Escolar Documentos
Profissional Documentos
Cultura Documentos
Mono Graf I A Anderson Bre MM
Enviado por
cayo16Título original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Mono Graf I A Anderson Bre MM
Enviado por
cayo16Direitos autorais:
Formatos disponíveis
CENTRO UNIVERSITRIO FEEVALE
ANDERSON BREMM
SISTEMA DE MONITORAMENTO DE PRESSO DE PNEUS - TPMS
Novo Hamburgo, dezembro de 2007.
ANDERSON BREMM
SISTEMA DE MONITORAMENTO DE PRESSO DE PNEUS - TPMS
Centro universitrio FEEVALE
Instituto de Cincias Exatas e Tecnolgicas
Engenharia Eletrnica
Trabalho de Concluso de Curso
Professor Orientador: Prof. Ms. Csar David Paredes Crovato
Novo Hamburgo, dezembro de 2007.
Quando nada parece ajudar, eu penso em um cortador de pedras
martelando uma rocha talvez cem vezes sem que nem uma s
rachadura aparea. No entanto, na centsima primeira martelada, a
pedra se abre em duas e eu sei que no foi aquela a que conseguiu,
mas todas as que vieram antes.
{J acob Riis}
Dedico este trabalho a todos que me apoiaram, em especial
meus familiares, que acreditando em meu futuro incentivaram e
proporcionaram a concluso deste curso.
AGRADECIMENTO
Depois de tamanha dedicao, incontveis noites em claro, concluir este trabalho um
motivo de muita alegria. Devo agradecimentos s pessoas que me ajudaram e me
incentivaram nos momentos mais difceis.
Aos meus pais, pela pacincia.
Ao Csar Crovato, pela excelente orientao e por acreditar no meu potencial.
Ao Ewerton Artur Cappelatti, pela ateno que teve por mim em todos os momentos.
Ao Paulo Piber pela compreenso das dificuldades e auxlio nos momentos difceis.
Ao Delfim Torok pela motivao e o apoio neste perodo.
Aos colegas da Feevale, pela camaradagem e por estarmos no mesmo barco.
A todos os professores, pela motivao e pela amizade.
RESUMO
O Trabalho de Concluso de Curso descrito neste relatrio refere-se ao projeto de um
Sistema de Monitoramento de Presso de Pneus (TPMS), onde aplicado um conjunto de
tcnicas de eletrnica em conjunto com mecnica, visando otimizao dos recursos,
resultando em mais um item de conforto e segurana para condutores de veculos
automotores.
O projeto consiste em um sistema capaz de informar a presso de um pneu atravs da
aquisio da varivel por meio de um sensor de presso tipo Ponte de Wheatstone, este sensor
fornece um valor de tenso na faixa de milivolts, proporcional presso absoluta, portanto
necessita de amplificao para ser interpretado pelo microcontrolador. A alimentao do
circuito de medio feita contando com o princpio de induo de energia. Foi utilizado o
microcontrolador MSP430 da empresa Texas Instruments, programado em linguagem C,
depurado e gravado no circuito atravs do compilador IAR Embedded Workbench kickstart
Free, da empresa IAR. O microcontrolador efetua a transmisso da informao de presso
repetidamente em intervalos de aproximadamente dois segundos, atravs do mdulo de
transmisso sem fio Wenshing TRW-24G, composto essencialmente por um circuito
integrado nRF4201, fabricado pela empresa Nordic, que opera na faixa de freqncia de
2,4GHz e uma antena para recepo ou transmisso dos sinais
Para validao do projeto foi elaborado um software em Visual Basic Dot Net
(vb.Net) para Windows XP
. Este software, capaz de receber, processar e informar na tela de
um computador pessoal a varivel da presso recebida atravs de comunicao serial RS-232
do kit de aprendizagem nRF2401 EVBOARD, desenvolvido pela Nordic. Como o sensor
fornece um valor de tenso que foi amplificado, o sinal da sada do amplificador foi
verificado a fim de permitir um erro de 0,5%
FE
. O erro do medidor de presso foi inferior a
0,25PSIg quando submetido a uma presso gerada a partir do instrumento utilizado como
fonte padro, o Mityvacc MV6255. As medies feitas em movimento forneceram valores
ligeiramente diferentes devido necessidade de otimizao da placa de circuito impresso. O
resultado geral obtido neste projeto satisfatrio apontando apenas melhorias mecnicas, por
exemplo, refinamento nos clculos da bobinas de induo, miniaturizao do circuito e
encapsular ou resinar o circuito disposto no interior do pneu a fim de evitar danos devido a
vibraes.
ABSTRACT
This work of completion of the course refers to the project of a Tires Pressure
Monitoring System (TPMS), where a set of electronic techniques are applied in addition to
mechanical techniques to optimize resources, resulting on more comfort and safety items for
vehicles.
The project is based on a system that's able to inform the tire pressure through a
variable acquisition using a pressure sensor type Wheatstone bridge. This sensor gives a
voltage value in milivolts range, that's proportional to the absolute pressure which must be
amplified to be interpreted by the microcontroller. The power source of the circuit is done
using the energy induction principle. A Texas Instruments MSP430 microcontroller was used,
programmed in C, debugged and recorded in a circuit using an
IAR Embedded Workbench kickstart Free compiler. The microcontroller sends the pressure
data repeatedly in approximately two seconds intervals through the Wenshing TRW-24G
wireless module, composed of a Nordic nRF4201 integrated circuit which operates in the
range of 2,4GHz frequency and a reception and transmition antenna for the signals.
A software, for Windows XP, was developed in Visual Basic Dot Net (vb.Net), to
validate the project. This software was able to receive process and inform on a computer
screen the pressure variable received through the RS-232 serial communication from the
Nordic nRF2401 EVBOARD learning kit. Since the sensor provides a voltage value which
was amplified, the output signal from the amplifier was verified to allow an error of 0,5%
FE
.
The pressure measurement error was bellow 0,25PSIg when submitted to a pressure generated
from the device used as a source pattern (Mityvacc MV6255). The measures provided slightly
different values due to the necessity of an optimization of the circuit board. The overall result
of this project is satisfactory and points to some mechanical improvements, e.g. refinement of
the of induction coils calculations, miniaturization of the circuits and encapsulation of the
circuit installed inside the tire to avoid damage due to vibrations.
LISTA DE FIGURAS
Figura 1.1: Bloco diagrama do circuito Oscilador Primrio. ................................................... 18
Figura 1.2: Bloco diagrama do Circuito de Medio. .............................................................. 19
Figura 1.3: Kit educacional Nordic nRF2401 EVBOARD + nRF configuration board. ......... 20
Figura 2.1: Definio matemtica de presso........................................................................... 22
Figura 2.2: Limite mdio da atmosfera terrestre. ..................................................................... 23
Figura 2.3: Medidor de presso por coluna de mercrio. ......................................................... 24
Figura 2.4: Medidor de presso tipo Tubo de Bourdon............................................................ 29
Figura 2.5: Medidor tipo diafragma(a); Medidor tipo fole(b);................................................. 30
Figura 2.6: Transdutor de presso tipo fole acionando um potencimetro; ............................. 31
Figura 2.7: Transdutor de presso tipo capacitivo.................................................................... 32
Figura 2.8: Resistividade de um condutor sob trao............................................................... 33
Figura 2.9: Strain Gauge........................................................................................................... 33
Figura 2.10: Strain gauge como ponte de wheatstone. ............................................................. 34
Figura 2.11: Transdutor de presso indutivo. ........................................................................... 35
Figura 2.12: Transdutor de presso piezo-eltrico. .................................................................. 36
Figura 2.13: Indutor qualquer representado por um solenide................................................. 40
Figura 2.14: Indutncia Mtua. ................................................................................................ 41
Figura 2.15: Solenides concntricas exemplificando a indutncia mtua.............................. 42
Figura 2.16: Circuito com resistor e indutor - RL . .................................................................. 45
Figura 2.17: Arquitetura interna MSP430x1x2x . .................................................................... 49
Figura 2.18: AC10MEM Registrador de sada do conversor AD . .......................................... 51
Figura 2.19: Arquitetura interna MSP430x1x2x . .................................................................... 52
Figura 2.20: Transformao dos pulsos pelo filtro gaussiano. ................................................. 55
Figura 2.21: Diagrama de blocos do transceiver nRF2401.. .................................................... 57
Figura 2.22: Disposio dos pinos do transceiver nRF2401.. .................................................. 57
Figura 2.23: Formato do pacote gerado pelo nRF2401. ........................................................... 58
Figura 2.24: Diagrama ilustrando a transmisso do nRF2401 em modo ShockBurst
TM
.......... 60
Figura 2.25: Fluxograma de transmisso do nRF2401 em modo ShockBurst
TM
. ................... 61
Figura 2.26: Fluxograma de recepo do nRF2401 em modo ShockBurst
TM
......................... 62
Figura 2.27: Esquema eltrico sugerido para o nRF2401. ....................................................... 64
Figura 2.28: Mdulo TRW-24G. .............................................................................................. 65
Figura 2.29: Sensor ICS-M50 .................................................................................................. 66
Figura 2.30: Dimenses do Sensor ICS-M50 .......................................................................... 67
Figura 2.31: Smbolo de um amplificador operacional. ........................................................... 68
Figura 2.32: Encapsulamento e descrio de pinos do MC34072 ........................................... 68
Figura 2.33: Configurao bsica inversora de amplificador operacional. .............................. 70
Figura 2.34: Configurao bsica no inversora de amplificador operacional. ....................... 70
Figura 3.1: Osciloscpio Digital Agilent 54622D.................................................................... 74
Figura 3.2: Osciloscpio Analgico Hameg Instruments HM303-6........................................ 74
Figura 3.3: Analisador de espectro Rohde & Schwartz FS300. ............................................... 75
Figura 3.4: Bobina primria. .................................................................................................... 78
Figura 3.5: Bobina secundria.................................................................................................. 79
Figura 3.6: Esquema eltrico do oscilador. .............................................................................. 79
Figura 3.7: Esquema eltrico do circuito de recarga da bateria................................................ 80
Figura 3.8: Esquema eltrico do amplificador do sinal enviado pelo sensor ICS-M50. .......... 81
Figura 3.10: Fotolito da placa principal e adaptador. ............................................................... 86
Figura 3.11: Fotolito da placa do sensor ICS-M50. ................................................................. 87
Figura 3.12: Diagrama das conexes bsicas para interfacear com o microcontrolador. ........ 87
Figura 3.13: Diagrama de execuo do programa do microcontrolador. ................................. 89
Figura 3.14: Configurao do mdulo TRW-24G como transmissor. ..................................... 90
Figura 3.15: Transmisso atravs do mdulo TRW-24G, dado.0x3FF. .................................. 91
Figura 3.16: Transmisso de um valor aleatrio atravs do mdulo TRW-24G...................... 91
Figura 3.17: Transmisso de um canal AD = 0, atravs do mdulo TRW-24G...................... 92
Figura 3.18: Espalhamento espectral na transmisso. .............................................................. 93
Figura 3.19: Montagem do circuito de medio e transmisso na roda automotiva. ............... 94
Figura 3.20: Montagem das bobinas na roda automotiva......................................................... 95
Figura 3.21: Formato dos dados enviados pelo kit de aprendizagem Nordic. ......................... 96
Figura 3.22: Interface do software tpms.exe. ........................................................................... 97
Figura 3.23: Mityvacc MV6255. .............................................................................................. 98
LISTA DE GRFICOS
Grfico 2.1: Presso atmosfrica em relao altitude............................................................ 28
Grfico 3.1: Linearidade do sinal de sada do amplificador diferencial................................... 84
LISTA DE TABELAS
Tabela 2.1: Variao da presso atmosfrica com o aumento da altitude. ............................... 25
Tabela 2.2: Descrio das funes dos pinos do transceiver nRF2401.................................... 58
Tabela 3.1: Tabela de equivalncia de fios AWG. ................................................................... 76
Tabela 3.2: Comportamento do circuito amplificador do sinal do sensor ICS-M50................ 83
LISTA DE ABREVIATURAS E SIGLAS
ACLK - Auxiliary clock Sinal de clock auxiliar
AD - Analogic to digital Analgico para Digital
ADC - Analogic to digital converter Conversor analgico para digital
AWG - American wired gauge Bitola de fios Americana
CLK - Clock signal Sinal de clock
CPU - Central Processing Unit Unidade Central de processamento
CRC - Cyclic Redundance Check Cdigo de redundncia cclica
DCO - Digital Controlled Oscillator Oscilador controlado Digitalmente
FIFO - Register Type First-in, First-out Registrador tipo first in, first out
FSK - Frequency Shift Keying Modulao por deslocamento de
Freqncia
GFSK - Gaussian Frequency Shift Keying Modulao Gaussiana por deslocamento
de Freqncia
ISM - Industrial, Scientific and Medical Industrial, Mdica e Cientfica
JTAG - Joint Test Action Group Grupo de acesso para Teste
LVDT - Linear Variable Differential Transformer Transformador Diferencial Linear
Varivel
MCLK - Master Clock signal Sinal de clock mestre
MOSFET - Metal Oxide Semiconductor Field Effect
Transistor
Transistor de Efeito de Campo tipo Metal
Oxido
NiCd - Nickel Cadmium Nquel-Cdmio
PSI - Pressure Square Inch Presso por polegada quadrada
PSIa - Pressure Square Inch Absolute Presso absoluta por polegada quadrada
PSIg - Pressure Square Inch Gauge Presso relativa por polegada quadrada
PWM - Pulse Width Modulation Modulao por largura de pulso
RAM - Random Access Memory Memria de acesso randmico
RF - Radio Frequency Rdio Freqncia
RISC - Reduced Instruction Set Computer Computador com conjunto reduzido de
instrues.
ROM - Read only memory Memria Apenas para Leitura
SAW - Surface acoustic waves Onda acstica de Superfcie
SMCLK - Secondary clock Sinal de clock secundrio
SPI - Serial Peripheral Interface Interface Perifrica Serial
TPMS - Tire Pressure Monitoring System Sistema de monitorao de presso de
pneus
USB - Universal Serial Bus Barramento serial universal
WLAN - Wireless Local Area Network rea de rede sem fio
SUMRIO
1 INTRODUO.............................................................................................................. 17
2 FUNDAMENTOS TERICOS..................................................................................... 21
2.1 INTRODUO........................................................................................................ 21
2.2 PRESSO................................................................................................................. 21
2.2.1 Definio matemtica....................................................................................... 21
2.2.2 Presso isotrpica ............................................................................................. 23
2.2.3 Presso atmosfrica .......................................................................................... 23
2.2.4 Presso relativa ou manomtrica ...................................................................... 26
2.2.5 Mtodos de medio de presso....................................................................... 27
2.2.5.1 Barmetro de mercrio................................................................................. 27
2.2.5.2 Tubo de Bourdon.......................................................................................... 29
2.2.5.3 Transdutores de presso................................................................................ 30
2.2.5.3.1 Transdutores potenciomtricos............................................................... 30
2.2.5.3.2 Transdutores capacitivos ........................................................................ 31
2.2.5.3.3 Transdutores por deformao................................................................. 32
2.2.5.3.4 Transdutores indutivos ........................................................................... 34
2.2.5.3.5 Transdutores piezo-eltricos................................................................... 35
2.3 BATERIAS DE NQUEL-CDMIO....................................................................... 36
2.3.1 Bateria de Nquel-Cdmio................................................................................ 37
2.3.2 Capacidade e vida til das baterias de nquel-cdmio...................................... 37
2.3.3 Mtodos de Carga de baterias de nquel-cdmio.............................................. 38
2.4 INDUTNCIA......................................................................................................... 40
2.4.1 Indutncia Mtua.............................................................................................. 41
2.4.2 Circuitos RL ..................................................................................................... 44
2.4.3 Energia Magntica............................................................................................ 47
2.5 MICROCONTROLADOR - MSP430F1122 ........................................................... 48
2.5.1 Introduo......................................................................................................... 48
2.5.2 Arquitetura do Microcontrolador ..................................................................... 49
2.5.3 Conversor analgico / digital ADC10 ........................................................... 50
2.5.4 Timers............................................................................................................... 53
2.5.4.1 Principais caractersticas dos temporizadores .............................................. 53
2.6 ENLACE POR RDIO FREQNCIA.................................................................. 54
2.6.1 Circuito Integrado nRF2401............................................................................. 54
2.6.1.1 Espalhamento espectral ................................................................................ 55
2.6.1.2 Caractersticas do transceiver nRF2401 ....................................................... 56
2.6.1.3 Transmisso de dados................................................................................... 58
2.6.1.4 Modos de operao do nRF2401.................................................................. 60
2.6.1.4.1 Transmisso ShockBurst
TM
modo ativo ................................................. 60
2.6.1.4.2 Recepo ShockBurst
TM
modo ativo...................................................... 62
2.6.1.4.3 Modo power down.................................................................................. 63
2.6.1.4.4 Modo de habilitao ............................................................................... 63
2.6.1.5 Antena de transmisso ou recepo.............................................................. 63
2.6.1.6 Mdulo TRW-24G Whensing ...................................................................... 65
2.7 SENSOR DE PRESSO M50-100A.................................................................... 66
2.8 AMPLIFICADOR OPERACIONAL MC34072................................................... 67
2.8.1 Configurao bsica inversora.......................................................................... 69
2.8.2 Configurao bsica no inversora................................................................... 70
3 MTODOS E MATERIAIS UTILIZADOS................................................................ 71
3.1 INTRODUO........................................................................................................ 71
3.2 RECURSOS COMPUTACIONAIS......................................................................... 71
3.2.1 Softwares utilizados.......................................................................................... 72
3.3 RECURSOS INSTRUMENTAIS ............................................................................ 73
3.3.1 Instrumentos utilizados..................................................................................... 73
3.4 DIMENSIONAMENTO DOS COMPONENTES UTILIZADOS .......................... 75
3.4.1 Dimensionamento das bobinas ......................................................................... 75
3.4.2 Projeto do oscilador .......................................................................................... 79
3.4.3 Circuito de recarga da bateria........................................................................... 80
3.4.4 Amplificao do sinal enviado pelo sensor de presso .................................... 81
3.5 ELABORAO DAS PLACAS DE CIRCUITO IMPRESSO............................... 84
3.6 PROGRAMAO DO MICROCONTROLADOR................................................ 87
3.6.1 Configurao do mdulo TRW-24G................................................................ 90
3.6.2 Transmisso dos dados atravs do mdulo TRW-24G .................................... 90
3.7 MONTAGEM EM PNEU DE USO AUTOMOTIVO............................................. 93
3.8 SOFTWARE DE RECEPO DOS DADOS......................................................... 95
3.9 CALIBRAO DAS MEDIDAS DE PRESSO................................................... 97
4 RESULTADOS E CONCLUSES............................................................................... 99
REFERNCIAS BIBLIOGRFICAS ............................................................................... 102
APNDICE........................................................................................................................... 104
APNDICE I: Cdigo fonte do programa tpms.exe....................................................... 104
APNDICE II: Cdigo fonte do programa do MSP430F1122. ..................................... 121
ANEXO.................................................................................................................................. 128
ANEXO A: Datasheet do sensor ICS M50-100A. ......................................................... 128
1 INTRODUO
Dos diversos segmentos do mercado, pode-se considerar o segmento automotivo
como um grande mercado para emprego da eletrnica embarcada, um segmento de grande
destaque, com grande foco nos certificados de qualidade e durabilidade. Os consumidores
procuram cada vez mais produtos ecologicamente corretos, de tima qualidade, sem abrir mo
de pagar pouco. Estes fatos estimularam uma constante evoluo dos equipamentos
eletrnicos de produo e pesquisa, gerando processos cada vez mais precisos, com tima
qualidade e desempenho. Surge desta forma a necessidade de produtos simples de grande
aceitao.
O principal objetivo deste trabalho projetar e construir um prottipo de um sistema
de Monitoramento de Presso de Pneu (TPMS), este que ser baseado em trs mdulos
bsicos:
Oscilador Primrio: Circuito oscilador conectado a uma bobina que
funcionar como primrio de um transformador de acoplamento fraco, sendo
este circuito o fornecedor de energia eletromagntica para o circuito de
medio, amplificao, processamento e transmisso situado dentro do pneu,
conforme Figura 1.1.
18
Figura 1.1: Bloco diagrama do circuito Oscilador Primrio.
Circuito de Medio: Consiste em uma bobina cuja funo consiste em
absorver as ondas eletromagnticas emitidas pelo oscilador primrio,
funcionar como o secundrio de um transformador de acoplamento fraco.
Sero utilizados os princpios da induo eletromagntica para prover, nesta
bobina secundria, uma tenso mnima suficiente para alimentar o circuito de
medio, amplificao, processamento e transmisso, conforme Figura 1.2.
O processador a ser utilizado o MSP430, fabricado pela empresa
Texas Instruments, cujas caractersticas relevantes so o baixo consumo e
versatilidade, fcil programao com compilador e simulador com verso de
demonstrao limitada a dois quilobytes. O sinal de presso absoluta no
interior do pneu ser capturado por um sensor de presso em forma de ponte
de Wheatstone, de baixo consumo e com sada diferencial com fundo de
escala de 60mV. Surge ento a necessidade de amplificar este sinal, para ser
interpretado na entrada analgica do microcontrolador, para isto ser
implementado um amplificador com o circuito integrado fabricado pela
19
empresa Motorola, o MC34072. Uma vez o sinal amostrado, ele ser
condicionado e transmitido de forma serial para o mdulo transmissor TRW-
24G fabricado pela empresa Wenshing.
O mdulo TRW-24G composto de uma antena e um circuito
integrado nRF2401 fabricado pela empresa Nordic. Este circuito nRF2401
possui algumas caractersticas relevantes ao projeto, a mais importante o
modo de transmisso Shockburst
TM
onde o nRF2401 acumula os dados em
buffer e os transmite todos de uma vez, permanecendo o restante do tempo
em repouso garantindo assim o mnimo consumo e grande confiabilidade dos
dados, pois ele automaticamente implementa Cdigo de Redundncia Cclica.
Neste projeto haver um mdulo configurado com transmissor e outro como
receptor, sendo que ambos estaro na faixa de 2412MHz, com a transmisso
das variveis em um pacote de trinta e dois bits de dados teis, o tamanho
deste pacote foi configurado conforme a necessidade do projeto.
Figura 1.2: Bloco diagrama do Circuito de Medio.
