Você também pode gostar
- Ics2307 Simulation and ModellingDocumento79 páginasIcs2307 Simulation and ModellingOloo PunditAinda não há avaliações
- Deep Neural Network ASICs The Ultimate Step-By-Step GuideNo EverandDeep Neural Network ASICs The Ultimate Step-By-Step GuideAinda não há avaliações
- Component Based Software Development Life CyclesDocumento14 páginasComponent Based Software Development Life CyclesVinicio Mora HAinda não há avaliações
- Unit2 (Chapter 3)Documento31 páginasUnit2 (Chapter 3)Siraj Ud-DoullaAinda não há avaliações
- Structured programming Complete Self-Assessment GuideNo EverandStructured programming Complete Self-Assessment GuideAinda não há avaliações
- 3-Enriching The Integration As A Service Paradigm For The Cloud EraDocumento26 páginas3-Enriching The Integration As A Service Paradigm For The Cloud Eragovardhini SAinda não há avaliações
- Lecture 3 SimulatonDocumento32 páginasLecture 3 SimulatonAsad ButtAinda não há avaliações
- Comparative Analysis of Different Tools Business Process SimulationDocumento5 páginasComparative Analysis of Different Tools Business Process SimulationEditor IJRITCCAinda não há avaliações
- SMS NOTES 1st UNIT 8th SemDocumento30 páginasSMS NOTES 1st UNIT 8th Semgvarun_1989100% (1)
- Continuous Improvement A Complete Guide - 2019 EditionNo EverandContinuous Improvement A Complete Guide - 2019 EditionAinda não há avaliações
- Data Visualization Complete NotesDocumento28 páginasData Visualization Complete Notesprimevideo09871234Ainda não há avaliações
- Operating System NotesDocumento16 páginasOperating System NotesSreedhar YellamAinda não há avaliações
- Chapter 3 - Simple Sorting and SearchingDocumento18 páginasChapter 3 - Simple Sorting and SearchingShemsedinShukre100% (1)
- Review Questions PDocumento7 páginasReview Questions PRomeo GongobAinda não há avaliações
- Se 5&2Documento40 páginasSe 5&2SAJIN PAinda não há avaliações
- CIM Lecture Notes 12Documento13 páginasCIM Lecture Notes 12Babatunde Victor JuniorAinda não há avaliações
- Ooad Unit IDocumento227 páginasOoad Unit IShubham GuptaAinda não há avaliações
- PLC Vs SDLCDocumento1 páginaPLC Vs SDLCorjuanAinda não há avaliações
- Assignment 2Documento1 páginaAssignment 2Razman RazuwanAinda não há avaliações
- Production Flow AnalysisDocumento24 páginasProduction Flow AnalysisSelva Shri NathAinda não há avaliações
- Management Information SystemDocumento24 páginasManagement Information SystemMohd Salman Shaikh50% (2)
- Real Time Operating System A Complete Guide - 2020 EditionNo EverandReal Time Operating System A Complete Guide - 2020 EditionAinda não há avaliações
- M.Phil Computer Science Cloud Computing ProjectsDocumento15 páginasM.Phil Computer Science Cloud Computing ProjectskasanproAinda não há avaliações
- Book AnswersDocumento43 páginasBook AnswersOmar NegmAinda não há avaliações
- Horizontal Prototype Vertical Prototype Analysis Prototype Domain PrototypeDocumento1 páginaHorizontal Prototype Vertical Prototype Analysis Prototype Domain PrototypeGangaa ShelviAinda não há avaliações
- Output AnalysisDocumento80 páginasOutput Analysisscanny16Ainda não há avaliações
- Assignment-2 Ami Pandat Parallel Processing: Time ComplexityDocumento12 páginasAssignment-2 Ami Pandat Parallel Processing: Time ComplexityVICTBTECH SPUAinda não há avaliações
