APPENDIX 2
LAPLACE TRANSFORMS
This appendix presents a short introduction to Laplace transforms, the basic
tool used in analyzing continuous systems in the frequency domain. The
Laplace transform converts linear ordinary differential equations (LODE’s)
into algebraic equations, making them easy to solve for their frequency and
time-domain behavior. There are many excellent presentations of the Laplace
transform, as in Oppenheim [1997], for those who would like more
information.
A2.1 Definitions
The Laplace transform is a generalized Fourier transform, where given any
function f(t), the Fourier transform F(ω) is defined as:
∞
F(ω) = F {f (⋅)} (ω) = ∫ f (t) e
j ωt
dt (A2.1)
−∞
where ω = 2πf and f is frequency, in hz.
In the same spirit, we can define the Laplace transform as:
+∞
F(s) = L {f (⋅)} (s) = ∫ f (t) e
− st
dt (A2.2)
−
0
where s is complex:
s = σ + jω , (A2.3)
σ and ω are real numbers which define the locations of “s” in the complex
plane, see Figure A2.1 below. Also, ω = 2πf as above.
© 2001 by Chapman & Hall/CRC
Im(s)
θ
Re(s)
ωn
Figure A2.1: σ and ω definitions in complex plane.
Remarks:
1) if f (t) ≡ 0 for t < 0 , then
F {f (⋅)} (ω) = L {f (⋅)} ( jω) (A2.4)
2) The “ 0 − ” limit in the Laplace transform definition takes care of
f (t) 's which contain the δ function.
3) The integral in the definition of the Laplace transform need not be
finite, i.e. L {f } (s) may not exist for all s ∈ . However, if f(t)
is bounded by some exponential:
f (t) ≤ M eσ0 t (A2.5)
then L {f } (s) will make sense for s ∈ such that Re {s} > σ0 .
© 2001 by Chapman & Hall/CRC
4) The Laplace transform is linear:
L {a1f1 + a 2 f 2 } = a1L {f1 } + a 2 L {f 2 } (A2.6)
A2.2 Examples, Laplace Transform Table
1) Exponential
f (t) = e − at 1(t)
∞ ∞
1 (A2.7a,b)
F(s) = ∫ e 1(t)e dt =
− at − st
∫e
− (s + a )t
dt = [s > a ]
0− 0−
s+a
2) Impulse
f (t) = δ(t)
∞
(A2.8a,b)
F(s) = ∫ δ(t)e
− st
dt = e−0 = 1 [for any s ]
0−
3) Step
f (t) = 1(t)
∞ − e − s( ∞ ) − e − s(0) 1 (A2.9a,b)
F(s) = ∫ e dt =
− st
= [s > 0 ]
0−
s s
Table A2.1 below contains Laplace transforms for a few selected functions in
the time domain. The “Region of Convergence” or “ROC” is defined as the
range of values of “s” for which the integral in the definition of the Laplace
transform (A2.2) converges (Oppenheim 1997).
© 2001 by Chapman & Hall/CRC
f(t) Laplace Transform Region of Convergence
1) δ(t) 1 all s
2) δ(t − T) e − sT all s
1
3) 1(t) Re {s} > 0
s
1 m 1
4) t 1(t) m +1
Re {s} > 0
m! s
1
5) e − at 1(t) Re {s} > Re {a}
s+a
1 1
6) t m −1e− at 1(t) Re {s} > Re {a}
(m − 1)! (s + a) m
a
7) (1 − e− at )1(t) Re {s} > max {0, Re {a}}
s(s + a)
b−a
8) (e − at − a − bt )1(t) Re {s} > max {Re {a} , Re {b}}
(s + a)(s + b)
a
9) sin(at) 1(t) Re {s} > 0
s2 + a 2
s
10) cos(at)1(t) Re {s} > 0
s + a2
2
b
11) e − at sin(bt)1(t) Re {s} > a
(s + a)2 + b 2
s+a
12) e − at cos(bt)1(t) Re {s} > a
(s + a)2 + b 2
Table A2.1: Laplace transform table.
