Você também pode gostar
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- IUFRO PaperDocumento4 páginasIUFRO PaperJosé Felipe De AlmeidaAinda não há avaliações
- Hi Monopole AntennaDocumento4 páginasHi Monopole AntennaJosé Felipe De AlmeidaAinda não há avaliações
- Soil Ionization in Different Types of Groundin Grids Simulated by FDTD MethodDocumento6 páginasSoil Ionization in Different Types of Groundin Grids Simulated by FDTD MethodJosé Felipe De AlmeidaAinda não há avaliações
- Spiral Microstrip AntennaDocumento3 páginasSpiral Microstrip AntennaJosé Felipe De Almeida100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Ridge regression biased estimates nonorthogonal problemsDocumento14 páginasRidge regression biased estimates nonorthogonal problemsGHULAM MURTAZAAinda não há avaliações
- TP5 W9 S9 R0Documento2 páginasTP5 W9 S9 R0DickiEffendy0% (1)
- Product CataloguepityDocumento270 páginasProduct CataloguepityRaghuRags100% (1)
- Textile Pretreatment and Finishing 2023Documento205 páginasTextile Pretreatment and Finishing 2023Aweru gebremariamAinda não há avaliações
- Gerovital anti-aging skin care product guideDocumento10 páginasGerovital anti-aging skin care product guideכרמן גאורגיהAinda não há avaliações
- المحاضرة الرابعة المقرر انظمة اتصالات 2Documento31 páginasالمحاضرة الرابعة المقرر انظمة اتصالات 2ibrahimAinda não há avaliações
- Digital B&W Copiers (D154/D155-NA) Parts CatalogDocumento118 páginasDigital B&W Copiers (D154/D155-NA) Parts Catalogkhoi vuAinda não há avaliações
- Ford 1982 3.8L V6Documento22 páginasFord 1982 3.8L V6sc100% (1)
- Common Herbs and Foods Used As Galactogogues PDFDocumento4 páginasCommon Herbs and Foods Used As Galactogogues PDFHadi El-MaskuryAinda não há avaliações
- Heradesign Brochure 2008Documento72 páginasHeradesign Brochure 2008Surinder SinghAinda não há avaliações
- Blood Group 3Documento29 páginasBlood Group 3Hamirie JoshuaAinda não há avaliações
- Desiderata: by Max EhrmannDocumento6 páginasDesiderata: by Max EhrmannTanay AshwathAinda não há avaliações
- Typhoon Ulysses Philippines Deadly StormDocumento2 páginasTyphoon Ulysses Philippines Deadly Stormjai mansosAinda não há avaliações
- Ebook Drugs and The Neuroscience of Behavior An Introduction To Psychopharmacology 2Nd Edition Prus Test Bank Full Chapter PDFDocumento62 páginasEbook Drugs and The Neuroscience of Behavior An Introduction To Psychopharmacology 2Nd Edition Prus Test Bank Full Chapter PDFeffigiesbuffoonmwve9100% (10)
- Kingspan Spectrum™: Premium Organic Coating SystemDocumento4 páginasKingspan Spectrum™: Premium Organic Coating SystemNikolaAinda não há avaliações
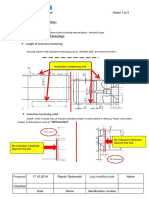
- Induction Hardening - Interpretation of Drawing & Testing PDFDocumento4 páginasInduction Hardening - Interpretation of Drawing & Testing PDFrajesh DESHMUKHAinda não há avaliações
- Kendriya vidyalaya reading comprehension and grammar questionsDocumento7 páginasKendriya vidyalaya reading comprehension and grammar questionsRaam sivaAinda não há avaliações
- EVOLUTION Class Notes PPT-1-10Documento10 páginasEVOLUTION Class Notes PPT-1-10ballb1ritikasharmaAinda não há avaliações
- The Dedication of the Broken Hearted SailorDocumento492 páginasThe Dedication of the Broken Hearted SailorGabriele TorresAinda não há avaliações
- CLIC Catalogue PDFDocumento28 páginasCLIC Catalogue PDFsangram patilAinda não há avaliações
- Cdd153167-Samsung Un32d6500vf Un32 40 46 55d6400uf 6420uf 6450uf 6500vf 6900wf Chassis U63a SM PDFDocumento87 páginasCdd153167-Samsung Un32d6500vf Un32 40 46 55d6400uf 6420uf 6450uf 6500vf 6900wf Chassis U63a SM PDFMilciades MurilloAinda não há avaliações
- Shapes FlashcardsDocumento5 páginasShapes FlashcardsHome Organising by JRAinda não há avaliações
- PepsicoDocumento18 páginasPepsicorahil virani0% (1)
- Orientation Report PDFDocumento13 páginasOrientation Report PDFRiaz RasoolAinda não há avaliações
- L C R Circuit Series and Parallel1Documento6 páginasL C R Circuit Series and Parallel1krishcvrAinda não há avaliações
- Binge-Eating Disorder in AdultsDocumento19 páginasBinge-Eating Disorder in AdultsJaimeErGañanAinda não há avaliações
- Product:: Electronic, 2 C #18 STR TC, PE Ins, OS, PVC JKT, CMDocumento2 páginasProduct:: Electronic, 2 C #18 STR TC, PE Ins, OS, PVC JKT, CMAnonymous XYAPaxjbYAinda não há avaliações
- 35.2 - ING - El Puente NewsletterDocumento13 páginas35.2 - ING - El Puente NewsletterIrmali FrancoAinda não há avaliações
- Elements of Plane and Spherical Trigonometry With Numerous Practical Problems - Horatio N. RobinsonDocumento228 páginasElements of Plane and Spherical Trigonometry With Numerous Practical Problems - Horatio N. RobinsonjorgeAinda não há avaliações
- Etoh Membrane Seperation I&ec - 49-p12067 - 2010 - HuangDocumento7 páginasEtoh Membrane Seperation I&ec - 49-p12067 - 2010 - HuangHITESHAinda não há avaliações