20
Circuito de Recepo: para a validao do projeto ser elaborado um software
que receber os dados do mdulo receptor via RS-232 e indicar o valor da
presso na tela de um computador pessoal.
O mdulo receptor ser um kit didtico composto por duas placas, a nRF2401
EVBOARD, que tem as mesmas caractersticas bsicas do mdulo TRW-24G, e a nRF
configuration board que j possui agregado uma interface serial para comunicao RS-232,
permitindo de maneira simples confirmar se a transmisso est dentro dos parmetros
desejados, conforme Figura 1.3.
Lembrando que o foco deste projeto est em adquirir, processar e enviar a
informao. Sendo que a recepo ser implementada unicamente como forma de validao.
Sendo que para a realizao do projeto e construo do prottipo funcional sero elaboradas
placas de circuito impresso e bobinas, o processador receber software elaborado em
linguagem C e tambm haver a especificao e dimensionamento de todos os componentes.
Figura 1.3: Kit educacional Nordic nRF2401 EVBOARD + nRF configuration board.
Fonte: (Product Description - Evaluation Board nRF2401, 2003)
21
2 FUNDAMENTOS TERICOS
2.1 INTRODUO
Os fundamentos tericos esto divididos em sete partes. Na Seo 2.2 sero
apresentados o estudo da grandeza presso e as diversas formas de medio. Na Seo 2.3
sero apresentados os fundamentos bsicos sobre baterias de nquel cdmio e as diversas
formas de recarreg-las. Na Seo 2.4 ser apresentado o princpio fsico da induo
eletromagntica. Posteriormente na Seo 2.5 sero expostos os princpios bsicos da
arquitetura e utilizao do microcontrolador MSP430. Na Seo 2.6 sero expostos os modos
de transmisso e utilizao do enlace de rdio freqncia proporcionado pelo nRF2401
fabricado pela Nordic. Enfim nas Sees 2.7 e 2.8 sero apresentados o sensor e o
amplificador operacional a serem utilizados no projeto.
2.2 PRESSO
2.2.1 Definio matemtica
22
A fsica relaciona as grandezas fora e rea atravs de uma grandeza fsica: a presso.
A presso definida como a fora por unidade de rea. Seja a fora F
r
que atua
perpendicularmente sobre a rea S indicada na Figura 2.1 (Bonjorno, 1993).
Figura 2.1: Definio matemtica de presso.
Fonte: (Bonjorno, 1993).
No sistema internacional de unidade S.I., aprovado em outubro de 1960 na XI
CONFERENCIA GERAL dos pesos e medidas CCPM em Paris, passou a ser definida em
termos de Newton por Metro quadrado. (Fialho, 2004).
S
F
p = (2.1)
A unidade Newton por Metro quadrado, indicado N/m
2
, denominada Pascal e
abreviada como Pa, nomeada a partir do cientista Blaise Pascal. Ento:
Pa pascal
m
N
= =
2
(2.2)
Outra unidade de presso que tambm utilizada o bar, sendo que:
Pa bar
5
10 1 = (2.3)
23
2.2.2 Presso isotrpica
Quando uma presso age igualmente em todas as direes denominada de isotrpica,
por exemplo, os lquidos que exercem a mesma presso em todas as direes e a uma certa
profundidade so o caso mais comum, a presso exercida em toda atmosfera, mais conhecida
como presso atmosfrica.
2.2.3 Presso atmosfrica
A presso exercida pela atmosfera chamada de presso atmosfrica. Em torno da
Terra h uma camada de ar denominada atmosfera, cuja altura da ordem de dezoito
quilmetros, conforme Figura 2.2 (Bonjorno, 1993).
Figura 2.2: Limite mdio da atmosfera terrestre.
Fonte: (Bonjorno, 1993).
Essa massa de ar exerce presso sobre todos os corpos no seu interior, para determinar
o valor da presso atmosfrica, E. Torricelli (1608-1647) utilizou um tubo cheio de mercrio
24
de um metro de comprimento. Colocando a extremidade livre do tubo ao nvel do mar, e a
0C, num recipiente contendo mercrio, ele verificou que a coluna de mercrio no tubo
alcanou setenta e seis centmetros. Conforme Figura 2.3 (Bonjorno, 1993).
Figura 2.3: Medidor de presso por coluna de mercrio.
Fonte: (Fialho, 2004).
Como a coluna de mercrio um instrumento preciso para medio da presso,
podemos considerar que uma presso atmosfrica normal :
2
/ 7 , 14 760 76 1 in lb mmHg cmHg atm = = = (2.5)
Conforme as experincias de Torricelli, cada cm
2
da superfcie terrestre suporta uma
coluna de atmosfera de cerca de um quilograma.
As foras exercidas sobre os corpos pela atmosfera so considerveis. Elas passam
despercebidas porque nossa presso interna de mesmo valor e compensa seus efeitos.
25
2
5
10 . 01325 , 1
m
N
P
atm
= (2.4)
Podemos comprov-las atravs de uma experincia muito simples: aquecendo-se um
pouco de gua no interior de uma lata e tampando-a enquanto estiver quente, a presso
atmosfrica produzir uma deformao na lata com o resfriamento (Bonjorno, 1993).
O ar exerce a mesma presso em todos os pontos independente da posio em que
estes se encontram, essa presso gasosa devida ao nmero de colises das partculas com as
superfcies e tal presso constante. Por outro lado, na atmosfera o ar um gs livre porque
ela no tem limitaes, somente a superfcie da Terra. Como as molculas gasosas esto
sempre sujeitas as foras gravitacionais, elas tendem a ficar mais prximo superfcie
terrestre. Por isso, a densidade do ar diminui com a altitude, isto , o ar fica mais rarefeito,
conseqentemente diminui tambm a presso atmosfrica, mas no de maneira linear em
relao ao aumento de altitude, conforme indica a Tabela 2.1(Bonjorno, 1993).
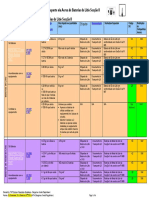
Tabela 2.1: Variao da presso atmosfrica com o aumento da altitude.
Fonte: (Bonjorno, 1993)
Altitude
(metros)
Presso
(mmHg)
0 760,0
200 741,1
2000 593,8
10000 193,0
16201 73,0
20022 40,0
26
2.2.4 Presso relativa ou manomtrica
Presso manomtrica, P
man
, a medida de uma presso desconhecida em relao
presso atmosfrica, P
atm
. A soma da presso manomtrica com a presso atmosfrica
tambm conhecida como presso relativa. (Fialho, 2004).
Se for comparada a espessura da atmosfera em relao ao planeta, notamos que a
atmosfera como uma casca muito fina e por isso a presso varia entre o mar e uma
montanha. A variao da presso atmosfrica, ou presso externa ao organismo pode causar
incmodo principalmente nos ouvidos, como um zumbido. Pode-se sentir o efeito da presso
quanto ao deslocamento em diferentes altitudes porque dentro do ouvido existe uma
membrana muito sensvel variao de presso que o tmpano. O tmpano volta posio
normal logo depois de alguns minutos. Outra curiosidade quanto aos pneus de maneira
geral, que conforme o atrito gerado durante o deslocamento fornece calor, as molculas de ar
se expandem e aumentam a presso interna. Quando o ar dentro do pneu esfria, as molculas
voltam ao tamanho natural e a presso reduz.
Como a vedao da roda nunca perfeita, quando a presso aumenta, parte do ar se
perde, por isso deve-se calibrar constantemente os pneus, mas sempre com eles frios. E
tambm recomendvel trocar a vlvula de enchimento da roda, no caso dos pneus sem
cmera, sempre que trocar os pneus, mantendo uma boa capacidade de vedao. Uma
alternativa as variaes de temperatura do ar dentro dos pneus uma calibragem com
atm man rel
P P P + =
(2.6)
27
nitrognio, sendo que a vantagem a ausncia de vapor de gua na composio, o que ajuda a
manter a temperatura interna mais baixa, sem causar alteraes de presso.
Quando o pneu est completamente vazio, a presso manomtrica ou presso relativa
nula, e a presso absoluta no seu interior igual presso atmosfrica. A presso P, chamada
presso absoluta o resultado da soma da presso manomtrica ou presso relativa e a presso
atmosfrica. (Bonjorno, 1993).
2.2.5 Mtodos de medio de presso
2.2.5.1 Barmetro de mercrio
O barmetro o instrumento para medir presso da atmosfera, foi provavelmente o
primeiro medidor de presso. O mrito coube a Evangelista Torricelli, fsico italiano, que, em
1644, realizou a experincia de inverter um tubo de vidro, fechado em uma extremidade e
cheio de mercrio, em uma cuba tambm cheia de mercrio. Observou que o nvel do
mercrio se estabilizava em um valor constante (Bonjorno, 1993).
Entretanto, Torricelli no explicou precisamente a causa do fenmeno. Atribuiu ao
"peso do ar", sem mais consideraes. Em 1648, Blaise Pascal, fsico e matemtico francs,
encontrou a explicao adequada, isto , a coluna de mercrio era mantida pela presso do ar
e ainda previu que ela diminuiria com o aumento da altitude.
A Figura 2.3 mostra o arranjo bsico de um barmetro de mercrio muito comum,
com uma escala graduada. A altura da coluna lida diretamente em uma escala, onde a
extremidade superior da coluna est praticamente sob vcuo e, portanto, presso nula. E a
28
superfcie do mercrio na cuba est submetida presso da atmosfera. Conforme equao da
esttica dos fluidos, temos a relao entre a presso e a altura da coluna:
h g P
atm
. . =
(2.6)
Onde:
P
atm
: presso atmosfrica.
: massa especfica do mercrio.
g: acelerao da gravidade.
h: diferena de altura
Existe na prtica uma relao linear entre altura da coluna e presso da atmosfera. No
nvel do mar, a altura da coluna de mercrio 760 mm e este valor foi adotado como
referncia para a presso atmosfrica em nvel do mar.
A unidade Torr, pouco usada, foi definida como a presso equivalente a uma coluna
de mercrio de um milmetro de altura. Portanto, presso atmosfrica em nvel do mar
equivale a 760 Torr. Mas unidades obsoletas devem ser evitadas, utilizando sempre que
possvel unidades conforme Sistema Internacional:
Assim, Presso atmosfrica em nvel do mar = 101 325 N/m
2
= 1,01325 bar. Um
barmetro pode ser convertido em um medidor de altitude, um altmetro, mediante simples
mudana de escala. (Fialho, 2004). A presso atmosfrica diminui com o aumento da altitude,
conforme Grfico 2.1 a partir dos dados apresentados na Tabela 2.1.
Grfico 2.1: Presso atmosfrica em relao altitude.
29
Barmetro um instrumento simples e pode ser construdo de outras formas. O
barmetro de mercrio ocupa espao, pouco prtico para aplicaes portteis.
2.2.5.2 Tubo de Bourdon
Os medidores sem lquido usam em geral a deformao elstica das paredes de um
elemento, normalmente metlico, submetidas presso do fluido. O manmetro de tubo de
Bourdon certamente um dos mais utilizados. Consistem em um tubo de paredes finas e
seo transversal aproximadamente retangular sendo fabricado na forma de uma curva
conforme exemplo da Figura 2.4. Sob ao da presso P, o raio da curva varia e o movimento
aciona um mecanismo de engrenagens e ponteiro para indicao da presso.
Figura 2.4: Medidor de presso tipo Tubo de Bourdon.
Fonte: (Fialho, 2004).
O esboo da figura apenas ilustrativo. Outros formatos podem existir. O tubo de
Bourdon pode ser fabricado em forma de espiral ou hlice para maior sensibilidade. Existem
outros medidores que usam sistemas de diafragma ou fole, respectivamente (a) e (b),
conforme Figura 2.5. O fole normalmente mais sensvel que o diafragma.
30
Figura 2.5: Medidor tipo diafragma(a); Medidor tipo fole(b);
Fonte: (Fialho, 2004).
O movimento do diafragma ou do fole pode ser usado para acionar ponteiros de forma
similar ao anterior, chaves eltricas de contato seco e em alguns casos pode estar acoplado em
um potencimetro.
2.2.5.3 Transdutores de presso
A evoluo da tecnologia possibilitou o desenvolvimento de dispositivos mais
avanados do que os simples indicadores locais de presso. Os transdutores ou sensores
eltricos de presso convertem os valores em grandezas eltricas que so usadas local ou
remotamente, para leitura e controle de processos.
2.2.5.3.1 Transdutores potenciomtricos
Transdutores potenciomtricos so dispositivos de construo simples e operam
conforme esquema da Figura 2.6. Um fole ou tubo de Bourdon podem acionar um
potencimetro que converte os valores de presso em valores de resistncia eltrica.
31
Figura 2.6: Transdutor de presso tipo fole acionando um potencimetro;
Fonte: (Fialho, 2004).
So de baixo custo, pode operar sob diversas condies, o sinal pode ter intensidade
boa, dispensando amplificaes. Mas o mecanismo produz desvios inerentes e tem
sensibilidade a variaes de temperatura. Nestes mecanismos sempre haver um desgaste
natural do potencimetro. Em geral usados para presses de 0,035 a 70 MPa. Preciso na
faixa de 0,5 a 1% do fundo de escala sem considerar as variaes de temperatura.
2.2.5.3.2 Transdutores capacitivos
Nos transdutores capacitivos o diafragma funciona como armadura comum de dois
capacitores em srie. O deslocamento do diafragma devido variao de presso resulta em
aumento da capacitncia de um e diminuio de outro. E um circuito oscilador pode detectar
essa variao. A Figura 2.7 mostra o esquema de um medidor capacitivo diferencial de
presso, mas pode ser simples com uma das cmaras fechada. Usados para presses desde
vcuo at cerca de 70 MPa. Em mode diferencias medem diferenas a partir de
aproximadamente 2,5 Pa com preciso de at 0,01 % do fundo de escala, de maneira geral
possuem boa estabilidade trmica.
32
Figura 2.7: Transdutor de presso tipo capacitivo.
Fonte: (site: MSPC engenharia)
2.2.5.3.3 Transdutores por deformao
O transdutor de deformao usa um sensor tipo "strain gauge" para indicar a
deformao do diafragma provocada pela presso. Pode medir presso diferencial, ou ter
construo simples para medio de presso absoluta com apenas uma entrada. Baseia-se no
princpio de variao da resistncia de um fio, mudando as suas dimenses. Para variar a
resistncia de um condutor deve-se ter em conta a equao geral da resistncia:
(2.7)
33
Mostrando que a resistncia eltrica de um condutor diretamente proporcional
resistividade e ao comprimento e inversamente proporcional a rea da seo transversal. A
maneira mais prtica de alterar as dimenses de um condutor tracionar o mesmo no sentido
axial como mostrado na Figura 2.8:
Figura 2.8: Resistividade de um condutor sob trao..
Fonte: (Fialho, 2004)
Seguindo esta linha de raciocnio, conclu-se que para um comprimento L ocorrer
uma variao L, sendo assim para um comprimento 10 x L se obter uma variao de 10 x
L, ou seja , quanto maior o comprimento do fio, maior ser a variao da resistncia obtida e
maior a sensibilidade do sensor para uma mesma presso (fora) aplicada. O sensor consiste
de um fio firmemente colado sobre uma lmina de base, dobrando-se to compacto quanto
possvel. A montagem denomina-se tira extensiomtrica como se pode observar na Figura 2.9:
Figura 2.9: Strain Gauge.
Fonte: (Fialho, 2004)
Observa-se que o fio, apesar de solidamente ligado lmina de base, precisa estar
eletricamente isolado da mesma. Uma das extremidades da lmina fixada em um ponto de
apoio rgido enquanto a outra extremidade ser o ponto de aplicao de fora.
34
Da fsica tradicional sabido que um material ao sofrer uma flexo, suas fibras
internas sero submetidas a dois tipos de deformao: trao e compresso. As fibras mais
externas sofrem um alongamento com a trao, pois pertencem ao permetro de maior raio de
curvatura, enquanto as fibras internas sofrem uma reduo de comprimento (menor raio de
curvatura). A ligao ideal para um Strain Gauge com quatro tiras extensiomtricas o
circuito em ponte de Wheatstone, como mostrado na Figura 2.10, que tem a vantagem
adicional de compensar as variaes de temperatura ambiente, pois todos os elementos esto
montados em um nico bloco.
Figura 2.10: Strain gauge como ponte de Wheatstone.
Fonte: (site: MSPC engenharia)
Possuem preciso de aproximadamente 0,25% do fundo de escala. Existem variaes
para as mais diversas faixas de presses (0,001 a 1400 MPa).
2.2.5.3.4 Transdutores indutivos
Os transdutores indutivos tm sua estrutura conforme Figura 2.11, o ncleo de um
transformador se move de acordo com a presso sobre o diafragma. Supondo uma situao
inicial simtrica, se uma tenso alternada aplicada no primrio, a tenso de sada ser nula
porque os secundrios esto ligados em oposio. O desequilbrio provocado pelo movimento
35
do diafragma aumenta a tenso em um secundrio e diminui no outro e o circuito transforma
isso em sinal correspondente presso.
Figura 2.11: Transdutor de presso indutivo.
Fonte: (Fialho, 2004)
Esse tipo de transformador denominado transformador linear diferencial varivel. A
estabilidade trmica boa, mas so sensveis a campos magnticos e a vibraes. Presses nas
faixas de 0,2 a 70 MPa.
2.2.5.3.5 Transdutores piezo-eltricos
Os transdutores piezo-eltricos usam o efeito de mesmo nome para gerar o sinal
eltrico, se o circuito processa apenas a tenso gerada devido ao efeito piezo-eltrico, o
dispositivo registra apenas variaes de presso, pois a tenso cai rapidamente em condies
estticas. Isso pode ser muito til em algumas aplicaes. Existem tambm circuitos que
detectam a freqncia de ressonncia do cristal e, portanto, podem medir presses estticas.
So sensveis a variaes de temperatura e a instalao requer cuidados especiais.
36
Uma desvantagem que deve ser mencionada sua dependncia na temperatura, mas
estes efeitos podem ser compensados por um circuito corretor, ou submergindo o conjunto
diafragma sensor em leo, tal como mostra a Figura 2.12. (Fialho, 2004).
Figura 2.12: Transdutor de presso piezo-eltrico.
Fonte: (Fialho, 2004).
2.3 BATERIAS DE NQUEL-CDMIO
Bateria um recipiente que contm elementos qumicos necessrios para gerar
energia eltrica atravs de reaes qumicas. No projeto do TPMS, optou-se pela utilizao da
bateria de Nquel-Cdmio, pois sendo de fcil aquisio no mercado, assim garante uma
facilidade de substituio em caso de manuteno futura.
37
2.3.1 Bateria de Nquel-Cdmio
Nas baterias de nquel cdmio, o plo positivo e o plo negativo encontram-se no
mesmo recipiente, com o plo positivo (ou ctodo) coberto de Hidrxido de Nquel e o plo
negativo (ou nodo), coberto de material sensvel ao cdmio. Ambos so isolados por um
separador. Os plos esto imersos em uma substncia eletroltica, que conduz ons,
geralmente uma soluo de Hidrxido de Potssio (KOH). As baterias de Nquel e Cdmio
(Ni-Cd) so dos tipos mais comuns existentes no mercado.
2.3.2 Capacidade e vida til das baterias de nquel-cdmio
A medida bsica utilizada para a capacidade de uma bateria recarregvel o mili
mpere/hora (mAh). Isto significa que, se a capacidade de uma bateria 60 mAh, ela pode
produzir 60 milsimos de mpere em uma hora, logo sua tenso ser reduzida a metade.
As baterias de nquel-cdmio tm uma vida til aproximada de 700 ciclos de recarga.
Entretanto, alguns cuidados podem ser tomados para aumentar a vida til da bateria como, por
exemplo, cuidado na conservao e no manuseio, fazer as recargas com o tempo determinado
pelo fabricante, esperar que a carga da bateria esteja baixa antes de recarreg-la e no
interromper as recargas antes do tempo recomendado.
Existem algumas caractersticas importantes sobre as baterias de Ni-Cd:
Sofre do efeito memria facilmente, mas esse efeito pode ser amenizado realizando
uma descarga completa, seguida de uma carga lenta por um perodo superior a doze
horas;
Tem pouca capacidade de corrente se comparado com bateria de ons de ltio;
38
Altamente txica;
Suporta muitos ciclos de recarga e, portanto sua vida til relativamente longa se a
recarregar sempre conforme as instrues do fabricante, mas normalmente ningum
consegue isso e, portanto na prtica a vida til dela acaba sendo bem menor do que
poderia;
2.3.3 Mtodos de Carga de baterias de nquel-cdmio
Corrente Constante por Tempo Definido: Neste tipo de carga aplica-se uma corrente
controlada constante pela bateria por um perodo determinado limitando assim o
tempo de carga. Isso pode evitar a sobrecarga da mesma;
Tenso Constante: Tambm conhecido como carga em flutuao, este mtodo aplica
uma tenso constante nos plos da bateria. A corrente de carga ser determinada pelas
caractersticas eltricas e qumicas da bateria em carga. Isso no recomendvel uma
vez que se a bateria estiver com suas grades internas em curto circuito a corrente
circulante pelo sistema ser elevadssima. Esse mtodo tem um inconveniente que o
elevado tempo de carga, uma vez que quanto mais energia a bateria absorve, menor a
corrente de carga aplicada na mesma;
Tenso Constante com Limite de Corrente: Esse mtodo idntico ao anterior mas
com a proteo de sobre corrente evitando assim problemas de sobrecarga do sistema;
Temperatura Mxima ou Constante: Nesse mtodo a corrente de carga bastante
elevada, limitada apenas pela temperatura da bateria. Isso reduz muito o tempo de
carga sendo o mtodo mais rpido de carga entre todos. O inconveniente do mtodo de
temperatura constante o aparato mecnico de refrigerao que deve ser montado para
que se mantenha a temperatura da bateria sempre constante no limite mximo;
39
Corrente Constante seguido de Tenso Constante: Esse mtodo bastante interessante
sendo bastante utilizado pelos sistemas existentes hoje no mercado. A bateria
carregada com uma corrente constante at que atinja a sua tenso de flutuao
(aproximadamente 10% acima da sua tenso nominal), quando ento o carregador
passa a atuar no modo de tenso constante, evitando assim sobrecarga e mesmo a auto-
descarga da mesma.;
Corrente Constante seguido de Tenso Corrigida: Da mesma maneira que no mtodo
anterior, neste a corrente constante durante a carga at que a bateria atinja sua tenso
de carga (aproximadamente 20% acima da sua tenso nominal) quando ento o
carregador comuta para a tenso de flutuao mantendo a bateria neste estado
indefinidamente. Este mtodo carrega melhor a bateria que o mtodo anterior;
Corrente Constante seguido de Tenso Corrigida e Queda de Corrente: Esse o
mtodo que melhor carrega a bateria, sem nenhum risco de dano a mesma. Semelhante
ao anterior, a diferena neste que quando atinge a tenso de carga, ele espera at que
a corrente da bateria caia abaixo de 1% da sua capacidade nominal para que ento
comute para a tenso de flutuao, o que garante uma carga mais eficiente da mesma;
Delta de Tenso Zero ou Negativo: Neste tipo de carga aplica-se uma corrente
constante pela bateria de maneira que sua tenso vai subindo (absorvendo energia) at
um ponto em que isso no ocorre mais. Neste ponto, em que a tenso no sobe mais,
termina-se a carga sob a condio de Delta V Zero. Em alguns tipos de bateria, aps o
ponto de delta de tenso zero, a tenso comea a cair produzindo uma variao de
tenso para baixo, caracterizando o trmino por Delta V Negativo.
