Você também pode gostar
- Prevention of Actuator Emissions in the Oil and Gas IndustryNo EverandPrevention of Actuator Emissions in the Oil and Gas IndustryAinda não há avaliações
- Spring Loaded Safety ValvesDocumento16 páginasSpring Loaded Safety ValvesUdit Kumar Sarkar0% (1)
- PSV Data BookDocumento16 páginasPSV Data Bookkenoly123Ainda não há avaliações
- ES - SVVent User ManualDocumento12 páginasES - SVVent User ManualBabyface888Ainda não há avaliações
- Prevention of Valve Fugitive Emissions in the Oil and Gas IndustryNo EverandPrevention of Valve Fugitive Emissions in the Oil and Gas IndustryAinda não há avaliações
- Guidelines On The Maintenance of Pressure Relief Valves On Board Gas CarriersDocumento17 páginasGuidelines On The Maintenance of Pressure Relief Valves On Board Gas Carriers123habib123fikriAinda não há avaliações
- Introduction PSVDocumento11 páginasIntroduction PSVNguyen Anh TungAinda não há avaliações
- Ijet V2i2p15Documento4 páginasIjet V2i2p15International Journal of Engineering and TechniquesAinda não há avaliações
- Control Valves in Process PlantDocumento8 páginasControl Valves in Process Plantmukramah.yusufAinda não há avaliações
- Microsoft Word - SVDocumento62 páginasMicrosoft Word - SVaftabulalamAinda não há avaliações
- Block 9 Safety ValvesDocumento85 páginasBlock 9 Safety ValvesBabu AravindAinda não há avaliações
- Microsoft Word - SV - Part1Documento6 páginasMicrosoft Word - SV - Part1aftabulalamAinda não há avaliações
- Safety Valve IntroductionDocumento88 páginasSafety Valve Introductionbhuvi_patu12100% (3)
- PRD Design FundamentalsDocumento6 páginasPRD Design Fundamentalsnarayanan_anoobAinda não há avaliações
- 5 Pressure Relief ValvesDocumento11 páginas5 Pressure Relief ValvesNyoman RakaAinda não há avaliações
- Pressure Safety Relief Valves Pressure Safety Relief Valves: Technical Bulletin 3 Technical Bulletin 3-IDocumento16 páginasPressure Safety Relief Valves Pressure Safety Relief Valves: Technical Bulletin 3 Technical Bulletin 3-Isabi_shiAinda não há avaliações
- Capacity Control of Reciprocating Compressors Used in Refrigerati PDFDocumento9 páginasCapacity Control of Reciprocating Compressors Used in Refrigerati PDFRapee PuaksungnoenAinda não há avaliações
- Safety Valve SelectionDocumento56 páginasSafety Valve Selectionganesh82Ainda não há avaliações
- Pressure Safety Design Practices For Refinery and Chemical Operations 831Documento32 páginasPressure Safety Design Practices For Refinery and Chemical Operations 831JO100% (1)
- Purdue UniversityDocumento11 páginasPurdue UniversitymechengAinda não há avaliações
- Surface Control of Injected GasDocumento3 páginasSurface Control of Injected GasDeny Fatryanto EkoAinda não há avaliações
- MIT-EL-80-017-09574615 Steam Bubble Collapse Water Hammer and Piping Network Response Volume 1 PDFDocumento51 páginasMIT-EL-80-017-09574615 Steam Bubble Collapse Water Hammer and Piping Network Response Volume 1 PDFhamadaniAinda não há avaliações
- TRG Control ValveDocumento13 páginasTRG Control Valvemilton1987Ainda não há avaliações
- Specifying Surge Relief Valves in Liquid PipelinesDocumento6 páginasSpecifying Surge Relief Valves in Liquid Pipelinesmatteo2009Ainda não há avaliações
- Vent Manifold Flare Manifold DesignDocumento10 páginasVent Manifold Flare Manifold Designahsan888Ainda não há avaliações
- Design and Calculation of The Pressure Relief Valves and Rupture Disks SystemDocumento54 páginasDesign and Calculation of The Pressure Relief Valves and Rupture Disks Systemghada gattouchAinda não há avaliações
- Pressure Safety Valve FundamentalsDocumento21 páginasPressure Safety Valve Fundamentalsaop10468100% (2)
- Computational Fluid Dynamic Analysis of Flow Coefficient For Pan Check ValveDocumento4 páginasComputational Fluid Dynamic Analysis of Flow Coefficient For Pan Check ValveMax KocourAinda não há avaliações
- Characteristics of Control ValveDocumento9 páginasCharacteristics of Control ValvecomodusAinda não há avaliações
