machine design, Vol.5(2013) No.2, ISSN 1821-1259 pp.
83-86
*Correspondence Authors Address: University of Stip, Faculty of Mechanical Engineering, Krste Misirkov bb, 2000 Stip,
Macedonia, sasko.dimitrov@ugd.edu.mk
Research paper
STATIC AND DYNAMIC CHARACTERISTICS OF DIRECT OPERATED
PRESSURE RELIEF VALVES
Sasko DIMITROV
1, *
- Mihail KOMITOVSKI
2
1
University of Stip, Faculty of Mechanical Engineering, Stip, Macedonia
2
Technical University of Sofia, Faculty of Power Engineering and Power Machines, Sofia, Bulgaria
Received (21.03.2013); Revised (27.05.2013); Accepted (03.06.2013)
Abstract: The static and dynamic characteristics of direct operated pressure relief valve, manufactured by
BoschRexroth are presented in this study. Linear and nonlinear mathematic model of the valve in hydraulic system with
volume of oil at its inlet and pipeline at its outlet are given. The linear model allows determining, with sufficient
approximation, the maximum pressure values and the frequency of oscillations of the transient response.
Key words: static and dynamic characteristics, pressure relief valve, transient response, linear model,
1. INTRODUCTION
Many authors [1], [2], [3], [5] have investigated the static
and dynamic characteristics of direct operated pressure
relief valves. For determination of the pressure peak and
oscillation frequency of the transient response there are
not presented simplified expressions for fast engineering
calculations.
Activating the directional control valves in the hydraulic
systems with direct acting pressure relief valves occurs a
transition process in which it is possible the pressure to
reach values several times higher than the steady state
value. This occurs overload of the system that can cause
undesirable consequences.
Experimental and theoretical investigations of the
transient response in hydraulic systems with this type of
valves are presented. The coefficient of the hydrodynamic
force acting on the poppet to close the valve is obtained
from the experimental static characteristics.
2. A FUNCTIONAL DIAGRAM FOR
DETERMINATION OF THE TRANSIENT
RESPONSE OF THE VALVE
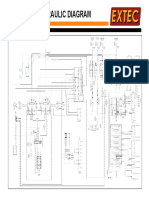
On fig.1 a functional diagram of the test stand with direct
acting pressure relief valve type BoschRexroth, volume of
oil at its inlet V
0
and output pipeline with linear R
p
and
inertial L
p
resistance is shown. To isolate the oil
compressibility between the pump and the valve and for
reducing pressure pulsation after the pump, it is included
a throttle with high inertial resistance.
The design of the poppet of this type of valve is
characterized with turning the streaming flow of the oil
with the ring 1, Fig.2.
This turning of the streaming flow is leading to
decreasing of the component of the hydrodynamic force
F
h
which, together with the spring force F
s
, influence to
close the valve. With this design modification the error in
the static characteristic is decreased. The value of the
hydrodynamic force depends on the diameter and the
shape of the ring 1 of the poppet and it is difficult to
define it. Thus, it is necessary to use the experimental
static characteristics with the displacement of the poppet
of the valve measured, to determine the coefficient of the
hydrodynamic force.
Fig.1. Functional diagram of the test stand
1
F
h
z
F
s
Fig.2. Hydrodynamic force modification
Experimental static characteristics of the specified direct
operated pressure relief valve are presented on fig.3.
Sasko Dimitrov, Mihail Komitovski: Static and Dynamic Characteristics of Direct Operated Pressure Relief Valves;
Machine Design, Vol.5(2013) No.2, ISSN 1821-1259; pp. 83-86
84
Fig.2. Experimental static characteristic
of the specified valve
For a given flow q
0
, a pressure drop
1,2
, a poppet area
and a valve spring constant c and measured pressure
flow constant k
st
of the static characteristic of the valve
and displacement of the poppet
0
of the valve (fig.3), the
coefficient of the hydrodynamic force r
h
is obtain by the
expression [4]:
r
h
=
k
st
q
0
A
k
x
0
-c
p
1,2
(1)
A rapid closure of the opening x
v
of the directional control
valve V1 with plunger diameter d
v
, creates a transient
response. Pump flow q
0
enters in the inlet volume V
0
and
the inlet pressure p
1
is increasing. The valve opens when
the set pressure p
0
is reached and through the outlet
pipeline the oil q
1
flows back in the tank.
