Você também pode gostar
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNo EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsAinda não há avaliações
- Design of A Real-Time Inspection System For NDE of Reactor Vessels and Piping ComponentsDocumento25 páginasDesign of A Real-Time Inspection System For NDE of Reactor Vessels and Piping Componentsddaalayamoct313024Ainda não há avaliações
- Imtc.1996.microcontroller-Based Measurement of Angular Position, Velocity and AccelerationDocumento5 páginasImtc.1996.microcontroller-Based Measurement of Angular Position, Velocity and AccelerationBorislavAinda não há avaliações
- A New Method of Voltage Sag and Swell Detection: Raj Naidoo, Member, IEEE, and Pragasen Pillay, Fellow, IEEEDocumento8 páginasA New Method of Voltage Sag and Swell Detection: Raj Naidoo, Member, IEEE, and Pragasen Pillay, Fellow, IEEEjcrodriguez83Ainda não há avaliações
- (TP0V001) Theory and Application of Pulse Lnterpolation To Prover SystemsDocumento6 páginas(TP0V001) Theory and Application of Pulse Lnterpolation To Prover SystemsRoberto Carlos Teixeira100% (1)
- Tap ChangerDocumento10 páginasTap ChangerusefiAinda não há avaliações
- Iscas06 Random SamplingDocumento4 páginasIscas06 Random SamplingJaswinder Pal BehlAinda não há avaliações
- Phase-Measurement Interferometry TechniquesDocumento50 páginasPhase-Measurement Interferometry TechniquesAlex ZentenoAinda não há avaliações
- Multi-Phase-Center IFSAR: Sandia ReportDocumento46 páginasMulti-Phase-Center IFSAR: Sandia Reportsandia_docsAinda não há avaliações
- Digital Multi-Channel High Resolution Phase Locked Loop Under in Uence of Potential System UncertaintiesDocumento7 páginasDigital Multi-Channel High Resolution Phase Locked Loop Under in Uence of Potential System Uncertaintiesservice infoAinda não há avaliações
- Application of Wavelet Transform For Fault Diagnosis in Rotating MachineryDocumento6 páginasApplication of Wavelet Transform For Fault Diagnosis in Rotating MachinerySaeed JavdaniAinda não há avaliações
- Wavelet TransformDocumento6 páginasWavelet TransformRendi Kurnia JammiAinda não há avaliações
- Rethore EOW09Documento10 páginasRethore EOW09pierre_elouanAinda não há avaliações
- Program For The Detection and Diagnosis of Broken Rotor Bars in Squirrel-Cage MotorsDocumento6 páginasProgram For The Detection and Diagnosis of Broken Rotor Bars in Squirrel-Cage MotorsLeo ArguijoAinda não há avaliações
- Using Time WaveformDocumento5 páginasUsing Time WaveformfranksuaiAinda não há avaliações
- ! Deep Learning Application of Vibration Data For Predictive Maintenance of Gravity Acceleration EquipmentDocumento15 páginas! Deep Learning Application of Vibration Data For Predictive Maintenance of Gravity Acceleration Equipmentهندسة الإنتاج والتصميم الميكانيكيAinda não há avaliações
- Stepped Hulls - Feb07Documento13 páginasStepped Hulls - Feb07JuniorJavier Olivo FarreraAinda não há avaliações
- Outlier Generation and Anomaly Detection Based On Intelligent One-Class Techniques Over A Bicomponent Mixing SystemDocumento12 páginasOutlier Generation and Anomaly Detection Based On Intelligent One-Class Techniques Over A Bicomponent Mixing SystemHECTOR COCHISE TERAN HERRERAAinda não há avaliações
- Steel Catenary Risers - Allegheny Offshore Viv Monitoring Campaign and Large Scale Simulation of Seabed InteractionDocumento14 páginasSteel Catenary Risers - Allegheny Offshore Viv Monitoring Campaign and Large Scale Simulation of Seabed InteractiongenmikAinda não há avaliações