© 2001 by Chapman & Hall/CRC
A2.3 Duality
The following duality conditions exist:
d
t f (t) ⇔ − F(s)
ds
(A2.10a,b)
d
f (t) ⇔ s F(s)
dt
A2.4 Differentiation and Integration
Differentiation and the Laplace transform: Suppose
L {x} (s) = X(s) (A2.11)
then
L {x& } (s) = sX(s) − x(0 − ) , (A2.12)
so we can interpret “s” as a differentiation operator:
d
↔s (A2.13)
dt
Integration and the Laplace transform: Suppose
L {x} (s) = X(s) , (A2.14)
then
t 1
L ∫ x(τ)dτ (s) = X(s) , (A2.15)
0 s
and we can interpret “1/s” as an integration operator:
t
1
↔ ∫ dt (A2.16)
s 0
© 2001 by Chapman & Hall/CRC
A2.5 Applying Laplace Transforms to LODE’s with Zero Initial
Conditions
Assume we have a linear ordinary differential equation as shown in (A2.17):
y(t) + a1&&
&&& y(t) + a 2 y(t)
& + a 3 y(t) = b1&&
u(t) + b 2 u(t)
& + b3 u(t) (A2.17)
Assume && y(t) = 0, y(t)
& = 0, y(t) = 0 and take the Laplace transform of both
sides, using the linearity property (A2.6):
L {&&&
y} (s) + a1L {&&
y} (s) + a 2 L { y& } (s) + a 3 L { y} (s) =
(A2.18)
b1L {&&
u} (s) + b 2 L {u& } (s) + b 3 L {u} (s)
Recalling that “s” is the differentiation operator, replace “dots” with “s”:
s3 Y(s) + a1s 2 Y(s) + a 2 sY(s) + a 3 Y(s) = b1s 2 U(s) + b 2 sU(s) + b 3 U(s) (A2.19)
We are now left with a polynomial equation in “s” that can be factored into
terms multiplying Y(s) and U(s):
s3 + a1s 2 + a 2 s + a 3 Y(s) = b1s 2 + b 2 s + b3 U(s) (A2.20)
Solving for Y(s):
b1s 2 + b 2 s + b3
Y(s) = U(s) (A2.21)
s3 + a1s 2 + a 2 s + a 3
It can be shown that the terms in the numerator and denominator above are the
Laplace transform of the impulse response, H(s):
Y(s) = H(s)U(s) , (A2.22)
H(s) = L [ h(⋅) ] (s) , (A2.23)
and h(⋅) is the impulse response. For the example LODE (A2.17) the
Laplace transform of the impulse response is:
b1s 2 + b 2 s + b3
H(s) = 3 (A2.24)
s + a1s 2 + a 2 s + a 3
© 2001 by Chapman & Hall/CRC
A2.6 Transfer Function Definition
It can be shown that the transfer function of a system described by a LODE is
the Laplace transform of its impulse response, H(s), (A2.23).
Taking the Laplace transform of the LODE has provided the Laplace
transform of the impulse response. If we could inverse-transform H(s) we
could get the impulse response h(t) without having to integrate the differential
equation. Typically the inverse transform is found by simplifying/expanding
H(s) into terms which can be found in tables, such as Table A2.1, and than
inverting “by inspection.”
A2.7 Frequency Response Definition
Having obtained H(s) directly from the LODE by replacing “dots” by “s,” we
can obtain the frequency response of the system (the Fourier transform of the
impulse response) by substituting “ jω ” for “s” in H(s).
H( jω) = H(s) s = jω (A2.25)
A2.8 Applying Laplace Transforms to LODE’s with Initial Conditions
In A2.5 we looked at applying Laplace transforms to LODE’s with zero initial
conditions, which led to transfer function and frequency response definitions.
