Você também pode gostar
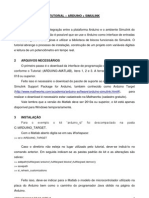
- Tutorial - Arduino + SimulinkDocumento9 páginasTutorial - Arduino + SimulinkArthur Schuler da IgrejaAinda não há avaliações
- Simulador em Tempo Real para Motor Síncrono Com ÍmãDocumento10 páginasSimulador em Tempo Real para Motor Síncrono Com ÍmãIan SilveiraAinda não há avaliações
- Tutoriais de Controle para MATLAB e Simulink - Posição Do Motor - Design Do Controlador PIDDocumento9 páginasTutoriais de Controle para MATLAB e Simulink - Posição Do Motor - Design Do Controlador PIDJuliana VianaAinda não há avaliações
- Controle adaptativo antena parabólicaDocumento53 páginasControle adaptativo antena parabólicaFrancys Tadeu RibeiroAinda não há avaliações
- Controle de Temperatura PID e PWMDocumento25 páginasControle de Temperatura PID e PWMGaspar Ramos50% (2)
- Artigo Emulador PV Cba-2018 FinalDocumento9 páginasArtigo Emulador PV Cba-2018 FinalAdjeferson Custódio GomesAinda não há avaliações
- Relatorio EstagioDocumento10 páginasRelatorio EstagiojesusedsonAinda não há avaliações
- Regulação de tensão de gerador síncrono usando linearização por realimentação de estadosDocumento61 páginasRegulação de tensão de gerador síncrono usando linearização por realimentação de estadosLueden ClaresAinda não há avaliações
- 0 Comparação Técnicas MPPT - Moacyr A. G de BritoDocumento9 páginas0 Comparação Técnicas MPPT - Moacyr A. G de BritoGleison SilvaAinda não há avaliações
- Projeto e Implementação de Um Conversor BuckDocumento109 páginasProjeto e Implementação de Um Conversor BuckTiago SantosAinda não há avaliações
- Conversores Buck e BoostDocumento21 páginasConversores Buck e BoostJessica Silva100% (1)
- Interpretando A Placa de Identificação Dos Motores de InduçãoDocumento50 páginasInterpretando A Placa de Identificação Dos Motores de InduçãoLeandro Terra de Freitas0% (1)
- 03-Manual de ExperimentosDocumento203 páginas03-Manual de ExperimentosAmaro Da Silva Lopes JúniorAinda não há avaliações
- Planejamento de sistemas de energia elétricaDocumento131 páginasPlanejamento de sistemas de energia elétricaEduardo PereiraAinda não há avaliações
- Eletrônica Potência - Simulação PWMDocumento5 páginasEletrônica Potência - Simulação PWMjpaiwaAinda não há avaliações
- Iot Para Medir Ph Com Esp32 Programado Em ArduinoNo EverandIot Para Medir Ph Com Esp32 Programado Em ArduinoAinda não há avaliações
- Manual ScadaBRDocumento239 páginasManual ScadaBRLucasRafaelAinda não há avaliações
- Análise Comparativa de Desempenho de Inversor String e MicroinversorDocumento83 páginasAnálise Comparativa de Desempenho de Inversor String e MicroinversorANDRE ALBUQUERQUEAinda não há avaliações
- Projetos Em Clp Ladder Baseado No Twidosuite Parte ViNo EverandProjetos Em Clp Ladder Baseado No Twidosuite Parte ViAinda não há avaliações
- Automação Com Esp32 E Android Programado No Arduino E App InventorNo EverandAutomação Com Esp32 E Android Programado No Arduino E App InventorAinda não há avaliações
- Modelo Da Máquina De Indução E Geração DistribuídaNo EverandModelo Da Máquina De Indução E Geração DistribuídaAinda não há avaliações
- Apostila Assembly MIPS Christiane PDFDocumento51 páginasApostila Assembly MIPS Christiane PDFmichael_dougras1325450% (2)
- Rtos Para Medição De Amperímetro Programado No ArduinoNo EverandRtos Para Medição De Amperímetro Programado No ArduinoAinda não há avaliações
- Tutorial Kicad 5.1.5 - Revisada 27 - 07 - 2020Documento49 páginasTutorial Kicad 5.1.5 - Revisada 27 - 07 - 2020Paulo VieiraAinda não há avaliações
- Guia de EstudosDocumento59 páginasGuia de EstudosmoreiraviniciAinda não há avaliações
