasModule 1 - IntroductionraiAinda não há avaliações
- LeaP Science G6 Weeks1 2 Q3Documento4 páginasLeaP Science G6 Weeks1 2 Q3Mylene VergaraAinda não há avaliações
- IES CONV Electrical Engineering 2000Documento9 páginasIES CONV Electrical Engineering 2000jitenAinda não há avaliações
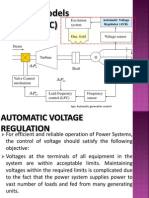
- Automatic Generation ControlDocumento19 páginasAutomatic Generation ControlAjay Talajiya100% (1)
- Kapitulli 1 AnglishtDocumento5 páginasKapitulli 1 AnglishtHalil DemolliAinda não há avaliações
- Single Phase PWM InverterDocumento11 páginasSingle Phase PWM InverterFoom A. Alshekh100% (2)
- Chavda Et Al. (2018) - Force-Time Characteristics of The Countermovement Jump Analyzing The Curve in Excel PDFDocumento35 páginasChavda Et Al. (2018) - Force-Time Characteristics of The Countermovement Jump Analyzing The Curve in Excel PDFalcarazAinda não há avaliações
- Flow Visualization Wind-Tunnel.: 1 ObjectiveDocumento6 páginasFlow Visualization Wind-Tunnel.: 1 ObjectivesusmithaAinda não há avaliações
- Taking The Noise Out of Via-to-Via CouplingDocumento12 páginasTaking The Noise Out of Via-to-Via CouplingAnh Viet NguyenAinda não há avaliações
- No Solution, No Points.: Saint Mary's UniversityDocumento1 páginaNo Solution, No Points.: Saint Mary's UniversityMark Anthony TajonAinda não há avaliações
- Lecture 10 - Corona Discharge LossDocumento12 páginasLecture 10 - Corona Discharge LossAbdul Hisham100% (1)
- CH 27Documento9 páginasCH 27siddharthsrathor04Ainda não há avaliações
- Rock Blasting 16Documento75 páginasRock Blasting 16llllcesarllllAinda não há avaliações
- GZM00214 - Gen DataDocumento8 páginasGZM00214 - Gen Datatua aggrekoAinda não há avaliações
- Chap.6 Motion in The Presence of Resistive Forces: Level: AP Physics Teacher: KimDocumento3 páginasChap.6 Motion in The Presence of Resistive Forces: Level: AP Physics Teacher: KimStevenzel Eala EstellaAinda não há avaliações
- SSS-I-3000 Operation Manual WHIMSDocumento29 páginasSSS-I-3000 Operation Manual WHIMSjtcolladoAinda não há avaliações
- CBSE+9+Umang +gravitation+in+one+shotDocumento115 páginasCBSE+9+Umang +gravitation+in+one+shotDushyant SinghAinda não há avaliações
- BLDC Motor 6 MM: ECX SPEED 6 M BrushlessDocumento1 páginaBLDC Motor 6 MM: ECX SPEED 6 M Brushlesskishan kharelAinda não há avaliações
- Module 1 - Practical Component PDFDocumento7 páginasModule 1 - Practical Component PDFgh ziAinda não há avaliações
- Measurement and Vectors: Vector AdditionDocumento4 páginasMeasurement and Vectors: Vector AdditionMARIE GO ROUNDAinda não há avaliações
- Programmable Onoff Controller: Universal Input, 2 Setpoints, I/V Out VER 13.XXDocumento2 páginasProgrammable Onoff Controller: Universal Input, 2 Setpoints, I/V Out VER 13.XXAndi RafianAinda não há avaliações
- What Is InertiaDocumento50 páginasWhat Is Inertiasulthan_81Ainda não há avaliações
- The Attenuation and Distortion of Travelling WavesDocumento12 páginasThe Attenuation and Distortion of Travelling WavessbuesoAinda não há avaliações
- Magne-Artistic!: Learning Activity SheetDocumento4 páginasMagne-Artistic!: Learning Activity SheetJ-heart Basabas MalpalAinda não há avaliações
- Zelio Time RE1 CatalogDocumento6 páginasZelio Time RE1 Cataloganthony tigerAinda não há avaliações
- Physics Formula SheetDocumento4 páginasPhysics Formula SheetJeriekoNoznomAinda não há avaliações
- Test BankDocumento14 páginasTest BankAhmed aliAinda não há avaliações
- DC and Ac Machinery: Ee2MeDocumento10 páginasDC and Ac Machinery: Ee2MeJay Johnel ManaloAinda não há avaliações
- Lagrangian FormulationDocumento7 páginasLagrangian FormulationAdrian ArasuAinda não há avaliações
- SB40 Series: Instruction ManualDocumento77 páginasSB40 Series: Instruction ManualgalistratAinda não há avaliações