- Designand Calculationofthe Pressure Relief Valvesand Rupture Disks SystemDocumento54 páginasDesignand Calculationofthe Pressure Relief Valvesand Rupture Disks SystemULAGANATHAN M100% (1)
- Control Valve - Surge Relief Valve Selection GuideDocumento20 páginasControl Valve - Surge Relief Valve Selection GuideSriya PetikiriarachchigeAinda não há avaliações
- AKTUATORDocumento59 páginasAKTUATORAbd QoyyumAinda não há avaliações
- Types of Pressure Relief ValvesDocumento22 páginasTypes of Pressure Relief ValvesFaraz MichAinda não há avaliações
- Designand Calculationofthe Pressure Relief Valvesand Rupture Disks SystemDocumento54 páginasDesignand Calculationofthe Pressure Relief Valvesand Rupture Disks SystemKaiwlya BhoyarAinda não há avaliações
- Microsoft Word - SV - Part10Documento6 páginasMicrosoft Word - SV - Part10aftabulalamAinda não há avaliações
- AgriDocumento22 páginasAgripuneet bhatiaAinda não há avaliações
- Drill Stem Testing, DSTDocumento3 páginasDrill Stem Testing, DSTUthman MohammedAinda não há avaliações
- Safety ValvesDocumento65 páginasSafety Valvesserturkbudak_3448365Ainda não há avaliações
- Pressure Safety ValvesDocumento15 páginasPressure Safety Valvesh_abdullah100% (2)
- Pressure Safety ValveDocumento11 páginasPressure Safety ValveamitpallathAinda não há avaliações
- Safety ValveDocumento10 páginasSafety ValveVignesh WarAinda não há avaliações
- Plant Safety and Pressure Relieving OperationsDocumento104 páginasPlant Safety and Pressure Relieving OperationskglorstadAinda não há avaliações
- t000005801 PDFDocumento7 páginast000005801 PDFMohammed Hassan B KorainaAinda não há avaliações
- Surge Pressure Formula PDFDocumento3 páginasSurge Pressure Formula PDFnirmal_subudhiAinda não há avaliações
- REPORTpp 1Documento16 páginasREPORTpp 1gajulavamshikrishna02Ainda não há avaliações
- Design Fundamentals: Materials of ConstructionDocumento2 páginasDesign Fundamentals: Materials of ConstructionSusheel WankhedeAinda não há avaliações
- Design and Calculation of The Pressure Relief ValvesDocumento53 páginasDesign and Calculation of The Pressure Relief Valvesghassan hamadAinda não há avaliações
- Stormchokes OverviewDocumento6 páginasStormchokes OverviewJumi mikol100% (2)
- Control Valves Interview QuestionsDocumento7 páginasControl Valves Interview QuestionsDerbel WalidAinda não há avaliações
- 7 - Control Valve CharacteristicsDocumento11 páginas7 - Control Valve CharacteristicsAhmed ShahabiAinda não há avaliações
- Relief Valves and Relief SystemsDocumento10 páginasRelief Valves and Relief Systemsmatteo2009Ainda não há avaliações
- AKTUATORDocumento59 páginasAKTUATORBudi HandokoAinda não há avaliações
- Pulse Valves For Dust Collector SystemsDocumento4 páginasPulse Valves For Dust Collector SystemsUrip S. SetyadjiAinda não há avaliações
- HighBeam Research Article APR 13 2016Documento14 páginasHighBeam Research Article APR 13 2016Sílvio MonteiroAinda não há avaliações
- Henderson Afmc 16 07Documento7 páginasHenderson Afmc 16 07Devendra BangarAinda não há avaliações
- The Function of Control Valve Actuators & PositionersDocumento25 páginasThe Function of Control Valve Actuators & PositionersFlowealthAinda não há avaliações
- Control Valve Actuators and PositionersDocumento13 páginasControl Valve Actuators and PositionersRahul LavandAinda não há avaliações
- JCARME v1n1p17Documento12 páginasJCARME v1n1p17Sharat ChandraAinda não há avaliações
- Checklist WeldingDocumento5 páginasChecklist WeldingMarko RisticAinda não há avaliações
- Risk Management FrameworkDocumento18 páginasRisk Management FrameworkMarko RisticAinda não há avaliações
- International Journal of Fatigue: K.K. Shi, L.X. Cai, L. Chen, S.C. Wu, C. BaoDocumento6 páginasInternational Journal of Fatigue: K.K. Shi, L.X. Cai, L. Chen, S.C. Wu, C. BaoMarko RisticAinda não há avaliações
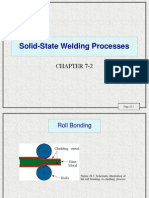
- Solid-State Welding Processes: Chapter 7-2Documento18 páginasSolid-State Welding Processes: Chapter 7-2Marko RisticAinda não há avaliações