- Toma de Informacion Cualitativa para ProcesosDocumento6 páginasToma de Informacion Cualitativa para Procesosvictorpalacio19Ainda não há avaliações
- Energy COnDocumento6 páginasEnergy COnStuart BradleyAinda não há avaliações
- Cyclic Sources Extraction From Complex Multiple-Component VibrationDocumento12 páginasCyclic Sources Extraction From Complex Multiple-Component VibrationAbdelkader RabahAinda não há avaliações
- On-Line Current Monitoring To Diagnose Airgap Eccentricity - An Industrial Case History of A Large High Voltage Three Phase Induction MotorDocumento3 páginasOn-Line Current Monitoring To Diagnose Airgap Eccentricity - An Industrial Case History of A Large High Voltage Three Phase Induction MotorJairo CorimanyaAinda não há avaliações
- Computed Order Tracking Applied To Vibration Analysis of Rotating MachineryDocumento2 páginasComputed Order Tracking Applied To Vibration Analysis of Rotating MachineryJulio Pacheco BarraAinda não há avaliações
- Advancements in Adaptive Algorithms For Secure High-Speed Distance ProtectionDocumento12 páginasAdvancements in Adaptive Algorithms For Secure High-Speed Distance ProtectionM Adnan AshrafAinda não há avaliações
- Computers & Chemical EngineeringDocumento4 páginasComputers & Chemical Engineeringamin110110Ainda não há avaliações
- Wavelet Based DVR FOR POWER QUALITY IMPROVEMENTDocumento7 páginasWavelet Based DVR FOR POWER QUALITY IMPROVEMENTpardhu_y4Ainda não há avaliações
- Analysis of High Speed Natural Gas Engine Valve Vibrations Using Statistical MethodsDocumento16 páginasAnalysis of High Speed Natural Gas Engine Valve Vibrations Using Statistical MethodsM.Hassan AliAinda não há avaliações
- Mew Optical Sensor For Measuring The Velocity of Webs by CorrelationtechniquesDocumento5 páginasMew Optical Sensor For Measuring The Velocity of Webs by CorrelationtechniquesMiguel Angel Alvarez BoreaAinda não há avaliações
- Count Rate Performance and Deadtime Analysis of The New 3D PETRRA PET CameraDocumento11 páginasCount Rate Performance and Deadtime Analysis of The New 3D PETRRA PET CameraWiebke AndrénAinda não há avaliações
- Implementation of Preventive Diagnostics MeasuresDocumento5 páginasImplementation of Preventive Diagnostics MeasuresPhilippe GayetAinda não há avaliações
- 2022-Novel Stuck Pipe Troubles Prediction Model Using Reinforcement LearningDocumento9 páginas2022-Novel Stuck Pipe Troubles Prediction Model Using Reinforcement Learningsobhan mohammadiAinda não há avaliações
- United States Naval Academy: Division ofDocumento13 páginasUnited States Naval Academy: Division ofdrdinglechengAinda não há avaliações
- Enhancement of Islanding-Detection of Distributed Generation Systems Via Wavelet TransformDocumento6 páginasEnhancement of Islanding-Detection of Distributed Generation Systems Via Wavelet TransformawhanAinda não há avaliações
- 049 FrankDocumento12 páginas049 FrankMaroknightAinda não há avaliações
- Control & Instrumentation Volume 2Documento119 páginasControl & Instrumentation Volume 2Ramachandran Marappan100% (1)
- Cpe400L 09 Experiment 9Documento25 páginasCpe400L 09 Experiment 9KirubaKaran SAinda não há avaliações
- Microprocessor and Microcontroller Lab: Experiments PerformedDocumento51 páginasMicroprocessor and Microcontroller Lab: Experiments PerformedadityaAinda não há avaliações
- Automated Drilling Algorithms ImplementationDocumento11 páginasAutomated Drilling Algorithms ImplementationnanlingjigongAinda não há avaliações
- The Design of A Simple Asynchronous ProcessorDocumento6 páginasThe Design of A Simple Asynchronous ProcessorRashika MadanAinda não há avaliações