3. MATHEMATICAL MODEL
Mathematical model of the system is described by the
following equations:
Equation of continuity in front of the valve
q
0
= q
n
+q
+q
1
(2)
where: q
n
= (1 -
t
t
1
) p
n J
_
2
p
p
1
the flow
through the directional control valve V1, which closes for
time t
1
; t the time;
v
the flow coefficient through the
directional control valve; d
v
-the diameter of the
directional control valve; q
=
v
0
K
dp
1
dt
the flow which
enters in the volume V
0
; q
1
= p n J x sin0_
2
p
p
1,2
the flow through the valve with diameter d, the angle of
flowing , the opening , the pressure drop
1,2
and the
flow coefficient .
Equation of continuity in the valve in front of the
control orifice and after it
q
1
= q
2
= q
3
+A
k
Jx
Jt
(S)
where:
k
-area of the closing element of the valve; q
3
flow through the control orifice in the valve.
Equation of motion of the closing element of the valve
m
J
2
x
Jt
2
+c(b
0
+x) +r
h
xp
1,2
= A
k
(p
3
-p
4
) -F
1
(4)
where: m = m
k
+
1
3
m
]
equivalent mass of the closing
element m
k
and the spring m
f
; stiffness of the spring;
h
0
deformation of the spring when =0 ; r
h
coefficient
of the hydrodynamic force obtaineu by the expiession
(1); F
T
friction force between the closing element and
the body of the valve.
The pressure in the lower region of the closing element of
the valve
3
depends of the losses in the orifice h between
the piston of the closing element and the body of the
valve:
p
3
= p
1
-R
u,I
A
k
Jx
Jt
-R
u,m
(A
k
Jx
Jt
)
2
-I
u
A
k
J
2
x
Jt
2
(S)
Where: R
a,l
, R
a,m
and I
u
= p
I
ndh
are linear, local and
inertial resistances in the orifice with length l.
The pressure in the upper region of the closing element is
obtain analogically when for this type of the valve is
p
4
=p
2.
Equation of flowing in the outlet pipeline
p
2
= R
p,I
q
2
+R
p,m
q
2
2
+I
p
Jq
2
Jt
(6)
Where: R
p,I
, R
p,m
and I
p
respectively linear, local and
inertial resistance of the outlet pipeline with length l
p
and diameter J
p
.
4. EXPERIMENTAL AND THEORETICAL
CHARACTERISTICS
The measurement instruments were previously calibrated.
A pressure transducer manufactured by BoschRexroth
was used for pressure measurement. For displacement of
the valve a position sensor manufactured by
BoschRexroth was used. The data are stored in the
computer through 14 bit data acquisition card
manufactured by National Instruments. The steauy state
flow is 2S lmin.
As can be seen at fig.4, there is good agreement between
experimental and theoretical results. For inlet volume of
oil V
0
=52 cm
3
and the pressure value of
0
=100 bar the
theoretical and the experimental transient response are
little different because of the error in the simulation
process at the beginning when the valve is not still open.
0 2 4 6 8 10 12 14 16 18
0
20
40
60
80
100
120
140
q
o
, l / mi n
p
1
2
,
b
a
r
;
x
o
/
1
0
0
,
m
m
1
1
2
2
p
12
x
o
Sasko Dimitrov, Mihail Komitovski: Static and Dynamic Characteristics of Direct Operated Pressure Relief Valves;
Machine Design, Vol.5(2013) No.2, ISSN 1821-1259; pp. 83-86
85
a)
b)
Fig.4. Experimental and theoretical dynamic
characteristics of the specified valve for different
pressures and volumes at inlet port
5. LINEAR APROXIMATION OF THE
TRANSIEN RESPONSE
The linear approximation of the specified hydraulic
system is shown on fig.5, where the transient process of
the directional control valve V1 is neglected. P
1,2
,
0
,
1
, P
2
and
are Laplace dimensionless parameters
to the relative coordinates pressure drop in the valve
p
1,2
(p
1,2
)
0
, inlet flow
q
0
q
0
, flow through the valve
q
1
q
0
, outlet
pressure
p
2
(p
1,2
)
0
and flow into the compressible volume of
oil at inlet port
q
q
0
.
The transfer function W
k
of the valve, presented in [4], is:
w
k
=
P
1,2
1
= k
pq
I
k
2
s
2
+2
k
I
k
s +1
I
0
2
s
2
+2
0
I
0
s +1
(7)
where k
pq
= 1 is the slope of the dimensionless static
characteristic of the valve around the point of the regime
after the transient process or with flow q
0
and (p
1,2
)
0
;
I
k
= _
m+L
c
A
k
2
c+
h
(p
1,2
)
0
and
k
=
R
c
A
k
2
21
k
|c+
h
(p
1,2
)
0
]
- time
constant and relative damping coefficient of the closing
element of the valve; I
0
=
1
k
1+2k
x,p
and
0
=
{
k
1
k
+k
x,p
1
A
1
k1+2k
x,p
- time constant and relative damping coefficient of the
control system of the valve; k
x,p
=
A
k
(p
1,2
)
0
|c+
h
(p
1,2
)
0
]x
0
and
I
A
=
A
k
x
0
q
0
are respectively opening coefficient of the
valve and time constant; s- Laplace operator.