- Hardox 450Documento3 páginasHardox 450Marko RisticAinda não há avaliações
- U Pravom Testu Nema Ponudjenih Reci (BEEN, YOU ) Vec Mozete Upotrebiti Bilo Koje, Ali Recenica Treba Da Ima Smisla I Da Ne Promeni ZnacenjeDocumento3 páginasU Pravom Testu Nema Ponudjenih Reci (BEEN, YOU ) Vec Mozete Upotrebiti Bilo Koje, Ali Recenica Treba Da Ima Smisla I Da Ne Promeni ZnacenjeMarko RisticAinda não há avaliações
- M.tech Sem-2 DYN Tutorial-1Documento2 páginasM.tech Sem-2 DYN Tutorial-1Rutvik ShethAinda não há avaliações
- SolutionChap32 PDFDocumento25 páginasSolutionChap32 PDFChai Usajai Usajai100% (1)
- Question Bank MV 2023 Unit IDocumento6 páginasQuestion Bank MV 2023 Unit IDurgesh KhannaAinda não há avaliações
- AME341b 2010 Lecture& Lab Notes JerryDocumento114 páginasAME341b 2010 Lecture& Lab Notes JerrydalernhardtjrAinda não há avaliações
- Damping Resistor PDFDocumento3 páginasDamping Resistor PDFFarhan ShahAinda não há avaliações
- American Mathematical Monthly - 1999 - 01-JanuaryDocumento100 páginasAmerican Mathematical Monthly - 1999 - 01-JanuaryscionaAinda não há avaliações
- Physics Ebook - Class 11 - Part 2Documento209 páginasPhysics Ebook - Class 11 - Part 2Haltz t00nAinda não há avaliações
- Intro Physics 1Documento536 páginasIntro Physics 1shocherAinda não há avaliações
- Hemispherical Resonator Gyro Technology. Problems and Possible Ways of Their SolutionsDocumento10 páginasHemispherical Resonator Gyro Technology. Problems and Possible Ways of Their SolutionskirancallsAinda não há avaliações
- Theory of Vibration Learn EngineeringDocumento4 páginasTheory of Vibration Learn EngineeringWahid HusainAinda não há avaliações
- Airpax Step Motor 12 VOLTSDocumento44 páginasAirpax Step Motor 12 VOLTSlucian lunaAinda não há avaliações
- Ovchinkin Problems in PhysicsDocumento16 páginasOvchinkin Problems in PhysicsDeekshaAinda não há avaliações
- 10 Greens FunctionDocumento8 páginas10 Greens FunctionDiego SilvaAinda não há avaliações
- Damping FantasticDocumento20 páginasDamping FantastickapolaAinda não há avaliações
- Design of Structures and Foundations For Vibrating Machines, Arya-Oneill-PincusDocumento210 páginasDesign of Structures and Foundations For Vibrating Machines, Arya-Oneill-PincusBar Avait100% (1)
- Jacket Launching AnalysisDocumento7 páginasJacket Launching Analysisiw2fualAinda não há avaliações
- Tempo GolfDocumento16 páginasTempo Golfmaple0syrupAinda não há avaliações
- (French) Contribution To The Analysis and Prevention of Blackouts in Power GridsDocumento226 páginas(French) Contribution To The Analysis and Prevention of Blackouts in Power Gridsgreenblue02Ainda não há avaliações
- Experiment N7 Damped Oscillation - Bar Oscillation: ObjectiveDocumento3 páginasExperiment N7 Damped Oscillation - Bar Oscillation: ObjectiveMohanadAlrofuAinda não há avaliações
- Simple Harmonic MotionDocumento8 páginasSimple Harmonic MotionPratul NijhawanAinda não há avaliações
- Dynamic Analysis of Pile FoundationsDocumento9 páginasDynamic Analysis of Pile FoundationsasgharAinda não há avaliações
- Simple Harmonic Motion Spring-Mass SystemDocumento5 páginasSimple Harmonic Motion Spring-Mass SystemJanisa SacariaAinda não há avaliações
- 1Documento9 páginas1Rega SaputraAinda não há avaliações
- Rotational EquilibriumDocumento42 páginasRotational EquilibriumSpace Monkey100% (1)
- MST 2Documento4 páginasMST 2Neha Prashant VermaAinda não há avaliações
- Forced Oscillation and Resonance: PreviewDocumento17 páginasForced Oscillation and Resonance: PreviewhimanshuAinda não há avaliações
- Offshore HydrodynamicsDocumento44 páginasOffshore HydrodynamicsKtk ZadAinda não há avaliações
- Dynamic Absorber DesignDocumento14 páginasDynamic Absorber DesignLarry Deem0% (1)
- Analysis of Experimental Dynamic Soil-Pile Interaction by Approximate Numerical SolutionsDocumento10 páginasAnalysis of Experimental Dynamic Soil-Pile Interaction by Approximate Numerical SolutionsMohamed MamdohAinda não há avaliações