- Autonomic Computing: A Seminar Report OnDocumento43 páginasAutonomic Computing: A Seminar Report OnIyere GiftAinda não há avaliações
- Emerging technologies A Complete Guide - 2019 EditionNo EverandEmerging technologies A Complete Guide - 2019 EditionAinda não há avaliações
- Verification and Validation of Simulation ModelsDocumento20 páginasVerification and Validation of Simulation ModelsManhAinda não há avaliações
- Lecture Note Formal Methods in Software Engineering - Lecture 1 (Download Tai Tailieutuoi - Com)Documento6 páginasLecture Note Formal Methods in Software Engineering - Lecture 1 (Download Tai Tailieutuoi - Com)Ashfaq AhmedAinda não há avaliações
- Parallel Processing Assignment 1Documento14 páginasParallel Processing Assignment 1RobelAinda não há avaliações
- MC0088 Data Warehousing & Data MiningDocumento10 páginasMC0088 Data Warehousing & Data MiningGaurav Singh JantwalAinda não há avaliações
- Unit 6 Waiting Lines/ Queuing Theory OutlineDocumento17 páginasUnit 6 Waiting Lines/ Queuing Theory OutlineHadiBiesAinda não há avaliações
- Review QuestionsDocumento4 páginasReview QuestionsMirza SelimovicAinda não há avaliações
- Design Patterns Lecture Notes On Unit 1Documento63 páginasDesign Patterns Lecture Notes On Unit 1Sam SidAinda não há avaliações
- Verification and ValidationDocumento41 páginasVerification and ValidationcrossgAinda não há avaliações
- Embedded Hypervisor The Ultimate Step-By-Step GuideNo EverandEmbedded Hypervisor The Ultimate Step-By-Step GuideAinda não há avaliações
- Lab Manual SREDocumento33 páginasLab Manual SRETazeen Fakih100% (1)
- Hciu AssignmentDocumento74 páginasHciu AssignmentAakash Bathla50% (2)
- CH 6 Exercise SolutionDocumento5 páginasCH 6 Exercise SolutionDrake KulAinda não há avaliações
- SW RequirementDocumento22 páginasSW RequirementGideonAlexanderAinda não há avaliações
- Design PatternsDocumento65 páginasDesign PatternsAshleyAndrianAinda não há avaliações
- Systems Planning and SelectionDocumento11 páginasSystems Planning and SelectionNATI NT100% (1)
- Chapter Project Planning FINALDocumento92 páginasChapter Project Planning FINALtilahunAinda não há avaliações
- Software Engineering and Project ManagementDocumento23 páginasSoftware Engineering and Project ManagementUmair Aziz KhatibAinda não há avaliações
- Database Replicator (Oracle To MS-Access) ProjectDocumento53 páginasDatabase Replicator (Oracle To MS-Access) ProjectRajeev RanjanAinda não há avaliações
- Queuing TheoryDocumento12 páginasQueuing TheoryPooja MeghwalAinda não há avaliações
- Prototyping in Systems AnalysisDocumento9 páginasPrototyping in Systems AnalysisDenisho Dee100% (1)
- Simulation Model & Systems SimulationDocumento21 páginasSimulation Model & Systems SimulationSilene OliveiraAinda não há avaliações
- SEMP Template - ABC EducationDocumento9 páginasSEMP Template - ABC EducationCVSCEducationFundAinda não há avaliações
- Productivity and Reliability-Based Maintenance Management, Second EditionNo EverandProductivity and Reliability-Based Maintenance Management, Second EditionAinda não há avaliações
- Project Report On Gym Management SystemDocumento113 páginasProject Report On Gym Management SystemJageshawarAinda não há avaliações
- Systems Analysis and DesignDocumento3 páginasSystems Analysis and DesignmuzuloveAinda não há avaliações
