Você também pode gostar
- SignatureDocumento6 páginasSignatureeduardocasiAinda não há avaliações
- COUTURAT Algebra of LogicDocumento102 páginasCOUTURAT Algebra of LogicjaviquicAinda não há avaliações
- Choosing Snubber Caps ValueDocumento13 páginasChoosing Snubber Caps ValueLow Hsien MengAinda não há avaliações
- Introduction To Transistors.Documento15 páginasIntroduction To Transistors.nabeel hassan aliAinda não há avaliações
- Algorithms For Computing Approximate Nash Equilibria: Vangelis MarkakisDocumento38 páginasAlgorithms For Computing Approximate Nash Equilibria: Vangelis MarkakiseduardocasiAinda não há avaliações
- Intro To Spread SpectrumDocumento10 páginasIntro To Spread SpectrumOm Krishna PatelAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Hbuster Hbd9700 SMDocumento52 páginasHbuster Hbd9700 SMFernando CostaAinda não há avaliações
- ToRs For - Nyamugasani GFS - 0Documento41 páginasToRs For - Nyamugasani GFS - 0pepegrillo891Ainda não há avaliações
- Elctrical Safety PaperV3 1Documento6 páginasElctrical Safety PaperV3 120082012Ainda não há avaliações
- 2021-Internal Combustion Engines and Biofuels ExaminingDocumento16 páginas2021-Internal Combustion Engines and Biofuels ExaminingJ VAinda não há avaliações
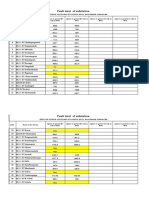
- Fault Level of SubstationDocumento2 páginasFault Level of SubstationrtadAinda não há avaliações
- 10th Social EM - 2nd Revision Test 2022 Model Question Paper 3 - English Medium PDF DownloadDocumento2 páginas10th Social EM - 2nd Revision Test 2022 Model Question Paper 3 - English Medium PDF DownloadGR DesignsAinda não há avaliações
- MP EM Ass 12: DC CircuitsDocumento10 páginasMP EM Ass 12: DC CircuitsBlueAstroAinda não há avaliações
- Flatpack2 HE 48V 3000W v2Documento2 páginasFlatpack2 HE 48V 3000W v2Vinícius Dias Giribola100% (1)
- ECE 340 Lecture 26: Reverse Bias Breakdown: Class OutlineDocumento20 páginasECE 340 Lecture 26: Reverse Bias Breakdown: Class OutlineDao ZhangAinda não há avaliações
- 0411 001Documento8 páginas0411 001None None NoneAinda não há avaliações
- 1MNS500222-AAAC - 33kV FEEDER-2019-05-15 PDFDocumento75 páginas1MNS500222-AAAC - 33kV FEEDER-2019-05-15 PDFBishnu RegmiAinda não há avaliações
- Benefits of Solar EnergyDocumento22 páginasBenefits of Solar EnergyVinith GopalakrishnanAinda não há avaliações
- Chapter 5.1 Guided ReadingDocumento2 páginasChapter 5.1 Guided ReadingEllie HenryAinda não há avaliações
- Types of NoiseDocumento12 páginasTypes of NoiseSajith Chandran ReoAinda não há avaliações
- CAT 3126 Parts Manuals PDFDocumento1.040 páginasCAT 3126 Parts Manuals PDFDavid B100% (5)
- Solar TrackingDocumento18 páginasSolar Trackingkoti519100% (1)
- AS5780-Core Requirement Specification For Aircraft Gas Turbine Engine LubricantsDocumento9 páginasAS5780-Core Requirement Specification For Aircraft Gas Turbine Engine LubricantsJicheng PiaoAinda não há avaliações
- WP310LDocumento109 páginasWP310Ljohn smithAinda não há avaliações
- BOOK-CRC-2001-Chemcal Properties of Material Surfaces - M. KosmulskiDocumento762 páginasBOOK-CRC-2001-Chemcal Properties of Material Surfaces - M. KosmulskiQiang SunAinda não há avaliações
- 2012 SpiraxialDocumento1 página2012 SpiraxialNistha ChakrabortyAinda não há avaliações
- Sewage Sludge CombustionDocumento62 páginasSewage Sludge CombustionJoão Diego FeitosaAinda não há avaliações
- Evaluation of Convective Heat Transfer and Natural Circulation in An Evacuated Tube Solar CollectorDocumento16 páginasEvaluation of Convective Heat Transfer and Natural Circulation in An Evacuated Tube Solar CollectorMustafa Jasim0% (1)
- Conceptual Design of Planetary Gearbox System ForDocumento11 páginasConceptual Design of Planetary Gearbox System ForAthoriq Dias MuyasarAinda não há avaliações
- Fire Prevention and Fire Fighting 2. Proficiency in Personal Survival Techniques 3. Personal Safety and Social Responsibilities 4. Elementary First AidDocumento107 páginasFire Prevention and Fire Fighting 2. Proficiency in Personal Survival Techniques 3. Personal Safety and Social Responsibilities 4. Elementary First AidSun Htoo MyintAinda não há avaliações
- Contents Electronic Circuits For AllDocumento8 páginasContents Electronic Circuits For AllmoiAinda não há avaliações
- HERAcell 150i 240i With Decontamination Routine PDFDocumento156 páginasHERAcell 150i 240i With Decontamination Routine PDFdeepthiAinda não há avaliações
- Generation Transmission and DistributionDocumento137 páginasGeneration Transmission and Distributionsathya2040Ainda não há avaliações
- MCEN7221 SlidesDocumento240 páginasMCEN7221 SlidesVladJAinda não há avaliações
- Overfill - Valve - 442B Size 4Documento3 páginasOverfill - Valve - 442B Size 4j8164322Ainda não há avaliações
- RA Series Transfer Switches: FeaturesDocumento4 páginasRA Series Transfer Switches: FeaturesJose RomeroAinda não há avaliações