Você também pode gostar
- Pronombres PersonalesDocumento23 páginasPronombres PersonalesAndres SolanoAinda não há avaliações
- Problemas Semiconductores Conmutacion PDFDocumento36 páginasProblemas Semiconductores Conmutacion PDFyellow_GuardAinda não há avaliações
- Ingeniería UC: Universidad de Carabobo ISSN (Versión Impresa) : 1316-6832 VenezuelaDocumento0 páginaIngeniería UC: Universidad de Carabobo ISSN (Versión Impresa) : 1316-6832 VenezuelaAndres SolanoAinda não há avaliações
- Robotica Int Manuf PDFDocumento33 páginasRobotica Int Manuf PDFAndres SolanoAinda não há avaliações
- L1 Introducción Al Matlab y SimulinkDocumento16 páginasL1 Introducción Al Matlab y SimulinkDiego_Andres_S_7669Ainda não há avaliações
- ANTEPROYECTODocumento9 páginasANTEPROYECTOAndres SolanoAinda não há avaliações
- Rectificador Monofásico PWM: Diseño e ImplementaciónDocumento7 páginasRectificador Monofásico PWM: Diseño e ImplementaciónJosue MatuAinda não há avaliações
- Simulador de Convertidores DC-DCDocumento182 páginasSimulador de Convertidores DC-DCAgustin Ramirez JimenezAinda não há avaliações
- V 10 N 1 A 6Documento12 páginasV 10 N 1 A 6Andres SolanoAinda não há avaliações
- Robotica Int Manuf PDFDocumento33 páginasRobotica Int Manuf PDFAndres SolanoAinda não há avaliações
- Bmfcig 643 A LABVIEWDocumento138 páginasBmfcig 643 A LABVIEWarmal1210100% (1)
- Rectificador Monofásico PWM: Diseño e ImplementaciónDocumento7 páginasRectificador Monofásico PWM: Diseño e ImplementaciónJosue MatuAinda não há avaliações
- Com SerieDocumento22 páginasCom SerieFrancisco SachicaAinda não há avaliações
- Modelo OsiDocumento11 páginasModelo OsiAndres SolanoAinda não há avaliações
- Narrativa ProcesoDocumento11 páginasNarrativa ProcesoCompu VoipAinda não há avaliações
- Com SerieDocumento22 páginasCom SerieFrancisco SachicaAinda não há avaliações
- Presentacionfinal 110703235428 Phpapp01Documento15 páginasPresentacionfinal 110703235428 Phpapp01Andres SolanoAinda não há avaliações
- 02-Sist Telecomunicaciones III - Parcial FinalDocumento8 páginas02-Sist Telecomunicaciones III - Parcial FinalAndres SolanoAinda não há avaliações
- 3 1tiristoresDocumento28 páginas3 1tiristoresluao123Ainda não há avaliações
- Manual de Practicas de Control Avanzado VERSION EstDocumento112 páginasManual de Practicas de Control Avanzado VERSION EstVictor Daniel Medina Flores100% (2)
- Paper de InstrumentacionDocumento5 páginasPaper de InstrumentacionAndres SolanoAinda não há avaliações
- Confirmation Ticket Bogota 2013Documento1 páginaConfirmation Ticket Bogota 2013Andres SolanoAinda não há avaliações
- Amando A Pablo, Odiando A EscobarDocumento7 páginasAmando A Pablo, Odiando A EscobarAndres Solano0% (1)
- TrifasicoDocumento13 páginasTrifasicoConti ContiAinda não há avaliações
- Capacitores TeoriaDocumento12 páginasCapacitores TeoriaDaniel Garcia PinosAinda não há avaliações
- Materias de Ing ElectromecanicaDocumento1 páginaMaterias de Ing ElectromecanicaAndres SolanoAinda não há avaliações
- Transistores de PotenciaDocumento11 páginasTransistores de PotenciadannyjaviersAinda não há avaliações
- Primer Momento C H M de 4Documento3 páginasPrimer Momento C H M de 4Ayelen MarquezAinda não há avaliações
- Control (Diagrama)Documento1 páginaControl (Diagrama)Kënïä De ÄrgëlAinda não há avaliações
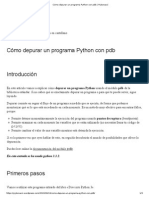
- Cómo Depurar Un Programa Python Con PDB - PybonacciDocumento9 páginasCómo Depurar Un Programa Python Con PDB - PybonacciAndrea VNAinda não há avaliações
