Você também pode gostar
- Relatório Tec Lácteos - RequeijãoDocumento12 páginasRelatório Tec Lácteos - RequeijãoAndressa Gonçalves100% (2)
- Apostila Fabiano Coelho Gestao de Custos PDFDocumento115 páginasApostila Fabiano Coelho Gestao de Custos PDFMary Robison AleixoAinda não há avaliações
- Gabarito prova matemática financeira juros simples compostosDocumento2 páginasGabarito prova matemática financeira juros simples compostosMarco Rodrigues100% (2)
- Como Decorar o Quarto Com Pouco DinheiroDocumento13 páginasComo Decorar o Quarto Com Pouco DinheiroJorge EstevesAinda não há avaliações
- Norma Brasileira: Abnt NBR IEC 60079-31Documento18 páginasNorma Brasileira: Abnt NBR IEC 60079-31Caio Cézar100% (1)
- Receita de BrigadeiroDocumento14 páginasReceita de BrigadeiroNayson Morais100% (1)
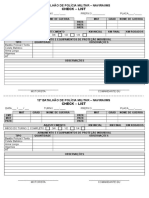
- Check-list de veículo do 12o BPM de NaviraíDocumento2 páginasCheck-list de veículo do 12o BPM de NaviraíkaiqueAinda não há avaliações
- Monografia BaseeeDocumento48 páginasMonografia BaseeejefersonnelAinda não há avaliações
- Curso, Fundamentos Programação Ladder CLPDocumento11 páginasCurso, Fundamentos Programação Ladder CLPHenrique CavallariAinda não há avaliações
- Apostila - Mecanica - Aplicada Curso TécnicoDocumento53 páginasApostila - Mecanica - Aplicada Curso TécnicoIgor GabrielAinda não há avaliações
- RenDocumento24 páginasRenDouglas Ricardo de OliveiraAinda não há avaliações
- Reflexão Cultura Comunicação e MédiaDocumento1 páginaReflexão Cultura Comunicação e MédiaMélita MeloAinda não há avaliações
- Lâmina - VLT® Micro Drive FC 51 - PTDocumento2 páginasLâmina - VLT® Micro Drive FC 51 - PTMarkyn FerreiraAinda não há avaliações
- 01 - Lista de Comunicações ÓpticasDocumento7 páginas01 - Lista de Comunicações ÓpticasGabriel MachadoAinda não há avaliações
- Licenciamento ambiental de portosDocumento32 páginasLicenciamento ambiental de portosRoger landinAinda não há avaliações
- Matriz Técnica ABAPDocumento169 páginasMatriz Técnica ABAPnaotosx100% (1)
- Capitulo 06 - HeapsortDocumento92 páginasCapitulo 06 - Heapsortasdadsda4434343Ainda não há avaliações
- Portaria - 936 2011 - MJ Credenciamento Pag2Documento1 páginaPortaria - 936 2011 - MJ Credenciamento Pag2Icrad OironetAinda não há avaliações
- Inovação - Como Aplicar Design Thinking Na Administração Pública - PDFDocumento5 páginasInovação - Como Aplicar Design Thinking Na Administração Pública - PDFAlberto BrandãoAinda não há avaliações
- Respostas SIMULADODocumento61 páginasRespostas SIMULADOVictor Hugo Soares Lima33% (3)
- Livro Sucesso+no+Leite PDFDocumento99 páginasLivro Sucesso+no+Leite PDFAndressa NunesAinda não há avaliações
- Ficha 7 - Integracao Vertical PDFDocumento7 páginasFicha 7 - Integracao Vertical PDFJoseph SmithAinda não há avaliações
- Sistema de Patch Balun modular para CFTV analógico e HDDocumento4 páginasSistema de Patch Balun modular para CFTV analógico e HDSergio GuimarãesAinda não há avaliações
- Nota de Serviço Marilan 197Documento1 páginaNota de Serviço Marilan 197WebSAT SoluçõesAinda não há avaliações
- Inovação em óculos de segurança digitaisDocumento8 páginasInovação em óculos de segurança digitaisdesetekAinda não há avaliações
- Justificativa Edital 5 - Ronda EscolarDocumento7 páginasJustificativa Edital 5 - Ronda EscolarMarcos Daniel Schmidt GarofaloAinda não há avaliações
- Diário Da Justiça Eletrônico - Data Da Veiculação - 23 - 08 - 2023Documento240 páginasDiário Da Justiça Eletrônico - Data Da Veiculação - 23 - 08 - 2023desapegolivrosAinda não há avaliações
- Simulado Pne 01Documento4 páginasSimulado Pne 01Helio Dos Santos CorreiaAinda não há avaliações
- ENG.-ELÉTRICA UninorteDocumento4 páginasENG.-ELÉTRICA UninorteJean Martins FrancoAinda não há avaliações
- Relatório de Máquinas ElétricasDocumento30 páginasRelatório de Máquinas ElétricasEder NelsonAinda não há avaliações
- Caminhos para reduzir a burocracia dos pequenos negóciosDocumento45 páginasCaminhos para reduzir a burocracia dos pequenos negóciosucon 2209Ainda não há avaliações
- Apostila de Auditoria para ConcursosDocumento16 páginasApostila de Auditoria para ConcursosAchei Concursos0% (1)
- Porcentagem Matemática para IniciantesDocumento13 páginasPorcentagem Matemática para IniciantesAdamSoaresAinda não há avaliações
- Nota Informativa Licencas Sem Vencimento Licencas Sem RemuneracaoDocumento7 páginasNota Informativa Licencas Sem Vencimento Licencas Sem RemuneracaocdanielsampaiocAinda não há avaliações