- Projeto Sistemas de ControleDocumento14 páginasProjeto Sistemas de ControleBRYAN DA SILVA SOUZAAinda não há avaliações
- Desenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandDesenvolvendo Projetos De Monitoramento No Thinger.io Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Controle PID Luminosidade ArduinoDocumento17 páginasControle PID Luminosidade ArduinoDinoPoloAinda não há avaliações
- Pid ArduinoDocumento37 páginasPid ArduinoIago Henrique100% (1)
- Aula 7 - FaltasDocumento9 páginasAula 7 - Faltaspriscila_sportAinda não há avaliações
- Projeto de Um Controlador PID para o Controle de Luminosidade de Faróis de Um VeículoDocumento6 páginasProjeto de Um Controlador PID para o Controle de Luminosidade de Faróis de Um VeículoNetto Lopes100% (1)
- Aplicações Eletrônicas Na Raspberry Pi 3 Programado Em Visual C# Para Windows 10 Iot CoreNo EverandAplicações Eletrônicas Na Raspberry Pi 3 Programado Em Visual C# Para Windows 10 Iot CoreAinda não há avaliações
- Aplicando Iot Para Medir Um Voltímetro Com Esp8266 (nodemcu) Programado Em ArduinoNo EverandAplicando Iot Para Medir Um Voltímetro Com Esp8266 (nodemcu) Programado Em ArduinoAinda não há avaliações
- Programação Em C E Assembly Para A Família Mc68hc908No EverandProgramação Em C E Assembly Para A Família Mc68hc908Ainda não há avaliações
- Prática 01 - Capacitor em CC e CADocumento2 páginasPrática 01 - Capacitor em CC e CAGilmar MatheusAinda não há avaliações
- Introdução À Engenharia ElétricaDocumento15 páginasIntrodução À Engenharia ElétricaelderufsjAinda não há avaliações
- Apostila de Linguagem de Programação I e Estrutura de Dados PDFDocumento66 páginasApostila de Linguagem de Programação I e Estrutura de Dados PDFMatheus Barreto OliveiraAinda não há avaliações
- Resumo Livro Projeto, Simulações e Experiências de Laboratório em Sistemas de ControleDocumento9 páginasResumo Livro Projeto, Simulações e Experiências de Laboratório em Sistemas de ControleRafaella B. C. RafaAinda não há avaliações
- Scadabr ConteudoDocumento87 páginasScadabr ConteudoJuliana Szekir Berger100% (1)
- Apostila F28377S Volume 2: FPU, TMU, VCU e CLADocumento35 páginasApostila F28377S Volume 2: FPU, TMU, VCU e CLAGabriel LucasAinda não há avaliações
- SPI-Flash Programmer ManualDocumento4 páginasSPI-Flash Programmer ManualAlbert NewtonAinda não há avaliações
- Desenvolvendo Uma Lombada Eletrônica Para Apresentar A Velocidade Com ArduinoNo EverandDesenvolvendo Uma Lombada Eletrônica Para Apresentar A Velocidade Com ArduinoAinda não há avaliações
- Antologia De Projetos No Arduino Com Display Lcd Volume VNo EverandAntologia De Projetos No Arduino Com Display Lcd Volume VAinda não há avaliações
- Conversor Boost InterleavedDocumento8 páginasConversor Boost InterleavedThiago Carvalho RêgoAinda não há avaliações
- Exercícios Portas LógicasDocumento3 páginasExercícios Portas LógicasGustavo Fabro de AzevedoAinda não há avaliações
- NTC - 903100 - Fornecimento em Tensão Primaria de DistribuiçãoDocumento121 páginasNTC - 903100 - Fornecimento em Tensão Primaria de DistribuiçãoIgor Andrey WurrAinda não há avaliações
- Relatorio OsciloscopioDocumento1 páginaRelatorio OsciloscopioemanuelAinda não há avaliações
- Divisor de Tensão Com CargaDocumento8 páginasDivisor de Tensão Com CargaChellton AlmeidaAinda não há avaliações
- Conceitos Basicos Sobre Capacitores e IndutoresDocumento6 páginasConceitos Basicos Sobre Capacitores e IndutoresJeffer Vivendo A VidaAinda não há avaliações
- Guia do Usuário Placa McLab3Documento23 páginasGuia do Usuário Placa McLab3Higor MadureiraAinda não há avaliações
- Apostila MICRODocumento62 páginasApostila MICROjoaopedro2225Ainda não há avaliações
