Você também pode gostar
- Check List RoscadoraDocumento1 páginaCheck List RoscadoraAngel Huamani60% (5)
- Sistemas de Un Grado de Libertad Con Excitación ArmónicaDocumento25 páginasSistemas de Un Grado de Libertad Con Excitación ArmónicaDaniel González OrtegaAinda não há avaliações
- Ingenieria AutomotrizDocumento15 páginasIngenieria AutomotrizRaul HinojozaAinda não há avaliações
- Pruebas Destructivas de TensionDocumento4 páginasPruebas Destructivas de TensionAndres MongeAinda não há avaliações
- Absorbedores de VibracionDocumento10 páginasAbsorbedores de VibracionJosue SantiagoAinda não há avaliações
- Capitulo 1Documento50 páginasCapitulo 1Yecid MauricioAinda não há avaliações
- Vibraciones AmortiguadasDocumento10 páginasVibraciones AmortiguadasLuis Anaya LopezAinda não há avaliações
- Expo Dinamica VibracionDocumento8 páginasExpo Dinamica VibracionLuis Fernando Jave HerasAinda não há avaliações
- LAB AmortiguadoDocumento2 páginasLAB AmortiguadoEdwin VAinda não há avaliações
- Resonancia en ParaleloDocumento9 páginasResonancia en ParaleloCarlos RamirezAinda não há avaliações
- Aproximacion WKBDocumento5 páginasAproximacion WKBJorge Condori VilcaAinda não há avaliações
- MECÁNICA ESTADÍSTICA 2020 Clase 8 CorregidaDocumento22 páginasMECÁNICA ESTADÍSTICA 2020 Clase 8 CorregidaGonzalo de SouzaAinda não há avaliações
- 3 Principios de EnergiaDocumento38 páginas3 Principios de EnergiaGABRIELA SARAHI LOZANO BENCOMOAinda não há avaliações
- Grados de LibertadDocumento9 páginasGrados de LibertadjhmnaAinda não há avaliações
- Carga ArmónicaDocumento27 páginasCarga ArmónicaDeysi Becerra Alvitres100% (1)
- Apunte Tecnico - Oscilaciones de 1 GDL - ANYWHODocumento44 páginasApunte Tecnico - Oscilaciones de 1 GDL - ANYWHOEdison Segama GuzmánAinda não há avaliações
- Fisica Ejercicios Resueltos Soluciones Movimiento Oscilatorio PDFDocumento14 páginasFisica Ejercicios Resueltos Soluciones Movimiento Oscilatorio PDFlos sabiosAinda não há avaliações
- Fisica Ejercicios Resueltos Soluciones Movimiento OscilatorioDocumento14 páginasFisica Ejercicios Resueltos Soluciones Movimiento OscilatorioLucho Cadavid PatiñoAinda não há avaliações
- Movimiento Armonico Simple (M.A.S.) : Análisis de La Función SenoDocumento11 páginasMovimiento Armonico Simple (M.A.S.) : Análisis de La Función SenoAlan Ramirez RojasAinda não há avaliações
- Motor Monocilindrico EspeDocumento18 páginasMotor Monocilindrico EspeSanty JimenezAinda não há avaliações
- Unidad 3. Vibraciones 2.0Documento34 páginasUnidad 3. Vibraciones 2.0Gerardo HernándezAinda não há avaliações
- Notas MultielectronicosDocumento25 páginasNotas MultielectronicosJoaquin EulerAinda não há avaliações
- Ecuacion de Los Tres MomentosDocumento10 páginasEcuacion de Los Tres MomentosWladimir AvilésAinda não há avaliações
- Practica No 6 Motor MonocilindricoDocumento11 páginasPractica No 6 Motor MonocilindricoJosé RubioAinda não há avaliações
- Sistemas 1 Grado de Libertad Sujetos A Vibracion ForzadaDocumento33 páginasSistemas 1 Grado de Libertad Sujetos A Vibracion ForzadaAndres Ignacio Lopez ValenzuelaAinda não há avaliações
- RozamientoDocumento7 páginasRozamientoYTPipe MineAinda não há avaliações
- Vibraciones Libres - TRABAJO 1Documento7 páginasVibraciones Libres - TRABAJO 1Fernando Vilca CoronadoAinda não há avaliações
- Sistema de Tuberias en Paralelo 12 1Documento42 páginasSistema de Tuberias en Paralelo 12 1maribelAinda não há avaliações
- 0 Ondas Electromagnetiscas PlanasDocumento21 páginas0 Ondas Electromagnetiscas PlanasSantiaguito Sarabia VelásquezAinda não há avaliações
- Guía de Movimiento Armónico SimpleDocumento6 páginasGuía de Movimiento Armónico SimpleCarolay Q. CandiaAinda não há avaliações