Fig.5. Block diagram of the linear model
The outlet flow from the valve is flowing through the
pipeline with linear resistance in dimensionless
coordinates R
p
= R
p,I
q
0
(p
1,2
)
0
and inertial resistance
I
p
= I
p,t
q
0
(p
1,2
)
0
:
P
2
= R
p
1
+ I
p
s
1
(8)
The inlet pressure P
1
changes the flow Q
v
, which
enters in the volume V
0
according to the expression:
= I
sP
1
(9)
where I
=
v
0
K
(p
1,2
)
0
q
0
is a time constant of the
compressible volume of oil.
Solving the equations (7), (8) and (9), the transfer
function of the whole system w
0
=
P
1
0
is obtain:
w
0
=
o
1
+o
2
s +o
3
s
2
+o
4
s
3
b
1
+b
2
s +b
3
s
2
+b
4
s
3
+b
5
s
4
(1u)
where the coefficients
1
,
2
,
3
,
4
and b
1
,b
2
,b
3
,b
4
and b
5
are directly obtain from the equations (7), (8) and (9) and
there are presented in the following table:
Table 1:The coefficients of the linear model
o
1
= 1 +R
p
b
1
= 1
o
2
= k
pq
2
k
I
k
+R
p
. 2
0
I
0
+I
p
b
2
= 2
0
I
0
+ k
pq
I
+ R
p
I
o
3
= k
pq
I
k
2
+R
p
I
0
2
+2.
0
I
0
. I
p
b
3
= I
0
2
+ k
pq
2
k
I
k
I
+ R
p
2
0
I
0
I
+ I
p
I
o
4
= I
p
I
0
2
b
4
= k
pq
. I
k
2
. I
+ R
p
. I
0
2
. I
+ 2.
0
I
0
. I
p
. I
b
5
= I
p
I
0
2
I
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
0
20
40
60
80
100
120
t , s
p
1
,
b
a
r
f or Vo = 5 2 c m3
f o r Vo = 4 8 0 c m3
e x p e r i me n t
t h e o r y
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08
0
20
40
60
80
100
120
140
160
180
t , s
p
1
,
b
a
r
f o r Vo = 5 2 c m3
f o r Vo = 4 8 0 c m3
e x p e r i me n t
t h e o r y
Sasko Dimitrov, Mihail Komitovski: Static and Dynamic Characteristics of Direct Operated Pressure Relief Valves;
Machine Design, Vol.5(2013) No.2, ISSN 1821-1259; pp. 83-86
86
The analyses of the zeros and the poles of the transfer
function W
0
shown that it can be approximated if the
values of the coefficients
3
,
4
and b
4
,b
5
are neglected
and the dynamics of the whole system can be
approximately expressed with the following transfer
function:
w
0
=
o
1
+o
2
s
b
1
+b
2
s +b
3
s
2
(11)
The transient response of the pressure p
1
(t) with step
input of the flow from zero to q
0
, obtained from (11), is:
p
1
(t)
p
0
= o
1
_1 -sign
1
A
1 -
2
c
-{o
n
t
. sin [
n
1 -
2
. t +
1
-
2
_ (12)
where
n
=
1
b
3
; =
b
2
2b
3
;
1
= orctg
u
2
o
n
1-{
2
u
1
-u
2
{o
n
;
2
= orctg
1-{
2
-{
; A = o
1
2
-2o
1
o
2
n
+o
2
2
n
2
.
The maximal value of the pressure can be calculated from
(12), as follows:
p
1,mux
p
0
= o
1
_1 -sign
1
A. sin(nn -
2
)
1 -
2
c
-
{(nn-q
1
1-{
2
_ (1S)
Table 2. Comparison of the results
where the coefficient n depends of the sign of the
expression o
1
-o
2
n
: n=0 if
1
<0 and n=1 if
1
>0.
For lower values of the time constant T
v
of the inlet oil
volume V
0
and high resistance R
p
, o
2
n
> o
1
and
respectively sign
1
= -1 and n=0.
