Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
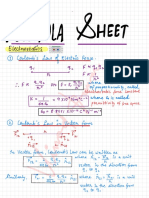
- ELECTGROMAGNETIC SPECTRUM-RW TRANSMISSION & RECEPTION (Autosaved)Documento17 páginasELECTGROMAGNETIC SPECTRUM-RW TRANSMISSION & RECEPTION (Autosaved)Melai Rodriguez Ibardaloza73% (11)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Disklavier Mark III Full-Function Models GP, UP (A)Documento83 páginasDisklavier Mark III Full-Function Models GP, UP (A)Dr. Emmett Lathrop "Doc" Brown100% (1)
- Electrical Equipment Check ListDocumento3 páginasElectrical Equipment Check ListRania Saied100% (2)
- Codes MWMDocumento5 páginasCodes MWMManuel Jesus Barrera Ayala100% (1)
- DX100Documento16 páginasDX100sahanagopalAinda não há avaliações
- MCP3421 DatasheetDocumento42 páginasMCP3421 DatasheetgblackweAinda não há avaliações
- Technical Service For Brush Transformers and OltcsDocumento2 páginasTechnical Service For Brush Transformers and OltcsMOHAMAD ABDELRAHMANAinda não há avaliações
- DC Machine61 74Documento3 páginasDC Machine61 74Charina PinlacAinda não há avaliações
- Model 422E53 IN-Line Charge Converter Installation and Operating ManualDocumento10 páginasModel 422E53 IN-Line Charge Converter Installation and Operating Manualsinner86Ainda não há avaliações
- Marechal DSN Plugs & Sockets Industrial Power Supply & Motor Connections (20 63A)Documento8 páginasMarechal DSN Plugs & Sockets Industrial Power Supply & Motor Connections (20 63A)rocketvtAinda não há avaliações
- Esr MeterDocumento1 páginaEsr MeterDt125 Farm Adv.Ainda não há avaliações
- LAB 1-PE-LabDocumento10 páginasLAB 1-PE-LabLovely JuttAinda não há avaliações
- Dstar Ehandbook v5.0Documento381 páginasDstar Ehandbook v5.0RobertoAinda não há avaliações
- PRINT - Service Manuals - Service Manual MC Kinley Eu GD 13 06 2019Documento73 páginasPRINT - Service Manuals - Service Manual MC Kinley Eu GD 13 06 2019Sebastian PettersAinda não há avaliações
- Alarmas Audible 302XDocumento2 páginasAlarmas Audible 302XLogan Marquez AguayoAinda não há avaliações
- Arduino Ir SensorDocumento4 páginasArduino Ir SensorBatthula Phanindra KumarAinda não há avaliações
- Schmersal Safety ControllersDocumento204 páginasSchmersal Safety Controllerssaul H QAinda não há avaliações
- BRO BuildingAutomation PDFDocumento28 páginasBRO BuildingAutomation PDFEhsaanAhmedAinda não há avaliações
- Ee410 Final Design ProjectDocumento4 páginasEe410 Final Design Projectapi-294954225Ainda não há avaliações
- Ch6 Mosfets HSD - LSD Part 1Documento77 páginasCh6 Mosfets HSD - LSD Part 1sathyaeeeAinda não há avaliações
- Guia RisoDocumento184 páginasGuia RisoToni PonsAinda não há avaliações
- Jeddah Cable Cu Xlpe-PvcDocumento2 páginasJeddah Cable Cu Xlpe-PvcSoltani AliAinda não há avaliações
- Medium Voltage SMC OEM Components - 10 15 KV Specifications: Technical DataDocumento16 páginasMedium Voltage SMC OEM Components - 10 15 KV Specifications: Technical Dataahmed essamAinda não há avaliações
- JASD Series AC Servo Drives Users ManualDocumento130 páginasJASD Series AC Servo Drives Users ManualsamadAinda não há avaliações
- Std5Nm50 Std5Nm50-1: N-Channel 500V - 0.7 - 7.5A Dpak/Ipak Mdmesh™Power MosfetDocumento11 páginasStd5Nm50 Std5Nm50-1: N-Channel 500V - 0.7 - 7.5A Dpak/Ipak Mdmesh™Power MosfetSaikumarAinda não há avaliações
- Which Microcontroller Consumes The Lowest Power ConsumptionDocumento6 páginasWhich Microcontroller Consumes The Lowest Power Consumptiongk.mobm33Ainda não há avaliações
- Harmonic Current Emission of Wind Farms Exceeding The Limiting ValuesDocumento3 páginasHarmonic Current Emission of Wind Farms Exceeding The Limiting ValuesgusutnarAinda não há avaliações
- FWC 155Documento43 páginasFWC 155Brandon MendozaAinda não há avaliações
- Untitled NotebookDocumento34 páginasUntitled NotebookKhushiAinda não há avaliações
- Seville Classic Tower Fan 2011 - Instruction Sheet (31!08!2011)Documento6 páginasSeville Classic Tower Fan 2011 - Instruction Sheet (31!08!2011)scribe2000Ainda não há avaliações