Você também pode gostar
- Master Builder Power Up! Level 2: Minecraft® Redstone for Intermediate PlayersNo EverandMaster Builder Power Up! Level 2: Minecraft® Redstone for Intermediate PlayersNota: 3 de 5 estrelas3/5 (4)
- Digital LED Thermometer with Microcontroller AVR ATtiny13No EverandDigital LED Thermometer with Microcontroller AVR ATtiny13Nota: 5 de 5 estrelas5/5 (1)
- How To Make Your First RobotDocumento51 páginasHow To Make Your First Robotspajk6Ainda não há avaliações
- How To Make Your First RobotDocumento51 páginasHow To Make Your First RobotScevola DenderaAinda não há avaliações
- How To Make Your First RobotDocumento51 páginasHow To Make Your First RobotJosé Antonio RuizAinda não há avaliações
- How To Build Your First Robot ! Full, Step by Step InstructionsDocumento51 páginasHow To Build Your First Robot ! Full, Step by Step InstructionsAhmad TouqirAinda não há avaliações
- How To Make Your First RobotDocumento51 páginasHow To Make Your First RobotVignes WaranAinda não há avaliações
- How To Make Your First RobotDocumento51 páginasHow To Make Your First RobotSharmain QuAinda não há avaliações
- How To Make Your First RobotDocumento51 páginasHow To Make Your First RobotAnimesh ShawAinda não há avaliações
- How To Make Your First RobotDocumento51 páginasHow To Make Your First Robotraj2192Ainda não há avaliações
- In System Programming (ISP) For ATMEL Chips: A Step by Step Construction GuideDocumento9 páginasIn System Programming (ISP) For ATMEL Chips: A Step by Step Construction Guidezbhp zAinda não há avaliações
- RadioKot - Digital Soldering Station On PIC16F88x - PIC16F87x (A)Documento11 páginasRadioKot - Digital Soldering Station On PIC16F88x - PIC16F87x (A)Costy45Ainda não há avaliações
- How To Make Your First RobotDocumento51 páginasHow To Make Your First Robotbalajiboss005Ainda não há avaliações
- How To Build Your First Robot ! Full, Step by Step InstructionsDocumento51 páginasHow To Build Your First Robot ! Full, Step by Step InstructionsJulio Garcia GarciaAinda não há avaliações
- How To Make Your First RobotDocumento51 páginasHow To Make Your First Robotjameslee27Ainda não há avaliações
- How To Make Your First Robot1Documento51 páginasHow To Make Your First Robot1Vishnu VipinAinda não há avaliações
- How To Make Your First RobotDocumento51 páginasHow To Make Your First RobotAlex LeșanuAinda não há avaliações
- CME3208 - Lab Material List PDFDocumento16 páginasCME3208 - Lab Material List PDFGzdAinda não há avaliações
- May 2008Documento3 páginasMay 2008api-3707767Ainda não há avaliações
- Laser Harp Online InstructionsDocumento10 páginasLaser Harp Online InstructionsrodrigoAinda não há avaliações
- Robosapienpet'S Supersapien Mod#1 - SapavrDocumento7 páginasRobosapienpet'S Supersapien Mod#1 - SapavrRICHARDAinda não há avaliações
- Open Source Turtle Robot (OSTR) : InstructablesDocumento43 páginasOpen Source Turtle Robot (OSTR) : Instructablesjulio arriolaAinda não há avaliações
- Understanding MR GeneralDocumento8 páginasUnderstanding MR GeneralRicardo Antonio VasquezAinda não há avaliações
- The Eye WriterDocumento14 páginasThe Eye WriterRoberto AbadiaAinda não há avaliações
- Lighted Plexiglass Christmas Ornaments (Arduino Version) - Open Electronics - Open ElectronicsDocumento5 páginasLighted Plexiglass Christmas Ornaments (Arduino Version) - Open Electronics - Open ElectronicsK. RAJA SEKARAinda não há avaliações
- How To Make Your First RobotDocumento51 páginasHow To Make Your First RobotDhawal DeshpandeAinda não há avaliações