- 03 Sistemas de Masa VariableDocumento13 páginas03 Sistemas de Masa VariableLizeth Blanco QAinda não há avaliações
- Ecuacion de Los Tres Momentos PDFDocumento11 páginasEcuacion de Los Tres Momentos PDFRosales Lopez WillmarAinda não há avaliações
- Practica 2.modelado y Simulación de Sistemas DinamicosDocumento11 páginasPractica 2.modelado y Simulación de Sistemas DinamicosGerald Saint Silva Urdaneta100% (1)
- Sistemas de Un Grado de Libertad Sujetos A Vibracion ForzadaDocumento33 páginasSistemas de Un Grado de Libertad Sujetos A Vibracion ForzadaCaro CuadrasAinda não há avaliações
- Microondas ExamenesResueltosDocumento245 páginasMicroondas ExamenesResueltosLuis MigueloAinda não há avaliações
- Distribución CanónicaDocumento14 páginasDistribución CanónicaAlexis QuirozAinda não há avaliações
- Laboratorio 4 FisicaDocumento3 páginasLaboratorio 4 FisicaKaterine Thalia Niño ValderramaAinda não há avaliações
- Masa ResorteDocumento6 páginasMasa ResorteMatías MartínezAinda não há avaliações
- Dinamica Estructural - Capitulo II ResumenDocumento14 páginasDinamica Estructural - Capitulo II ResumenMich SusañaAinda não há avaliações
- Vibración ForzadaDocumento34 páginasVibración ForzadaEsteban Llanos100% (1)
- Forma Generalizada de La Ecuación de Los Tres MomentosDocumento6 páginasForma Generalizada de La Ecuación de Los Tres MomentosThomasAugustoLaraAinda não há avaliações
- Calculo Numerico de Modos y Frecuencias de VibrarDocumento11 páginasCalculo Numerico de Modos y Frecuencias de VibrarLeonardo MaqueraAinda não há avaliações
- Carga ArmónicaDocumento21 páginasCarga ArmónicaDeysi Becerra AlvitresAinda não há avaliações
- Amortiguado Subamortiguado SobreamortiguadoDocumento15 páginasAmortiguado Subamortiguado SobreamortiguadoJorge Ignacio Gonzalez CanoAinda não há avaliações
- Oscilaciones y Ondas MecánicasDocumento20 páginasOscilaciones y Ondas MecánicasKaren M Serrano TAinda não há avaliações
- Divisor de Tension y CorrienteDocumento12 páginasDivisor de Tension y CorrienteEmmer CarvajalAinda não há avaliações
- Consulta Disipador Masa SintonizadaDocumento21 páginasConsulta Disipador Masa SintonizadaByronAinda não há avaliações
- Tarea 1-Teorías de FallaDocumento8 páginasTarea 1-Teorías de FallaJonathan Gadiel Ramirez MartinezAinda não há avaliações
- Experimento de MillikanDocumento5 páginasExperimento de MillikanChristian Mahonry Colorado BulbarelaAinda não há avaliações
- Laboratorio de Vibraciones MecanicasDocumento9 páginasLaboratorio de Vibraciones Mecanicasnikolle12Ainda não há avaliações
- Procedimientos Simplificado Aceleraciones Máximas-Makdisi y SeedDocumento12 páginasProcedimientos Simplificado Aceleraciones Máximas-Makdisi y SeedAnonymous huM1Y0DlLAinda não há avaliações
- Oscilador ArmónicoDocumento11 páginasOscilador ArmónicoAllen LvwAinda não há avaliações
- Dos Grados de LibertadDocumento8 páginasDos Grados de LibertadLuis Miguel VakAinda não há avaliações
- Labo 06Documento6 páginasLabo 06Carolay Q. CandiaAinda não há avaliações
- YoyoDocumento8 páginasYoyoOscar Alfonso Sandoval SaenzAinda não há avaliações
- Trabajo de Sismica AmortiguamientoDocumento3 páginasTrabajo de Sismica AmortiguamientoYonnathan Ramirez OcampoAinda não há avaliações
- Doble CorrelaciónDocumento2 páginasDoble CorrelaciónEliAinda não há avaliações
- WL LubricantesDocumento1 páginaWL LubricantesAngel HuamaniAinda não há avaliações
- 2 PMSDocumento1 página2 PMSAngel HuamaniAinda não há avaliações
- RD6 Data Sheet International Spanish R2 27 17Documento2 páginasRD6 Data Sheet International Spanish R2 27 17Angel HuamaniAinda não há avaliações
- DET. 6 Sección A: L2-X2 - X L2 - X2 - XDocumento1 páginaDET. 6 Sección A: L2-X2 - X L2 - X2 - XAngel HuamaniAinda não há avaliações