40
2.4 INDUTNCIA
Uma corrente varivel no tempo que percorre um indutor faz aparecer uma fora eletro
motriz nos seus terminais e esta fora proporciona a taxa de variao da corrente em relao
ao tempo, a constante de proporcionalidade L chamada de indutncia ou auto-indutncia,
conforme Figura 2.13 (Halliday, 2006).
Figura 2.13: Indutor qualquer representado por um solenide.
Fonte: (Halliday, 2006).
O fluxo magntico atravs de um circuito est relacionado corrente no circuito por:
LI
m
=
(2.8)
Onde, L auto-indutncia do circuito, que depende da geometria do circuito. A
unidade SI de indutncia o Henry (H):
A
m T
A
Wb
H
2
1 1 1
= =
(2.9)
A auto-indutncia de um solenide de n espiras com o comprimento e a rea da
seo reta A, dada por:
l A n
I
L
m 2
0
= = (2.10)
41
Se, eventualmente, estiver perto de outro circuito, com uma corrente I
2
, h um fluxo
magntico atravs do primeiro circuito, proveniente do segundo circuito, dado por:
2
MI
m
=
(2.11)
Onde M a indutncia mtua, que depende da disposio geomtrica dos dois circuitos
(Tipler, 2000).
2.4.1 Indutncia Mtua
Quando dois ou mais circuitos indutivos esto prximos uns dos outros, o fluxo
magntico atravs de um circuito depende no somente da corrente no prprio circuito, mas
tambm das correntes nos circuitos prximos. Seja I
1
, a corrente no circuito um, e I
2
a
corrente no circuito dois. O campo magntico em L
2
tem parcelas devido influncia de I
1
, e
I
2
, tal como apresentado na Figura 2.14.
Figura 2.14: Indutncia Mtua.
42
Esses dois campos so proporcionais as correntes que produzem. Podemos ento
descrever o fluxo atravs do circuito indutivo como a soma de duas partes, uma delas
proporcional corrente I
1
e a outra proporcional corrente I
2
(Tipler, 2000).
1 12 2 2 2
I M I L
m
+ =
(2.12)
Onde L
2
a auto-indutncia do circuito dois e
12
M
a indutncia mtua dos dois
circuitos. A indutncia mtua depende da geometria da disposio dos dois circuitos, se os
circuitos estiverem muito afastados um do outro, o fluxo magntico da corrente I
1
atravs do
circuito dois ser pequeno e a indutncia mtua ser pequena. Uma equao semelhante
primeira pode ser escrita para o fluxo magntico atravs do circuito um, onde L
1
auto-
indutncia do circuito um (Tipler, 2000):
2 21 1 1 1
I M I L
m
+ =
(2.13)
A Figura 2.15 mostra um solenide comprido, de pequeno dimetro, com espiras
enroladas sem espao entre as espiras, no interior de um outro solenide, tambm com as
espiras enroladas sem espaos entre as espiras, com o mesmo comprimento, mas com um raio
maior.
Figura 2.15: Solenides concntricas exemplificando a indutncia mtua.
Fonte: (Tipler, 2000).
43
Nesta situao podemos calcular a indutncia mtua dos dois solenides. Seja o
comprimento comum dos dois, seja n
1
o nmero de espiras no solenide interno e r
1,
o seu
raio, e seja n
2
, o nmero de espiras do solenide externo e r
2
o seu raio. Vamos calcular a
indutncia mtua
12
M
admitindo que o solenide interno tenha uma corrente I
1
, e calculando
o fluxo magntico
2 m
dessa corrente que passa pelo solenide externo. O campo magntico
da corrente no solenide interno constante no espao interno do solenide e tem o mdulo
(Tipler, 2000):
1 1 0 1
I n B =
(2.14)
Fora do solenide interno, o seu campo magntico nulo. O fluxo deste campo
magntico, atravs do solenide externo, ento:
( ) ( ) ( )
1
2
1 1 2 0
2
1 1 2
2
1 1 2 2
I r n n r B n r B N
m
l l = = =
(2.15)
A rea para o clculo do fluxo atravs do solenide externo no foi a rea da seo reta
deste solenide,
2
2
r , mas a rea da seo reta do solenide interno,
2
1
r pois no h campo
magntico no exterior do solenide interno. A indutncia mtua
12
M ento (Tipler, 2000):
2
1 1 2 0
1
2
12
r n n
I
M
m
l = =
(2.16)
Vamos calcular
21
M achando o fluxo magntico, atravs do solenide interno, do
campo de uma corrente I
2
no solenide externo. Quando o solenide externo conduzir a
44
corrente I
2
, haver um campo magntico uniforme B
2
no seu interior, dado pela equao a
seguir, com I
2
no lugar de I
1
e n
2
no de n
1
(Tipler, 2000):
2 2 0 2
I n B =
(2.17)
O fluxo magntico no interior do solenide interno ento:
( ) ( ) ( )
2
2
1 1 2 0
2
1 1
2
1 2 1 1
2 I r n n r B n r B N
m
l l = = = (2.18)
A rea que aparece na frmula
2
1
r , pois a rea da seo reta do solenide interno, e
o campo magntico uniforme em qualquer ponto no interior deste solenide. As equaes
so idnticas, isto ,
21
M =
12
M . Pode-se demonstrar que esse um resultado geral. A
indutncia mtua
21
M ento (Tipler, 2000):
2
1 1 2 0
2
1
21
r n n
I
M
m
l = =
(2.19)
2.4.2 Circuitos RL
A auto-indutncia de um circuito impede que a corrente aumente ou diminua
bruscamente. Os circuitos que incluem bobinas e solenides com muitas espiras tm uma
auto-indutncia grande. Uma destas bobinas, ou destes solenides, o que denomina um
indutor. Podemos muitas vezes desprezar a auto-indutncia do restante do circuito diante da
indutncia de um indutor.
45
Um circuito com um resistor e um indutor um circuito RL. Uma vez que todos os
circuitos tm resistncia e auto-indutncia, a anlise de um circuito RL, pode ser aplicada,
num certo sentido, a todos os circuitos. Tambm, todos os circuitos tm capacitncia entre
partes do circuito que estejam em potenciais diferentes (Tipler, 2000).
A Figura 2.16 mostra um circuito RL no qual uma indutncia L e uma resistncia R
esto em srie com uma bateria de f.e.m.
0
, e com uma chave S. Vamos admitir que a
resistncia R inclui a resistncia da bobina do indutor e que a indutncia do resto do circuito
seja desprezvel em comparao com a indutncia do indutor. A chave est inicialmente
aberta, e no h corrente no circuito. Logo depois de a chave ser fechada, a corrente continua
a ser zero, mas esta variando a uma taxa dt dI / e h uma fora contra-eletromotriz dt LdI / no
indutor (Tipler, 2000).
Figura 2.16: Circuito com resistor e indutor - RL.
Fonte: (Tipler, 2000).
No diagrama do circuito, os sinais mais e menos, no indutor, indicam a direo da
f.e.m. quando a corrente estiver crescendo, isto , quando dt dI / for positiva. Logo depois de
a chave ter sido fechada, h uma corrente I no circuito e uma queda de potencial I x R no
resistor, com a regra das malhas, de Kirchhoff, podemos escrever para este circuito (Tipler,
2000):
0
0
=
dt
dI
L IR (2.20)
46
Podem-se perceber muitas caractersticas da corrente neste circuito a partir desta
equao, mesmo sem resolv-la. Inicialmente, logo depois de a chave ter sido fechada, a
corrente zero e a fora contra-eletromotriz dt LdI / igual a f.e.m. da bateria
0
. A taxa
inicial de variao da corrente , pela equao a seguir (Tipler, 2000):
L dt
dI
0
0
(2.21)
Quando a corrente aumenta, a queda de potencial IR tambm aumenta, e a taxa de
variao da corrente diminui. Depois de um curto intervalo de tempo, a corrente tem um certo
valor I e a taxa de variao da corrente (Tipler, 2000):
L
IR
L dt
dI
=
0
(2.22)
Neste instante, a corrente continua a crescer, mas a taxa de variao da corrente
menor que a taxa de t = 0. O valor final da corrente pode ser calculado fazendo dt dI / igual a
zero. Assim, este valor final (Tipler, 2000):
L
I
f
0
= (2.23)
47
2.4.3 Energia Magntica
necessrio trabalho para provocar uma corrente atravs de um indutor. Pode-se
constatar a existncia deste trabalho quando se multiplica cada termo da equao a seguir pela
corrente I e reordenarmos o resultado (Tipler, 2000):
dt
dI
LI R I I + =
2
0
(2.24)
O termo I
0
a potncia debitada pela bateria. A parcela R I
2
a potncia dissipada
como calor no resistor presente no circuito. A parcela
dt
dI
LI a taxa de injeo de energia no
indutor, vem ento (Tipler, 2000):
dt
dI
LI
dt
dU
m
= (2.25)
Pode-se achar a energia final no indutor pela integrao desta equao, desde o tempo
t = 0, quando a corrente nula, at o tempo t = , quando a corrente atingiu a corrente final I
f
,
Assim a energia num indutor, com a corrente I dada por (Tipler, 2000):
2
2
1
LI U
m
= (2.26)
No processo de se fazer circular uma corrente num indutor, provoca-se um campo
magntico no espao envolvido pelas espiras do indutor. O trabalho efetuado para fazer a
corrente passar pelo indutor pode ser imaginado como o trabalho necessrio para gerar o
campo magntico. Isto , pode-se imaginar que a energia num indutor seja a energia do campo
magntico do indutor. No caso de um solenide, o campo magntico est relacionado
48
corrente I e ao nmero de espiras n
e a auto-indutncia por l A n L
2
0
= , onde A a seo
reta do solenide e o seu comprimento. Substituindo I = n B
0
/ e L =
0
n
2
A. A grandeza
A o volume no espao interno no solenide que contm o campo magntico (Tipler, 2000).
A energia por unidade de volume a densidade de energia magntica
m
. Mediante o
caso especial do campo magntico num solenide, o resultado geral. Isto , sempre que
houver um campo magntico no espao, a energia magntica por unidade de volume dada
pela equao. (Tipler, 2000).
2.5 MICROCONTROLADOR - MSP430F1122
2.5.1 Introduo
O microcontrolador utilizado neste trabalho o MSP430F1122, fabricado pela Texas
Instrument. Alm de possuir uma boa versatilidade este microcontrolador satisfaz os
requisitos de dimenso compacta e baixo consumo de energia, tornando-se ideal para a
aplicao que visa o menor consumo de energia.
O MSP430F1122 possui uma CPU RISC de 16 bits, com um sistema de clock flexvel
e perifricos analgicos e digitais. Com uma CPU moderna e os perifricos modulares
mapeados na memria o microcontrolador oferece solues para diversas aplicaes.
Outra caracterstica importante deste microcontrolador o conversor AD de 10 bits,
possibilitando a digitalizao dos sinais analgicos capturados. Dentre outras vantagens no
0
2
2
B
m
=
(2.27)
49
emprego deste microcontrolador destacam-se: programao e depurao on-board atravs de
uma interface JTAG.
2.5.2 Arquitetura do Microcontrolador
O MSP430F1122 possui comunicao interna com diferentes etapas. Para ser
programado, armazena a configurao nos registros de memria, permitindo a comunicao
com perifricos e sincronizao com seus clocks (MSP430 Users guide, 2006).
O MSP430 possui sinais de clock internos: MCKL como clock principal, SMCLK
como clock secundrio e ACLK como clock auxiliar. Os trs sinais so gerados em diferentes
fontes dentro do modo oscilador do chip (MSP430 Users guide, 2006).
O clock auxiliar de baixa freqncia, ACLK, pode ser configurado diretamente com
um cristal externo de 32kHz. Esse cristal usado para manter a CPU em estado de espera com
baixo consumo de energia (MSP430 Users guide, 2006).
A arquitetura interna do microcontrolador em estudo apresentada na Figura 2.17:
Figura 2.17: Arquitetura interna MSP430x1x2x .
Fonte: MSP430 datasheet.
50
O MSP430 possui um nico espao de memria compartilhado com registradores de
funes especiais, perifricos, RAM e memria flash/ROM. O acesso ao cdigo sempre
feito em endereos pares. Os dados podem ser acessados como Byte (8 bits) ou Word (16 bits)
(MSP430 Users guide, 2006).
2.5.3 Conversor analgico / digital ADC10
O mdulo ADC10 constitudo por um conversor analgico / digital de 10 bits, gerador
de referncia de 1,5V ou 2,5V, e 16 registradores que armazenam at dezesseis amostras
independentes, sem a necessidade de interveno da CPU. Outras caractersticas deste mdulo
so (MSP430 Users guide, 2006):
Converso iniciada via software;
Sample-and-hold com tempo de amostragem varivel;
Quatro modos de converso: somente um canal, um canal repetidas vezes, seqncia
de canais e seqncia repetida de canais;
16 registradores para armazenamento dos resultados das converses;
Registrador de vetor de interrupo: este registrador permite identificar qual canal
gerou a interrupo no ADC10. O conversor analgico digital converte a entrada
analgica em uma representao digital de 10 bits e armazena o resultado na memria
de converso. Utiliza tambm, dois nveis de tenso (V
R+
e V
R-
) para definir o limite
superior e inferior do intervalo de converso. Tais limites so configurados via
software. A sada digital ser 0x3FF quando a entrada analgica for igual ao limite
superior (V
R+
), e zero quando for igual ao limite inferior (V
R-
). Cada um dos dezesseis
registradores, chamados conversion-memory, utilizado para o armazenamento de
51
amostras, possuindo uma memria de controle associada. Desta forma possvel
definir os limites de tenso e o canal de entrada a ser utilizado. O conversor
configurado atravs de dois registradores de controle ADC10CTL0 e ADC10CTL1;
O sinal ADC10CLK pode ser utilizado como clock de converso. Para sincronizao
de freqncia de amostragem, possvel utilizar um sinal com perodo mltiplo do
perodo de converso, ou um sinal gerado pelos timers internos do MSP430F1122;
Oito canais individualmente configurveis;
Permite, via software, a escolha da fonte do sinal de clock;
Taxa de converso de at duzentas mil amostras por segundo;
Conversor de 10 bits sem perda de cdigos;
O nmero de ciclos do sinal de clock do ADC10 que ser utilizado na amostragem
definido pelo controle SHTx.
16 registradores que armazenam o resultado das converses. Cada registrador pode ser
configurado para receber dados dos oito canais de entrada e com referncia de tenso
desejada. Tais registradores so denominados ADC10MEMx e apresentados na Figura
2.18 a seguir (MSP430 Users guide, 2006).
Figura 2.18: AC10MEM Registrador de sada do conversor AD.
Fonte: MSP430 datasheet.
52
As fontes de clock de amostragem para o conversor analgico digital so o ADC10SC
e os sinais gerados pela sada dos timers A1, B0 e B1.
Os registradores de memria so de 16 bits, porm as amostras geradas pelo conversor
AD possuem resoluo de apenas 10 bits, pois os seis bits mais significativos de cada
registrador possuem valor zero (MSP430 Users Guide, 2006).
A cada memria de converso est associado um registrador de configurao,
denominado ADC10MCTLx, onde x assume valores inteiros de zero a quinze. Nos
registradores ADC10CTL0 e ADC10CTL1 so definidos o canal de entrada e a referncia
utilizada pelo ADC10MEMx. A Figura 2.19 a seguir mostra a estrutura dos registradores de
controle e a funo de seus bits (MSP430 Users Guide, 2006).
Figura 2.19: Arquitetura interna MSP430x1x2x .
Fonte: MSP430 datasheet
53
2.5.4 Timers
O microcontrolador MSP430F1122 possui internamente contadores de eventos
sincronizados, chamados de temporizadores. Os temporizadores so encarregados de
quantificar o tempo entre eventos.
2.5.4.1 Principais caractersticas dos temporizadores
Os timers A e B so contadores/temporizadores com as seguintes caractersticas:
16 bits (mximo);
Fontes (internas e externas) de clock selecionvel e configurvel;
Pr-escalonamento da entrada do clock. O clock principal MCLK pode ser selecionado
a partir de trs fontes diferentes: o oscilador LFXT1 (cristal de baixa freqncia), o
oscilador XT2 (cristal de alta freqncia) e o DCO. A seleo de uma dessas fontes
feita pelos bits SELM, localizados no registrador BSCCTL2. O sinal proveniente de
uma dessas fontes pode ainda ser dividido por um fator de 1, 2, 4, ou 8, conforme os
bits DIVM, localizados no mesmo registrador;
Registros configurveis para captura ou comparao a partir da sada do comparador
analgico;
Sadas configurveis, capazes de operar no modo de captura, medindo o perodo de
sinais, comparao, gerao de pulsos de largura programvel (PWM) ou gerao de
sinais com freqncia e ciclo ativo programvel;
54
Registro do vetor de interrupes para decodificao rpida de todos os
temporizadores (MSP430 Users guide, 1996).
2.6 ENLACE POR RDIO FREQNCIA
2.6.1 Circuito Integrado nRF2401
O mdulo de rdio freqncia (RF) escolhido para o enlace do TPMS aqui
desenvolvido um transmissor/receptor de rdio, o transceiver NRF2401 fabricado pela
empresa NORDIC VLSI ASA, o qual opera na faixa de freqncias de 2,4 a 2,5 GHz, banda
ISM.
Uma importante caracterstica deste transceiver a taxa de transmisso/recepo
configurvel de 200 kbps a 1 Mbps. No chip do NRF2401 esto integrados um sintetizador de
freqncias, um amplificador, um oscilador e um modulador.
A modulao utilizada pelo mdulo de RF do tipo GFSK (Gaussian Frequency Shift
Keying). A modulao GFSK similar tcnica FSK (Frequency Shift Keying). A diferena
consiste na utilizao de pulsos gaussianos para obteno de uma melhor eficincia espectral.
A propsito, as modulaes GFSK so utilizadas nos sistemas Bluetooth. Na tcnica
GFSK, os dados so codificados na forma de variaes de freqncia em uma portadora, de
maneira similar modulao FSK. Assim, o modulador utilizado pode ser o mesmo que para
a modulao FSK. Todavia, antes dos pulsos entrarem no modulador, eles passam por um
filtro gaussiano, de modo a reduzir a largura espectral dos mesmos. Este filtro gaussiano
55
suaviza a transio entre os valores dos pulsos. A figura 2.20 ilustra a transformao dos
pulsos aps passagem pelo filtro.
Figura 2.20: Transformao dos pulsos pelo filtro gaussiano.
2.6.1.1 Espalhamento espectral
A modulao GFSK utiliza o princpio de espalhamento espectral, isto , o aumento da
quantidade de bits utilizados para transmitir uma mesma informao, de modo a espalhar o
espectro de freqncias do sinal. Desta forma, a banda de freqncias na qual o sinal
transmitido aumentada. Normalmente, utiliza-se um cdigo de espalhamento que
multiplicado pelos bits de informao. Os cdigos de espalhamento so muito usados em
transmisses digitais, principalmente em WLAN, uma vez que o espalhamento do sinal em
freqncias proporciona uma srie de vantagens que melhoram consideravelmente o
desempenho de transmisso, tais como imunidade a rudos e interferncias; imunidade a
distores devido a multi percursos; e, compartilhamento da mesma banda de freqncias,
com baixa interferncia, por diversos usurios.
56
2.6.1.2 Caractersticas do transceiver nRF2401
Alm de atender aos requisitos de tamanho reduzido e taxa de transmisso de dados
elevada, outra grande vantagem do transceiver nRF2401 seu baixo consumo de energia
(portanto, ideal para aplicaes alimentadas com baterias), o que o torna adequado para a
utilizao com o microcontrolador MSP430F1122. Por exemplo, a corrente consumida no
modo de transmisso, com operao na mxima potncia de sada, de 13 mA. J no modo de
recepo, a corrente consumida de 18mA.
Dentre as caractersticas do transceiver nRF2401, destacam-se:
Pequeno encapsulamento contendo 24 pinos (QFN24 5x5mm);
Necessidade de poucos componentes externos;
Operao multi-canal;
Tempo de troca de canal inferior a 200us;
Ideal para aplicaes com baixo consumo de energia (alimentao de 1,9 a 3,6 V);
Clculo automtico dos bits de ADDRESS (alocao num endereo do pacote de
dados) e CRC (Cyclic Redundance Check, que computado pelo nRF2401, este
campo conferido na recepo para validao do pacote de dados);
Mdulo ShockBurst (utilizado neste projeto), sendo ideal para aplicaes com baixo
consumo de energia. Assim, exige-se menos corrente da bateria. As vantagens
oferecidas por este modo, alm da alta reduo do consumo de corrente, so: menor
custo do sistema, e reduo considervel do risco de colises (no ar) durante o tempo
de transmisses;
Dispensa filtros tipo surface acoustic wave (SAW) externos;
57
A potncia de sada e as freqncias dos canais so programveis atravs de uma
interface serial.
O transceiver nRF2401 possui ainda um recurso chamado DuCeiver, o qual habilita a
recepo simultnea de dois canais com freqncias distintas operando na mxima taxa de
transmisso. O diagrama de blocos do transceiver nRF2401 apresentado na Figura 2.21.
Figura 2.21: Diagrama de blocos do transceiver nRF2401.