- Explain Why Information Systems Are So Essential in Business TodayDocumento7 páginasExplain Why Information Systems Are So Essential in Business TodaySmitho UnpluggedAinda não há avaliações
- Manager, Organization, and The TeamDocumento40 páginasManager, Organization, and The TeamWajdiAinda não há avaliações
- Business Expert SystemsDocumento3 páginasBusiness Expert SystemsSarath KrishnakumarAinda não há avaliações
- Cse-IV-unix and Shell Programming (10cs44) - NotesDocumento161 páginasCse-IV-unix and Shell Programming (10cs44) - NotesShaik AdiAinda não há avaliações
- Modeling The MastersDocumento1 páginaModeling The MastersTim NjagiAinda não há avaliações
- PDC Workshops 2019 CalendarDocumento1 páginaPDC Workshops 2019 CalendarTim NjagiAinda não há avaliações
- Yoga For Your Sacral ChakraDocumento1 páginaYoga For Your Sacral ChakraTim NjagiAinda não há avaliações
- Welcome TO Modeling The Masters © BonusesDocumento2 páginasWelcome TO Modeling The Masters © BonusesTim NjagiAinda não há avaliações
- Form 1 Application Renewal of Dog LicenseDocumento1 páginaForm 1 Application Renewal of Dog LicenseTim NjagiAinda não há avaliações
- 0207 640 825 Sharing Code: M-Pesa Paybill Number: Customer Care: Call 7/24 Customer Support OnDocumento1 página0207 640 825 Sharing Code: M-Pesa Paybill Number: Customer Care: Call 7/24 Customer Support OnTim NjagiAinda não há avaliações
- Climbing Mt. OloolokweDocumento1 páginaClimbing Mt. OloolokweTim NjagiAinda não há avaliações
- Memo From MDDocumento1 páginaMemo From MDTim NjagiAinda não há avaliações
- Kra PinDocumento1 páginaKra PinTim NjagiAinda não há avaliações
- From Cybernetics To Littleton - Techniques of Mind Control PDFDocumento10 páginasFrom Cybernetics To Littleton - Techniques of Mind Control PDFTim Njagi100% (1)
- Wa0015Documento6 páginasWa0015Tim NjagiAinda não há avaliações
- Recording Studio Business Plan: Summary Products & ServicesDocumento3 páginasRecording Studio Business Plan: Summary Products & ServicesTim NjagiAinda não há avaliações
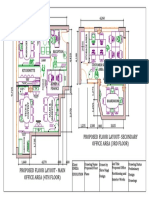
- Proposed Floor Layout-Secondary Office Area (3Rd Floor) : LobbyDocumento1 páginaProposed Floor Layout-Secondary Office Area (3Rd Floor) : LobbyTim NjagiAinda não há avaliações
- Unlimited Leasing Terms VoidDocumento2 páginasUnlimited Leasing Terms VoidTim NjagiAinda não há avaliações
- Timothy Njagi: Software DeveloperDocumento3 páginasTimothy Njagi: Software DeveloperTim NjagiAinda não há avaliações
- Basic Leasing Terms VoidDocumento2 páginasBasic Leasing Terms VoidTim NjagiAinda não há avaliações
- Exclusive Contract Example PDFDocumento1 páginaExclusive Contract Example PDFTim NjagiAinda não há avaliações
- Cloudworker Offer Letter KenyaDocumento1 páginaCloudworker Offer Letter KenyaTim NjagiAinda não há avaliações
- List of Colleges Under 2 (F) and 12 (B) (State-Wise & University-Wise)Documento46 páginasList of Colleges Under 2 (F) and 12 (B) (State-Wise & University-Wise)harsh_sharma_25Ainda não há avaliações
- The Cognitive Neuroscience of LGG Acquisition PDFDocumento24 páginasThe Cognitive Neuroscience of LGG Acquisition PDFElisabete BarbosaAinda não há avaliações
- Facilitate Learning Session: Prepared By: Wilmer J. DirectoDocumento31 páginasFacilitate Learning Session: Prepared By: Wilmer J. DirectoJohn Wilner DirectoAinda não há avaliações
