Você também pode gostar
- DIMENSÕES EXTERNAS PAINÉISDocumento1 páginaDIMENSÕES EXTERNAS PAINÉISPaulo TybinkovskiAinda não há avaliações
- Motores de Indução Trifásicos: Partida e Circuito EquivalenteDocumento56 páginasMotores de Indução Trifásicos: Partida e Circuito Equivalentedriano22100% (1)
- Sensores Industriais - GabaritoDocumento16 páginasSensores Industriais - GabaritoRicardo Pasquati Pontarolli100% (1)
- Chave de Partida Soft-StarterDocumento44 páginasChave de Partida Soft-StarterMoisés Gomes de Lima100% (1)
- Como calcular e enrolar pequenos indutoresDocumento8 páginasComo calcular e enrolar pequenos indutoresAlexandre Gandra CarvalhoAinda não há avaliações
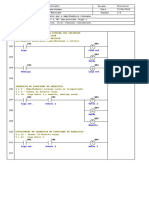
- Programação em Linguagem Ladder de ExercícioDocumento4 páginasProgramação em Linguagem Ladder de ExercícioGustavo HenriqueAinda não há avaliações
- Demanda provável e demanda da instalaçãoDocumento8 páginasDemanda provável e demanda da instalaçãoLucas José de SouzaAinda não há avaliações
- Prática MIT Campo GiranteDocumento4 páginasPrática MIT Campo GiranteNuno HenriquesAinda não há avaliações
- AT1-Planta LeiauteDocumento1 páginaAT1-Planta LeiauteRoberto Paiva100% (1)
- Medidor de resistência de aterramento e resistividade do solo Megabras MTD-20KWDocumento23 páginasMedidor de resistência de aterramento e resistividade do solo Megabras MTD-20KWPollAinda não há avaliações
- Apostila Acionamentos Eletricos 2008 NeemiasDocumento56 páginasApostila Acionamentos Eletricos 2008 NeemiasshadokanAinda não há avaliações
- Máquinas elétricas: exercícios sobre motores de corrente contínuaDocumento4 páginasMáquinas elétricas: exercícios sobre motores de corrente contínuabetoknigthAinda não há avaliações
- Projeto e Análise de Compensadores Por Intemédio Da Resposta em FrequênciaDocumento9 páginasProjeto e Análise de Compensadores Por Intemédio Da Resposta em FrequênciaCavalini Assessoria AcadêmicaAinda não há avaliações
- Instalações Elétricas ResidenciaisDocumento10 páginasInstalações Elétricas ResidenciaisBruno Ramos100% (1)
- Manual Do Inversor de FreqüênciaDocumento152 páginasManual Do Inversor de FreqüênciaRicardo VillasAinda não há avaliações
- TCsDocumento21 páginasTCsMariana Ribeiro GentaAinda não há avaliações
- Formas de associação de resistoresDocumento61 páginasFormas de associação de resistoresJoão Pedro MüllerAinda não há avaliações
- URP6000 URP6001 v2.25 r02 Capítulo 1 ApresentaçãoDocumento13 páginasURP6000 URP6001 v2.25 r02 Capítulo 1 Apresentaçãoalexbozz100% (5)
- AP-04 Multímetro PDFDocumento7 páginasAP-04 Multímetro PDFgodoi2011Ainda não há avaliações
- Contadores AssincronosDocumento30 páginasContadores AssincronosGabriel ConjoAinda não há avaliações
- Projeto elétrico residencial no Revit MEP com template e vídeo aulasDocumento16 páginasProjeto elétrico residencial no Revit MEP com template e vídeo aulasSandro SerafiniAinda não há avaliações
- Apostila de Aula - AUTOCAD 2D PDFDocumento140 páginasApostila de Aula - AUTOCAD 2D PDFRodrigo S. de QuadrosAinda não há avaliações
- Física Geral III: Indução Eletromagnética em Bobinas e TransformadoresDocumento11 páginasFísica Geral III: Indução Eletromagnética em Bobinas e TransformadoresJonatan StraatmannAinda não há avaliações
- 17 - 05 - 05 Caçamba de Fundição EletropneumáticoDocumento1 página17 - 05 - 05 Caçamba de Fundição EletropneumáticoArtur CunhaAinda não há avaliações
- Constantes Generalizadas de Associações de QuadripolosDocumento1 páginaConstantes Generalizadas de Associações de QuadripolosThiago CarvalhoAinda não há avaliações
- Instalação fotovoltaica residencialDocumento1 páginaInstalação fotovoltaica residencialLuis HenriqueAinda não há avaliações
- Light - PADRÃO DE MEDIÇÃO - 125524Documento11 páginasLight - PADRÃO DE MEDIÇÃO - 125524Sergio Henrique S. de Assis100% (1)