Fonte: (Datasheet nRF2401)
O transceiver nRF2401, conforme j mencionado quando da apresentao de suas
caractersticas, possui 24 pinos e 5 mm de largura e comprimento. A disposio dos pinos e a
funo deles so apresentadas na Figura 2.22 e na Tabela 2.2, respectivamente:
Figura 2.22: Disposio dos pinos do transceiver nRF2401.
Fonte: (Datasheet nRF2401)
58
Tabela 2.2: Descrio das funes dos pinos do transceiver nRF2401.
Fonte: (Datasheet nRF2401)
2.6.1.3 Transmisso de dados
A transmisso de dados pelo mdulo de RF realizada por meio do modelo de pacote
de dados gerado pelo nRF2401 e apresentado na Figura 2.23.
Figura 2.23: Formato do pacote gerado pelo nRF2401.
Fonte: (Datasheet nRF2401)
Os campos so assim definidos:
59
PREAMBLE este campo (designado para inicializao da transmisso de dados)
possui um tamanho de 8 bits, sendo adicionado ao pacote de dados para proporcionar maior
espao para o payload (informao, propriamente dita). No modo de recepo (RX), os 8 bits
so removidos da informao, antes do envio dos mesmos ao microcontrolador. Sua funo
proporcionar estabilidade ao receptor do mdulo de RF;
ADDRESS este campo do pacote usado pelo receptor para identificao do pacote.
Este endereo pode alocar um sistema ou uma unidade em particular. Seu comprimento varia
de 8 a 40 bits. Estes dados so automaticamente removidos na recepo de um pacote no
modo ShockBurst. Para a transmisso, o microcontrolador deve enviar os bits de address ao
nRF2401. Em geral, quanto mais bits de address, menor a chance de uma falsa deteco por
parte do receptor;
PAYLOAD so os dados, propriamente ditos, a serem transmitidos. Seu tamanho
equivale a 256 bits menos os bits de address e de CRC:
CRC o campo CRC (Cyclic Redundance Check) computado automaticamente pelo
nRF2401 atravs dos bytes de preamble e address. Esse campo conferido na recepo para a
validao do pacote.
60
2.6.1.4 Modos de operao do nRF2401
2.6.1.4.1 Transmisso ShockBurst
TM
modo ativo
O nRF2401 possui dois tipos de modos ativos para transmisso: o modo direto e o
modo ShockBurst. O modo usado no mdulo de RF da rede aqui implementada do tipo
ShockBurst (modo de baixo consumo de energia).
O modo ShockBurst utiliza a tcnica FIFO (First Input, First Output) para
armazenar temporariamente no mdulo de RF os dados enviados pelo microcontrolador. Os
dados so transferidos do microcontrolador atravs de uma interface SPI (Serial Peripheral
Interface). Este tipo de interface utilizado para comunicao dos conversores AD, sendo a
taxa de transmisso controlada pelo prprio microcontrolador. Aps o armazenamento FIFO,
os dados so transmitidos pelo enlace RF a uma taxa de 1Mbps. A operao no modo
ShockBurst d acesso alta taxa de transmisso oferecida pela faixa de 2,4 GHz sem a
necessidade de um microcontrolador veloz para o processamento de dados. Portanto, h uma
reduo considervel no consumo de corrente ao se permitir que a parte digital da aplicao
seja executada numa baixa velocidade, enquanto a taxa de transmisso do enlace RF
maximizada. O diagrama da Figura 2.24 ilustra o funcionamento do nRF2401 no modo
ShockBurst. Neste caso, o microcontrolador se comunica com o nRF2401 a uma taxa
constante de 10 kbps.
Figura 2.24: Diagrama ilustrando a transmisso do nRF2401 em modo ShockBurst
TM
.
Fonte: (Datasheet nRF2401).
61
A interface do microcontrolador com o mdulo de RF para o envio de dados feita
por meio dos pinos CE, CLK1, DATA e DR. Quando o microcontrolador est pronto para o
envio de dados ao mdulo de RF, o pino CE deve ser posto em nvel lgico alto. Os dados
(payload + address) so enviados pelo pino DATA a uma taxa controlada pelo pino CLK1.
Esta operao tambm realizada pelo protocolo presente no firmware do microcontrolador
MSP430F149. O mdulo de RF calcula automaticamente os bits de CRC a serem inseridos no
pacote. O pino CE deve ser ento colocado em nvel baixo para ativar a transmisso no modo
ShockBurst, conforme o fluxograma apresentado na Figura 2.25. Aps o envio do pacote de
dados, o nRF2401 retorna finalmente ao modo stand-by.
Figura 2.25: Fluxograma de transmisso do nRF2401 em modo ShockBurst
TM
.
Fonte: (Datasheet nRF2401).
62
2.6.1.4.2 Recepo ShockBurst
TM
modo ativo
Na recepo ShockBurst modo ativo, o mdulo de RF funciona de forma
semelhante. Para ativar a recepo, o pino CE deve ser posto em nvel alto. Decorridos ento
200 s, o mdulo de RF comea a monitorao de busca de sinais. Quando um pacote
recebido, o nRF2401 faz a verificao dos bits de ADDRESS e CRC. Caso o pacote seja
considerado vlido (ADDRESS e CRC corretos), os bits de PREAMBLE, ADDRESS E CRC
so removidos e o microcontrolador notificado sobre a presena dos dados atravs do pino
DR (Data Ready) em nvel lgico alto. O microcontrolador ento recebe os dados atravs do
pino DATA da interface SPI na taxa programada. O fluxograma ilustrando esta operao
apresentado na Figura 2.26.
Figura 2.26: Fluxograma de recepo do nRF2401 em modo ShockBurst
TM
.
Fonte: (Datasheet nRF2401).
63
2.6.1.4.3 Modo power down
No modo power down, o nRF2401 desabilitado e o consumo de corrente se torna
mnimo (normalmente menor do que 1 A). Para seleo do modo power down, o pino
PWR_UP deve ser posto em nvel baixo.
2.6.1.4.4 Modo de habilitao
O nRF2401 habilitado quando o bit CS colocado em nvel lgico alto. O nRF2401
estar ento apto para fazer o download da palavra de configurao que ser fornecida pelo
microcontrolador e orientar o funcionamento do mdulo de RF.
2.6.1.5 Antena de transmisso ou recepo
A antena parte de um sistema de recepo e/ou transmisso que projetada para
irradiar ou receber ondas eletromagnticas. Sendo um componente essencial de qualquer
sistema de transmisso de rdio, possui caractersticas direcionais, isto , uma densidade de
potncia eletromagntica irradiada com certa intensidade ao redor da antena. A informao
pode, ento, ser transmitida entre diferentes lugares sem a necessidade da interveno de
outras estruturas.
Com respeito ao enlace do TPMS, a antena do mdulo TRW-24G implementada neste
trabalho do tipo dipolo. Sendo um dos aspectos importantes referentes terminologia e
propriedades deste dispositivo. Esta antena comumente utilizada em comunicaes mveis,
permitindo um padro unidirecional no plano horizontal. A antena parte integrante do
64
mdulo TRW-24G, fabricado pela empresa Whensing, este mdulo produto de mercado
cujo principal componente o circuito integrado nRF2401 e adicionados os componentes
necessrios para seu funcionamento bem como a antena. O digrama eltrico mostrado na
Figura 2.27. Os pinos de sada do nRF2401, designados por ANT1 e ANT2, permitem uma
sada balanceada de RF para a antena. Entre tais pinos e a alimentao do monopolo
utilizada uma configurao diferencial de casamento de sada nica que alimenta a antena
posicionada no terminal RF. A configurao utilizada foi sugerida pelo Datasheet do
nRF2401, que seguramente foi seguida pela Whensing no momento do projeto do TRW-24G.
Figura 2.27: Esquema eltrico sugerido para o nRF2401.
Fonte: (Datasheet nRF2401).
65
2.6.1.6 Mdulo TRW-24G Whensing
O mdulo TRW-24G, apresentado na Figura 2.28, possui as caractersticas bsicas e
desempenho do nRF2401, sendo fabricado pela empresa Whensing, sendo um item de grande
praticidade quanto aplicao, pois a Whensing implementa o nRF2401 e todos os
componentes necessrios para o funcionamento em um pequeno mdulo, neste podemos
observar a antena e um circuito com proteo de blindagem para interferncias. Dentro desta
blindagem encontra-se o nRF2401 e os resistores e capacitores descritos na Figura 2.27.
Figura 2.28: Mdulo TRW-24G.
Fonte: (TRW-24G Datasheet)
66
2.7 SENSOR DE PRESSO M50-100A
O Sensor de Presso ICS-M50-100A um sensor de silcio piezo resistivo, fabricado
pela empresa Measurement Specialties, est encapsulado em um formato para montagem de
superfcie, conforme Figura 2.29. Pode medir a presso absoluta e, presso relativa
desconsiderando a presso atmosfrica via hardware ou software. O chip sensor est montado
sobre um substrato de cermica e possui algumas caractersticas relevantes (Product
Description m50, 2005):
Sada diferencial de 0 a 60mV ;
Baixo consumo na excitao em 3,3Vcc com 1mA;
Trs opes de conexo de entrada para presso;
Figura 2.29: Sensor ICS-M50 .
Fonte: (Product Description m50, 2005):
67
A alimentao mnima para o funcionamento de 3Vcc e sua estrutura interna em
forma de ponte de Wheatstone. Fisicamente seu pequeno tamanho favorece diversas
aplicaes como medio de altitude, medio de presso atmosfrica, medio de presso de
pneus e algumas aplicaes em instrumentao mdica (Product Description m50, 2005):.
Suas dimenses so apresentadas na Figura 2.30:
Figura 2.30: Dimenses do Sensor ICS-M50.
Fonte: (Product Description m50, 2005).
2.8 AMPLIFICADOR OPERACIONAL MC34072
Os amplificadores operacionais so dispositivos extremamente versteis com uma
imensa gama de aplicaes em toda a Eletrnica.
Os amplificadores operacionais so amplificadores de acoplamento direto, de alto
ganho, que usam realimentao para controle de suas caractersticas. Eles so hoje encarados
como um componente fundamental na construo de circuitos analgicos. Internamente, so
constitudos de circuitos transistorizados. Externamente, so geralmente representados pelo
smbolo apresentado na Figura 2.31 em que convencionalmente s entradas e sadas aparecem
68
e no as conexes das fontes de alimentao. Os amplificadores operacionais so usados em
amplificao, controle, gerao de formas de onda senoidal ou no, em freqncias desde
C.C. at vrios Megahertz. Com emprego na realizao das funes clssicas matemticas
como adio, subtrao, multiplicao, diviso, integrao e diferenciao, os amplificadores
operacionais so os elementos bsicos dos computadores analgicos. So teis ainda em
inmeras aplicaes em instrumentao, sistemas de controle, sistemas de regulao de tenso
e corrente, processamento de sinais, etc. (Handbook of Operational Amplifier Circuit Design,
1976).
Figura 2.31: Smbolo de um amplificador operacional.
Fonte: (Handbook of Operational Amplifier Circuit Design, 1976).
Como o sinal de 0 a 60mV poderia ser interpretado de forma incorreta pelo
conversor AD do microcontrolador MSP430, se faz necessrio uma amplificao do sinal de
aproximadamente trinta vezes, com tal necessidade foi utilizado um circuito integrado,
fabricado pela empresa Motorola, modelo MC34072 com encapsulamento SOIC8 com dois
amplificadores, conforme Figura 2.32.
Figura 2.32: Encapsulamento e descrio de pinos do MC34072 .
Fonte: (MC34072 - Datasheet):
69
Com base nos dados coletados a partir das informaes do datasheet, quando o
MC34072 alimentado por fonte simples de 3,3Vcc e estiver em alguma configurao de
operao linear algumas particularidades so observadas:
Tenso mnima de sada igual a 0,165V;
Tenso mxima de sada igual Vcc 0,65V;
Circuito com sada linear dentro destes limites acima mencionados.
Isto porque o MC34072 no do tipo rail to rail.
2.8.1 Configurao bsica inversora
Os amplificadores operacionais apresentam, geralmente, circuitos de entrada em
configurao diferencial. A Figura 2.31 mostra a entrada inversora () e a no inversora (+),
as tenses de entrada
1
,
2
e a tenso de sada
S
. A tenso de sada, por causa do circuito
diferencial , portanto, independente das tenses
1
e
2
, dependendo sim, de sua diferena,
(
2
1
). Admitindo um amplificador operacional alimentado com + Vcc, sua tenso de
sada ser sempre menor que a tenso de alimentao, valores em que ocorrem as saturaes.
A Figura 2.33 demonstra a configurao bsica inversora (Handbook of Operational
Amplifier Circuit Design, 1976).
70
Figura 2.33: Configurao bsica inversora de amplificador operacional.
Fonte: (Handbook of Operational Amplifier Circuit Design, 1976):
2.8.2 Configurao bsica no inversora
O sinal a ser processado no TPMS aplicado na entrada no-inversora e o sinal de
sada realimentado na entrada inversora. A Figura 2.34 mostra a configurao bsica no
inversora (Handbook of Operational Amplifier Circuit Design, 1976).
Figura 2.34: Configurao bsica no inversora de amplificador operacional.
Fonte: (Handbook of Operational Amplifier Circuit Design, 1976)
71
3 MTODOS E MATERIAIS UTILIZADOS
3.1 INTRODUO
O desenvolvimento do Projeto foi divido em sete partes. Na Seo 3.2 e 3.3 so
apresentados os recursos de software e instrumentos. Na Seo 3.4 apresentado o
desenvolvimento para especificao dos componentes. Na Seo 3.5 apresentado o mtodo
de elaborao das placas de circuito impresso utilizadas nos prottipos deste projeto. Na
Seo 3.6 exposta a lgica de funcionamento e a programao do microcontrolador. Na
Seo 3.7 h uma demonstrao da estrutura mecnica e de fixao de todos os itens
envolvidos no projeto. Posteriormente na Seo 3.8 exposto o software utilizado na
recepo dos dados no computador pessoal. E por final na Seo 3.9 demonstrado o
instrumento que foi utilizado como padro para comparao dos resultados das medies.
3.2 RECURSOS COMPUTACIONAIS
Durante a elaborao do projeto utilizou-se de um computador pessoal simples, neste
caso um notebook Pcchips A900 com recursos bsicos e processador com clock de 800MHz /
72
512MB de memria RAM, com disponibilidade de interfaces serial e paralela. Onde foram
instalados os softwares IAR Embedded Workbench Kick Start V3.42A e o Visual Basic .Net.
A interface paralela para comunicao essencial para o desenvolvimento do
software do microcontrolador, e por ela que o programa pode ser executado passo a passo e
gravado no MSP 430. A interface serial necessria para a recepo dos dados atravs do Kit
educacional Nordic nRF2401 EVBOARD + nRF configuration board.
3.2.1 Softwares utilizados
Para a realizao deste projeto utilizou-se de diversos softwares computacionais para
o desenvolvimento de firmware do processador, placa de circuito impresso, elaborao de
bloco diagramas e outros recursos ilustrativos do projeto, todos os softwares mencionados
trabalham em sistema operacional Microsoft Windows XP, exceto quando especificado,
necessitam de recursos de hardware de um computador pessoal de uso domstico, tal como
interface serial, paralela e USB.
Para a elaborao do programa do microcontrolador, o firmware, em linguagem C,
foi utilizado o compilador IAR Embedded Workbench Kick Start V3.42A, este software em
verso de demonstrao limitado em 2kbytes, contudo a aplicao em questo no atingir
este limite do software e sendo assim foi possvel a sua utilizao de forma plena, sem
esquecer do recurso de debug on-chip, este ajuda a encontrar e solucionar problemas
executando o programa passo a passo a partir do chip, atravs da porta paralela.
73
Para a simulao e validao dos circuitos utilizou-se o Electronics Workbench e, ou
Multisim disponveis nos Laboratrios do Centro Universitrio Feevale.
As placas de circuito impresso necessrias para a concluso e validao do projeto
foram elaboradas no software TANGO
para DOS.
A gravao do firmware no microcontrolador MSP430 feita atravs do software
Free MSP430 Programming Utility V1.6.
Na elaborao do software tpms.exe, utilizado na recepo do valor da presso em
qualquer computador pessoal, utilizou-se o software Visual Basic dotNet, este compilador
necessita da instalao de um pacote contendo todos os arquivos DLL para a execuo plena
dos softwares compilados por ele. Este pacote gratuito e pode ser encontrado como DotNet
Frame Work, instalando a verso 1.1 ou mais recente.
3.3 RECURSOS INSTRUMENTAIS
3.3.1 Instrumentos utilizados
Para validao parcial dos circuitos eletrnicos do Projeto foram utilizados diversos
instrumentos disponveis nos Laboratrios de Eletrnica Digital, Eletrnica Analgica e
Laboratrio de Telecomunicaes no Centro Universitrio Feevale, descritos a seguir:
74
Osciloscpio digital Agilent 54622D;
Figura 3.1: Osciloscpio Digital Agilent 54622D
Fonte: (datasheet Agilent 54622D).
Osciloscpio analgico Hameg Instruments HM303-6;
Figura 3.2: Osciloscpio Analgico Hameg Instruments HM303-6
Fonte: (datasheet Hameg HM-303-6)
75
Analisador de Espectro Rohde & Schwartz FS300;
Figura 3.3: Analisador de espectro Rohde & Schwartz FS300.
Fonte: (datasheet - Rohde & Schwartz FS300).
3.4 DIMENSIONAMENTO DOS COMPONENTES UTILIZADOS
3.4.1 Dimensionamento das bobinas
Para o clculo das bobinas, baseado no princpio da indutncia mtua e a da induo
eletromagntica, o procedimento utilizado foi um clculo bsico relacionando a resistividade
do fio obtida na tabela de fios AWG, apresentado na Tabela 3.1, onde na bobina primria
necessria uma corrente de aproximadamente 0,2A, garantido que o fluxo magntico seja
elevado e o nmero de espiras ir garantir que o nvel de campo eletromagntico sobre a
bobina secundria seja o mnimo para a gerao de 6V de tenso induzida, com a freqncia
de 2KHz gerada por um oscilador que ser apresentado no prximo item.
76
Tabela 3.1: Tabela de equivalncia de fios AWG.
Fonte: Site: (http://www.egeneral.com.br/TabelaAWG.htm)
FIOS E CABOS PADRO AWG / MCM
Bitola
Dimetro
aproximado
[mm]
Seo
aproximada
[mm]
Resistncia
aproximada
1
[ohm/m]
Corrente mxima
2
[A]
40 AWG 0,08 0,005 3,4 -
39 AWG 0,09 0,006 2,7 -
38 AWG 0,10 0,008 2,2 -
37 AWG 0,11 0,010 1,7 -
36 AWG 0,13 0,013 1,4 -
35 AWG 0,14 0,016 1,1 1
34 AWG 0,16 0,020 0,86 -
33 AWG 0,18 0,025 0,68 -
32 AWG 0,20 0,032 0,54 -
31 AWG 0,23 0,040 0,43 -
30 AWG 0,26 0,051 0,34 2
29 AWG 0,29 0,064 0,27 -
28 AWG 0,32 0,081 0,21 -
27 AWG 0,36 0,10 0,17 -
26 AWG 0,41 0,13 0,13 -
25 AWG 0,46 0,16 0,11 -
24 AWG 0,51 0,21 0,084 4
23 AWG 0,57 0,26 0,067 -
22 AWG 0,64 0,33 0,053 6
21 AWG 0,72 0,41 0,042 -
20 AWG 0,81 0,52 0,033 9
19 AWG 0,91 0,65 0,026 -
18 AWG 1,0 0,82 0,021 11
17 AWG 1,2 1,0 0,017 -
16 AWG 1,3 1,3 0,013 13
15 AWG 1,5 1,7 0,010 -
14 AWG 1,6 2,1 0,0083 16
13 AWG 1,8 2,6 0,0066 -
12 AWG 2,0 3,3 0,0052 22
11 AWG 2,3 4,2 0,0041 -
10 AWG 2,6 5,3 0,0033 35
9 AWG 2,9 6,6 0,0026 -
8 AWG 3,3 8,4 0,0021 50
7 AWG 3,7 10 0,0016 -
6 AWG 4,1 13 0,0013 62
5 AWG 4,6 17 0,0010 -
4 AWG 5,2 21 0,00082 70
3 AWG 5,8 27 0,00065 -
2 AWG 6,5 34 0,00051 90
1 AWG 7,4 42 0,00041 110
77
A bobina primria foi construda sobre um carretel de nylon torneado com ncleo de
Ferrite de 10mm de dimetro, onde especificou-se uma corrente de 0,2A com freqncia de
2KHz. De acordo com a tabela AWG foi escolhido o fio 20AWG, este que possui capacidade
mxima de 9A e sua resistividade mdia por metro de 0,03, considerando o modelo de
corrente contnua, em um primeiro momento apenas a resistividade do fio utilizada,
observando detalhes como o dimetro mdio da espira sendo 23mm, o comprimento mdio de
72mm de fio por espira e a largura til do carretel como 60mm, e a resistividade mdia
medida com miliohmmmetro de uma amostra do fio a ser utilizado foi de 0,166. Sendo
assim, utilizando o princpio da lei de Ohm, ser obtido o nmero de espiras da bobina
primria:
I
V
R I R V = = . mm R
MDIO
23 6 = =
(3.1)
m espira da mdio permetro
m fio do ade resistivid
bobina na desejada a resistnci
n
_ _ _
/ _ _
_ _ _
=
m
m
n
072 , 0
/ 166 , 0
6
=
(3.2)
O nmero de aproximadamente 500 espiras est coerente, pois com a alimentao de
12V em corrente contnua obtive uma medio com corrente de 1,94A. A bobina primria
apresentada na Figura 3.4.
78
Figura 3.4: Bobina primria.
O nmero de espiras da bobina secundria, foi determinado utilizando a teoria da
indutncia mtua, como resultado obtm-se uma relao de 15000 espiras de fio 44AWG, o
que impraticvel pois a resistncia do enrolamento seria muito alta, algo como 5/m, o que
impossibilitaria a circulao de corrente suficiente para a alimentao do circuito e
carregamento da bateria, este valor foi obtido atravs de frmulas e tabelas que consideram
um modelo ideal onde algumas perdas so desconsideradas e desta forma no se aplica como
soluo deste clculo.