- Mahehwaran D Internship ReportDocumento25 páginasMahehwaran D Internship ReportMaheshwaran DAinda não há avaliações
- Tempo 2023Documento53 páginasTempo 2023Melanie Grace Ulgasan LuceroAinda não há avaliações
- DLSU Student HandbookDocumento385 páginasDLSU Student Handbookmon fullanteAinda não há avaliações
- Positive ReinforcementDocumento2 páginasPositive Reinforcementapi-336169675100% (1)
- Wilson & Groves (1973)Documento7 páginasWilson & Groves (1973)jorge9000000Ainda não há avaliações
- Article Review (Group Assignment)Documento4 páginasArticle Review (Group Assignment)neway meleseAinda não há avaliações
- Volleyball History: Reminiscence of The Game!Documento30 páginasVolleyball History: Reminiscence of The Game!Aiziel OrenseAinda não há avaliações
- Place Based EducationDocumento22 páginasPlace Based Educationapi-327889005Ainda não há avaliações
- Preparation Tips VBAT MBA PDFDocumento5 páginasPreparation Tips VBAT MBA PDFNishant Nitz AggarwalAinda não há avaliações
- Commonly Asked QuestionsDocumento19 páginasCommonly Asked QuestionsCahynd ContentAinda não há avaliações
- Personal Information: Algeria / Master'S Degree 2018989299 / 22DZ011511Documento6 páginasPersonal Information: Algeria / Master'S Degree 2018989299 / 22DZ011511Mira GouffiAinda não há avaliações
- Etools: Using Kialo in The ClassroomDocumento6 páginasEtools: Using Kialo in The ClassroombibliotecaebsbaiaoAinda não há avaliações
- CRNIC Syllabus GENS5094 Theorizing Masc 2023-24Documento5 páginasCRNIC Syllabus GENS5094 Theorizing Masc 2023-24Sohail Ahmad KhanAinda não há avaliações
- HCI Introduction and Psychology of Usable Things: Usman AhmadDocumento14 páginasHCI Introduction and Psychology of Usable Things: Usman Ahmadblack smith100% (1)
- Nakamura Tome Sc200Documento52 páginasNakamura Tome Sc200JoKeRAinda não há avaliações
- Guiding Childrens Social Development and Learning 8th Edition Kostelnik Test BankDocumento13 páginasGuiding Childrens Social Development and Learning 8th Edition Kostelnik Test BankChadJacksonbidmk100% (16)
- Unit 11 - Lesson A: Family Traits: Touchstone 2nd Edition - Language Summary - Level 2Documento3 páginasUnit 11 - Lesson A: Family Traits: Touchstone 2nd Edition - Language Summary - Level 2Sebas GrijalvaAinda não há avaliações
- Worksheet Q1 Week 3 Developing Stages in Middle and Late AdolescenceDocumento3 páginasWorksheet Q1 Week 3 Developing Stages in Middle and Late AdolescenceKent PesidasAinda não há avaliações
- Chapter IDocumento7 páginasChapter IAshley PanganAinda não há avaliações
- CT Routine Std-IVDocumento2 páginasCT Routine Std-IVMd Masud RanaAinda não há avaliações
- Chapter 1 Lesson 1 - The Importance of Research in Daily LifeDocumento12 páginasChapter 1 Lesson 1 - The Importance of Research in Daily LifeRomeo LicarteAinda não há avaliações
- EGRA toolkit-ENGLISH 3Documento17 páginasEGRA toolkit-ENGLISH 3Roselia Lazaro100% (1)
- Map Document 2015-06-03Documento12 páginasMap Document 2015-06-03AjayRampalAinda não há avaliações
- WK10 Lesson PDFDocumento5 páginasWK10 Lesson PDFPaul macaraegAinda não há avaliações
- A Co. S10 PT PlanDocumento3 páginasA Co. S10 PT PlancorinjoelAinda não há avaliações
- Lesson Plan ModelDocumento25 páginasLesson Plan ModeldeusdemonAinda não há avaliações
- Annotated BibliographyDocumento4 páginasAnnotated Bibliographyphamviv100% (1)