Since transfer functions and frequency responses deal with steady state
sinusoidal excitation response of the system, initial conditions are of no
significance, as it is assumed that all measurements of the system undergoing
sinusoidal excitation are taken over a long enough period of time that
transients have died out.
On the other hand, if we are solving for the transient response of a system
defined by a LODE that has initial conditions, obviously the initial conditions
will not be zero. We will use the basic definition of the differentiation
operation from (A2.12) to define the Laplace transform of 1st and 2nd order
differential equations with initial conditions x(0) and x(0)
& :
1st Order: L {x(t)
& } = sX(s) − x(0) (A2.26)
2nd Order: L {&&
x(t)} = s 2 X(s) − sx(0) − x(0)
& (A2.27)
© 2001 by Chapman & Hall/CRC
A2.9 Applying Laplace Transform to State Space
We defined the form of state space equations in Chapter 5 as below:
x& (t) = Ax(t) + Bu(t) (A2.28)
y (t) = Cx(t) + Du(t) (A2.29)
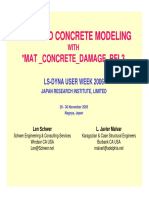
where the initial conditions are set by x(0) = xo . The general block diagram
for a SISO state space system is shown in Figure A2.1.
Direct
Transmission
Matrix
Input Matrix Integrator Block Output Matrix
x(t)
& x(t)
u(t)
Input
B +
∫I C + y(t)
Output
System Matrix
scalar
A vector
Figure A2.1: State space block diagram.
Taking Laplace transform of (A2.28):
L {x& } (s) = L { Ax} (s) + L {Bu} (s)
sX(s) − x(0− ) = AL {x} (s) + BL {u} (s) (A2.30a,b)
= AX(s) + BU(s)
Solving for X(s):
sX(s) − AX(s) = x(0 − ) + BU(s)
(sI − A ) X(s) = x(0− ) + BU(s) (A2.31a,b,c)
−1 − −1
X(s) = (sI − A) x(0 ) + (sI − A ) BU(s)
© 2001 by Chapman & Hall/CRC
The two terms on the right-hand side of (A2.31c) have special significance:
1) (sI − A )−1 x(0 − ) is the Laplace transform of the homogeneous
solution, the initial condition response.
2) (sI − A )−1 BU(s) is the Laplace transform of the particular
solution, the forced response.
Taking the Laplace transform of (A2.29), the output equation:
Y (s) = CX(s) + DU(s) (A2.32)
Knowing X(s) from (A2.31c) and substituting in (A2.32):
Y (s) = C(sI − A )−1 x(0 − ) + C(sI − A )−1 B + D U(s) (A2.33)
If the initial conditions are zero, x(0 − ) = 0 , then
Y (s) = C(sI − A ) −1 B + D U(s) , (A2.34)
with the transfer function for the system being defined by H(s):
H (s) = C(sI − A )−1 B + D (A2.35)
When the terms in H(s) above are multiplied out, they will result in the
following polynomial form:
b(s)
H (s) = +D (A2.36)
a(s)
© 2001 by Chapman & Hall/CRC
Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Oasis 360 Overview 0710Documento21 páginasOasis 360 Overview 0710mychar600% (1)
- Moparm Action - December 2014 USADocumento100 páginasMoparm Action - December 2014 USAenricoioAinda não há avaliações
- Procurement Audit PlanDocumento12 páginasProcurement Audit PlanMustafa Bilal100% (1)
- Gowtham Kumar Chitturi - HRMS Technical - 6 YrsDocumento4 páginasGowtham Kumar Chitturi - HRMS Technical - 6 YrsAnuAinda não há avaliações
- Safety Inspection Checklist Project: Location: Inspector: DateDocumento2 páginasSafety Inspection Checklist Project: Location: Inspector: Dateyono DaryonoAinda não há avaliações