Desta forma, mudou-se a abordagem e construiu-se uma bobina com fio 30AWG,
garantindo, via tabela de fios AWG, uma resistividade de 0,34/m, com aproximadamente
1000 espiras, como teste, as bobinas primria e secundria ficaram distantes
aproximadamente 50mm e com ncleos concntricos, a tenso induzida na bobina secundria
foi de 4,3V, sendo que o projeto necessita um valor superior a 6V, incrementou-se o nmero
de espiras a fim de atingir o valor mnimo de tenso especificado e com capacidade de
corrente suficiente ao funcionamento do circuito e carga da bateria utilizada. A bobina
secundria apresentada na Figura 3.5.
79
Figura 3.5: Bobina secundria
3.4.2 Projeto do oscilador
Para melhor eficincia e menor aquecimento bobina primria foi necessrio o
projeto de um oscilador de 20KHz, com duty cycle de aproximadamente cinqenta por cento
com uma etapa de sada com capacidade para o acionamento da bobina primria. O oscilador
foi implementado com o circuito integrado LM555, cujo esquema eltrico mostrado na
Figura 3.6
Figura 3.6: Esquema eltrico do oscilador.
80
Para o acionamento da bobina primria, foi utilizando um driver de sada com uma
configurao de transistores MOSFET, de modo que a queda de tenso sobre o transistor seja
a mnima possvel e conseqentemente seu aquecimento seja baixo requerendo um pequeno
dissipador de calor.
3.4.3 Circuito de recarga da bateria
No programa implementado no microcontrolador MSP430 existe uma sub-rotina que
verifica a tenso da bateria, se caso o valor da bateria estiver menor que 3,1V essa sub-rotina
ativa a carga, mas isso, s se estiver recebendo tenso induzida devido aos efeitos externos.
Se a bateria tiver tenso maior ou igual a 3,9V, ou seja, quando estiver completamente
carregada, a recarga interrompida, mesmo se o circuito ainda estiver recebendo tenso
induzida. Na Figura 3.7 apresentado o circuito de recarga sendo o transistor MOSFET Q2, o
responsvel por interromper a recarga quando necessrio, garantindo um potencial de
aproximadamente 0V na base do transistor Q1.
Figura 3.7: Esquema eltrico do circuito de recarga da bateria.
81
3.4.4 Amplificao do sinal enviado pelo sensor de presso
De acordo com o manual do fabricante Measurement Specialties, no Anexo A, o
sensor de presso ICS-M50 tipo strain-gauge tem uma sada tpica linear de 0 a 60mV,
proporcional a variao de presso de 0 a 100PSIa. Este de baixa amplitude sendo
necessrio amplificar de modo que o conversor AD do microcontrolador interprete o sinal
com uma melhor resoluo. O circuito da Figura 3.8, composto por um amplificador
operacional duplo alimentado em 3,3V tem sua sada V
O
deduzida a partir da definio das
correntes e tenses do circuito.
Figura 3.8: Esquema eltrico do amplificador do sinal enviado pelo sensor ICS-M50.
A partir das correntes e tenses indicadas na Figura 3.8, primeiramente foram obtidas
as equaes das duas malhas principais do circuito:
82
R
V V
I
REF 5
1
=
R
V Vo
I
3 1
4
=
(3.3)
R
Vo V
I
1 5
2
=
R
Vo V
I
=
3
5
(3.4)
4
3 5
3
R
V V
I
=
5 3
V V V
IN
= (3.5)
0
4 5 3
= + I I I 0
3 2 1
= I I I (3.6)
0
3 1 3
4
3 5
=
R
V Vo
R
Vo V
R
V V
(3.7)
0
4
3 5 1 5 5
=
R
V V
R
Vo V
R
V V
REF
(3.8)
Com as Equaes 3.7 e 3.8 definidas, reordenando os termos, substituindo as
variveis, temos uma funo de ganho definida como:
83
=
=
=
680
10
2 , 1
4
R
K R
V V
REF
REF IN
V V
R
R
Vo +
+ =
4
1 2
(3.9)
Assim a relao de ganho obtida atravs deste equacionamento terico, porm
devido a alimentao estar prxima do limite mnimo da alimentao do circuito integrado, o
sinal obtido na sada recebe uma ligeira atenuao, mas mesmo assim o circuito de medio
considerado linear, salvo pequenas variaes da tenso de sada devido aos sinais de entrada
terem valores na ordem de milivolts. A linearidade da resposta do circuito de medio
comprovada com os dados da Tabela 3.2 e visualmente atravs do Grfico 3.1 cujos dados
obtidos atravs de medies prticas injetando um valor de presso padronizado e registrando
seus valores de tenso na entrada do canal do conversor analgico digital do
microcontrolador.
Tabela 3.2: Comportamento do circuito amplificador do sinal do sensor ICS-M50.
Presso
Absoluta (PSI)
Tenso na entrada
do AD (V)
0 1,099
7,3 1,207
14,7 1,352
19,7 1,466
24,7 1,568
29,7 1,676
34,7 1,784
39,7 1,8914
84
Presso X Vo
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 7,3 14,7 19,7 24,7 29,7 34,7 39,7
PSIg
V
Grfico 3.1: Linearidade do sinal de sada do amplificador diferencial.
3.5 ELABORAO DAS PLACAS DE CIRCUITO IMPRESSO
O layout do circuito impresso foi elaborado no software Tango
para DOS, seguindo
os esquemas apresentados nas Sees 3.4.2, 3.4.3 e 3.4.5. Os componentes foram
posicionados de acordo com as limitaes de espao, empregando o uso de alguns resistores e
capacitores em SMD, mas montados de maneira artesanal.
Uma vez que a elaborao do circuito impresso em software estava concluda, a
transferncia do layout para a placa virgem de cobre foi realizada pelo processo de
transferncia trmica, este que atravs de uma impressora laser, com tonner de qualidade,
realizou-se a impresso em papel couch, gramatura 120 com brilho. Logo aps, com o
auxlio de um ferro de passar roupa convencional, executou-se a transferncia trmica da
impresso para a placa de fibra de vidro face simples previamente limpa com palha de ao,
livre de gordura ou qualquer outro tipo de sujeira. A temperatura do termostato dever estar
85
no mximo, e se deve aplicar fora ao papel de modo que todas as trilhas sejam transferidas
garantindo que no haja pontos falhos.
Sem retirar ou descolar o papel da placa, aguarda-se a temperatura da placa baixar,
logo aps submerge-se a placa em gua e aplicando leve presso desmancha-se o papel,
restando apenas o cobre com a impresso, verifica-se se no existem falhas e se tudo estiver
perfeito a placa est pronta para o processo de corroso.
A corroso realizada com percloreto de ferro, da maneira convencional,
mergulhando a placa na soluo e aguardando a corroso que normalmente ocorre em um
tempo mdio de vinte a trinta minutos. Aps este processo a placa deve ser lavada com palha
de ao para remover a camada de tonner que protegeu a trilhas contra a ao corrosiva da
soluo.
Com a placa limpa, a furao deve ser efetuada, se existir a necessidade o processo
de transferncia pode ser utilizado para imprimir a mscara de componentes na placa.
Para a placa do sensor ICS-M50 o fotolito da placa est apresentado na Figura 3.9, o
fotolito da placa principal e do adaptador DIP20 para SOIC20 est apresentado na Figura 3.10
e por fim o fotolito da placa do oscilador primrio est apresentado na Figura 3.11, todos os
fotolitos so compostos por trs itens fundamentais:
Mscara das trilhas;
Mscara de componentes;
Mscara de furao.
86
Figura 3.9: Fotolito da placa do sensor ICS-M50.
Figura 3.10: Fotolito da placa principal e adaptador.
87
Figura 3.11: Fotolito da placa do Oscilador Primrio.
3.6 PROGRAMAO DO MICROCONTROLADOR
A programao em Linguagem C, agregada aos recursos assistentes do compilador
torna a tarefa de programar o processador uma tarefa relativamente simples. O programa foi
desenvolvido para atuar nos pinos conforme a Figura 3.12, o cdigo fonte do programa est
apresentado e comentado no Apndice II.
Figura 3.12: Diagrama das conexes bsicas para interfacear com o microcontrolador.
88
De forma ilustrativa, o fluxograma do programa apresentado na Figura 3.13, onde
os seus pontos chaves so:
Entrada do modo de baixo consumo;
Transmisso dos valores amostrados;
Verificao e, se necessrio, a ativao da recarga da bateria;
Deteco da existncia de tenso induzida e sada do modo de baixo
consumo.
Partindo do princpio onde exista a alimentao e conseqentemente uma condio
de reset gerada pelo microcontrolador, esta situao representada por um tringulo. Logo
aps o micro controlador executas as rotinas de inicializao, ativando o conversor AD e j
amostrando as variveis necessrias.
De posse das informaes o microcontrolador executa rotinas de verificao de
bateria, habilitao ou no da recarga da bateria, configurao e transmisso dos dados,
verificao da existncia de tenso induzida e as rotinas de entrada e sada do modo de baixo
consumo, conforme apresentado na Figura 3.13.
89
Figura 3.13: Diagrama de execuo do programa do microcontrolador.
90
3.6.1 Configurao do mdulo TRW-24G
Atravs do programa desenvolvido para o MSP430, necessrio realizar a
configurao do mdulo TRW-24G, fabricado pela empresa Whensing, como transmissor, em
modo ShockBurst, payload de 32bits. Esta configurao realizada apenas na inicializao
do sistema atravs de comunicao serial sncrona. Os sinais existentes nos pinos CE, CS,
CLK e DATA durante esta configurao so apresentados na Figura 3.14.
Figura 3.14: Configurao do mdulo TRW-24G como transmissor.
3.6.2 Transmisso dos dados atravs do mdulo TRW-24G
Logo aps a rotina de inicializao do microcontrolador ele executa uma rotina de
lao infinito que consiste em amostrar todos os canais do conversor analgico digital,
processar os canais de interesse, transmitir as informaes necessrias como presso, tenso
de alimentao do processador e tenso da bateria. A Figura 3.15 demonstra os sinais
existentes nos pinos CE, CS, CLK, DATA, durante a transmisso do valor mximo de um
canal AD de 10bits, ou seja, AD = 1023.
91
Figura 3.15: Transmisso atravs do mdulo TRW-24G, dado.0x3FF.
Como os valores de presso podem assumir muitos valores durante as medies, a
Figura 3.16 demonstra os sinais existentes nos pinos CE, CS, CLK, DATA, durante a
transmisso de um valor aleatrio. E posteriormente a Figura 3.17 exibe os sinais existentes
nos pinos CE, CS, CLK, DATA, durante a transmisso do valor de um canal AD = 0.
Figura 3.16: Transmisso de um valor aleatrio atravs do mdulo TRW-24G
92
Figura 3.17: Transmisso de um canal AD = 0, atravs do mdulo TRW-24G
A transmisso ocorre em intervalos de aproximadamente 2 segundos e seu consumo
durante a transmisso no ultrapassa o limite de 14mA, com potncia de 0dBm em modo
ShockBurst.
A transmisso foi verificada com o analisador de espectro FS300, garantindo que a
mesma estava sendo executada na freqncia correta, previamente especificada em 2412MHz.
Na Figura 3.18 o modo ShockBurst e o espalhamento espectral que o mesmo executa so
exibidos. Esta figura foi obtida com uma medio na regio do espectro nas proximidades da
freqncia configurada, com a funo Max Hold do instrumento foram armazenados todos os
picos de potncia, cada pico de potncia representa uma transmisso, que ocorre a cada 2
segundos, o tempo total de medio foi de aproximadamente 2 minutos.
93
Figura 3.18: Espalhamento espectral na transmisso.
3.7 MONTAGEM EM PNEU DE USO AUTOMOTIVO
Os pneus denominados radiais tm como caracterstica de construo a insero de
uma malha estrutural em ao. Surgiu ento, a necessidade de verificar a interferncia gerada
por montar o circuito medidor dentro de um pneu radial. Observou-se que a maior
concentrao desta malha de ao est na banda de rodagem, a partir desta constatao optou-
se por posicionar as bobinas primria e secundria, de modo que o fluxo magntico ocorresse
pela lateral do pneu.
As bobinas so dispostas de forma a induzir o campo magntico pela lateral do pneu,
garantindo a menor interferncia da estrutura do pneu. A Figura 3.19 mostra a forma de
fixao da placa dentro do pneu, abaixo da sua linha de montagem, garantindo que o circuito
no ser danificado durante a insero, ou retirada, do pneu.
94
Figura 3.19: Montagem do circuito de medio e transmisso na roda automotiva.
A mangueira que aparece na imagem foi usada para conectar um instrumento a fim
de calibrar o conjunto de medio. De forma a garantir o menor ds-balanceamento da roda
no lado oposto ao circuito de medio e transmisso est fixada a bobina secundria, esta que
est apresentada na Figura 3.20, as bobinas primria e secundria devem estar em perfeito
alinhamento para garantir a mxima eficincia na transferncia do campo eletromagntico que
induzir tenso na bobina secundria fixada na roda, dentro do pneu.
95
Figura 3.20: Montagem das bobinas na roda automotiva.
3.8 SOFTWARE DE RECEPO DOS DADOS
Para a recepo dos dados, foi criado um software compatvel com Windows XP,
para a apresentao dos dados relevantes, este software foi desenvolvido em Visual Basic.net,
as variveis sero adquiridas atravs do kit educacional Nordic nRF2401 EVBOARD + nRF
96
Configuration Board, com interface serial a velocidade de 115200kbps, oito bits de dados,
sem paridade e com um stop bit. O formato dos dados enviados via serial para o computador
pessoal esto demonstrados na Figura 3.21.
Figura 3.21: Formato dos dados enviados pelo kit de aprendizagem Nordic.
A aparncia do software est apresentada na Figura 3.22, possuindo as facilidades
do ambiente Windows e se fosse necessrio ele poderia se modificado para exibio de um
grfico em funo do tempo, tenso de bateria em funo do tempo, essas combinaes
poderiam refinar os dados de consumo da bateria e, ou a variao da presso em funo do
tempo. Por exemplo, indicando o momento exato que ocorresse uma perda de presso
considervel, caracterizando um furo no pneu. O cdigo fonte do programa tpms.exe est
informado no Apndice I.
97
Figura 3.22: Interface do software tpms.exe.
3.9 CALIBRAO DAS MEDIDAS DE PRESSO
Os resultados obtidos no computador pessoal precisam ser validados, a partir desta
necessidade o valor indicado era comparado com um medidor e gerador de presso ou vcuo,
fabricado pela empresa Mityvacc, modelo MV6255. Esta ferramenta capaz de gerar presso
de 25PSIg ou vcuo de -12,5PSIg, dentro desta faixa foi possvel calibrar os dados enviados
pelo TPMS de modo a garantir um erro de 0,5%
FE
, ou seja um erro absoluto inferior a
0,25PSIg. A Figura 3.23 apresenta o MV6255.
98
Figura 3.23: Mityvacc MV6255.
99
4 RESULTADOS E CONCLUSES
De maneira geral a funcionalidade do TPMS projetado foi amplamente satisfatria,
todos os itens em questo esto funcionando plenamente. A aquisio dos valores de presso e
tenso ocorrem perfeitamente quando o circuito dentro do pneu recebe a induo de energia
externa.
Os elementos principais do projeto do TPMS implementado com os prottipos
desenvolvidos neste trabalho so: carga de bateria atravs de induo de tenso, programao
do microcontrolador, transmisso dos dados de interesse, deteco pelo microcontrolador que
o circuito recebeu tenso induzida e retornar do modo de baixo consumo e, ou detectar a
inexistncia de tenso induzida.
O modo de baixo consumo pode ser considerado o ponto forte deste processador.
Podemos entender este modo de trabalho como uma hibernao com a principal funo de
economizar a carga da bateria.
100
Inmeras dificuldades foram encontradas na elaborao deste trabalho, sendo a
principal delas a burocracia alfandegria para a aquisio dos componentes importados e a
obteno de suporte tcnico com os respectivos fabricantes.
A montagem mecnica do circuito de medio pode ser melhorada desenvolvendo
em uma nica pastilha todo o circuito, de forma a minimizar ao mximo e garantindo a
reduo do peso e reduzindo os efeitos colaterais ao conjunto de rodagem como o ds-
balanceamento do conjunto.
A dificuldade de montagem pode ser resolvida elaborando um conjunto de rodas
com salincias pr-definidas para o encaixe dos componentes necessrios para a aquisio dos
dados.
O circuito em questo foi projetado para um range de 0 a 50 PSIg, podendo ser
aplicado a todos os tipos de veculos desde bicicletas de competio, veculos de construo
civil, carros e caminhes da frota de grandes empresas, entre inmeras outras aplicaes.
O conjunto de medio extremamente verstil, algumas modificaes podem ser
efetuadas de modo que o conjunto passe a transmitir som, temperatura, neste caso presso nos
mais diversos ambientes industriais ou residncias.
O TPMS pode salvar vidas, evitar acidentes ou o desgaste prematuro dos pneus do
veculo, at mesmo avisar que existe algum pneu com presso inferior que levaria a um
consumo elevado de combustvel. A calibragem correta dos pneus pode representar uma
economia de at 10% no consumo de combustvel, ou ainda evitar danos ao conjunto de
101
rodagem de certos carros que utilizam pneus e rodas em que o custo do conjunto de rodagem
chega a superar com folga o preo total do TPMS.
O uso do TPMS no significa deixar de lado a verificao regular do estado dos
pneus, pois o mesmo no pode fornecer indicaes de desgaste ou outras situaes
que no alterem a presso do conjunto.
102
REFERNCIAS BIBLIOGRFICAS
[1] BONJORNO, Regina Azenha; BONJORNO, Jos Roberto; BONJORNO, Valter;
CLINTON, Marcio Ramos. Fsica fundamental: 2 grau volume nico. So Paulo, SP: FTD,
1993. 496 p.
[2] TIPLER, Paul Allen. Fsica: para cientistas e engenheiros: fsica moderna: mecnica
quntica, relatividade e a estrutura da matria. 4. ed. Rio de Janeiro: LTC, 2000. 187 p.
[3] TEXAS, Instruments Incorporated. MSP430x1xx Family User's Guide (Rev. F Dallas:
2006. 414p. Disponvel em: < http://focus.ti.com/lit/ug/slau049f/slau049f.pdf>. Acesso em: 4
nov. 2007.
[4] TEXAS, Instruments Incorporated. MSP430x11x2 Datasheet Dallas: 2004. 49p.
Disponvel em: < http://focus.ti.com/lit/ds/symlink/msp430f1232.pdf>. Acesso em: 4 nov.
2007.
[5] NORDIC, VLSI ASA. User manual for nRF2401-EVKIT_rev1.1 Tiller: 2003. 5p.
Disponvel em: < http://www.nordicsemi.com/files/Product/development_tools/nRF2401-
EVKITrev1_1.pdf>. Acesso em: 4 nov. 2007.
[6] NORDIC, VLSI ASA. Product Description - Evaluation Board nRF2401 Tiller: 2003. 18p.
Disponvel em: <http://www.nordicsemi.com/files/Product/development_tools/nRF2401-
EVBOARDrev1_1.pdf>. Acesso em: 4 nov. 2007.
[7] NORDIC, VLSI ASA. Product Specification - nRF2401 Datasheet Tiller: 2004. 39p.
Disponvel em: <http://www.nordicsemi.no/files/Product/data_sheet/nRF2401rev1_1.pdf>.
Acesso em: 4 nov. 2007.
[8] MEASUREMENT SPECIALTIES, inc. Product Description m50 Hampton: 2005. 2p.
Disponvel em: <http://www.meas-spec.com/myMeas/MEAS_download/datasheet/pdf/
pressure/M_50.pdf>. Acesso em: 27 nov. 2007.
[9] DAVID, F. Stout. Handbook of Operational Amplifier Circuit Design, McGraw-Hill, New
York, 1976 158p.
103
[10] MOTOROLA, Semiconductor. Product Specification MC34072 Datasheet 1994. 16p.
Disponvel em: <http://www.motorola.com/br/produtos/semicondutores/product/datasheet/
mc34072.pdf>. Acesso em: 2 out. 2007.
[11] WENSHING. Product Specification TRW-24G Datasheet Taipei: 2005. 55p.
Disponvel em: <http://www.wenshing.com.tw/data/rf-module/TRW-24G.pdf>. Acesso em: 5
nov. 2007.
[12] FIALHO, Arivelto Bustamante. Instrumentao Industrial: conceitos, aplicaes e
anlises. 2. ed. So Paulo, SP: rica, 2004. 276 p.
[13] SOARES, Marco MSPC Engenharia Site: <http://www.mspc.eng.br/fldetc/press1.asp>
Acesso em 10 nov. 2007
[14] Tabela de fios AWG. Site: <http://www.egeneral.com.br/TabelaAWG.htm>
[15] AGILENT, Product Information datasheet 54622D: Disponvel em:
<http://cp.literature.agilent.com/litweb/pdf/5968-8153EN.pdf> Acesso em 29 nov 2007.
[16] Hameg Instruments, Product Description datasheet HM-303-6: Disponvel em:
<http://www.hameg.com/downloads/dblatt/data_en_HM303-6.pdf > Acesso em 29 nov 2007.
[17] Rohde&Schwarz, Product Information datasheet FS300: Disponvel em:
<www2.rohde-schwarz.com/file/FS300_datsheet_pt.pdf > Acesso em 29 nov 2007.
[18] HALLIDAY, David; RESNICK, Robert; WALKER, Jearl. Fundamentos de fsica. 7. ed.
Rio de Janeiro, RJ: LTC, 2006. 4v.
104
APNDICE
APNDICE I: Cdigo fonte do programa tpms.exe.