- Algorithms to Live By: The Computer Science of Human DecisionsNo EverandAlgorithms to Live By: The Computer Science of Human DecisionsNota: 4.5 de 5 estrelas4.5/5 (722)
- Generative AI: The Insights You Need from Harvard Business ReviewNo EverandGenerative AI: The Insights You Need from Harvard Business ReviewNota: 4.5 de 5 estrelas4.5/5 (2)
- Cyber War: The Next Threat to National Security and What to Do About ItNo EverandCyber War: The Next Threat to National Security and What to Do About ItNota: 3.5 de 5 estrelas3.5/5 (66)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyNo EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyNota: 3.5 de 5 estrelas3.5/5 (111)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNo EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceAinda não há avaliações
- Binary Option Trading: Introduction to Binary Option TradingNo EverandBinary Option Trading: Introduction to Binary Option TradingAinda não há avaliações
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldNo EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldNota: 4.5 de 5 estrelas4.5/5 (55)
- Learn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.No EverandLearn Python Programming for Beginners: Best Step-by-Step Guide for Coding with Python, Great for Kids and Adults. Includes Practical Exercises on Data Analysis, Machine Learning and More.Nota: 5 de 5 estrelas5/5 (34)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceNo EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceNota: 5 de 5 estrelas5/5 (5)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveAinda não há avaliações
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeNo EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeNota: 4.5 de 5 estrelas4.5/5 (69)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNo Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziAinda não há avaliações
- Chip War: The Quest to Dominate the World's Most Critical TechnologyNo EverandChip War: The Quest to Dominate the World's Most Critical TechnologyNota: 4.5 de 5 estrelas4.5/5 (229)
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideNo EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideNota: 5 de 5 estrelas5/5 (2)
- Understanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerNo EverandUnderstanding Software: Max Kanat-Alexander on simplicity, coding, and how to suck less as a programmerNota: 4.5 de 5 estrelas4.5/5 (44)
- CISM Certified Information Security Manager Study GuideNo EverandCISM Certified Information Security Manager Study GuideAinda não há avaliações
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindAinda não há avaliações
- The Staff Engineer's Path: A Guide for Individual Contributors Navigating Growth and ChangeNo EverandThe Staff Engineer's Path: A Guide for Individual Contributors Navigating Growth and ChangeNota: 4.5 de 5 estrelas4.5/5 (6)
- AP Computer Science A Premium, 2024: 6 Practice Tests + Comprehensive Review + Online PracticeNo EverandAP Computer Science A Premium, 2024: 6 Practice Tests + Comprehensive Review + Online PracticeAinda não há avaliações
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldNo EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldNota: 4.5 de 5 estrelas4.5/5 (107)
- Working with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)No EverandWorking with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Nota: 5 de 5 estrelas5/5 (5)
- Sweet Spot UX: Communicating User Experience to Stakeholders, Decision Makers and Other HumansNo EverandSweet Spot UX: Communicating User Experience to Stakeholders, Decision Makers and Other HumansNota: 4.5 de 5 estrelas4.5/5 (5)
- Evaluation of Some SMS Verification Services and Virtual Credit Cards Services for Online Accounts VerificationsNo EverandEvaluation of Some SMS Verification Services and Virtual Credit Cards Services for Online Accounts VerificationsNota: 5 de 5 estrelas5/5 (2)