- Cogeração PDFDocumento25 páginasCogeração PDFVinicios FerrazAinda não há avaliações
- 08 - Gestão Preventiva de EquipamentosDocumento30 páginas08 - Gestão Preventiva de EquipamentosVinicios FerrazAinda não há avaliações
- FILLIPE SOARES Operacao Termica DisponibilidadeDocumento211 páginasFILLIPE SOARES Operacao Termica DisponibilidadeVinicios FerrazAinda não há avaliações
- Curso de MSDOS 6 - 22Documento28 páginasCurso de MSDOS 6 - 22Vinicios FerrazAinda não há avaliações
- NBR 13571 - 1996 - Haste de ToDocumento11 páginasNBR 13571 - 1996 - Haste de ToBruno Luiz CyprianoAinda não há avaliações
- Informativo - 13 Padrao de Respostas EspecificasDocumento10 páginasInformativo - 13 Padrao de Respostas EspecificasVinicios FerrazAinda não há avaliações
- Guia de Consulta Do WCMDocumento160 páginasGuia de Consulta Do WCMVinicios Ferraz83% (12)
- Tabela de Acentuaçção Gráfica - Novo Acordo OrtográficoDocumento5 páginasTabela de Acentuaçção Gráfica - Novo Acordo OrtográficosiepaAinda não há avaliações
- Resolução Termodinâmica - Mário José de Oliveira (Cap. 1-8) PDFDocumento42 páginasResolução Termodinâmica - Mário José de Oliveira (Cap. 1-8) PDFLeandro Rafael86% (14)
- 05 - Manutenção ProfissionalDocumento26 páginas05 - Manutenção ProfissionalVinicios FerrazAinda não há avaliações
- Tarefa 4 - Grupo CDocumento31 páginasTarefa 4 - Grupo CVinicios FerrazAinda não há avaliações
- Abnt NBR 5426-1985Documento63 páginasAbnt NBR 5426-1985Everaldo Leme100% (3)
- 08 - Gestão Preventiva de EquipamentosDocumento30 páginas08 - Gestão Preventiva de EquipamentosVinicios FerrazAinda não há avaliações
- Segurança em EletricidadeDocumento5 páginasSegurança em EletricidadeVinicios FerrazAinda não há avaliações
- Quality Control FundamentalsDocumento30 páginasQuality Control FundamentalsVinicios FerrazAinda não há avaliações
- Quality Control FundamentalsDocumento30 páginasQuality Control FundamentalsVinicios FerrazAinda não há avaliações
- Focused Improvement: instrumentos e técnicas para reduzir perdasDocumento34 páginasFocused Improvement: instrumentos e técnicas para reduzir perdasAngleysonDiego100% (1)
- 07 - Logística PDFDocumento42 páginas07 - Logística PDFVinicios FerrazAinda não há avaliações
- Guia de Consulta Do WCMDocumento160 páginasGuia de Consulta Do WCMVinicios Ferraz83% (12)
- 05 - Ferramenta 5T StandardDocumento7 páginas05 - Ferramenta 5T StandardVinicios FerrazAinda não há avaliações
- 10 - AmbientalDocumento32 páginas10 - AmbientalVinicios FerrazAinda não há avaliações
- 09 - Desenvolvimento de PessoasDocumento16 páginas09 - Desenvolvimento de PessoasVinicios FerrazAinda não há avaliações
- 07 - Logística PDFDocumento42 páginas07 - Logística PDFVinicios FerrazAinda não há avaliações
- 04 - Manutenção AutônomaDocumento22 páginas04 - Manutenção Autônomaluciano2012Ainda não há avaliações
- Apostila Processos de UsinagemDocumento99 páginasApostila Processos de Usinagemluiz_priAinda não há avaliações
- 5W1H para análise de problema com lâmpada queimando no OHPDocumento9 páginas5W1H para análise de problema com lâmpada queimando no OHPVinicios FerrazAinda não há avaliações
- UsinagemDocumento74 páginasUsinagemAshley DeanAinda não há avaliações
- Aquisição de Dados DadosDocumento29 páginasAquisição de Dados DadosVinicios FerrazAinda não há avaliações
- Apostila Senai Processos Mecc3a2nicos de UsinagemDocumento96 páginasApostila Senai Processos Mecc3a2nicos de UsinagemLuiz Vagner Loureiro100% (2)
- Torção de barras circularesDocumento12 páginasTorção de barras circularesbrunoab89Ainda não há avaliações
- Montagem de EstruturasDocumento42 páginasMontagem de EstruturasVitim Ferreira100% (2)