105
Publ i c Cl ass For m1
I nher i t s Syst em. Wi ndows. For ms. For m
Pr i vat e mi ComPor t As I nt eger
Fr i end Wi t hEvent s bt nOpenComAs Syst em. Wi ndows. For ms. But t on
Fr i end Wi t hEvent s bt nCl oseComAs Syst em. Wi ndows. For ms. But t on
Fr i end Wi t hEvent s bt nTx As Syst em. Wi ndows. For ms. But t on
Fr i end Wi t hEvent s Label 5 As Syst em. Wi ndows. For ms. Label
Fr i end Wi t hEvent s t xt Byt es2Read As Syst em. Wi ndows. For ms. Text Box
Fr i end Wi t hEvent s Gr oupBox1 As Syst em. Wi ndows. For ms. Gr oupBox
Fr i end Wi t hEvent s opt Com2 As Syst em. Wi ndows. For ms. Radi oBut t on
Fr i end Wi t hEvent s opt Com1 As Syst em. Wi ndows. For ms. Radi oBut t on
Fr i end Wi t hEvent s t xt Ti meout As Syst em. Wi ndows. For ms. Text Box
Fr i end Wi t hEvent s Label 4 As Syst em. Wi ndows. For ms. Label
Fr i end Wi t hEvent s t xt Baudr at e As Syst em. Wi ndows. For ms. Text Box
Fr i end Wi t hEvent s Label 1 As Syst em. Wi ndows. For ms. Label
Fr i end Wi t hEvent s Tool Ti p1 As Syst em. Wi ndows. For ms. Tool Ti p
Fr i end Wi t hEvent s chkRTS As Syst em. Wi ndows. For ms. CheckBox
Fr i end Wi t hEvent s chkDTR As Syst em. Wi ndows. For ms. CheckBox
Fr i end Wi t hEvent s bt nExi t As Syst em. Wi ndows. For ms. But t on
Pr i vat e Wi t hEvent s moRS232 As Rs232
Pr i vat e ml Ti cks As Long
Pr i vat e Del egat e Sub CommEvent Updat e( ByVal sour ce As Rs232, ByVal
mask As Rs232. Event Masks)
#Regi on " Wi ndows For mDesi gner gener at ed code "
Publ i c Sub New( )
MyBase. New( )
' Thi s cal l i s r equi r ed by t he Wi ndows For mDesi gner .
I ni t i al i zeComponent ( )
' Add any i ni t i al i zat i on af t er t he I ni t i al i zeComponent ( ) cal l
End Sub
' For mover r i des di spose t o cl ean up t he component l i st .
Pr ot ect ed Over l oads Over r i des Sub Di spose( ByVal di sposi ng As Bool ean)
I f di sposi ng Then
I f Not ( component s I s Not hi ng) Then
component s. Di spose( )
End I f
End I f
MyBase. Di spose( di sposi ng)
End Sub
Pr i vat e component s As Syst em. Component Model . I Cont ai ner
' Requi r ed by t he Wi ndows For mDesi gner
' NOTE: The f ol l owi ng pr ocedur e i s r equi r ed by t he Wi ndows For m
Desi gner
' I t can be modi f i ed usi ng t he Wi ndows For mDesi gner .
' Do not modi f y i t usi ng t he code edi t or .
Fr i end Wi t hEvent s Label 8 As Syst em. Wi ndows. For ms. Label
Fr i end Wi t hEvent s t xt Por t NumAs Syst em. Wi ndows. For ms. Text Box
Fr i end Wi t hEvent s bt nTest As Syst em. Wi ndows. For ms. But t on
Fr i end Wi t hEvent s Ti mer 1 As Syst em. Wi ndows. For ms. Ti mer
Fr i end Wi t hEvent s Gr oupBox2 As Syst em. Wi ndows. For ms. Gr oupBox
Fr i end Wi t hEvent s Text Box1 As Syst em. Wi ndows. For ms. Text Box
106
Fr i end Wi t hEvent s Gr oupBox4 As Syst em. Wi ndows. For ms. Gr oupBox
Fr i end Wi t hEvent s Label 6 As Syst em. Wi ndows. For ms. Label
Fr i end Wi t hEvent s Panel 1 As Syst em. Wi ndows. For ms. Panel
Fr i end Wi t hEvent s Mai nMenu1 As Syst em. Wi ndows. For ms. Mai nMenu
Fr i end Wi t hEvent s MenuI t em1 As Syst em. Wi ndows. For ms. MenuI t em
Fr i end Wi t hEvent s MenuI t em2 As Syst em. Wi ndows. For ms. MenuI t em
Fr i end Wi t hEvent s MenuI t em3 As Syst em. Wi ndows. For ms. MenuI t em
Fr i end Wi t hEvent s MenuI t em4 As Syst em. Wi ndows. For ms. MenuI t em
Fr i end Wi t hEvent s Pr ogr essBar 1 As Syst em. Wi ndows. For ms. Pr ogr essBar
Fr i end Wi t hEvent s Text Box2 As Syst em. Wi ndows. For ms. Text Box
Fr i end Wi t hEvent s Label 2 As Syst em. Wi ndows. For ms. Label
Fr i end Wi t hEvent s Panel 2 As Syst em. Wi ndows. For ms. Panel
Fr i end Wi t hEvent s Panel 3 As Syst em. Wi ndows. For ms. Panel
Fr i end Wi t hEvent s Gr oupBox3 As Syst em. Wi ndows. For ms. Gr oupBox
Fr i end Wi t hEvent s Pr ogr essBar 2 As Syst em. Wi ndows. For ms. Pr ogr essBar
Fr i end Wi t hEvent s Text Box3 As Syst em. Wi ndows. For ms. Text Box
Fr i end Wi t hEvent s Label 3 As Syst em. Wi ndows. For ms. Label
Fr i end Wi t hEvent s Gr oupBox5 As Syst em. Wi ndows. For ms. Gr oupBox
<Syst em. Di agnost i cs. Debugger St epThr ough( ) > Pr i vat e Sub
I ni t i al i zeComponent ( )
Me. component s = New Syst em. Component Model . Cont ai ner
Di mr esour ces As Syst em. Resour ces. Resour ceManager = New
Syst em. Resour ces. Resour ceManager ( Get Type( For m1) )
Me. Tool Ti p1 = New Syst em. Wi ndows. For ms. Tool Ti p( Me. component s)
Me. chkRTS = New Syst em. Wi ndows. For ms. CheckBox
Me. bt nTx = New Syst em. Wi ndows. For ms. But t on
Me. t xt Ti meout = New Syst em. Wi ndows. For ms. Text Box
Me. bt nOpenCom= New Syst em. Wi ndows. For ms. But t on
Me. t xt Baudr at e = New Syst em. Wi ndows. For ms. Text Box
Me. t xt Byt es2Read = New Syst em. Wi ndows. For ms. Text Box
Me. chkDTR = New Syst em. Wi ndows. For ms. CheckBox
Me. t xt Por t Num= New Syst em. Wi ndows. For ms. Text Box
Me. bt nTest = New Syst em. Wi ndows. For ms. But t on
Me. Label 5 = New Syst em. Wi ndows. For ms. Label
Me. Label 1 = New Syst em. Wi ndows. For ms. Label
Me. Label 4 = New Syst em. Wi ndows. For ms. Label
Me. opt Com1 = New Syst em. Wi ndows. For ms. Radi oBut t on
Me. bt nCl oseCom= New Syst em. Wi ndows. For ms. But t on
Me. opt Com2 = New Syst em. Wi ndows. For ms. Radi oBut t on
Me. Gr oupBox1 = New Syst em. Wi ndows. For ms. Gr oupBox
Me. Panel 1 = New Syst em. Wi ndows. For ms. Panel
Me. Label 8 = New Syst em. Wi ndows. For ms. Label
Me. bt nExi t = New Syst em. Wi ndows. For ms. But t on
Me. Ti mer 1 = New Syst em. Wi ndows. For ms. Ti mer ( Me. component s)
Me. Gr oupBox2 = New Syst em. Wi ndows. For ms. Gr oupBox
Me. Text Box1 = New Syst em. Wi ndows. For ms. Text Box
Me. Gr oupBox4 = New Syst em. Wi ndows. For ms. Gr oupBox
Me. Label 6 = New Syst em. Wi ndows. For ms. Label
Me. Mai nMenu1 = New Syst em. Wi ndows. For ms. Mai nMenu
Me. MenuI t em1 = New Syst em. Wi ndows. For ms. MenuI t em
Me. MenuI t em2 = New Syst em. Wi ndows. For ms. MenuI t em
Me. MenuI t em3 = New Syst em. Wi ndows. For ms. MenuI t em
Me. MenuI t em4 = New Syst em. Wi ndows. For ms. MenuI t em
Me. Pr ogr essBar 1 = New Syst em. Wi ndows. For ms. Pr ogr essBar
Me. Text Box2 = New Syst em. Wi ndows. For ms. Text Box
Me. Label 2 = New Syst em. Wi ndows. For ms. Label
Me. Panel 2 = New Syst em. Wi ndows. For ms. Panel
Me. Panel 3 = New Syst em. Wi ndows. For ms. Panel
Me. Gr oupBox3 = New Syst em. Wi ndows. For ms. Gr oupBox
Me. Pr ogr essBar 2 = New Syst em. Wi ndows. For ms. Pr ogr essBar
Me. Text Box3 = New Syst em. Wi ndows. For ms. Text Box
107
Me. Label 3 = New Syst em. Wi ndows. For ms. Label
Me. Gr oupBox5 = New Syst em. Wi ndows. For ms. Gr oupBox
Me. Gr oupBox1. SuspendLayout ( )
Me. Gr oupBox4. SuspendLayout ( )
Me. SuspendLayout ( )
'
' chkRTS
'
Me. chkRTS. Checked = Tr ue
Me. chkRTS. CheckSt at e = Syst em. Wi ndows. For ms. CheckSt at e. Checked
Me. chkRTS. Fl at St yl e = Syst em. Wi ndows. For ms. Fl at St yl e. Syst em
Me. chkRTS. Locat i on = New Syst em. Dr awi ng. Poi nt ( 212, 104)
Me. chkRTS. Name = " chkRTS"
Me. chkRTS. Si ze = New Syst em. Dr awi ng. Si ze( 63, 19)
Me. chkRTS. TabI ndex = 3
Me. chkRTS. Text = " RTS"
Me. Tool Ti p1. Set Tool Ti p( Me. chkRTS, " Set st at e of RTS Li ne" )
'
' bt nTx
'
Me. bt nTx. Enabl ed = Fal se
Me. bt nTx. Locat i on = New Syst em. Dr awi ng. Poi nt ( 375, 35)
Me. bt nTx. Name = " bt nTx"
Me. bt nTx. Si ze = New Syst em. Dr awi ng. Si ze( 112, 19)
Me. bt nTx. TabI ndex = 7
Me. bt nTx. Text = " Envi ar "
Me. Tool Ti p1. Set Tool Ti p( Me. bt nTx, " Sends dat a t o COM Por t " )
'
' t xt Ti meout
'
Me. t xt Ti meout . Bor der St yl e =
Syst em. Wi ndows. For ms. Bor der St yl e. Fi xedSi ngl e
Me. t xt Ti meout . Locat i on = New Syst em. Dr awi ng. Poi nt ( 69, 36)
Me. t xt Ti meout . Name = " t xt Ti meout "
Me. t xt Ti meout . Si ze = New Syst em. Dr awi ng. Si ze( 49, 21)
Me. t xt Ti meout . TabI ndex = 3
Me. t xt Ti meout . Text = " 1500"
Me. Tool Ti p1. Set Tool Ti p( Me. t xt Ti meout , " COM Por t t i meout i n ms" )
'
' bt nOpenCom
'
Me. bt nOpenCom. Locat i on = New Syst em. Dr awi ng. Poi nt ( 210, 33)
Me. bt nOpenCom. Name = " bt nOpenCom"
Me. bt nOpenCom. Si ze = New Syst em. Dr awi ng. Si ze( 95, 27)
Me. bt nOpenCom. TabI ndex = 1
Me. bt nOpenCom. Text = " Abr i r Por t a"
Me. Tool Ti p1. Set Tool Ti p( Me. bt nOpenCom, " I ni t i al i zes and Open COM
por t " )
'
' t xt Baudr at e
'
Me. t xt Baudr at e. Bor der St yl e =
Syst em. Wi ndows. For ms. Bor der St yl e. Fi xedSi ngl e
Me. t xt Baudr at e. Locat i on = New Syst em. Dr awi ng. Poi nt ( 69, 72)
Me. t xt Baudr at e. Name = " t xt Baudr at e"
Me. t xt Baudr at e. Si ze = New Syst em. Dr awi ng. Si ze( 49, 21)
Me. t xt Baudr at e. TabI ndex = 5
Me. t xt Baudr at e. Text = " 115200"
Me. Tool Ti p1. Set Tool Ti p( Me. t xt Baudr at e, " COM Por t Baudr at e" )
'
' t xt Byt es2Read
108
'
Me. t xt Byt es2Read. Bor der St yl e =
Syst em. Wi ndows. For ms. Bor der St yl e. Fi xedSi ngl e
Me. t xt Byt es2Read. Locat i on = New Syst em. Dr awi ng. Poi nt ( 682, 189)
Me. t xt Byt es2Read. Name = " t xt Byt es2Read"
Me. t xt Byt es2Read. Si ze = New Syst em. Dr awi ng. Si ze( 40, 21)
Me. t xt Byt es2Read. TabI ndex = 12
Me. t xt Byt es2Read. Text = " 2"
Me. Tool Ti p1. Set Tool Ti p( Me. t xt Byt es2Read, " Byt es t o r ead f r omCOM
buf f er ( t hi s number ef f ect s al so CommEvent ) " )
'
' chkDTR
'
Me. chkDTR. Checked = Tr ue
Me. chkDTR. CheckSt at e = Syst em. Wi ndows. For ms. CheckSt at e. Checked
Me. chkDTR. Fl at St yl e = Syst em. Wi ndows. For ms. Fl at St yl e. Syst em
Me. chkDTR. Locat i on = New Syst em. Dr awi ng. Poi nt ( 260, 104)
Me. chkDTR. Name = " chkDTR"
Me. chkDTR. Si ze = New Syst em. Dr awi ng. Si ze( 63, 19)
Me. chkDTR. TabI ndex = 4
Me. chkDTR. Text = " DTR"
Me. Tool Ti p1. Set Tool Ti p( Me. chkDTR, " Set st at e of DTR Li ne" )
'
' t xt Por t Num
'
Me. t xt Por t Num. Bor der St yl e =
Syst em. Wi ndows. For ms. Bor der St yl e. Fi xedSi ngl e
Me. t xt Por t Num. Locat i on = New Syst em. Dr awi ng. Poi nt ( 132, 48)
Me. t xt Por t Num. Name = " t xt Por t Num"
Me. t xt Por t Num. Si ze = New Syst em. Dr awi ng. Si ze( 49, 21)
Me. t xt Por t Num. TabI ndex = 6
Me. t xt Por t Num. Text = " 1"
Me. Tool Ti p1. Set Tool Ti p( Me. t xt Por t Num, " Ent er por t number " )
'
' bt nTest
'
Me. bt nTest . Locat i on = New Syst em. Dr awi ng. Poi nt ( 132, 76)
Me. bt nTest . Name = " bt nTest "
Me. bt nTest . Si ze = New Syst em. Dr awi ng. Si ze( 49, 17)
Me. bt nTest . TabI ndex = 7
Me. bt nTest . Text = " Test "
Me. Tool Ti p1. Set Tool Ti p( Me. bt nTest , " Test por t avai l abi l i t y" )
'
' Label 5
'
Me. Label 5. Locat i on = New Syst em. Dr awi ng. Poi nt ( 665, 174)
Me. Label 5. Name = " Label 5"
Me. Label 5. Si ze = New Syst em. Dr awi ng. Si ze( 58, 14)
Me. Label 5. TabI ndex = 11
Me. Label 5. Text = " Byt es t o r ead"
'
' Label 1
'
Me. Label 1. Locat i on = New Syst em. Dr awi ng. Poi nt ( 69, 22)
Me. Label 1. Name = " Label 1"
Me. Label 1. Si ze = New Syst em. Dr awi ng. Si ze( 82, 14)
Me. Label 1. TabI ndex = 2
Me. Label 1. Text = " Ti meout ( ms) "
'
' Label 4
'
109
Me. Label 4. Locat i on = New Syst em. Dr awi ng. Poi nt ( 69, 58)
Me. Label 4. Name = " Label 4"
Me. Label 4. Si ze = New Syst em. Dr awi ng. Si ze( 82, 14)
Me. Label 4. TabI ndex = 4
Me. Label 4. Text = " BaudRat e"
'
' opt Com1
'
Me. opt Com1. Checked = Tr ue
Me. opt Com1. Locat i on = New Syst em. Dr awi ng. Poi nt ( 10, 30)
Me. opt Com1. Name = " opt Com1"
Me. opt Com1. Si ze = New Syst em. Dr awi ng. Si ze( 64, 26)
Me. opt Com1. TabI ndex = 0
Me. opt Com1. TabSt op = Tr ue
Me. opt Com1. Text = " COM &1"
'
' bt nCl oseCom
'
Me. bt nCl oseCom. Enabl ed = Fal se
Me. bt nCl oseCom. Locat i on = New Syst em. Dr awi ng. Poi nt ( 211, 65)
Me. bt nCl oseCom. Name = " bt nCl oseCom"
Me. bt nCl oseCom. Si ze = New Syst em. Dr awi ng. Si ze( 95, 27)
Me. bt nCl oseCom. TabI ndex = 2
Me. bt nCl oseCom. Text = " Fechar Por t a"
'
' opt Com2
'
Me. opt Com2. Locat i on = New Syst em. Dr awi ng. Poi nt ( 10, 50)
Me. opt Com2. Name = " opt Com2"
Me. opt Com2. Si ze = New Syst em. Dr awi ng. Si ze( 66, 26)
Me. opt Com2. TabI ndex = 1
Me. opt Com2. Text = " COM &2"
'
' Gr oupBox1
'
Me. Gr oupBox1. Cont r ol s. Add( Me. Panel 1)
Me. Gr oupBox1. Cont r ol s. Add( Me. Label 8)
Me. Gr oupBox1. Cont r ol s. Add( Me. bt nTest )
Me. Gr oupBox1. Cont r ol s. Add( Me. t xt Por t Num)
Me. Gr oupBox1. Cont r ol s. Add( Me. t xt Ti meout )
Me. Gr oupBox1. Cont r ol s. Add( Me. Label 4)
Me. Gr oupBox1. Cont r ol s. Add( Me. t xt Baudr at e)
Me. Gr oupBox1. Cont r ol s. Add( Me. Label 1)
Me. Gr oupBox1. Cont r ol s. Add( Me. opt Com2)
Me. Gr oupBox1. Cont r ol s. Add( Me. opt Com1)
Me. Gr oupBox1. Locat i on = New Syst em. Dr awi ng. Poi nt ( 8, 11)
Me. Gr oupBox1. Name = " Gr oupBox1"
Me. Gr oupBox1. Si ze = New Syst em. Dr awi ng. Si ze( 336, 124)
Me. Gr oupBox1. TabI ndex = 0
Me. Gr oupBox1. TabSt op = Fal se
Me. Gr oupBox1. Text = " COM Set up"
'
' Panel 1
'
Me. Panel 1. Locat i on = New Syst em. Dr awi ng. Poi nt ( 191, 86)
Me. Panel 1. Name = " Panel 1"
Me. Panel 1. Si ze = New Syst em. Dr awi ng. Si ze( 124, 35)
Me. Panel 1. TabI ndex = 9
'
' Label 8
'
110
Me. Label 8. Locat i on = New Syst em. Dr awi ng. Poi nt ( 132, 32)
Me. Label 8. Name = " Label 8"
Me. Label 8. Si ze = New Syst em. Dr awi ng. Si ze( 58, 14)
Me. Label 8. TabI ndex = 8
Me. Label 8. Text = " Por t check"
'
' bt nExi t
'
Me. bt nExi t . Anchor =
CType( ( ( Syst em. Wi ndows. For ms. Anchor St yl es. Bot t omOr
Syst em. Wi ndows. For ms. Anchor St yl es. Lef t ) _
Or Syst em. Wi ndows. For ms. Anchor St yl es. Ri ght ) ,
Syst em. Wi ndows. For ms. Anchor St yl es)
Me. bt nExi t . Locat i on = New Syst em. Dr awi ng. Poi nt ( 550, 408)
Me. bt nExi t . Name = " bt nExi t "
Me. bt nExi t . Si ze = New Syst em. Dr awi ng. Si ze( 171, 23)
Me. bt nExi t . TabI ndex = 14
Me. bt nExi t . Text = " &Fechar "
'
' Ti mer 1
'
Me. Ti mer 1. I nt er val = 1000
'
' Gr oupBox2
'
Me. Gr oupBox2. Locat i on = New Syst em. Dr awi ng. Poi nt ( 357, 11)
Me. Gr oupBox2. Name = " Gr oupBox2"
Me. Gr oupBox2. Si ze = New Syst em. Dr awi ng. Si ze( 208, 58)
Me. Gr oupBox2. TabI ndex = 37
Me. Gr oupBox2. TabSt op = Fal se
Me. Gr oupBox2. Text = " Conf i gur aco do r ecept or "
'
' Text Box1
'
Me. Text Box1. BackCol or = Syst em. Dr awi ng. Col or . Si l ver
Me. Text Box1. Bor der St yl e =
Syst em. Wi ndows. For ms. Bor der St yl e. Fi xedSi ngl e
Me. Text Box1. Font = New Syst em. Dr awi ng. Font ( " Ver dana" , 99. 75! ,
Syst em. Dr awi ng. Font St yl e. Regul ar , Syst em. Dr awi ng. Gr aphi csUni t . Poi nt ,
CType( 0, Byt e) )
Me. Text Box1. For eCol or = Syst em. Dr awi ng. Col or . Red
Me. Text Box1. Locat i on = New Syst em. Dr awi ng. Poi nt ( 82, 38)
Me. Text Box1. Name = " Text Box1"
Me. Text Box1. Si ze = New Syst em. Dr awi ng. Si ze( 446, 169)
Me. Text Box1. TabI ndex = 38
Me. Text Box1. Tag = " "
Me. Text Box1. Text = " "
Me. Text Box1. Text Al i gn =
Syst em. Wi ndows. For ms. Hor i zont al Al i gnment . Cent er
'
' Gr oupBox4
'
Me. Gr oupBox4. Cont r ol s. Add( Me. Text Box1)