- Fluid Accelerations Under Irregural WavesDocumento12 páginasFluid Accelerations Under Irregural WavesYoungtae KimAinda não há avaliações
- Using Short-Time Fourier Transform in MachineryDocumento8 páginasUsing Short-Time Fourier Transform in MachineryhendranatjAinda não há avaliações
- Esc Pecr 14 - 12 - 2022Documento13 páginasEsc Pecr 14 - 12 - 2022Luis CandoAinda não há avaliações
- Piston - Prover - Quadruple - Timing - Pulse - InterpolationDocumento3 páginasPiston - Prover - Quadruple - Timing - Pulse - InterpolationTest_7890Ainda não há avaliações
- Flow Measurement 2001 - International Conference - Creating Efficiency Across Industry SectorsDocumento13 páginasFlow Measurement 2001 - International Conference - Creating Efficiency Across Industry SectorsSArulManojAinda não há avaliações
- Stress Tests For Dynamic Burn-In of Full Scan Circuits: VPD, Sreejit @cs - Buffalo.eduDocumento21 páginasStress Tests For Dynamic Burn-In of Full Scan Circuits: VPD, Sreejit @cs - Buffalo.edusatheesh8487Ainda não há avaliações
- CT Saturation 1Documento6 páginasCT Saturation 111389Ainda não há avaliações
- Integrity Test of PileDocumento5 páginasIntegrity Test of PileDae Yeol KimAinda não há avaliações
- Adaptive Application of Impedance Estimation Algorithms in Distance RelayingDocumento6 páginasAdaptive Application of Impedance Estimation Algorithms in Distance Relayingsirisiri100Ainda não há avaliações
- High Speed Numerical Techniques For Transmission Line ProtectionDocumento4 páginasHigh Speed Numerical Techniques For Transmission Line ProtectionFabrício CoelhoAinda não há avaliações
- What Is Particle Image Velocimetry?Documento9 páginasWhat Is Particle Image Velocimetry?riemanndiskAinda não há avaliações
- Scheduling Strategy For Real-Time Distributed Systems: Journal of Applied Research and TechnologyDocumento9 páginasScheduling Strategy For Real-Time Distributed Systems: Journal of Applied Research and TechnologyGabriel Moreno BustamanteAinda não há avaliações
- 2 Holter Basado en MicropDocumento3 páginas2 Holter Basado en MicropSaul MendozaAinda não há avaliações
- Microcell CalibrationDocumento10 páginasMicrocell Calibrationprabhu0487Ainda não há avaliações
- Vibration Measurement: Nirjhar DhangDocumento10 páginasVibration Measurement: Nirjhar DhangLuis Carlos EsquivelAinda não há avaliações
- Heartrate MiniprojDocumento4 páginasHeartrate MiniprojAravindanelangovanAinda não há avaliações
- Simple Technique For Root Locus PlottingDocumento9 páginasSimple Technique For Root Locus PlottingHernández VaAinda não há avaliações
- Hewlett Packard Frequency CounterDocumento4 páginasHewlett Packard Frequency CounterkumargpalaniAinda não há avaliações
- Cigre PMU and FACTS PDFDocumento8 páginasCigre PMU and FACTS PDFNando LópezAinda não há avaliações
- Work Permit (Ra Puram) - 28-Nov - 2013Documento1 páginaWork Permit (Ra Puram) - 28-Nov - 2013SasiKumar PetchiappanAinda não há avaliações
- Grade 3 MathsDocumento3 páginasGrade 3 MathsSasiKumar PetchiappanAinda não há avaliações
- Steps For PF Amount Transfer (New) ..............Documento5 páginasSteps For PF Amount Transfer (New) ..............SasiKumar PetchiappanAinda não há avaliações
- User Manual 5 PDFDocumento518 páginasUser Manual 5 PDFSasiKumar PetchiappanAinda não há avaliações
- Slot Information Report - 07!15!2015!19!28-07Documento2 páginasSlot Information Report - 07!15!2015!19!28-07SasiKumar PetchiappanAinda não há avaliações
- Slot Information Report - 07!15!2015!19!28-07Documento2 páginasSlot Information Report - 07!15!2015!19!28-07SasiKumar PetchiappanAinda não há avaliações