- CasesDocumento4 páginasCasesNaveen Stephen LoyolaAinda não há avaliações
- Bharat Heavy Electricals LimitedDocumento483 páginasBharat Heavy Electricals LimitedRahul NagarAinda não há avaliações
- Harga H2H Pula-Paket Data - Saldo EWallet v31012022Documento10 páginasHarga H2H Pula-Paket Data - Saldo EWallet v31012022lala cemiAinda não há avaliações
- Kit 2: Essential COVID-19 WASH in SchoolDocumento8 páginasKit 2: Essential COVID-19 WASH in SchooltamanimoAinda não há avaliações
- Is 10719 (Iso 1302) - 1Documento1 páginaIs 10719 (Iso 1302) - 1Svapnesh ParikhAinda não há avaliações
- Hyundai Himap BcsDocumento22 páginasHyundai Himap BcsLim Fung ChienAinda não há avaliações
- TokyoDocumento6 páginasTokyoMarcio BonziniAinda não há avaliações
- DPC SEMESTER X B Project ListDocumento2 páginasDPC SEMESTER X B Project ListVaibhav SharmaAinda não há avaliações
- Saic-M-2012 Rev 7 StructureDocumento6 páginasSaic-M-2012 Rev 7 StructuremohamedqcAinda não há avaliações
- WWW - Manaresults.co - In: Internet of ThingsDocumento3 páginasWWW - Manaresults.co - In: Internet of Thingsbabudurga700Ainda não há avaliações
- I5386-Bulk SigmaDocumento1 páginaI5386-Bulk SigmaCleaver BrightAinda não há avaliações
- T&B Detailed Plan: Ceiling LineDocumento1 páginaT&B Detailed Plan: Ceiling LineKuthbert NoceteAinda não há avaliações
- Freqinv 3g3fv Ds 01oct2000Documento20 páginasFreqinv 3g3fv Ds 01oct2000Mohd Abu AjajAinda não há avaliações
- Channel System: Presented byDocumento78 páginasChannel System: Presented bygrace22mba22Ainda não há avaliações
- INTERNATIONAL BUSINESS DYNAMIC (Global Operation MGT)Documento7 páginasINTERNATIONAL BUSINESS DYNAMIC (Global Operation MGT)Shashank DurgeAinda não há avaliações
- Relationship Between Principal Leadership Skills and Teachers' Organizational Citizenship BehaviourDocumento16 páginasRelationship Between Principal Leadership Skills and Teachers' Organizational Citizenship BehaviourToe ToeAinda não há avaliações
- Ahakuelo IndictmentDocumento24 páginasAhakuelo IndictmentHNNAinda não há avaliações
- SEBI Circular Dated 22.08.2011 (Cirmirsd162011)Documento3 páginasSEBI Circular Dated 22.08.2011 (Cirmirsd162011)anantAinda não há avaliações
- Simplified Concrete Modeling: Mat - Concrete - Damage - Rel3Documento14 páginasSimplified Concrete Modeling: Mat - Concrete - Damage - Rel3amarAinda não há avaliações
- ACC403 Week 10 Assignment Rebecca MillerDocumento7 páginasACC403 Week 10 Assignment Rebecca MillerRebecca Miller HorneAinda não há avaliações
- 6mm Superlite 70 40t Clear +16as+6mm ClearDocumento1 página6mm Superlite 70 40t Clear +16as+6mm ClearNav JavAinda não há avaliações
- Relay Interface ModulesDocumento2 páginasRelay Interface Modulesmahdi aghamohamadiAinda não há avaliações
- 19-2 Clericis LaicosDocumento3 páginas19-2 Clericis LaicosC C Bờm BờmAinda não há avaliações
- 7373 16038 1 PBDocumento11 páginas7373 16038 1 PBkedairekarl UNHASAinda não há avaliações
- bz4x EbrochureDocumento21 páginasbz4x EbrochureoswaldcameronAinda não há avaliações