Me. Gr oupBox4. Cont r ol s. Add( Me. Label 6)
Me. Gr oupBox4. Locat i on = New Syst em. Dr awi ng. Poi nt ( 10, 152)
Me. Gr oupBox4. Name = " Gr oupBox4"
Me. Gr oupBox4. Si ze = New Syst em. Dr awi ng. Si ze( 713, 238)
Me. Gr oupBox4. TabI ndex = 41
Me. Gr oupBox4. TabSt op = Fal se
Me. Gr oupBox4. Text = " Pr esso"
'
111
' Label 6
'
Me. Label 6. Font = New Syst em. Dr awi ng. Font ( " Tahoma" , 48. 0! ,
Syst em. Dr awi ng. Font St yl e. Regul ar , Syst em. Dr awi ng. Gr aphi csUni t . Poi nt ,
CType( 0, Byt e) )
Me. Label 6. Locat i on = New Syst em. Dr awi ng. Poi nt ( 533, 72)
Me. Label 6. Name = " Label 6"
Me. Label 6. Si ze = New Syst em. Dr awi ng. Si ze( 137, 99)
Me. Label 6. TabI ndex = 39
Me. Label 6. Text = " psi "
'
' Mai nMenu1
'
Me. Mai nMenu1. MenuI t ems. AddRange( New Syst em. Wi ndows. For ms. MenuI t em( )
{Me. MenuI t em1, Me. MenuI t em3})
'
' MenuI t em1
'
Me. MenuI t em1. I ndex = 0
Me. MenuI t em1. MenuI t ems. AddRange( New Syst em. Wi ndows. For ms. MenuI t em( )
{Me. MenuI t em2})
Me. MenuI t em1. Text = " Ar qui vo"
'
' MenuI t em2
'
Me. MenuI t em2. I ndex = 0
Me. MenuI t em2. Text = " Fechar "
'
' MenuI t em3
'
Me. MenuI t em3. I ndex = 1
Me. MenuI t em3. MenuI t ems. AddRange( New Syst em. Wi ndows. For ms. MenuI t em( )
{Me. MenuI t em4})
Me. MenuI t em3. Text = " Aj uda"
'
' MenuI t em4
'
Me. MenuI t em4. I ndex = 0
Me. MenuI t em4. Text = " Sobr e. . . "
'
' Pr ogr essBar 1
'
Me. Pr ogr essBar 1. Locat i on = New Syst em. Dr awi ng. Poi nt ( 375, 97)
Me. Pr ogr essBar 1. Maxi mum= 42
Me. Pr ogr essBar 1. Name = " Pr ogr essBar 1"
Me. Pr ogr essBar 1. Si ze = New Syst em. Dr awi ng. Si ze( 92, 17)
Me. Pr ogr essBar 1. St ep = 1
Me. Pr ogr essBar 1. TabI ndex = 42
'
' Text Box2
'
Me. Text Box2. BackCol or = Syst em. Dr awi ng. Col or . Dar kGr ay
Me. Text Box2. Bor der St yl e =
Syst em. Wi ndows. For ms. Bor der St yl e. Fi xedSi ngl e
Me. Text Box2. Font = New Syst em. Dr awi ng. Font ( " Tahoma" , 8. 25! ,
Syst em. Dr awi ng. Font St yl e. Bol d, Syst em. Dr awi ng. Gr aphi csUni t . Poi nt , CType( 0,
Byt e) )
Me. Text Box2. Locat i on = New Syst em. Dr awi ng. Poi nt ( 483, 95)
Me. Text Box2. Name = " Text Box2"
Me. Text Box2. Si ze = New Syst em. Dr awi ng. Si ze( 62, 21)
Me. Text Box2. TabI ndex = 43
112
Me. Text Box2. Text = " "
Me. Text Box2. Text Al i gn =
Syst em. Wi ndows. For ms. Hor i zont al Al i gnment . Cent er
'
' Label 2
'
Me. Label 2. Font = New Syst em. Dr awi ng. Font ( " Tahoma" , 8. 25! ,
Syst em. Dr awi ng. Font St yl e. Bol d, Syst em. Dr awi ng. Gr aphi csUni t . Poi nt , CType( 0,
Byt e) )
Me. Label 2. Locat i on = New Syst em. Dr awi ng. Poi nt ( 548, 97)
Me. Label 2. Name = " Label 2"
Me. Label 2. Si ze = New Syst em. Dr awi ng. Si ze( 10, 23)
Me. Label 2. TabI ndex = 44
Me. Label 2. Text = " V"
'
' Panel 2
'
Me. Panel 2. BackCol or = Syst em. Dr awi ng. Col or . Tr anspar ent
Me. Panel 2. Bor der St yl e =
Syst em. Wi ndows. For ms. Bor der St yl e. Fi xedSi ngl e
Me. Panel 2. Locat i on = New Syst em. Dr awi ng. Poi nt ( 373, 95)
Me. Panel 2. Name = " Panel 2"
Me. Panel 2. Si ze = New Syst em. Dr awi ng. Si ze( 95, 20)
Me. Panel 2. TabI ndex = 45
'
' Panel 3
'
Me. Panel 3. Bor der St yl e =
Syst em. Wi ndows. For ms. Bor der St yl e. Fi xedSi ngl e
Me. Panel 3. Locat i on = New Syst em. Dr awi ng. Poi nt ( 468, 101)
Me. Panel 3. Name = " Panel 3"
Me. Panel 3. Si ze = New Syst em. Dr awi ng. Si ze( 4, 8)
Me. Panel 3. TabI ndex = 46
'
' Gr oupBox3
'
Me. Gr oupBox3. Locat i on = New Syst em. Dr awi ng. Poi nt ( 357, 76)
Me. Gr oupBox3. Name = " Gr oupBox3"
Me. Gr oupBox3. Si ze = New Syst em. Dr awi ng. Si ze( 209, 59)
Me. Gr oupBox3. TabI ndex = 47
Me. Gr oupBox3. TabSt op = Fal se
Me. Gr oupBox3. Text = " St at us da Bat er i a"
'
' Pr ogr essBar 2
'
Me. Pr ogr essBar 2. Enabl ed = Fal se
Me. Pr ogr essBar 2. Locat i on = New Syst em. Dr awi ng. Poi nt ( 160, 414)
Me. Pr ogr essBar 2. Maxi mum= 6
Me. Pr ogr essBar 2. Name = " Pr ogr essBar 2"
Me. Pr ogr essBar 2. Si ze = New Syst em. Dr awi ng. Si ze( 230, 13)
Me. Pr ogr essBar 2. TabI ndex = 48
Me. Pr ogr essBar 2. Vi si bl e = Fal se
'
' Text Box3
'
Me. Text Box3. BackCol or = Syst em. Dr awi ng. Col or . Dar kGr ay
Me. Text Box3. Bor der St yl e =
Syst em. Wi ndows. For ms. Bor der St yl e. Fi xedSi ngl e
Me. Text Box3. Font = New Syst em. Dr awi ng. Font ( " Tahoma" , 8. 25! ,
Syst em. Dr awi ng. Font St yl e. Bol d, Syst em. Dr awi ng. Gr aphi csUni t . Poi nt , CType( 0,
Byt e) )
113
Me. Text Box3. Locat i on = New Syst em. Dr awi ng. Poi nt ( 610, 96)
Me. Text Box3. Name = " Text Box3"
Me. Text Box3. Si ze = New Syst em. Dr awi ng. Si ze( 62, 21)
Me. Text Box3. TabI ndex = 49
Me. Text Box3. Text = " "
Me. Text Box3. Text Al i gn =
Syst em. Wi ndows. For ms. Hor i zont al Al i gnment . Cent er
'
' Label 3
'
Me. Label 3. Font = New Syst em. Dr awi ng. Font ( " Tahoma" , 8. 25! ,
Syst em. Dr awi ng. Font St yl e. Bol d, Syst em. Dr awi ng. Gr aphi csUni t . Poi nt , CType( 0,
Byt e) )
Me. Label 3. Locat i on = New Syst em. Dr awi ng. Poi nt ( 673, 98)
Me. Label 3. Name = " Label 3"
Me. Label 3. Si ze = New Syst em. Dr awi ng. Si ze( 10, 23)
Me. Label 3. TabI ndex = 50
Me. Label 3. Text = " V"
'
' Gr oupBox5
'
Me. Gr oupBox5. Locat i on = New Syst em. Dr awi ng. Poi nt ( 577, 76)
Me. Gr oupBox5. Name = " Gr oupBox5"
Me. Gr oupBox5. Si ze = New Syst em. Dr awi ng. Si ze( 135, 59)
Me. Gr oupBox5. TabI ndex = 51
Me. Gr oupBox5. TabSt op = Fal se
Me. Gr oupBox5. Text = " St at us da Al i ment ao"
'
' For m1
'
Me. Aut oScal eBaseSi ze = New Syst em. Dr awi ng. Si ze( 5, 14)
Me. Cl i ent Si ze = New Syst em. Dr awi ng. Si ze( 729, 439)
Me. Cont r ol s. Add( Me. Text Box3)
Me. Cont r ol s. Add( Me. Label 3)
Me. Cont r ol s. Add( Me. Pr ogr essBar 2)
Me. Cont r ol s. Add( Me. Gr oupBox4)
Me. Cont r ol s. Add( Me. t xt Byt es2Read)
Me. Cont r ol s. Add( Me. bt nExi t )
Me. Cont r ol s. Add( Me. Label 5)
Me. Cont r ol s. Add( Me. bt nTx)
Me. Cont r ol s. Add( Me. bt nCl oseCom)
Me. Cont r ol s. Add( Me. bt nOpenCom)
Me. Cont r ol s. Add( Me. Gr oupBox2)
Me. Cont r ol s. Add( Me. Gr oupBox1)
Me. Cont r ol s. Add( Me. chkDTR)
Me. Cont r ol s. Add( Me. chkRTS)
Me. Cont r ol s. Add( Me. Pr ogr essBar 1)
Me. Cont r ol s. Add( Me. Text Box2)
Me. Cont r ol s. Add( Me. Label 2)
Me. Cont r ol s. Add( Me. Panel 3)
Me. Cont r ol s. Add( Me. Panel 2)
Me. Cont r ol s. Add( Me. Gr oupBox3)
Me. Cont r ol s. Add( Me. Gr oupBox5)
Me. Font = New Syst em. Dr awi ng. Font ( " Tahoma" , 8. 25! ,
Syst em. Dr awi ng. Font St yl e. Regul ar , Syst em. Dr awi ng. Gr aphi csUni t . Poi nt ,
CType( 0, Byt e) )
Me. For mBor der St yl e =
Syst em. Wi ndows. For ms. For mBor der St yl e. Fi xedDi al og
Me. I con = CType( r esour ces. Get Obj ect ( " $t hi s. I con" ) ,
Syst em. Dr awi ng. I con)
Me. Maxi mi zeBox = Fal se
114
Me. Menu = Me. Mai nMenu1
Me. Name = " For m1"
Me. St ar t Posi t i on =
Syst em. Wi ndows. For ms. For mSt ar t Posi t i on. Cent er Scr een
Me. Text = " TPMS - Ti r e Pr essur e Moni t or i ng Syst em- Ander somBr emm"
Me. Gr oupBox1. ResumeLayout ( Fal se)
Me. Gr oupBox4. ResumeLayout ( Fal se)
Me. ResumeLayout ( Fal se)
End Sub
#End Regi on
Pr i vat e Sub bt nOpenCom_Cl i ck( ByVal sender As Syst em. Obj ect , ByVal e
As Syst em. Event Ar gs) Handl es bt nOpenCom. Cl i ck
moRS232 = New Rs232( )
Tr y
' / / Set up
Wi t h moRS232
. Por t = mi ComPor t
. BaudRat e = I nt 32. Par se( t xt Baudr at e. Text )
. Dat aBi t = 8
. St opBi t = Rs232. Dat aSt opBi t . St opBi t _1
. Par i t y = Rs232. Dat aPar i t y. Par i t y_None
. Ti meout = I nt 32. Par se( t xt Ti meout . Text )
End Wi t h
' / / i ni ci al i za por t as
moRS232. Open( )
' / / RTS / DTS
moRS232. Dt r = ( chkDTR. CheckSt at e = CheckSt at e. Checked)
moRS232. Rt s = ( chkRTS. CheckSt at e = CheckSt at e. Checked)
Cat ch Ex As Except i on
MessageBox. Show( Ex. Message, " Connect i on Er r or " ,
MessageBoxBut t ons. OK)
Fi nal l y
bt nCl oseCom. Enabl ed = moRS232. I sOpen
bt nOpenCom. Enabl ed = Not moRS232. I sOpen
bt nTx. Enabl ed = moRS232. I sOpen
End Tr y
End Sub
Pr i vat e Sub bt nCl oseCom_Cl i ck( ByVal sender As Syst em. Obj ect , ByVal e As
Syst em. Event Ar gs) Handl es bt nCl oseCom. Cl i ck
moRS232. Cl ose( )
bt nCl oseCom. Enabl ed = moRS232. I sOpen
bt nOpenCom. Enabl ed = Not moRS232. I sOpen
bt nTx. Enabl ed = moRS232. I sOpen
Ti mer 1. St op( )
count = 0
moRS232. Di sabl eEvent s( )
End Sub
Pr i vat e Sub For m1_Cl osi ng( ByVal sender As Obj ect , ByVal e As
Syst em. Component Model . Cancel Event Ar gs) Handl es MyBase. Cl osi ng
I f Not moRS232 I s Not hi ng Then
' / / Di sabl es Event s i f act i ve
moRS232. Di sabl eEvent s( )
I f moRS232. I sOpen Then moRS232. Cl ose( )
End I f
End Sub
115
Pr i vat e Sub But t on1_Cl i ck( ByVal sender As Syst em. Obj ect , ByVal e As
Syst em. Event Ar gs)
Tr y
moRS232. Read( I nt 32. Par se( t xt Byt es2Read. Text ) )
' / / Fi l l s l i st box wi t h hex val ues
Di maByt es As Byt e( ) = moRS232. I nput St r eam
Di mi Pnt As I nt 32
For i Pnt = 4 To aByt es. Lengt h - 1
Next
Cat ch Ex As Except i on
End Tr y
End Sub
Pr i vat e Sub chkDTR_Cl i ck( ByVal sender As Obj ect , ByVal e As
Syst em. Event Ar gs) Handl es chkDTR. Cl i ck
I f Not ( moRS232 I s Not hi ng) Then
moRS232. Dt r = chkDTR. CheckSt at e = CheckSt at e. Checked
End I f
End Sub
Pr i vat e Sub chkRTS_Cl i ck( ByVal sender As Obj ect , ByVal e As
Syst em. Event Ar gs) Handl es chkRTS. Cl i ck
I f Not ( moRS232 I s Not hi ng) Then
moRS232. Rt s = chkRTS. CheckSt at e = CheckSt at e. Checked
End I f
End Sub
Pr i vat e Sub bt nExi t _Cl i ck( ByVal sender As Syst em. Obj ect , ByVal e As
Syst em. Event Ar gs) Handl es bt nExi t . Cl i ck
Me. Cl ose( )
End Sub
Pr i vat e Sub opt Com1_CheckedChanged( ByVal sender As Syst em. Obj ect , ByVal
e As Syst em. Event Ar gs) Handl es opt Com1. CheckedChanged,
opt Com2. CheckedChanged
I f ( sender I s opt Com1) Then
mi ComPor t = 1
El se
mi ComPor t = 2
End I f
End Sub
Pr i vat e Sub bt nAsyncTx_Cl i ck( ByVal sender As Syst em. Obj ect , ByVal e As
Syst em. Event Ar gs)
ml Ti cks = Dat eTi me. Now. Ti cks
End Sub
Pr i vat e Sub moRS232_CommEvent ( ByVal sour ce As Rs232, ByVal Mask As
Rs232. Event Masks) Handl es moRS232. CommEvent
Debug. Asser t ( Me. I nvokeRequi r ed = Fal se)
Di mi Pnt As I nt 32, sBuf As St r i ng, Buf f er ( ) As Byt e
Di mMSB As I nt eger
Di mLSB As I nt eger
Di mSOMA As I nt eger
Di mPRESSAO As Doubl e
Di mVALI D As I nt eger
116
Di mt ensao_vcc As I nt eger
Di mt ensao_bat er i a As I nt eger
Di mt ensao_vcc_r eal As Doubl e
Di mt ensao_bat er i a_r eal As Doubl e
I f Not moRS232 I s Not hi ng Then
I f t xt Byt es2Read. Text . Lengt h = 0 Then
moRS232. RxBuf f er Thr eshol d = 1
El se
moRS232. RxBuf f er Thr eshol d = I nt 32. Par se( t xt Byt es2Read. Text )
End I f
End I f
Debug. Asser t ( Me. I nvokeRequi r ed = Fal se)
I f ( Mask And Rs232. Event Masks. RxChar ) > 0 Then
Buf f er = sour ce. I nput St r eam
VALI D = Buf f er ( 0)
MSB = Buf f er ( 5) * 256 ' Byt e mai s si gni f i cat i vo * 256
LSB = Buf f er ( 6) ' pega o Byt e menos si gni f i cat i vo
SOMA = MSB + LSB ' concat enacao dos doi s byt es
PRESSAO = SOMA / 20. 46 ' Cal cul o da pr essao
t ensao_vcc = Buf f er ( 4) ' Byt e mai s si gni f i cat i vo da t ensao *
256
t ensao_bat er i a = Buf f er ( 3) ' ' pega o Byt e menos si gni f i cat i vo da
t ensao
t ensao_vcc_r eal = t ensao_vcc / 10 ' cal cul o da t ensao vcc r eal
t ensao_bat er i a_r eal = t ensao_bat er i a / 10 ' cal cul o da t ensao da
bat er i a
I f VALI D = 209 Then
Text Box1. Text = St r i ng. For mat ( " {0}" , PRESSAO. ToSt r i ng( " F" ) )
' pr essao
Text Box3. Text = St r i ng. For mat ( " {0}" ,
t ensao_vcc_r eal . ToSt r i ng( " F" ) ) ' t ensao vcc
Text Box2. Text = St r i ng. For mat ( " {0}" ,
t ensao_bat er i a_r eal . ToSt r i ng( " F" ) ) ' t ensao da bat er i a
Pr ogr essBar 1. Val ue = t ensao_bat er i a
El se
Text Box1. Text = St r i ng. Empt y
Pr ogr essBar 1. Val ue = 0
End I f
End I f
End Sub
#Regi on " UI updat e r out i ne"
#End Regi on
Pr i vat e Sub l bAsync_Sel ect edI ndexChanged( ByVal sender As Syst em. Obj ect ,
ByVal e As Syst em. Event Ar gs)
End Sub
Pr i vat e Sub t xt Rx_BackCol or Changed( ByVal sender As Syst em. Obj ect , ByVal
e As Syst em. Event Ar gs)
End Sub
117
Pr i vat e Sub bt nTest _Cl i ck( ByVal sender As Syst em. Obj ect , ByVal e As
Syst em. Event Ar gs) Handl es bt nTest . Cl i ck
Tr y
I f Rs232. I sPor t Avai l abl e( I nt 32. Par se( t xt Por t Num. Text ) ) Then
MessageBox. Show( " Por t avai l abl e" , " Por t t est " ,
MessageBoxBut t ons. OK, MessageBoxI con. I nf or mat i on)
El se
MessageBox. Show( " Por t NOT avai l abl e" , " Por t t est " ,
MessageBoxBut t ons. OK, MessageBoxI con. Er r or )
End I f
Cat ch ex As Except i on
MessageBox. Show( " Por t t est f ai l ed" , " Por t t est " ,
MessageBoxBut t ons. OK, MessageBoxI con. Er r or )
End Tr y
End Sub
Pr i vat e Sub bt nTx_Cl i ck( ByVal sender As Syst em. Obj ect , ByVal e As
Syst em. Event Ar gs) Handl es bt nTx. Cl i ck
count = 0
moRS232. Di sabl eEvent s( )
Ti mer 1. St ar t ( )
' / / Cl ear Tx/ Rx Buf f er s
moRS232. Pur geBuf f er ( Rs232. Pur geBuf f er s. TxCl ear Or
Rs232. Pur geBuf f er s. RXCl ear )
End Sub
Di mcount As I nt eger ' auxi l i ar par a envi ar conf i gur acao
Pr i vat e Sub Ti mer 1_Ti ck( ByVal sender As Syst em. Obj ect , ByVal e As
Syst em. Event Ar gs) Handl es Ti mer 1. Ti ck
count = count + 1
Pr ogr essBar 2. Val ue = count
I f count = 1 Then
moRS232. Wr i t e( Chr ( 187) & Chr ( 7) & Chr ( 110) & Chr ( 82) & Chr ( 70)
& Chr ( 50) & Chr ( 52) & Chr ( 48) & Chr ( 49) )
Pr ogr essBar 2. Enabl ed = Tr ue
Pr ogr essBar 2. Vi si bl e = Tr ue
End I f
I f count = 2 Then
moRS232. Wr i t e( Chr ( 221) & Chr ( 7) )
End I f
I f count = 3 Then
moRS232. Wr i t e( Chr ( 204) & Chr ( 0) & Chr ( 0) & Chr ( 34) )
End I f
I f count = 4 Then
moRS232. Wr i t e( Chr ( 170) & Chr ( 18) & Chr ( 142) & Chr ( 8) & Chr ( 28)
& Chr ( 32) & Chr ( 32) & Chr ( 187) & Chr ( 187) & Chr ( 187) & Chr ( 187) & Chr ( 187)
& Chr ( 187) & Chr ( 187) & Chr ( 187) & Chr ( 187) & Chr ( 187) & Chr ( 161) &
Chr ( 111) & Chr ( 25) )
End I f
I f count = 5 Then
moRS232. Enabl eEvent s( )
End I f
I f count = 6 Then
Ti mer 1. St op( )
118
count = 0
Pr ogr essBar 2. Enabl ed = Fal se
Pr ogr essBar 2. Vi si bl e = Fal se
End I f
End Sub
Pr i vat e Sub MenuI t em2_Cl i ck( ByVal sender As Syst em. Obj ect , ByVal e As
Syst em. Event Ar gs) Handl es MenuI t em2. Cl i ck
Cl ose( )
End Sub
Pr i vat e Sub MenuI t em4_Cl i ck( ByVal sender As Syst em. Obj ect , ByVal e As
Syst em. Event Ar gs) Handl es MenuI t em4. Cl i ck
Di mFr mAs New For m3
Fr m. ShowDi al og( )
End Sub
End Cl ass
Publ i c Cl ass For m3
I nher i t s Syst em. Wi ndows. For ms. For m
#Regi on " Wi ndows For mDesi gner gener at ed code "
Publ i c Sub New( )
MyBase. New( )
' Thi s cal l i s r equi r ed by t he Wi ndows For mDesi gner .
I ni t i al i zeComponent ( )
' Add any i ni t i al i zat i on af t er t he I ni t i al i zeComponent ( ) cal l
End Sub
' For mover r i des di spose t o cl ean up t he component l i st .