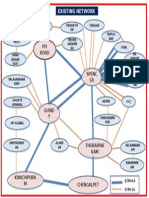
- Existing NetworkDocumento1 páginaExisting NetworkSasiKumar PetchiappanAinda não há avaliações
- SalmanDocumento2 páginasSalmanSasiKumar PetchiappanAinda não há avaliações
- Ieee Electronics 2013 - 2014Documento49 páginasIeee Electronics 2013 - 2014SasiKumar PetchiappanAinda não há avaliações
- Chapter-4: 4.1 Matrix MaterialsDocumento17 páginasChapter-4: 4.1 Matrix MaterialsSasiKumar PetchiappanAinda não há avaliações
- Institution Paper Presentation Contests: S.No Name of The Program Duration of The Program Resource Person(s)Documento34 páginasInstitution Paper Presentation Contests: S.No Name of The Program Duration of The Program Resource Person(s)SasiKumar PetchiappanAinda não há avaliações
- Front Pagels and BonofideDocumento2 páginasFront Pagels and BonofideSasiKumar PetchiappanAinda não há avaliações
- Chapter-5: 5.1 Fabrication Techniques of Composite MaterialsDocumento6 páginasChapter-5: 5.1 Fabrication Techniques of Composite MaterialsSasiKumar PetchiappanAinda não há avaliações
- A R Collage of Engineering and TechnologyDocumento1 páginaA R Collage of Engineering and TechnologySasiKumar PetchiappanAinda não há avaliações
- Content Materials1Documento40 páginasContent Materials1SasiKumar PetchiappanAinda não há avaliações
- Question Bank: Ee 1403 - Design of Electrical ApparatusDocumento11 páginasQuestion Bank: Ee 1403 - Design of Electrical ApparatussuriyasureshAinda não há avaliações
- Theory of Machines12Documento1 páginaTheory of Machines12SasiKumar PetchiappanAinda não há avaliações
- Electrical Based Titles 2009-2010Documento2 páginasElectrical Based Titles 2009-2010Siva SankarAinda não há avaliações
- Quality ConceptDocumento2 páginasQuality ConceptSasiKumar PetchiappanAinda não há avaliações
- Food and OilDocumento11 páginasFood and OilSasiKumar PetchiappanAinda não há avaliações
- 2K Factor PDFDocumento6 páginas2K Factor PDFvmgobinathAinda não há avaliações
- Design Fundamentals, Methods and Material Selection 9Documento1 páginaDesign Fundamentals, Methods and Material Selection 9SasiKumar PetchiappanAinda não há avaliações
- 405 M.E. Computer Science and EngineeringDocumento68 páginas405 M.E. Computer Science and EngineeringThanuambikaAinda não há avaliações
- Write The Procedure To Compile and Install Linux Kernel From SourceDocumento1 páginaWrite The Procedure To Compile and Install Linux Kernel From SourceSasiKumar PetchiappanAinda não há avaliações
- Line Chart 3Documento2 páginasLine Chart 3SasiKumar PetchiappanAinda não há avaliações
- Iat-2 EgDocumento1 páginaIat-2 EgSasiKumar PetchiappanAinda não há avaliações
- Centre For Research Anna University:: Chennai 600025 Enrolment Form/ Registration Renewal FormDocumento1 páginaCentre For Research Anna University:: Chennai 600025 Enrolment Form/ Registration Renewal FormruthshaAinda não há avaliações
- Muhammad NijasDocumento2 páginasMuhammad NijasSasiKumar PetchiappanAinda não há avaliações
- Time Table For EngDocumento1 páginaTime Table For EngSasiKumar PetchiappanAinda não há avaliações
- Rainwater Harvesting Basic ComponentsDocumento3 páginasRainwater Harvesting Basic ComponentsSasiKumar PetchiappanAinda não há avaliações
- Iba America Brochure v3.5.3Documento10 páginasIba America Brochure v3.5.3izraellAinda não há avaliações
- 263Documento14 páginas263Mohan YanamadalaAinda não há avaliações
- INNOWA-WP1-D-UNI-003-01 - D1.1 Benchmark and Market Drivers For An Integrated Intelligent and Lightweight Wagon SolutionDocumento168 páginasINNOWA-WP1-D-UNI-003-01 - D1.1 Benchmark and Market Drivers For An Integrated Intelligent and Lightweight Wagon Solutionashti gosineAinda não há avaliações