- 1510600515ebook - A Nova NBR 5419 PDFDocumento53 páginas1510600515ebook - A Nova NBR 5419 PDFJosé JuniorAinda não há avaliações
- Partida Serie ParaleloDocumento1 páginaPartida Serie ParaleloLuiz Henrique Martins100% (1)
- Partida compensadora de motores elétricosDocumento78 páginasPartida compensadora de motores elétricoscezarvarnier23100% (1)
- Proteção de Sistemas Elétricos: Notas de Aula sobre Proteção e seus PrincípiosDocumento65 páginasProteção de Sistemas Elétricos: Notas de Aula sobre Proteção e seus PrincípiosAlejandro Solis GomezAinda não há avaliações
- Sensor de Tensão ElétricaDocumento18 páginasSensor de Tensão Elétricaalexandre.oneill24790% (1)
- Tabela conversão bitolas fios AWG MCM mm2 ADocumento7 páginasTabela conversão bitolas fios AWG MCM mm2 Aluis.sinatoAinda não há avaliações
- Manual 297Documento20 páginasManual 297renanslivaAinda não há avaliações
- Projeto de sistemas elétricosDocumento7 páginasProjeto de sistemas elétricosNiwtonAinda não há avaliações
- Funções matemáticas em engenhariaDocumento20 páginasFunções matemáticas em engenhariabrunomiranda89Ainda não há avaliações
- Curso Fundamentos Eletricidade IndustrialDocumento10 páginasCurso Fundamentos Eletricidade IndustrialandreluispintoAinda não há avaliações
- Projeto Completo de Um Conversor 12Vcc e 10A Com A Topologia Half-BridgeDocumento89 páginasProjeto Completo de Um Conversor 12Vcc e 10A Com A Topologia Half-BridgeJosé Augusto Coeve Florino100% (1)
- Peletes 18kw PDFDocumento90 páginasPeletes 18kw PDFj3m.marquesAinda não há avaliações
- PUC Filosofias Proteção Aula 12Documento39 páginasPUC Filosofias Proteção Aula 12joaquimsantosfxAinda não há avaliações
- Contatores de potência 3RT10 e acessóriosDocumento2 páginasContatores de potência 3RT10 e acessóriosricboscoAinda não há avaliações
- Geração própria e entrada de energiaDocumento1 páginaGeração própria e entrada de energiaRobson QuinagliaAinda não há avaliações
- Instalações do Alarme HBA-1000Documento2 páginasInstalações do Alarme HBA-1000Leonard Sabbadini50% (4)
- Operação de Interruptores de Carga em MTDocumento14 páginasOperação de Interruptores de Carga em MTcmncmnAinda não há avaliações
- Quadro de distribuição residencial 6ADocumento1 páginaQuadro de distribuição residencial 6ARodolpho Schvandt Ibañes NeresAinda não há avaliações
- Aterramento em redes de distribuição elétricaDocumento18 páginasAterramento em redes de distribuição elétricaroeletricAinda não há avaliações
- Relatório 2 PARTIDA COMPENSADORAintrodução KleberDocumento6 páginasRelatório 2 PARTIDA COMPENSADORAintrodução KleberSaulo Câmara100% (2)
- Sensores industriais: principais tipos e aplicaçõesDocumento23 páginasSensores industriais: principais tipos e aplicaçõesanon_656790980Ainda não há avaliações
- Sensores industriais discretos e interfacesDocumento23 páginasSensores industriais discretos e interfacesseltonjapao0% (1)
- Sensores IndustriaisDocumento23 páginasSensores IndustriaisEduardo CazonAinda não há avaliações
- Wa0001.Documento16 páginasWa0001.Livia TaisAinda não há avaliações
- Hardware DarioDocumento58 páginasHardware DarioLAURO AUGUSTOAinda não há avaliações
- Prática 2Documento9 páginasPrática 2Gabriel MachadoAinda não há avaliações
- Sensores: classificação e característicasDocumento108 páginasSensores: classificação e característicasmichelbruno100% (1)
- Medição de Presença com Sensores e EncoderDocumento5 páginasMedição de Presença com Sensores e EncoderLuana MeloAinda não há avaliações
- ClpcélulaDocumento23 páginasClpcélulaLivia TaisAinda não há avaliações
- aula02eLETRONICAaDQUISICIONDocumento74 páginasaula02eLETRONICAaDQUISICIONmecatronicaferaAinda não há avaliações
- SENSORES PARA CONTROLE DE PROCESSOSDocumento21 páginasSENSORES PARA CONTROLE DE PROCESSOSAdozindo FF7 SASUKEAinda não há avaliações
