Você também pode gostar
- ABCD-FL-57-00 - Wing Load Calculation - v1 08.03.16Documento42 páginasABCD-FL-57-00 - Wing Load Calculation - v1 08.03.16Anonymous SP0wQIZAinda não há avaliações
- Aalco Metals LTD Aluminium Alloy 1050A H14 Sheet 57Documento2 páginasAalco Metals LTD Aluminium Alloy 1050A H14 Sheet 57SathishbhaskarAinda não há avaliações
- Sap2000 Steady State EjemploDocumento14 páginasSap2000 Steady State EjemploCESAR CANEOAinda não há avaliações
- Sap2000 Steady State EjemploDocumento14 páginasSap2000 Steady State EjemploCESAR CANEOAinda não há avaliações
- Lycoming PlugsDocumento5 páginasLycoming PlugsrapidshotAinda não há avaliações
- Static Thrust For PropellerDocumento9 páginasStatic Thrust For PropellerDr.S.RamamurthyAinda não há avaliações
- Checklist Bellanca Citabria 7gcbcDocumento2 páginasChecklist Bellanca Citabria 7gcbcrapidshot100% (2)
- Instrument Flying: Attitude Plus Power Equals PerformanceDocumento12 páginasInstrument Flying: Attitude Plus Power Equals Performancemrtunay2736Ainda não há avaliações
- ζ z z z x iy µ x iy: Joukowski AirfoilsDocumento4 páginasζ z z z x iy µ x iy: Joukowski AirfoilsrapidshotAinda não há avaliações
- General Aviation Pilot's Guide To Preflight Weather Planning, Weather Self-Briefings, and Weather Decision MakingDocumento37 páginasGeneral Aviation Pilot's Guide To Preflight Weather Planning, Weather Self-Briefings, and Weather Decision MakingzzudhirAinda não há avaliações
- ζ z z z x iy µ x iy: Joukowski AirfoilsDocumento4 páginasζ z z z x iy µ x iy: Joukowski AirfoilsrapidshotAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- SampleDocumento2 páginasSamplesaurabhverma08Ainda não há avaliações
- Foaming of Friction Stir Processed Al /mgco3 Precursor Via Ame HeatingDocumento27 páginasFoaming of Friction Stir Processed Al /mgco3 Precursor Via Ame HeatingArshad SiddiqueeAinda não há avaliações
- Types of Processors and RAM'sDocumento26 páginasTypes of Processors and RAM'sSneha NairAinda não há avaliações
- Bhanu Brose Excursion ReportDocumento6 páginasBhanu Brose Excursion ReportBhanu Pratap SinghAinda não há avaliações
- STK412 150 Sanyo PDFDocumento4 páginasSTK412 150 Sanyo PDFroger.Ainda não há avaliações
- Tay Township User Fees and Service Charges BylawDocumento27 páginasTay Township User Fees and Service Charges BylawMidland_MirrorAinda não há avaliações
- Didsn1811a (Skyair R-410a)Documento12 páginasDidsn1811a (Skyair R-410a)Ari SetyawanAinda não há avaliações
- PDS HEMPATEX ENAMEL 56360 en-GB PDFDocumento2 páginasPDS HEMPATEX ENAMEL 56360 en-GB PDFMohamed ChelfatAinda não há avaliações
- Magnetic Separation PDFDocumento12 páginasMagnetic Separation PDFmitzoskyAinda não há avaliações
- Pt. Hans Jaya Utama: Lsagi FactoryDocumento46 páginasPt. Hans Jaya Utama: Lsagi FactoryMatthew SiagianAinda não há avaliações
- Dynamic Arrays With The Arraylist Class Chapter Xii TopicsDocumento38 páginasDynamic Arrays With The Arraylist Class Chapter Xii TopicsRocket FireAinda não há avaliações
- Formulation of Immediate Release Dosage Form of Ranitidine HCL Tabletsusing HPMC and Starch Acetate Film FormerDocumento11 páginasFormulation of Immediate Release Dosage Form of Ranitidine HCL Tabletsusing HPMC and Starch Acetate Film Formersunaina agarwalAinda não há avaliações
- PR 1-2Documento7 páginasPR 1-2mech bhabhaAinda não há avaliações
- Honcha QT6 16 PDFDocumento7 páginasHoncha QT6 16 PDFSuhendra Amka PutraAinda não há avaliações
- EBS Data MaskingDocumento31 páginasEBS Data MaskingNawab ShariefAinda não há avaliações
- CRX Seat Diassembly & Assembly 1Documento9 páginasCRX Seat Diassembly & Assembly 1ocdank19806116Ainda não há avaliações
- A Practical Guide To Understanding Bearing Damage Related To PWM Drives - CNFDocumento7 páginasA Practical Guide To Understanding Bearing Damage Related To PWM Drives - CNFjoe4709Ainda não há avaliações
- Environmental AuditDocumento22 páginasEnvironmental AuditungkumariamAinda não há avaliações
- Propeller Stockpile Measurement and Reports With Drone Surveying EbookDocumento17 páginasPropeller Stockpile Measurement and Reports With Drone Surveying EbookmuazeemK100% (1)
- Sigma Marine Coatings Manual - Part44Documento2 páginasSigma Marine Coatings Manual - Part44EngTamerAinda não há avaliações
- BS en 50483 6 2009Documento27 páginasBS en 50483 6 2009Shara LogisticAinda não há avaliações
- Analysis Procedure K2co3 PDFDocumento3 páginasAnalysis Procedure K2co3 PDFPiyush PatelAinda não há avaliações
- Chapter 1 Introduction To Green BuildingsDocumento19 páginasChapter 1 Introduction To Green BuildingsSunil BeheraAinda não há avaliações
- Symbolic TBDocumento512 páginasSymbolic TBJanet LeongAinda não há avaliações
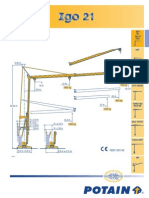
- Potain Igo 21 PDFDocumento4 páginasPotain Igo 21 PDFMarco CruzAinda não há avaliações
- Astm D3212.380331 1Documento3 páginasAstm D3212.380331 1anish_am2005Ainda não há avaliações
- Contra Dam, SwissDocumento31 páginasContra Dam, SwissSudheekar ReddyAinda não há avaliações
- AIP Puducherry Aerodrome, IndiaDocumento13 páginasAIP Puducherry Aerodrome, Indiass khadriAinda não há avaliações
- ACI 517-2R-87 Standard Specification For Tolerances For Accelerated Curing at Atmospheric PressureDocumento17 páginasACI 517-2R-87 Standard Specification For Tolerances For Accelerated Curing at Atmospheric PressureKiramat ShahAinda não há avaliações
- CV Mayank Shekhar Dwivedi IITBDocumento4 páginasCV Mayank Shekhar Dwivedi IITBGoutam GiriAinda não há avaliações