- Manual SPM & Ir30Documento95 páginasManual SPM & Ir30Juan José MeroAinda não há avaliações
- ICM Rotec 2019Documento54 páginasICM Rotec 2019Abu Yussif AlaboodiAinda não há avaliações
- Play It Safe.: Know The Moment Your Hose Needs AttentionDocumento6 páginasPlay It Safe.: Know The Moment Your Hose Needs AttentioncuervohijoguachoAinda não há avaliações
- Section 5 Mechatronics SystemDocumento3 páginasSection 5 Mechatronics SystemElectromecanica Leon Electromecanica Leon LeonAinda não há avaliações
- Masaood John Brown - Presentation - v1.1Documento54 páginasMasaood John Brown - Presentation - v1.1Hanif Akbar100% (1)
- VIBGUARD - Compact - Sales Presentation - enDocumento20 páginasVIBGUARD - Compact - Sales Presentation - enSunnyAinda não há avaliações
- Doc3137 2023-08 o - Nesti4 v2.3 User Manual (En)Documento204 páginasDoc3137 2023-08 o - Nesti4 v2.3 User Manual (En)Juliano Fernandes de MoraesAinda não há avaliações
- BakerHughes BN System1 Brochure-071122-WEBDocumento7 páginasBakerHughes BN System1 Brochure-071122-WEBAbbas AlnajjarAinda não há avaliações
- Standar IsoDocumento42 páginasStandar IsoJOMAGUESAinda não há avaliações
- Ieee 323 2003Documento28 páginasIeee 323 2003ingeisaaclg100% (1)
- AviaciónDocumento27 páginasAviaciónRogelio CastroAinda não há avaliações
- How To Measure The Effectiveness of Condition MonitoringDocumento8 páginasHow To Measure The Effectiveness of Condition MonitoringbhaskarAinda não há avaliações
- Machine Vibration Balancing and Condition MonitoringDocumento70 páginasMachine Vibration Balancing and Condition MonitoringcarlosAinda não há avaliações
- SkfreliabilityDocumento40 páginasSkfreliabilityBrown_Bearing_and_Drive_Solutions100% (2)
- Final Year ProjectDocumento76 páginasFinal Year Projectaytenew100% (4)
- S232953 Mark Cruickshank Prac23 ENG432Documento10 páginasS232953 Mark Cruickshank Prac23 ENG432SamMcKinleyAinda não há avaliações
- Bentley Nevada - Case Study No 8Documento12 páginasBentley Nevada - Case Study No 8daniel adamAinda não há avaliações
- Assignment - 1 Applied Dynamics and Machine Condition MonitoringDocumento1 páginaAssignment - 1 Applied Dynamics and Machine Condition MonitoringMohamed IbrahimAinda não há avaliações
- Rockwell Automation Condition Monitoring: Intro To VibrationDocumento12 páginasRockwell Automation Condition Monitoring: Intro To VibrationAnonymous hWRGcOe4XAinda não há avaliações
- Question Bank-Unit 3 SujaiDocumento2 páginasQuestion Bank-Unit 3 Sujaissujai83Ainda não há avaliações
- Pumps, Compressors, Turbines Operation, Maintenance & TroubleshootingDocumento2 páginasPumps, Compressors, Turbines Operation, Maintenance & Troubleshootingm_alodat6144100% (1)
- Toc Mechanical-Shock PDFDocumento6 páginasToc Mechanical-Shock PDFbirserAinda não há avaliações
- Monitoreo de Condiciones CaterpillarDocumento181 páginasMonitoreo de Condiciones CaterpillarMauricio BallonAinda não há avaliações
- Babbitted Bearing Health Assessment PDFDocumento15 páginasBabbitted Bearing Health Assessment PDFdavih007Ainda não há avaliações
- ISO Accredited Training and Certification: VCAT I - Vibration AnalysisDocumento3 páginasISO Accredited Training and Certification: VCAT I - Vibration AnalysisPraveenAinda não há avaliações
- Vibration Analysis TechnologyDocumento3 páginasVibration Analysis TechnologydinhdtAinda não há avaliações
- Normas ICONTEC Disponibles Al 15feb18Documento5 páginasNormas ICONTEC Disponibles Al 15feb18rgrojasgmailcomAinda não há avaliações