- Apostila Sensores Conceitos Fundamentais CorrigidoDocumento9 páginasApostila Sensores Conceitos Fundamentais CorrigidoMarcos TononAinda não há avaliações
- Manual Operador Magic DoorDocumento20 páginasManual Operador Magic DoorNixon ErickAinda não há avaliações
- Step 7Documento41 páginasStep 7nilsonery100% (3)
- Modbus ManualDocumento54 páginasModbus Manualnilsonery100% (1)
- Treinamento em Redes de Automacao - Petrobras - Parte 1Documento71 páginasTreinamento em Redes de Automacao - Petrobras - Parte 1nilsonery100% (3)
- Apostilas de Eletronica e Informática - TransformadoresDocumento3 páginasApostilas de Eletronica e Informática - Transformadoresafonso_santosAinda não há avaliações
- Introdução Teórica de TransformadoresDocumento9 páginasIntrodução Teórica de TransformadoresEdson Fagundes de BritoAinda não há avaliações
- Plano Diretor Automação FinalDocumento11 páginasPlano Diretor Automação FinalnilsoneryAinda não há avaliações
- Projeto de Automacao de Pocos PetrobrasDocumento29 páginasProjeto de Automacao de Pocos PetrobrasnilsoneryAinda não há avaliações
- Sen Sores 1Documento10 páginasSen Sores 1nilsonery100% (1)
- Semin Rio4 - Fieldbus - Vol 1Documento33 páginasSemin Rio4 - Fieldbus - Vol 1nilsoneryAinda não há avaliações
- NR10 - Segurança em Intalações e Serviços em EletricidadeDocumento21 páginasNR10 - Segurança em Intalações e Serviços em Eletricidadenilsonery100% (1)
- Plc-Curso Slc500 Allen Bradley RockwelDocumento154 páginasPlc-Curso Slc500 Allen Bradley Rockwelnilsonery100% (3)
- Introdução A RoboticaDocumento112 páginasIntrodução A Roboticanilsonery100% (2)
- Programação em LADDERDocumento23 páginasProgramação em LADDERnilsoneryAinda não há avaliações
- Plano Diretor Automação JairDocumento14 páginasPlano Diretor Automação JairnilsoneryAinda não há avaliações
- Apostila de Instrumentação Noções de AutomacaoDocumento28 páginasApostila de Instrumentação Noções de AutomacaoDavid SoaresAinda não há avaliações
- Modelagem e Simulação - Cap5Documento22 páginasModelagem e Simulação - Cap5nilsoneryAinda não há avaliações
- Manual - Bolsa de ValoresDocumento3 páginasManual - Bolsa de ValoresRafael Amaral PereiraAinda não há avaliações
- Equipamentos de RFDocumento66 páginasEquipamentos de RFluizbertini912100% (1)
- Elaboracao Circuitos ImpressosDocumento4 páginasElaboracao Circuitos Impressosnilsonery0% (1)
- Desenho Basico de EletrônicaDocumento67 páginasDesenho Basico de EletrônicanilsoneryAinda não há avaliações
- Manual de Normas ABNT 2007Documento56 páginasManual de Normas ABNT 2007matwsbuenoAinda não há avaliações
- Elaboração de Placa de Circuito ImpressoDocumento12 páginasElaboração de Placa de Circuito ImpressonilsoneryAinda não há avaliações
- Curva Circular HorizontalDocumento3 páginasCurva Circular HorizontalnilsoneryAinda não há avaliações
- Cursofb 5Documento6 páginasCursofb 5nilsoneryAinda não há avaliações
- Field BusDocumento32 páginasField Bussergio_costa_28Ainda não há avaliações
- Curso de Leitura de ProjetosDocumento29 páginasCurso de Leitura de ProjetosJoão Paulo GuimarãesAinda não há avaliações
- Cursfb 44Documento4 páginasCursfb 44nilsoneryAinda não há avaliações
- Cursfb 42Documento14 páginasCursfb 42nilsonery100% (2)
- Cursfb 43Documento14 páginasCursfb 43nilsoneryAinda não há avaliações
- Escotistas em Acao Ramo LobinhoDocumento84 páginasEscotistas em Acao Ramo LobinhoAugusto Jorge SousaAinda não há avaliações
- Conceitos de Composicao FotograficaDocumento3 páginasConceitos de Composicao FotograficaAriane CardosoAinda não há avaliações
- Avaliação 7º Ano - MatemáticaDocumento6 páginasAvaliação 7º Ano - MatemáticaLittle&Heiderich UfbaAinda não há avaliações
- Quadrinhos e Ideologia (Para Efraim RodriguesDocumento2 páginasQuadrinhos e Ideologia (Para Efraim Rodriguesmistermagoo2Ainda não há avaliações