- How To Make Your First RobotDocumento51 páginasHow To Make Your First RobotSaurabh ChavanAinda não há avaliações
- How To Make Your First RobotDocumento51 páginasHow To Make Your First RobotSuria Prasad சூரிய பிரசாத்Ainda não há avaliações
- How To Make Your First RobotDocumento51 páginasHow To Make Your First RobotRenganathan KrishnanAinda não há avaliações
- 4 CH DMX Dimmer: InstructablesDocumento7 páginas4 CH DMX Dimmer: InstructablesCorrado BrianteAinda não há avaliações
- Sound Card Oscilloscope - MakeDocumento14 páginasSound Card Oscilloscope - MakezaphossAinda não há avaliações
- Homebrew Powermeter PDFDocumento5 páginasHomebrew Powermeter PDFmagicecstaticAinda não há avaliações
- Digital Electronics Lab Manual FOR 2/4 B.Tech (ECE) Course Code: Ec-253Documento57 páginasDigital Electronics Lab Manual FOR 2/4 B.Tech (ECE) Course Code: Ec-253Jagadeesh KumarAinda não há avaliações
- Rapid Application Development:: Race Against The ClockDocumento4 páginasRapid Application Development:: Race Against The ClockAiman_Amin2710Ainda não há avaliações
- Design and Build A Raspberry Pi Robot: by Stewart Watkiss (Penguintutor)Documento71 páginasDesign and Build A Raspberry Pi Robot: by Stewart Watkiss (Penguintutor)Trung KiênAinda não há avaliações
- Python RF Development Kit: InstructablesDocumento7 páginasPython RF Development Kit: Instructableshans landa100% (1)
- O Melhor ProjetoDocumento24 páginasO Melhor ProjetowgpgarciaAinda não há avaliações
- Materials Needed: All Images in High-Res HereDocumento60 páginasMaterials Needed: All Images in High-Res HereSudharshan SrinathAinda não há avaliações
- Hss MaterialrequirementsDocumento10 páginasHss Materialrequirementsybbvvprasada raoAinda não há avaliações
- ACN LabDocumento9 páginasACN LabSandy AroraAinda não há avaliações
- Harpit - Sandhu Programming - The.propeller - With.spinDocumento18 páginasHarpit - Sandhu Programming - The.propeller - With.spinEffin LoosahAinda não há avaliações
- Building An Arduino ROVDocumento14 páginasBuilding An Arduino ROVDavid ClodeAinda não há avaliações
- Automatic Water Level Indicator and Pump Controller Using ArduinoDocumento18 páginasAutomatic Water Level Indicator and Pump Controller Using ArduinoShishir ZamanAinda não há avaliações
- 3 Floor Elevator ArduinoDocumento13 páginas3 Floor Elevator ArduinominhasranaAinda não há avaliações
- MATUTINA-3A Act4Documento5 páginasMATUTINA-3A Act4Rea May MatutinaAinda não há avaliações
- Morse Code Decoder CircuitDocumento4 páginasMorse Code Decoder CircuitPrasanna KumarAinda não há avaliações
- Toy CarDocumento23 páginasToy CarthreephasefaultAinda não há avaliações
- Wired Communication Between Two Arduinos: Graham Lambert Arduino 4Documento75 páginasWired Communication Between Two Arduinos: Graham Lambert Arduino 4Olakanmi OluwatobiAinda não há avaliações
- Ten Breadboard Projects For BeginnersDocumento34 páginasTen Breadboard Projects For BeginnersMuhammad QurbanAinda não há avaliações
- DC&CN Lab ManualDocumento50 páginasDC&CN Lab ManualSwathi PothurajulaAinda não há avaliações
- Experiment No 1. Aim: Theory:: To Study RF LinkDocumento14 páginasExperiment No 1. Aim: Theory:: To Study RF LinkVarun BatraAinda não há avaliações
- Industrial Traning Report 3Documento26 páginasIndustrial Traning Report 3Sai ChesettiAinda não há avaliações
- Build Your First RobotDocumento8 páginasBuild Your First RobotVN ChampionAinda não há avaliações
- Purpose & Overview of This ProjectDocumento8 páginasPurpose & Overview of This ProjectWilly CedeñoAinda não há avaliações