- 2 Ficha Tecnica Adhesivo Polyguard 601Documento2 páginas2 Ficha Tecnica Adhesivo Polyguard 601Angel HuamaniAinda não há avaliações
- W PMSDocumento1 páginaW PMSAngel HuamaniAinda não há avaliações
- Pid SoldaduraDocumento1 páginaPid SoldaduraAngel HuamaniAinda não há avaliações
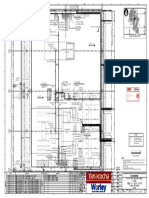
- GF21101058 200 02 PL 118 REV - 0 ModelDocumento1 páginaGF21101058 200 02 PL 118 REV - 0 ModelAngel HuamaniAinda não há avaliações
- Fabricacion de Spools Y Montaje de Tuberia Hdpe: Proyecto Mina Justa - Marcobre Procedimiento Escrito de Trabajo SeguroDocumento1 páginaFabricacion de Spools Y Montaje de Tuberia Hdpe: Proyecto Mina Justa - Marcobre Procedimiento Escrito de Trabajo SeguroAngel HuamaniAinda não há avaliações
- Anexo 04: Registros de Control de Calidad.: Fabricacion de Spools Y Montaje de Tuberia HdpeDocumento1 páginaAnexo 04: Registros de Control de Calidad.: Fabricacion de Spools Y Montaje de Tuberia HdpeAngel HuamaniAinda não há avaliações
- Fabricacion de Spools Y Montaje de Tuberia Hdpe: Proyecto Mina Justa - Marcobre Procedimiento Escrito de Trabajo SeguroDocumento1 páginaFabricacion de Spools Y Montaje de Tuberia Hdpe: Proyecto Mina Justa - Marcobre Procedimiento Escrito de Trabajo SeguroAngel HuamaniAinda não há avaliações
- Anexo 02. Código de Color para Inspecciones Mensuales.: Fabricacion de Spools Y Montaje de Tuberia HdpeDocumento1 páginaAnexo 02. Código de Color para Inspecciones Mensuales.: Fabricacion de Spools Y Montaje de Tuberia HdpeAngel HuamaniAinda não há avaliações
- Fabricacion de Spools Y Montaje de Tuberia Hdpe: Proyecto Mina Justa - Marcobre Procedimiento Escrito de Trabajo SeguroDocumento1 páginaFabricacion de Spools Y Montaje de Tuberia Hdpe: Proyecto Mina Justa - Marcobre Procedimiento Escrito de Trabajo SeguroAngel HuamaniAinda não há avaliações
- Anexos A. B. C. DDocumento1 páginaAnexos A. B. C. DAngel HuamaniAinda não há avaliações
- Estructura PDFDocumento1 páginaEstructura PDFAngel HuamaniAinda não há avaliações
- Fabricacion de Spools Y Montaje de Tuberia Hdpe: Proyecto Mina Justa - Marcobre Procedimiento Escrito de Trabajo SeguroDocumento1 páginaFabricacion de Spools Y Montaje de Tuberia Hdpe: Proyecto Mina Justa - Marcobre Procedimiento Escrito de Trabajo SeguroAngel HuamaniAinda não há avaliações
- Fabricacion de Spools Y Montaje de Tuberia Hdpe: Proyecto Mina Justa - Marcobre Procedimiento Escrito de Trabajo SeguroDocumento1 páginaFabricacion de Spools Y Montaje de Tuberia Hdpe: Proyecto Mina Justa - Marcobre Procedimiento Escrito de Trabajo SeguroAngel HuamaniAinda não há avaliações
- 9.6 Control de Calidad: Fabricacion de Spools Y Montaje de Tuberia HdpeDocumento1 página9.6 Control de Calidad: Fabricacion de Spools Y Montaje de Tuberia HdpeAngel HuamaniAinda não há avaliações
- V 101946 0015a 0200 - 0Documento2 páginasV 101946 0015a 0200 - 0Angel HuamaniAinda não há avaliações
- Fabricacion de Spools Y Montaje de Tuberia Hdpe: Proyecto Mina Justa - Marcobre Procedimiento Escrito de Trabajo SeguroDocumento1 páginaFabricacion de Spools Y Montaje de Tuberia Hdpe: Proyecto Mina Justa - Marcobre Procedimiento Escrito de Trabajo SeguroAngel HuamaniAinda não há avaliações
- Certificado de Homologacion-Gutierrez Gutierrez Jesus HilarionDocumento1 páginaCertificado de Homologacion-Gutierrez Gutierrez Jesus HilarionAngel HuamaniAinda não há avaliações
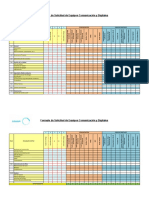
- Formato de Solicitud de Equipos Comunicación y DigitalesDocumento2 páginasFormato de Solicitud de Equipos Comunicación y DigitalesAngel HuamaniAinda não há avaliações
- ProjektingDocumento1 páginaProjektingAngel HuamaniAinda não há avaliações