- Estrutura de Atendimento Hospital Anchieta - Grupo KoraDocumento7 páginasEstrutura de Atendimento Hospital Anchieta - Grupo KoraRenata RezendeAinda não há avaliações
- Do 100+Dicas+Fatais+de+CIVIL-desbloqueadoDocumento27 páginasDo 100+Dicas+Fatais+de+CIVIL-desbloqueadoLayaneAinda não há avaliações
- Manual Operacional APAC V 1 1Documento23 páginasManual Operacional APAC V 1 1Igor PitangaAinda não há avaliações
- Anexo Ii Vagas Bancas e BibliografiasDocumento16 páginasAnexo Ii Vagas Bancas e BibliografiasAquele MesmoAinda não há avaliações
- Riscos GeológicosDocumento39 páginasRiscos Geológicosjonas.engenharia2912100% (1)
- Manual Tecnico de Instalacao Pro 4.43 BDocumento2 páginasManual Tecnico de Instalacao Pro 4.43 BAllan GuedesAinda não há avaliações
- Auditoria ambiental em refinarias de petróleoDocumento9 páginasAuditoria ambiental em refinarias de petróleolarissaAinda não há avaliações
- A vida na sociedade da vigilância e a proteção de dadosDocumento14 páginasA vida na sociedade da vigilância e a proteção de dadosg_riva0% (2)
- Programador Delphi SêniorDocumento3 páginasProgramador Delphi SêniorDaniel Mirrai100% (1)
- Catalogo Linha Relés de Disparo (Esp-Port)Documento24 páginasCatalogo Linha Relés de Disparo (Esp-Port)Alexandre MorenoAinda não há avaliações
- Código para jogos digitaisDocumento3 páginasCódigo para jogos digitaisMARIA ADELIA ICO DOS SANTOSAinda não há avaliações
- Caso fortuito ou força maior no direito brasileiroDocumento11 páginasCaso fortuito ou força maior no direito brasileiroBruno CruzAinda não há avaliações
- Dissertacao MariaJoaoOliveiraDocumento75 páginasDissertacao MariaJoaoOliveiraMalvar91Ainda não há avaliações
- Jogos digitais: elementos e designDocumento19 páginasJogos digitais: elementos e designSorryMyBadAinda não há avaliações
- Takaoka MicrotakDocumento51 páginasTakaoka MicrotakEng. Edelson Martins100% (1)
- Direito Tributário e Comercial em Concurso PúblicoDocumento40 páginasDireito Tributário e Comercial em Concurso PúblicoraphajonesAinda não há avaliações
- 19 Curiosidades Sobre o GoogleDocumento7 páginas19 Curiosidades Sobre o GooglePereiraAinda não há avaliações
- Direito Administrativo Angolano: Normas de Procedimento e Atividade AdministrativaDocumento18 páginasDireito Administrativo Angolano: Normas de Procedimento e Atividade Administrativaaercio_manuelAinda não há avaliações
- SlidesDocumento24 páginasSlidesFernando KaioAinda não há avaliações
- Educação financeira nas escolas - Bloco 2Documento28 páginasEducação financeira nas escolas - Bloco 2RenatoAinda não há avaliações
- Vidro EstrturalDocumento8 páginasVidro Estrturalmjc1980Ainda não há avaliações
- Guia definitivo sobre sistemas de ancoragem predialDocumento19 páginasGuia definitivo sobre sistemas de ancoragem predialGlaysson cotta100% (1)
- 05 Projeto Basico de Cultivo Hidroponico PDFDocumento4 páginas05 Projeto Basico de Cultivo Hidroponico PDFGiovane Vaz100% (3)
- Pré-instalação de Raio-X e DRDocumento10 páginasPré-instalação de Raio-X e DRRafael BorbaAinda não há avaliações
- Instruçoes Simulado 2021Documento6 páginasInstruçoes Simulado 2021Laura Belice WeilerAinda não há avaliações
- Gestão empresarial e contabilidade financeiraDocumento9 páginasGestão empresarial e contabilidade financeiraAna Carolina SantosAinda não há avaliações
- Captura de Tela 2022-12-28 À(s) 15.44.25Documento4 páginasCaptura de Tela 2022-12-28 À(s) 15.44.25Fernando PontesAinda não há avaliações
- Aula 2Documento2 páginasAula 2Salete EisenAinda não há avaliações
- Panfleto Acess+ Rios Com M.ODocumento36 páginasPanfleto Acess+ Rios Com M.ONilson BarbosaAinda não há avaliações