Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Linear Algebra With Applications 9th Edition Leon Solutions ManualDocumento32 páginasLinear Algebra With Applications 9th Edition Leon Solutions ManualLafoot BabuAinda não há avaliações
- GATE 2014 Civil With AnswersDocumento33 páginasGATE 2014 Civil With AnswersJaga NathAinda não há avaliações
- GATE 2020 Online Test Series:: Civil EngineeringDocumento6 páginasGATE 2020 Online Test Series:: Civil EngineeringAvinash JhaAinda não há avaliações
- Notes On Absolutely Continuous Functions of Several VariablesDocumento16 páginasNotes On Absolutely Continuous Functions of Several VariablesSufyanAinda não há avaliações
- Pressure Vessels Lectures 84Documento1 páginaPressure Vessels Lectures 84Adeel NizamiAinda não há avaliações
- s2 TrigonometryDocumento31 páginass2 TrigonometryClaire PadronesAinda não há avaliações
- A Case Study in Ow Assurance of A Pipeline-Riser System Using OLGADocumento10 páginasA Case Study in Ow Assurance of A Pipeline-Riser System Using OLGAAhmed BedhiefAinda não há avaliações
- Final UTS-1 PDFDocumento3 páginasFinal UTS-1 PDFKritika Yadav100% (1)
- Phase Lead and Lag CompensatorDocumento8 páginasPhase Lead and Lag CompensatorNuradeen MagajiAinda não há avaliações
- AEE 23april 430to630pmDocumento26 páginasAEE 23april 430to630pmShikha SoniAinda não há avaliações
- Pub Quantum-Physics PDFDocumento338 páginasPub Quantum-Physics PDFRaj JanaAinda não há avaliações
- The Progress of Consolidation in A Clay Layer Increasing-Gibson PDFDocumento12 páginasThe Progress of Consolidation in A Clay Layer Increasing-Gibson PDFAnonymous GnfGTwAinda não há avaliações
- Math 256 Statistics Spring 2011Documento5 páginasMath 256 Statistics Spring 2011Laksamana NusantaraAinda não há avaliações
- Solving Word Problems Involving Exponential FunctionsDocumento15 páginasSolving Word Problems Involving Exponential FunctionsSherwin Jay Bentazar100% (1)
- Prototyping Approach To Neuro-Fuzzy Speed Control of Trapezoidal Brushless DC MotorDocumento6 páginasPrototyping Approach To Neuro-Fuzzy Speed Control of Trapezoidal Brushless DC MotorJournal of ComputingAinda não há avaliações
- Syllabus Jan09 MAT183Documento2 páginasSyllabus Jan09 MAT183Mike ZakwanAinda não há avaliações
- Cs7593 - Data Structures With Python: Department of Computer Technology Anna University - MIT CampusDocumento37 páginasCs7593 - Data Structures With Python: Department of Computer Technology Anna University - MIT CampusFathima JAinda não há avaliações
- Chapter 11Documento12 páginasChapter 11JeromeAinda não há avaliações
- AEPSHEP2012Documento300 páginasAEPSHEP2012Vitaly VorobyevAinda não há avaliações
- PyBaMM PaperDocumento9 páginasPyBaMM PapervishnuAinda não há avaliações
- Trig BookDocumento174 páginasTrig BookJosé Maurício FreireAinda não há avaliações
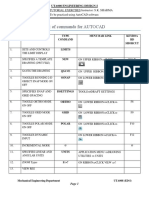
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocumento15 páginasList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelAinda não há avaliações
- Graph Homomorphisms: Open Problems: L Aszl o Lov Asz June 2008Documento10 páginasGraph Homomorphisms: Open Problems: L Aszl o Lov Asz June 2008vanaj123Ainda não há avaliações
- 8 The Chinese Postman ProblemDocumento5 páginas8 The Chinese Postman ProblemWantei Kupar WarjriAinda não há avaliações
- Phet Alpha DecayDocumento2 páginasPhet Alpha DecayAndika Sanjaya100% (1)
- Data Structures and Algorithms in Java 6th Edition 201 270Documento70 páginasData Structures and Algorithms in Java 6th Edition 201 270longle18704Ainda não há avaliações
- Chap 6 Hydrograph 1415-IDocumento122 páginasChap 6 Hydrograph 1415-IkakmanAinda não há avaliações
- Chap 1 A - PropositionsDocumento44 páginasChap 1 A - Propositionsعمار الدلال100% (1)
- PPRF Complete Research Report PDFDocumento53 páginasPPRF Complete Research Report PDFGuillermo Bautista FuerteAinda não há avaliações
- 34ee79a9746d853ef9fa1f44acc55afeDocumento51 páginas34ee79a9746d853ef9fa1f44acc55afeSai Pavan MarojuAinda não há avaliações