- 1Documento1 página1Angel HuamaniAinda não há avaliações
- Rp-Viga Carrilera 2Documento1 páginaRp-Viga Carrilera 2Angel HuamaniAinda não há avaliações
- Hs FRM 0006 Petar Excavaciones HLCDocumento1 páginaHs FRM 0006 Petar Excavaciones HLCAngel HuamaniAinda não há avaliações
- Imagenes de PolinesDocumento4 páginasImagenes de PolinesAngel HuamaniAinda não há avaliações
- E Structur ADocumento1 páginaE Structur AAngel HuamaniAinda não há avaliações
- Lista de EquiposDocumento1 páginaLista de EquiposAngel HuamaniAinda não há avaliações
- Topografia IDocumento8 páginasTopografia Iwagner franklinAinda não há avaliações
- Clases de Electromagnetica IIDocumento43 páginasClases de Electromagnetica IIPablo Montes VegaAinda não há avaliações
- Paridad de Una FunciónDocumento9 páginasParidad de Una FunciónCamiloEduardoCardenasCorredorAinda não há avaliações
- Teoria Electromagnetica EjerciciosDocumento46 páginasTeoria Electromagnetica EjerciciosGermanGarciaMontemayorAinda não há avaliações
- Karen PalominoDocumento126 páginasKaren PalominoREYNERIO PAREDES LEYVAAinda não há avaliações
- Ciencias Semana 03Documento19 páginasCiencias Semana 03Jose Requis CastroAinda não há avaliações
- Termo Exposición Informe 1Documento21 páginasTermo Exposición Informe 1Ronald MunozAinda não há avaliações
- Secretaria de Comercio: Norma Oficial MexicanaDocumento7 páginasSecretaria de Comercio: Norma Oficial MexicanaMajo LrAinda não há avaliações
- Compresor de Tornillo AtlascopcoDocumento230 páginasCompresor de Tornillo AtlascopcoAdrian Alonso Bustos Gonzalez100% (4)
- Talller de Numeros Enteros JJGDocumento3 páginasTalller de Numeros Enteros JJGFREDDY MIGUEL VISBAL CANTILLOAinda não há avaliações
- Interconexion Sistemas LinealesDocumento6 páginasInterconexion Sistemas LinealesTecno DeliveryAinda não há avaliações
- Calendario 04-05-2015Documento4 páginasCalendario 04-05-2015obdumarAinda não há avaliações
- Teoria de ModificacionDocumento7 páginasTeoria de ModificacionFercho MariscalAinda não há avaliações
- Ejercicio Aplicacion de Primer OrdenDocumento1 páginaEjercicio Aplicacion de Primer OrdenKehoma DiazAinda não há avaliações
- Actividad 2 Definición de ConceptosDocumento4 páginasActividad 2 Definición de Conceptosharvy100% (2)
- Ejercicios Matlab Cap02 Vectores-2014Documento24 páginasEjercicios Matlab Cap02 Vectores-2014RoyerAngelAinda não há avaliações
- Reporte 4 SolucionesDocumento32 páginasReporte 4 SolucionesHector Arrecis RodasAinda não há avaliações
- Exploración MatemáticaDocumento11 páginasExploración MatemáticaRoger Rondan Cipriano100% (1)
- Capitulo 49Documento9 páginasCapitulo 49Roód'rigo GaliciiaAinda não há avaliações
- Informe Aguas Real 2Documento15 páginasInforme Aguas Real 2katerineAinda não há avaliações
- CRIBASDocumento2 páginasCRIBASalejandroAinda não há avaliações
- El Astrónomo DesilusionadoDocumento4 páginasEl Astrónomo DesilusionadoANGEL3601Ainda não há avaliações
- Comportamiento Estructuras Ante SismosDocumento35 páginasComportamiento Estructuras Ante SismosalejandroAinda não há avaliações
- Venturo GD PDFDocumento83 páginasVenturo GD PDFJhon Bairon GuzmanAinda não há avaliações
- Informe N°6 Laboratorio de Física II UNMSMDocumento18 páginasInforme N°6 Laboratorio de Física II UNMSMFernando SánchezAinda não há avaliações
- Procedimiento Programa de Calibración de Equipos de MediciónDocumento4 páginasProcedimiento Programa de Calibración de Equipos de Mediciónlehoaqp100% (2)
- Tesis DoctoralDocumento209 páginasTesis Doctoraljulian garciaAinda não há avaliações
- Introduccion A Las Pruebas de Vida AceleradaDocumento54 páginasIntroduccion A Las Pruebas de Vida AceleradaViktor GarcíaAinda não há avaliações