- 13.moderno Pós-1945 - 2020Documento61 páginas13.moderno Pós-1945 - 2020Rafaela SantosAinda não há avaliações
- Folha de Redação - VunespDocumento2 páginasFolha de Redação - VunespLeonasser RodriguesAinda não há avaliações
- Abrindo-se à canalizaçãoDocumento56 páginasAbrindo-se à canalizaçãoJulio Cesar50% (2)
- Template TCC 2015 - Fabiana Provasi SilvaDocumento50 páginasTemplate TCC 2015 - Fabiana Provasi Silvaapi-259573165Ainda não há avaliações
- TABELA COM Intervalo de Notas para Distribuicao de Medalhas OBA E MOBFOG 2023Documento1 páginaTABELA COM Intervalo de Notas para Distribuicao de Medalhas OBA E MOBFOG 2023Thiago Bento PereiraAinda não há avaliações
- Aeekm217 Ava Inter 2.solDocumento8 páginasAeekm217 Ava Inter 2.solLuis SilvaAinda não há avaliações
- SAP ArchiveLink: Bar Code Entry and Display ObjectsDocumento118 páginasSAP ArchiveLink: Bar Code Entry and Display ObjectsOscar FrizziAinda não há avaliações
- NBR14712 - Fls. 1 - 2 - 3 - 4 - 5 - 6 - 7 - 8 - 9 - 10 - 11 - 12 - 13 - 14 - 15 - 16 - 17 - 18 - 19 - 20 - Arquivo para ImpressãoDocumento20 páginasNBR14712 - Fls. 1 - 2 - 3 - 4 - 5 - 6 - 7 - 8 - 9 - 10 - 11 - 12 - 13 - 14 - 15 - 16 - 17 - 18 - 19 - 20 - Arquivo para Impressãocatiroba100% (1)
- 1637323621155,64 - 8419.4º Bimestre - Atividade Avaliativa - Contos AfricanosDocumento3 páginas1637323621155,64 - 8419.4º Bimestre - Atividade Avaliativa - Contos AfricanosRaphael HiraishinAinda não há avaliações
- Regimento 2010 - SESI - Cee Parecer CEE 370.10Documento16 páginasRegimento 2010 - SESI - Cee Parecer CEE 370.10Ravi ChaurasiaAinda não há avaliações
- 1000 DICAS PARA WindowsDocumento129 páginas1000 DICAS PARA WindowsOnecio Araujo RibeiroAinda não há avaliações
- Avaliacao de EstoquesDocumento6 páginasAvaliacao de Estoquesjj_andradeAinda não há avaliações
- Matemática Discreta: Objetos e AplicaçõesDocumento9 páginasMatemática Discreta: Objetos e AplicaçõesUllah Sayyd Muhammad Abdullah BinAinda não há avaliações
- Entre paixões do Outro e do falasserDocumento8 páginasEntre paixões do Outro e do falasserLilian H. YamaguchiAinda não há avaliações
- Movimento circular uniforme e aceleração centrípeta em questões de físicaDocumento6 páginasMovimento circular uniforme e aceleração centrípeta em questões de físicaNicolas Gabriel NinicoAinda não há avaliações
- Atividades sobre substantivosDocumento4 páginasAtividades sobre substantivosFlavianaSantosAinda não há avaliações
- pdf_04628_ingles-8-ordm-ano-2024-professor-webDocumento33 páginaspdf_04628_ingles-8-ordm-ano-2024-professor-webmabyg2017Ainda não há avaliações
- 38a OBM Nível 1 - Problemas de MatemáticaDocumento3 páginas38a OBM Nível 1 - Problemas de MatemáticaBruno LwAinda não há avaliações
- Estratégia Chinesa de Padrões no Gráfico de LinhasDocumento115 páginasEstratégia Chinesa de Padrões no Gráfico de LinhasIleana Guimarães75% (4)
- As nuances da amizade e do amorDocumento4 páginasAs nuances da amizade e do amorMarcus Vinicios P da Silva100% (1)
- Apostila Introdução Ao Blender PDFDocumento11 páginasApostila Introdução Ao Blender PDFemidioquimicaAinda não há avaliações
- Direitos Juventude 18 artigosDocumento2 páginasDireitos Juventude 18 artigosIsaViEnzoAinda não há avaliações
- Plano de Comunicação Terceiro SetorDocumento54 páginasPlano de Comunicação Terceiro SetorIsis Santana100% (1)
- Gerar boletos bancários com o componente FreeBoleto para DelphiDocumento9 páginasGerar boletos bancários com o componente FreeBoleto para DelphiSandoval JoseAinda não há avaliações
- Manual de Crédito RuralDocumento496 páginasManual de Crédito RuralPatricia MinamiAinda não há avaliações
- Guia EFT Básico AutoaplicaçãoDocumento36 páginasGuia EFT Básico AutoaplicaçãoOzânia Silva Santos100% (2)