In the following table the values of the overload and the
frequency of the oscillation are shown from the
experiments, the theoretical nonlinear model and the
approximated linear model (12).
p
0
=60 bar,
V
0
=52 cm
3
p
0
=60 bar,
V
0
=480 cm
3
p
0
=100 bar,
V
0
=52 cm
3
p
0
=100 bar,
V
0
= 480 cm
3
Experiment
p
1,max
=100 bar
s
=742 rad/s
p
1,max
=85 bar
s
=206 rad/s
p
1,max
=180 bar
s
=709 rad/s
p
1,max
=120 bar
s
=225 rad/s
Non-linear model
p
1,max
=98 bar
s
=778 rad/s
p
1,max
=84 bar
s
=227 rad/s
p
1,max
=140 bar
s
=650 rad/s
p
1,max
=120 bar
s
=217 rad/s
Approximated model
p
1,max
=109 bar
s
=671 rad/s
p
1,max
=90 bar
s
=250 rad/s
p
1,max
=173 bar
s
=775 rad/s
p
1,max
=154 bar
s
=264 rad/s
6. CONCLUSION
The approximated model (12) allows relatively fast
calculation of the maximal pressure of the transient
process. As can be seen, the direct acting pressure relief
valve from BoschRexroth shows a relatively large amount
of dynamic overload of the hydraulic systems. In cases
where this overload cannot be accepted it is advisable to
use pilot operated pressure relief valves.
To assess the dynamics of transient response process with
pressure relief valves it is necessary to know the
displacement x of the poppet of the valve in the static
characteristics, as well.
REFERENCES
[1] Back W.; Murrenhoff H. (1994). Grundlagen der
lhydraulik. Institut fr fluidtechnische Antriebe und
Steuerungen, Technische Hochschule Aachen
[2] Will D.; Strhl H.; Gebhardt N. (1999). Hydraulik,
Springer-Verlag Berlin
[3] Brodowski W. (1974). Beitrag zur Klrung des
stationren und dynamischen Verhaltens
direktwirkender Druckbegrenzungsventile,
Dissertation, Technische Hochschule Aachen
[4] Komitovski M. (1985). Elements of Hydro and
pneumo-drives (in Bulgarien), Technika, Sofia
[5] Komitowski M.; Dimitrov S. (2012). Transient
response process in hydraulic systems with direct
operated pressure relief valves, International
Scientific Conference EMF12, Sozopol
Você também pode gostar
- DownloadDocumento15 páginasDownloadSasko DimitrovAinda não há avaliações
- Simulation of Hydraulic Check Valve For Forestry Equipment: Novak Nedić and Dragan PršićDocumento17 páginasSimulation of Hydraulic Check Valve For Forestry Equipment: Novak Nedić and Dragan PršićSasko DimitrovAinda não há avaliações
- 2011-01-2641 Compensation Force CFD Analysis of Pressure Regulating Valve Applied in FMU of Engine and System ControlsDocumento7 páginas2011-01-2641 Compensation Force CFD Analysis of Pressure Regulating Valve Applied in FMU of Engine and System ControlsSasko DimitrovAinda não há avaliações
- 2-Ijems 16 (1) 7-13Documento7 páginas2-Ijems 16 (1) 7-13Sasko DimitrovAinda não há avaliações
- Numerical and Experimental Investigation On A Conical Poppet Relief Valve With Flow Force CompensationDocumento13 páginasNumerical and Experimental Investigation On A Conical Poppet Relief Valve With Flow Force CompensationSasko DimitrovAinda não há avaliações
- Power Steering EngDocumento56 páginasPower Steering EngSasko DimitrovAinda não há avaliações
- Hydro ug-SIMHYDRAULICS PDFDocumento75 páginasHydro ug-SIMHYDRAULICS PDFSasko DimitrovAinda não há avaliações
- 3D Dynamic Simulation of A Flow Force Compensated Pressure Relief ValveDocumento15 páginas3D Dynamic Simulation of A Flow Force Compensated Pressure Relief ValveSasko DimitrovAinda não há avaliações
- t6dcm t6dcp t6dcmw Denison Vane Pumps MobileDocumento5 páginast6dcm t6dcp t6dcmw Denison Vane Pumps MobileSasko DimitrovAinda não há avaliações
- Man ST-engDocumento28 páginasMan ST-engSasko DimitrovAinda não há avaliações
- 99818Documento60 páginas99818Sasko DimitrovAinda não há avaliações
- C 10 Deutz English Hyd DRG PDFDocumento1 páginaC 10 Deutz English Hyd DRG PDFSasko DimitrovAinda não há avaliações