- Ventajas y desventajas de procesos plásticosDocumento3 páginasVentajas y desventajas de procesos plásticosBrayanCorderoAinda não há avaliações
- Tarea 3 ADocumento5 páginasTarea 3 AMk LucyAinda não há avaliações
- Compressors STC Portfolio Esp (Exposicion 3)Documento8 páginasCompressors STC Portfolio Esp (Exposicion 3)Luis Francisco Palma ZentAinda não há avaliações
- Modelos de Correlación Entre El PDC y El CBR Inalterado PaDocumento23 páginasModelos de Correlación Entre El PDC y El CBR Inalterado PaSara Ramirez Valencia100% (2)
- Contrato de servicio de verificación vehicular federalDocumento11 páginasContrato de servicio de verificación vehicular federalRuben93030823Ainda não há avaliações
- 4 JunioDocumento21 páginas4 JunioAna Jacqueline Rodriguez MartinezAinda não há avaliações
- 01.07.11 Pa - 03Documento1 página01.07.11 Pa - 03andy esteban sarmientoAinda não há avaliações
- 1° CienciasDocumento3 páginas1° CienciasCristian Flores BustamanteAinda não há avaliações
- gr08 Ej4 v1Documento5 páginasgr08 Ej4 v1H André Acosta0% (1)
- El Transhumanismo y Su Representacion en FrankensteinDocumento4 páginasEl Transhumanismo y Su Representacion en FrankensteinsebastianAinda não há avaliações
- Instalaciones ElectricasDocumento25 páginasInstalaciones ElectricasJuan Edson Ramos GanozaAinda não há avaliações
- Plan Estrategico de La Optica MaxivisionDocumento27 páginasPlan Estrategico de La Optica MaxivisionJiménez Chávez JaimeAinda não há avaliações
- TDR Apuntalamiento GlorietaDocumento4 páginasTDR Apuntalamiento GlorietaLeandro Valdivieso AntonAinda não há avaliações
- Sofia Vega SP IDocumento29 páginasSofia Vega SP ISofia Isabel Vega GonzalezAinda não há avaliações
- Doctrina de Las Comunicaciones NavalesDocumento52 páginasDoctrina de Las Comunicaciones Navalescarlos zapataAinda não há avaliações
- Carta PsicrometricaDocumento29 páginasCarta PsicrometricaJessy MarínAinda não há avaliações
- Glosario Teoría Del Derecho PDFDocumento8 páginasGlosario Teoría Del Derecho PDFLuis Mariano Betrian Aldea100% (1)
- Manual de Creación Usuario SAP y Solicitudes de Pedido (SOLPED)Documento14 páginasManual de Creación Usuario SAP y Solicitudes de Pedido (SOLPED)Vanina DemiAinda não há avaliações
- A la deriva de Quiroga y el poder de la naturalezaDocumento7 páginasA la deriva de Quiroga y el poder de la naturalezaRamiro Ibañez LaraAinda não há avaliações
- Guía para La Identificación y Valoración de Riesgos - Nueva NIA 315Documento43 páginasGuía para La Identificación y Valoración de Riesgos - Nueva NIA 315LUISA FERNANDA CALLEJAS ORREGOAinda não há avaliações
- Reglamento Interno de La Procuraduría Estatal de Protección Al AmbienteDocumento16 páginasReglamento Interno de La Procuraduría Estatal de Protección Al AmbienteAlejandro SanchezAinda não há avaliações
- 10 - Ejecución de Subreparto Plan (D)Documento21 páginas10 - Ejecución de Subreparto Plan (D)ainara1986Ainda não há avaliações
- Análisis flexibilidad bombas unidades Orthoflow HCM UOPDocumento3 páginasAnálisis flexibilidad bombas unidades Orthoflow HCM UOPcarlos rueda100% (1)
- Ampliacion de PlazoDocumento12 páginasAmpliacion de PlazoDiegoHieloAinda não há avaliações
- Memorial de Agravios, el documento que defendió los derechos de los criollosDocumento2 páginasMemorial de Agravios, el documento que defendió los derechos de los criollospigmalion2622% (9)
- El Efecto SeñueloDocumento5 páginasEl Efecto SeñueloLuis Alfredo ValentinoAinda não há avaliações
- Instrumentos viento maderaDocumento4 páginasInstrumentos viento maderaAnder JalalAinda não há avaliações