- How To Make Cheap DIY OpenLRSNG Receiver RX 433mhzDocumento10 páginasHow To Make Cheap DIY OpenLRSNG Receiver RX 433mhzpaolaAinda não há avaliações
- School of Electrical Engineering: The University of Faisalabad, FaisalabadDocumento13 páginasSchool of Electrical Engineering: The University of Faisalabad, FaisalabadSHAROON SARDAR GHULAMAinda não há avaliações
- VUSBTiny AVR SPI ProgrammerDocumento6 páginasVUSBTiny AVR SPI Programmerjose_mairenaAinda não há avaliações
- Ardruino 6DOF Motion Platform LoResDocumento13 páginasArdruino 6DOF Motion Platform LoResFabio PedroAinda não há avaliações
- Arduino TNCDocumento11 páginasArduino TNCIoannis PerperisAinda não há avaliações
- Breadboard TutorialDocumento30 páginasBreadboard Tutorialkalscrib100% (1)
- User Manual: Rev. V1.0Documento120 páginasUser Manual: Rev. V1.0Lord_JoelAinda não há avaliações
- Dolby Atmos Enabled Elite Concentric Floorstanding Speakers Designed by Andrew JonesDocumento1 páginaDolby Atmos Enabled Elite Concentric Floorstanding Speakers Designed by Andrew JonesLord_JoelAinda não há avaliações
- Autodesk Moldflow Course OutlineDocumento2 páginasAutodesk Moldflow Course OutlineLord_JoelAinda não há avaliações
- Hi3798M V200 Data Sheet 01-General InformationDocumento52 páginasHi3798M V200 Data Sheet 01-General InformationLord_JoelAinda não há avaliações
- Pixelplus-Pc1030n C11168Documento96 páginasPixelplus-Pc1030n C11168Lord_Joel100% (1)
- PC1030DDocumento22 páginasPC1030DLord_JoelAinda não há avaliações
- Lepton Engineering Datasheet Without RadiometryDocumento62 páginasLepton Engineering Datasheet Without RadiometryLord_JoelAinda não há avaliações
- Grid Connect InverterDocumento9 páginasGrid Connect InverterLord_JoelAinda não há avaliações
- Space Based Solar PowerDocumento18 páginasSpace Based Solar PowerLord_JoelAinda não há avaliações
- MemristorsDocumento26 páginasMemristorsLord_JoelAinda não há avaliações
- I-Cybie Quick Start GuideDocumento2 páginasI-Cybie Quick Start GuideLord_JoelAinda não há avaliações
- Cnrfgwa-418: 418Mhz 1-Way RF GatewayDocumento2 páginasCnrfgwa-418: 418Mhz 1-Way RF GatewayLord_JoelAinda não há avaliações
- Manual Nexstar RCDocumento27 páginasManual Nexstar RCLord_JoelAinda não há avaliações
- About Solar InverterDocumento25 páginasAbout Solar InverterLord_JoelAinda não há avaliações
- Power Supply 15v - 2a D YaxunDocumento1 páginaPower Supply 15v - 2a D YaxunLord_Joel0% (1)
- IRFB3206 Mosfet 30A Solar Charge ControllerDocumento12 páginasIRFB3206 Mosfet 30A Solar Charge ControllerLord_JoelAinda não há avaliações
- cm60 cm6024z cm6048zDocumento13 páginascm60 cm6024z cm6048zLord_JoelAinda não há avaliações
- 178b 8 16gb 2c0f Mobile Lpddr3Documento160 páginas178b 8 16gb 2c0f Mobile Lpddr3Lord_JoelAinda não há avaliações
- KXSD9-2050 Specifications Rev 3aDocumento25 páginasKXSD9-2050 Specifications Rev 3aLord_JoelAinda não há avaliações
- C5353 Toshiba PDFDocumento5 páginasC5353 Toshiba PDFLord_JoelAinda não há avaliações
- Mizu Not Hydrogen EvDocumento6 páginasMizu Not Hydrogen EvLord_JoelAinda não há avaliações
- DeyeDocumento40 páginasDeyeLEON SOTNASAinda não há avaliações
- Servisni Manual Gree en Fairy 12 BGDocumento92 páginasServisni Manual Gree en Fairy 12 BGVictor Marcell Oliveira MesquitaAinda não há avaliações
- B.G. CB Ed 6en BLG Operating MechanismDocumento24 páginasB.G. CB Ed 6en BLG Operating MechanismShailenderAinda não há avaliações
- D8T - Track Type Tractor Serial Number Prefix East Peoria Illinois TTTD Worldwide KPZDocumento66 páginasD8T - Track Type Tractor Serial Number Prefix East Peoria Illinois TTTD Worldwide KPZmmAinda não há avaliações