- 6/2 - Way Directional ValvesDocumento4 páginas6/2 - Way Directional ValvesSasko DimitrovAinda não há avaliações
- CNC LathesDocumento11 páginasCNC LathesSasko DimitrovAinda não há avaliações
- Klad - List - 6-2 Way Direct. ValvesDocumento1 páginaKlad - List - 6-2 Way Direct. ValvesSasko DimitrovAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Chapter 24 - Intro To Turbulence Modeling in CFDDocumento23 páginasChapter 24 - Intro To Turbulence Modeling in CFDprashanthreddyhAinda não há avaliações
- API Versus OSHADocumento6 páginasAPI Versus OSHAGMSAinda não há avaliações
- 14 Bioepuro Engineering Manual PDFDocumento13 páginas14 Bioepuro Engineering Manual PDFanon_59360791100% (1)
- Vendor List - Page 12Documento1 páginaVendor List - Page 12Tanpreet SinghAinda não há avaliações
- 314b PDFDocumento70 páginas314b PDFSiva baalanAinda não há avaliações
- DP143 Installation - Maintenance - ManualDocumento28 páginasDP143 Installation - Maintenance - ManualUdana HettiarachchiAinda não há avaliações
- Hydraulic Control SystemDocumento16 páginasHydraulic Control SystemHeerok Kumar100% (1)
- Fluid Flow 2Documento4 páginasFluid Flow 2Tech TucksAinda não há avaliações
- PSV SizingDocumento8 páginasPSV SizingMinh DoAinda não há avaliações
- Flow in Water PipingDocumento9 páginasFlow in Water PipingJanAinda não há avaliações
- Forged Steel Pipe Fittings (OK)Documento18 páginasForged Steel Pipe Fittings (OK)truongAinda não há avaliações
- Steady Non-Uniform Flow or Varied Flow in Open ChannelsDocumento18 páginasSteady Non-Uniform Flow or Varied Flow in Open ChannelsMerlund Rey ZamoraAinda não há avaliações
- ThaerRoomi WindTunnel PDFDocumento15 páginasThaerRoomi WindTunnel PDFRajAinda não há avaliações
- Final ReportDocumento8 páginasFinal ReportBalaji KartikAinda não há avaliações
- Laminar Drag Reduction: Prof. Keizo WATANABE Tokyo Metropolitan UniversityDocumento73 páginasLaminar Drag Reduction: Prof. Keizo WATANABE Tokyo Metropolitan UniversityVita PuspitaAinda não há avaliações
- Dimensi Pompa DESMIDocumento8 páginasDimensi Pompa DESMIDeddyAinda não há avaliações
- Evaluation of Vertical Kaplan Turbine Using CFD: Conference PaperDocumento11 páginasEvaluation of Vertical Kaplan Turbine Using CFD: Conference PaperSayan KumarAinda não há avaliações
- Design Sanjeev 1Documento18 páginasDesign Sanjeev 1riteshreplyAinda não há avaliações
- Valve SheetDocumento23 páginasValve SheetAris KancilAinda não há avaliações
- Valve Proving SystemDocumento5 páginasValve Proving SystemcemsavantAinda não há avaliações
- CCI Скороc Кинетич Энерг Рабоч Сред Регулир Трим Control Valve Trim Fluid Kinetic Energy Velocity 2007Documento9 páginasCCI Скороc Кинетич Энерг Рабоч Сред Регулир Трим Control Valve Trim Fluid Kinetic Energy Velocity 2007derbyolaAinda não há avaliações
- Behind Pump VibrationsDocumento30 páginasBehind Pump Vibrationsfahrian05Ainda não há avaliações
- Manual - Milton Roy Serie-GDocumento48 páginasManual - Milton Roy Serie-GmauriciojjAinda não há avaliações
- Module 3Documento28 páginasModule 3Carms GameAinda não há avaliações
- Materi 4 - Flow of Fluid Through Fluidised BedsDocumento27 páginasMateri 4 - Flow of Fluid Through Fluidised BedsAndersen YunanAinda não há avaliações
- Gas Dynamics and Jet Propulsion - NewDocumento12 páginasGas Dynamics and Jet Propulsion - NewShanmugam SAinda não há avaliações
- Sluice Gate Module-6Documento4 páginasSluice Gate Module-6hemontoyAinda não há avaliações
- Design and Performance Curve Generation by CFD Analysis of Centrifugal PumpDocumento10 páginasDesign and Performance Curve Generation by CFD Analysis of Centrifugal Pumpبلال بن عميرهAinda não há avaliações
- Surge CalculationsDocumento21 páginasSurge Calculationsger80100% (4)
- 2-1. Structure and FunctionDocumento91 páginas2-1. Structure and Functionmarcelo rojas100% (1)