Pr ot ect ed Over l oads Over r i des Sub Di spose( ByVal di sposi ng As Bool ean)
I f di sposi ng Then
I f Not ( component s I s Not hi ng) Then
component s. Di spose( )
End I f
End I f
MyBase. Di spose( di sposi ng)
End Sub
' Requi r ed by t he Wi ndows For mDesi gner
Pr i vat e component s As Syst em. Component Model . I Cont ai ner
' NOTE: The f ol l owi ng pr ocedur e i s r equi r ed by t he Wi ndows For mDesi gner
' I t can be modi f i ed usi ng t he Wi ndows For mDesi gner .
' Do not modi f y i t usi ng t he code edi t or .
Fr i end Wi t hEvent s Label 1 As Syst em. Wi ndows. For ms. Label
Fr i end Wi t hEvent s Label 2 As Syst em. Wi ndows. For ms. Label
Fr i end Wi t hEvent s Label 3 As Syst em. Wi ndows. For ms. Label
Fr i end Wi t hEvent s Label 4 As Syst em. Wi ndows. For ms. Label
Fr i end Wi t hEvent s Label 5 As Syst em. Wi ndows. For ms. Label
Fr i end Wi t hEvent s Label 6 As Syst em. Wi ndows. For ms. Label
Fr i end Wi t hEvent s Label 7 As Syst em. Wi ndows. For ms. Label
Fr i end Wi t hEvent s But t on1 As Syst em. Wi ndows. For ms. But t on
<Syst em. Di agnost i cs. Debugger St epThr ough( ) > Pr i vat e Sub
I ni t i al i zeComponent ( )
119
Di mr esour ces As Syst em. Resour ces. Resour ceManager = New
Syst em. Resour ces. Resour ceManager ( Get Type( For m3) )
Me. Label 1 = New Syst em. Wi ndows. For ms. Label
Me. Label 2 = New Syst em. Wi ndows. For ms. Label
Me. Label 3 = New Syst em. Wi ndows. For ms. Label
Me. Label 4 = New Syst em. Wi ndows. For ms. Label
Me. Label 5 = New Syst em. Wi ndows. For ms. Label
Me. Label 6 = New Syst em. Wi ndows. For ms. Label
Me. Label 7 = New Syst em. Wi ndows. For ms. Label
Me. But t on1 = New Syst em. Wi ndows. For ms. But t on
Me. SuspendLayout ( )
'
' Label 1
'
Me. Label 1. Locat i on = New Syst em. Dr awi ng. Poi nt ( 136, 56)
Me. Label 1. Name = " Label 1"
Me. Label 1. Si ze = New Syst em. Dr awi ng. Si ze( 216, 16)
Me. Label 1. TabI ndex = 0
Me. Label 1. Text = " Tr abal ho de Concl uso de Cur so"
'
' Label 2
'
Me. Label 2. Locat i on = New Syst em. Dr awi ng. Poi nt ( 160, 80)
Me. Label 2. Name = " Label 2"
Me. Label 2. Si ze = New Syst em. Dr awi ng. Si ze( 200, 23)
Me. Label 2. TabI ndex = 1
Me. Label 2. Text = " Engenhar i a El et r ni ca"
'
' Label 3
'
Me. Label 3. Locat i on = New Syst em. Dr awi ng. Poi nt ( 136, 32)
Me. Label 3. Name = " Label 3"
Me. Label 3. Si ze = New Syst em. Dr awi ng. Si ze( 200, 23)
Me. Label 3. TabI ndex = 2
Me. Label 3. Text = " Ti r e Pr essur e Moni t or i ng Syst em"
'
' Label 4
'
Me. Label 4. Locat i on = New Syst em. Dr awi ng. Poi nt ( 48, 144)
Me. Label 4. Name = " Label 4"
Me. Label 4. Si ze = New Syst em. Dr awi ng. Si ze( 200, 23)
Me. Label 4. TabI ndex = 3
Me. Label 4. Text = " Aut or : Ander son Br emm"
'
' Label 5
'
Me. Label 5. Locat i on = New Syst em. Dr awi ng. Poi nt ( 48, 192)
Me. Label 5. Name = " Label 5"
Me. Label 5. Si ze = New Syst em. Dr awi ng. Si ze( 200, 23)
Me. Label 5. TabI ndex = 4
Me. Label 5. Text = " Auxi l i o: Raf ael Scopel Ant unes"
'
' Label 6
'
Me. Label 6. Locat i on = New Syst em. Dr awi ng. Poi nt ( 144, 104)
Me. Label 6. Name = " Label 6"
Me. Label 6. Si ze = New Syst em. Dr awi ng. Si ze( 200, 23)
Me. Label 6. TabI ndex = 5
Me. Label 6. Text = " Cent r o Uni ver si t r i o FEEVALE"
'
' Label 7
120
'
Me. Label 7. Locat i on = New Syst em. Dr awi ng. Poi nt ( 48, 168)
Me. Label 7. Name = " Label 7"
Me. Label 7. Si ze = New Syst em. Dr awi ng. Si ze( 200, 23)
Me. Label 7. TabI ndex = 6
Me. Label 7. Text = " Or i ent ador : Pr of . M. Sc. Csar Cr ovat o"
'
' But t on1
'
Me. But t on1. Locat i on = New Syst em. Dr awi ng. Poi nt ( 192, 232)
Me. But t on1. Name = " But t on1"
Me. But t on1. TabI ndex = 7
Me. But t on1. Text = " OK"
'
' For m3
'
Me. Aut oScal eBaseSi ze = New Syst em. Dr awi ng. Si ze( 5, 13)
Me. Cl i ent Si ze = New Syst em. Dr awi ng. Si ze( 456, 292)
Me. Cont r ol s. Add( Me. But t on1)
Me. Cont r ol s. Add( Me. Label 7)
Me. Cont r ol s. Add( Me. Label 6)
Me. Cont r ol s. Add( Me. Label 5)
Me. Cont r ol s. Add( Me. Label 4)
Me. Cont r ol s. Add( Me. Label 3)
Me. Cont r ol s. Add( Me. Label 2)
Me. Cont r ol s. Add( Me. Label 1)
Me. I con = CType( r esour ces. Get Obj ect ( " $t hi s. I con" ) ,
Syst em. Dr awi ng. I con)
Me. Maxi mi zeBox = Fal se
Me. Name = " For m3"
Me. St ar t Posi t i on =
Syst em. Wi ndows. For ms. For mSt ar t Posi t i on. Cent er Scr een
Me. Text = " Sobr e"
Me. TopMost = Tr ue
Me. ResumeLayout ( Fal se)
End Sub
#End Regi on
Pr i vat e Sub But t on1_Cl i ck( ByVal sender As Syst em. Obj ect , ByVal e As
Syst em. Event Ar gs) Handl es But t on1. Cl i ck
Cl ose( )
End Sub
End cl ass
121
APNDICE II: Cdigo fonte do programa do MSP430F1122.
122
////////////////////////////////////////////////////////////////////////////////
// TCC ANDERSON BREMM -- T.P.M.S. //////////////
////////////////////////////////////////////////////////////////////////////////
#include <msp430x11x2.h>
void hwinit( void );
void loop( void );
void amostra_AD();
void LowPM();
void verifica_P2IN();
void verifica_BAT();
void flashled();
void ConfigRFTX();
void EscreveDado(char data);
void EnviaDadoRF();
void delay100us( void );
void delay10ms( void );
void delay750ms( void );
unsigned int ADC[16];
unsigned int PRESSAO;
float CONSTANTE;
unsigned int V_BAT;
unsigned int V_ALIM;
char BATERIA;
char ALIMENT;
char PRESSAO_L;
char PRESSAO_H;
char data;
const unsigned char Masc[8]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
const unsigned char
ConfWTX[18]={0x8E,0x08,0x1C,0x20,0x20,0xBB,0xBB,0xBB,0xBB,0xBB,0xBB,0xBB,0x
BB,0xBB,0xBB,0xA1,0x6F,0x18};
const unsigned char DadosAdress[5]={0xBB,0xBB,0xBB,0xBB,0xBB};
void main (void)
{
hwinit();
ConfigRFTX();
delay10ms();
loop();
}
//////////////////////////////////////////////////////////////////////////////////////
void hwinit( void )
{ WDTCTL = WDTPW | WDTHOLD; // Desativa Watchdog
// Initialize and enable IO ports
P1OUT = 0x00; // Limpa P1
P1DIR = 0xFF; // P1 = sada
123
P2OUT = 0x00; // Limpa P2
P2DIR = 0x08; // P2 = in & out
P2IE = P2IE |(BIT2); // P2.2 interrupt enable
P2IES = P2IES |(BIT2);
// Initialize and enable ADC10
ADC10CTL0 = 0x20F9; // ADC10ON + REF2_5V + REFON +
SREF_1 + ADC10IE
ADC10CTL1 = INCH_15 + SHS_0 + CONSEQ_1; // All AD's + ADC10CLK +
SEQUENCE CHANNEL
ADC10DTC1 = 16; // 16 CONVERSIONS
ADC10SA = (unsigned int)&ADC[0]; // Address AD15
ADC10CTL0 = 0x20FA; // ENC
ADC10AE = ADC10AE |(BIT0); // ENABLE ANALOGIC INPUT
ADC10AE = ADC10AE |(BIT1); // ENABLE ANALOGIC INPUT
// Initialize and enable Timer_A
TACTL = TASSEL1 + MC_1 + TACLR; // ACLK, Clear TAR, Up Mode
TACCTL1 = OUTMOD_2; // Set / Reset
TACCR0 = 0xA; // count from 0 to TACCR0 out=on
TACCR1 = 0x5; // count from 0 to TACCR1 out=off
_EINT();
}
///////////////////////////////////////////////////////////////////////////////
// Amostra ADC10 //////////////////////////////////////////////////////////////
void amostra_AD( void )
{
ADC10SA = (unsigned int)&ADC[0]; //Reset sequence
ADC10CTL0 |= ADC10SC; //re-start sequence
CONSTANTE = 20.46;
PRESSAO = ((ADC[15]- 550)*(2.5)); //Presso recebe AD0
if (PRESSAO >= 1024)
{
PRESSAO=0; //Desconsidera presso menor que 1atm
}
PRESSAO_L=((char)(PRESSAO)); //parte baixa pressao
PRESSAO_H=((char)(PRESSAO>>8)); //parte alta pressao
V_ALIM = (ADC[0]/CONSTANTE); //Presso recebe AD16
V_BAT = (ADC[14]/CONSTANTE); //Presso recebe AD1
BATERIA = ((char)(V_BAT));
ALIMENT = ((char)(V_ALIM));
}
///////////////////////////////////////////////////////////////////////////////
// loop ///////////////////////////////////////////////////////////////////////
void loop( void )
{
for(;;)
{
124
amostra_AD(); //L AD e interrompe!!!!
verifica_BAT();
EnviaDadoRF(); // Envia dado de pressao, vbat, vcc (4 bytes)
int i;
for(i=7;i>=0;i--)
{
delay750ms(); // Repete o ciclo a cada 5 segundos
}
if ((P2IN & 4)==4) //verifica entrada
{
LowPM();
}
}
}
///////////////////////////////////////////////////////////////////////////////
// LOW POWER MODE ////////////////////////////////////////////////////////////////
void LowPM( void )
{
P2OUT = P2OUT &(~BIT3); //desativa carga
flashled();
delay750ms();
flashled();
LPM0; //Modo de baixo consumo 0
}
///////////////////////////////////////////////////////////////////////////////
// BAT Check ////////////////////////////////////////////////////////////////
void verifica_BAT( void )
{
if (V_BAT <= 31)
{
P2OUT = P2OUT |(BIT3); //ativa carga
}
if (V_BAT >= 39)
{
P2OUT = P2OUT &(~BIT3); //desativa carga
}
}
///////////////////////////////////////////////////////////////////////////////
// flash led ////////////////////////////////////////////////////////////////
void flashled( void )
{
P1OUT = P1OUT |(BIT0);
delay10ms(); // Pisca LED
P1OUT = P1OUT &(~BIT0);
delay10ms();
}
///////////////////////////////////////////////////////////////////////////////
// Delay 750ms ////////////////////////////////////////////////////////////////
125
void delay750ms( void )
{
volatile unsigned int i;
i = 20000; // SW Delay
do i--;
while (i != 0);
}
///////////////////////////////////////////////////////////////////////////////
// Delay 100us ////////////////////////////////////////////////////////////////
void delay100us( void )
{
volatile unsigned int i;
i = 5; // SW Delay
do i--;
while (i != 0);
}
///////////////////////////////////////////////////////////////////////////////
// Delay 10ms ////////////////////////////////////////////////////////////////
void delay10ms( void )
{
volatile unsigned int i;
i = 666; // SW Delay
do i--;
while (i != 0);
}
////////////////////////////////////////////////////////////////////////////////
// Rotina que configura o chip para enviar os dados TX /////////////////////////
void ConfigRFTX() //Rotina para a Configurao do Chip
{
int i;
delay10ms();
P1OUT = P1OUT &(~BIT4); //CE=0 porta 1.4
delay10ms();
P1OUT = P1OUT |(BIT3); //CS=1 porta 1.3
delay10ms();
delay100us();
for(i=0;i<=17;i++)
{
EscreveDado(ConfWTX[i]); //Escrever aqui a configurao do chip
(144bits)!!
}
P1OUT = P1OUT &(~BIT3); //CS=0 porta 1.3
delay10ms();
}
///////////////////////////////////////////////////////////////////////////////
/*Rotina que escreve os dados na porta 1.1(DATA) de 8 em 8 bits*//////////////
void EscreveDado(char data)
{
int i;
for(i=7;i>=0;i--)
126
{
P1OUT = P1OUT &(~BIT2); //CLK=0 porta 1.2
if((data&Masc[i])==0)
{
P1OUT = P1OUT &(~BIT1); //Zera a porta 1.1
}
else
{
P1OUT = P1OUT |(BIT1); //Coloca o bit na porta 1.1
}
delay100us();
P1OUT = P1OUT |(BIT2); //CLK=1 porta 1.2
delay100us();
P1OUT = P1OUT &(~BIT2); //CLK=0 porta 1.2
delay100us();
}
}
///////////////////////////////////////////////////////////////////////////////
// Rotina que envia os dados //////////////////////////////////////////////////
void EnviaDadoRF() //Rotina para transmitir dados
{
char i;
delay10ms();
P1OUT = P1OUT &(~BIT3); //CS=0 porta 1.3
delay10ms();
P1OUT = P1OUT |(BIT4); //CE=1 porta 1.4
delay10ms();
delay100us();
for(i=0;i<=4;i++)
{
EscreveDado((char)(DadosAdress[i])); //Escreve o endereo!!
}
EscreveDado(BATERIA); //Escrever os dados!!
EscreveDado(ALIMENT);
EscreveDado(PRESSAO_H);
EscreveDado(PRESSAO_L);
P1OUT = P1OUT &(~BIT4); //Ce=0 porta 1.4
delay10ms();
}
////////////////////////////////////////////////////////////////////////////////
// Interrupo do AD ///////////////////////////////////////////////////////////
#pragma vector = ADC10_VECTOR
__interrupt void ADC10_ISR( void )
{
// LPM0_EXIT;
}
127
// Interrupo da P2 ///////////////////////////////////////////////////////////
#pragma vector = PORT2_VECTOR
__interrupt void P2_ISR( void )
{
P2IFG = P2IFG &(~BIT2);
LPM0_EXIT;
flashled(); // Pisca para sinalizar LPM_exit
}
128
ANEXO
ANEXO A: Datasheet do sensor ICS M50-100A.
129
130
Você também pode gostar
- Aprendendo A Programar em ArduinoDocumento49 páginasAprendendo A Programar em ArduinoLeandro Teixeira100% (2)
- Manual Carregador de Baterias - KMT09Documento16 páginasManual Carregador de Baterias - KMT09Romualdo Cdsp Peças Empilhadeiras100% (1)
- Relatorio Sobre EletroliseDocumento4 páginasRelatorio Sobre EletroliseJose CastroAinda não há avaliações
- Flexymag - 110xxxx-Ne-20-05 Manual de Operação e Serviço.Documento137 páginasFlexymag - 110xxxx-Ne-20-05 Manual de Operação e Serviço.Engenharia ClínicaAinda não há avaliações
- Android Tutorial - by PedroDocumento9 páginasAndroid Tutorial - by PedroBruno YuzoAinda não há avaliações
- Manual Citrino ToolsDocumento114 páginasManual Citrino ToolsValberto AraujoAinda não há avaliações
- Diagramas Elétricos Sistema Fiat VENICEDocumento66 páginasDiagramas Elétricos Sistema Fiat VENICEGuilherme ZoboliAinda não há avaliações
- Equação de Nernst 5Documento14 páginasEquação de Nernst 5joseAinda não há avaliações
- Montagem Da Parte Elétrica Do Gol QuadradoDocumento44 páginasMontagem Da Parte Elétrica Do Gol QuadradoSalatiel Marques100% (1)
- Confecção de Placas de Circuito Impresso ArtesanaisDocumento16 páginasConfecção de Placas de Circuito Impresso ArtesanaisFadul Rodor100% (1)
- YAESU FT-7B Português PDFDocumento19 páginasYAESU FT-7B Português PDFLuiz Carlos Rodrigues100% (3)
- EsterDocumento19 páginasEsterKaio Dos Santos SilvaAinda não há avaliações
- Requisitos de certificação de equipamentos médicosDocumento42 páginasRequisitos de certificação de equipamentos médicoscayo16Ainda não há avaliações
- EsterDocumento19 páginasEsterKaio Dos Santos SilvaAinda não há avaliações
- Ulfc102530 TM Joana MansoDocumento83 páginasUlfc102530 TM Joana Mansocayo16Ainda não há avaliações
- Requisitos de certificação de equipamentos médicosDocumento42 páginasRequisitos de certificação de equipamentos médicoscayo16Ainda não há avaliações
- Ministério Da SaúdeDocumento7 páginasMinistério Da Saúdecayo16Ainda não há avaliações
- Criticidade de EMHDocumento130 páginasCriticidade de EMHcayo16Ainda não há avaliações
- 189676Documento285 páginas189676cayo16Ainda não há avaliações
- Criticidade de EMHDocumento130 páginasCriticidade de EMHcayo16Ainda não há avaliações
- Muda RDC 2015Documento41 páginasMuda RDC 2015Juliana PedraAinda não há avaliações
- Criticidade de EMHDocumento130 páginasCriticidade de EMHcayo16Ainda não há avaliações
- Inmetro Portaria 350Documento24 páginasInmetro Portaria 350José Melcíades BritoAinda não há avaliações
- Manual TV - Manut 17Documento24 páginasManual TV - Manut 17cayo16Ainda não há avaliações
- Memorial DescritivoDocumento10 páginasMemorial Descritivocayo16Ainda não há avaliações
- Gráfico ECV3Documento1 páginaGráfico ECV3cayo16Ainda não há avaliações
- 01 Testes de HipotesesDocumento23 páginas01 Testes de Hipotesescayo16Ainda não há avaliações
- Lista de ComprasDocumento2 páginasLista de Comprascayo16Ainda não há avaliações
- .Ficha 3 Quimica 12 Classe (1) 1601206385000Documento17 páginas.Ficha 3 Quimica 12 Classe (1) 1601206385000Marmun Chivanguire ChivanguireAinda não há avaliações
- 860C 870C L870C Operador (Português) - Ediçao 2.1Documento130 páginas860C 870C L870C Operador (Português) - Ediçao 2.1Gabriely MuriloAinda não há avaliações
- Fundamentos Eletricidade IDocumento3 páginasFundamentos Eletricidade IHenrique MarquesAinda não há avaliações
- Coleção de Projetos Eletrônicos para IniciantesDocumento12 páginasColeção de Projetos Eletrônicos para IniciantesTiago CostaAinda não há avaliações
- VEÍCULOS ELÉTRICOS - TRABALHO - Resgate e Salvanebto IntegradoDocumento22 páginasVEÍCULOS ELÉTRICOS - TRABALHO - Resgate e Salvanebto IntegradoManuel RamosAinda não há avaliações
- Inspiron-15r-N5110 - Service Manual - PT-BRDocumento46 páginasInspiron-15r-N5110 - Service Manual - PT-BRrodrigoAinda não há avaliações
- Pro Iii Evo: Manual (PT)Documento47 páginasPro Iii Evo: Manual (PT)Jef FerreiraAinda não há avaliações
- QUI112 Experimento 05 EletroquimicaDocumento9 páginasQUI112 Experimento 05 EletroquimicaAna Claudia Souza Silva DiasAinda não há avaliações
- BateriasDocumento10 páginasBateriasKelson Vitor CreedAinda não há avaliações
- Apostila Com Todas As Questões Do EnemDocumento121 páginasApostila Com Todas As Questões Do EnemLourenço BotelhoAinda não há avaliações
- Manual No-Break PDFDocumento18 páginasManual No-Break PDFDenis FreireAinda não há avaliações
- Ciências Materiais-ExerciciosDocumento35 páginasCiências Materiais-Exerciciossoaresdm100% (1)
- Microcontrolador Modelix 3.6Documento27 páginasMicrocontrolador Modelix 3.6só hoje provaAinda não há avaliações
- fx20x 78 Dfu BRPDocumento28 páginasfx20x 78 Dfu BRPArauto Do DiscernimentoAinda não há avaliações
- História do desenvolvimento do electromagnetismoDocumento15 páginasHistória do desenvolvimento do electromagnetismoCientista Mundo-gAinda não há avaliações
- Resumo de exercícios de testes/exames de Ciência dos MateriaisDocumento119 páginasResumo de exercícios de testes/exames de Ciência dos MateriaisJoão TomásAinda não há avaliações
- Manual do Usuário No-Break Solution S2Documento45 páginasManual do Usuário No-Break Solution S2PedroAinda não há avaliações
- Pop 101Documento7 páginasPop 101gustavwatsonAinda não há avaliações
- PowerShot SX600HS Camera User Guide PTDocumento162 páginasPowerShot SX600HS Camera User Guide PTFabioGomesAinda não há avaliações
- Manual Eletrificadores Shock 8 LiteDocumento4 páginasManual Eletrificadores Shock 8 LiteIvan CharlesAinda não há avaliações
- BR Safety Information Rev.1.9.5 230407Documento14 páginasBR Safety Information Rev.1.9.5 230407f_mossiniAinda não há avaliações
- Apostila de Ciencias para Nono AnoDocumento50 páginasApostila de Ciencias para Nono Anoalan santosAinda não há avaliações