- MG5223F NewDocumento5 páginasMG5223F NewThullyAinda não há avaliações
- Crystal Radio CircuitsDocumento11 páginasCrystal Radio CircuitsSubimal BawaliAinda não há avaliações
- Kubota Diesel Tractor: F12/R12 TransmissionDocumento16 páginasKubota Diesel Tractor: F12/R12 TransmissionBob DarkerAinda não há avaliações
- Specifications: Refrigerators and FreezersDocumento2 páginasSpecifications: Refrigerators and Freezersdwinanto100% (1)
- Capacitor Banks For Power Factor Correction by Engr. Ralph A. Pasilan, PEEDocumento51 páginasCapacitor Banks For Power Factor Correction by Engr. Ralph A. Pasilan, PEEnoel beloyAinda não há avaliações
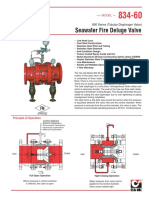
- Seawater Fire Deluge Valve: 800 Series (Tubular Diaphragm Valve)Documento2 páginasSeawater Fire Deluge Valve: 800 Series (Tubular Diaphragm Valve)dmitosAinda não há avaliações
- THE BIPOLAR JUNCTION TRANSISTOR IndividualDocumento19 páginasTHE BIPOLAR JUNCTION TRANSISTOR IndividualBenedict MadriagaAinda não há avaliações
- QUICLOCDocumento24 páginasQUICLOCTamilSelvanAinda não há avaliações
- Catalog Fortuner GR Sport CompressedDocumento8 páginasCatalog Fortuner GR Sport CompressedAbdul AjisAinda não há avaliações
- Paper BDocumento10 páginasPaper BLuis GomezAinda não há avaliações
- Denon AVR-2113 PDFDocumento222 páginasDenon AVR-2113 PDFboroda2410100% (5)
- 725C and 730C Articulated Truck Hydraulic System (Interactive), 372-5143 (UENR3202)Documento14 páginas725C and 730C Articulated Truck Hydraulic System (Interactive), 372-5143 (UENR3202)JHORDAN ANDR�S ARANCIBIA GODOYAinda não há avaliações
- Sherwood Cot InstructionsDocumento12 páginasSherwood Cot Instructionsrealdaross0% (2)
- Bahria Town LHR Electric Fencing With Wifi EnergizerDocumento3 páginasBahria Town LHR Electric Fencing With Wifi EnergizerTicketKataaoAinda não há avaliações
- Approved List of Brand of Electrical Material EE - Electric - A 2018Documento9 páginasApproved List of Brand of Electrical Material EE - Electric - A 2018Sats SatsAinda não há avaliações
- Lab Report 4.Documento7 páginasLab Report 4.Usman Ali Usman AliAinda não há avaliações
- Romick M. Castor: Culipapa, Hinoba-An Negros OccidentalDocumento3 páginasRomick M. Castor: Culipapa, Hinoba-An Negros OccidentalRena Rose MalunesAinda não há avaliações
- AlptecDocumento15 páginasAlpteczakiAinda não há avaliações
- Delta Static Var Generator SVG2000 Series: Automation For A Changing WorldDocumento12 páginasDelta Static Var Generator SVG2000 Series: Automation For A Changing WorldAldrin Andrés Martínez (Fonkel Mexicana)Ainda não há avaliações
- M-057 M-E & A-E F.O. Booster UnitDocumento254 páginasM-057 M-E & A-E F.O. Booster UnitВасиль Гудзь100% (1)
- Ringfeder 303aus Technical SpecsDocumento4 páginasRingfeder 303aus Technical SpecsMagico NinoAinda não há avaliações
- proxxon کاتالوگDocumento70 páginasproxxon کاتالوگمرتضی فراهانیAinda não há avaliações
- Al Rafedain Marine Services LLC.: Ship / Shore Safety Check-LisDocumento5 páginasAl Rafedain Marine Services LLC.: Ship / Shore Safety Check-LisPavel ViktorAinda não há avaliações
- Megane F7R710 ECU Pinout PDFDocumento5 páginasMegane F7R710 ECU Pinout PDFAlberto Martiniere100% (1)
- Caterpillar CB 534D Serie FGH Sist. ElectricoDocumento6 páginasCaterpillar CB 534D Serie FGH Sist. ElectricoCarlos Irabedra100% (1)
- OSYSU-1, - 2: Outside Screw and Yoke Valve Supervisory SwitchDocumento4 páginasOSYSU-1, - 2: Outside Screw and Yoke Valve Supervisory Switchengineering projectAinda não há avaliações