Você também pode gostar
- Medicion RecalentamientoDocumento3 páginasMedicion Recalentamientoaucadenas100% (12)
- P6 LasdivinasDocumento27 páginasP6 LasdivinasCarla Dominguez Rivera100% (1)
- Tema 13 Conceptos Basicos Do CteDocumento4 páginasTema 13 Conceptos Basicos Do CteRocio Hermida MiserAinda não há avaliações
- Ats Soldador EcopetrolDocumento7 páginasAts Soldador EcopetrolJuan Fiestas LizamaAinda não há avaliações
- Trabajo de La CatapultaDocumento10 páginasTrabajo de La CatapultaKaren Yudith De La Cruz GuillenAinda não há avaliações
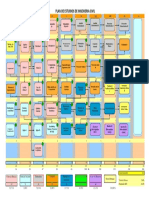
- Flujograma CivilDocumento1 páginaFlujograma CivilMichael BonillaAinda não há avaliações
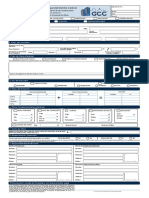
- F 01 Formulario de Licencia de ObraDocumento2 páginasF 01 Formulario de Licencia de Obranoel martinezAinda não há avaliações
- Asignacion MecanicaDocumento12 páginasAsignacion MecanicaLeonardo Morales0% (1)
- Guía Ejercicio de Conductividad Termica TUBERIASDocumento2 páginasGuía Ejercicio de Conductividad Termica TUBERIASDiego HuenchupaniAinda não há avaliações
- Pracicad DFDDocumento3 páginasPracicad DFDJazmin100% (1)
- Tema # 3 Resistencia Trabajo #23Documento51 páginasTema # 3 Resistencia Trabajo #23JoseDavidSosaAinda não há avaliações
- El Empleo de AditivosDocumento3 páginasEl Empleo de AditivosAlvaro Christian Apaza LajoAinda não há avaliações
- Ejercicios de Friccion PDFDocumento2 páginasEjercicios de Friccion PDFenriquebarreto800% (1)
- Consistencia, Estabilidad y ConvergenciaDocumento2 páginasConsistencia, Estabilidad y ConvergenciaIgnacio Bianchi100% (1)
- Lab 5Documento5 páginasLab 5Engeelnicole Denegri100% (1)
- Ejercicios MCDocumento5 páginasEjercicios MCMartin TorizAinda não há avaliações
- Metodo de La Viga Conjugada y Trabajo VirtualDocumento14 páginasMetodo de La Viga Conjugada y Trabajo VirtualreneAinda não há avaliações
- Ejercicios de HidrodinamicaDocumento7 páginasEjercicios de HidrodinamicaJick MarceloAinda não há avaliações
- Elementos-Cuerpos CompuestosDocumento5 páginasElementos-Cuerpos CompuestosAdrian GranilloAinda não há avaliações
- Estática de Cuerpos PuntualesDocumento9 páginasEstática de Cuerpos PuntualesLuis Soza FerrufinoAinda não há avaliações
- Investigación - Movimiento CurvilineoDocumento7 páginasInvestigación - Movimiento CurvilineoJOSUE HUERTAAinda não há avaliações
- 10 Reglas de Oro Al Trabajar Con Ms ProjectDocumento4 páginas10 Reglas de Oro Al Trabajar Con Ms Projectddavvid2Ainda não há avaliações
- Formas de Distribucion de Agua CalienteDocumento3 páginasFormas de Distribucion de Agua CalienteHector CanchicaAinda não há avaliações
- Ensayo de Traccion PDFDocumento13 páginasEnsayo de Traccion PDFIvan Garcia CernaAinda não há avaliações
- Analisis Estructural ArmadurasDocumento18 páginasAnalisis Estructural ArmadurasJose Carlos Navarro Rojas100% (1)
- Informe 2 Tubo Simple PVC OSCAR MENDOZADocumento10 páginasInforme 2 Tubo Simple PVC OSCAR MENDOZAOscar Alfredo Mendoza VillavicencioAinda não há avaliações
- Marco TeóricoDocumento6 páginasMarco Teóricojose ferrerAinda não há avaliações
- Ejercicios PropuestosDocumento3 páginasEjercicios PropuestosOrlandoQuilcateAinda não há avaliações
- Problemas de Fisica II Capacitancia y DielectricosDocumento13 páginasProblemas de Fisica II Capacitancia y DielectricosZulay FernándezAinda não há avaliações
- E.T. Asfalto Modificado Con PolímerosDocumento3 páginasE.T. Asfalto Modificado Con PolímerosGonnei PublicidadAinda não há avaliações
- 1 ProbabilidadesDocumento28 páginas1 ProbabilidadesHector Camaya100% (1)
- Diagrama de Fases BinariosDocumento6 páginasDiagrama de Fases BinariosTeresa MantillaAinda não há avaliações
- Dimensiones de LotesDocumento19 páginasDimensiones de LotesWilliamManriqueAinda não há avaliações
- Reporte ProyectoDocumento5 páginasReporte ProyectoNAOMI AGUILAR TORRESAinda não há avaliações
- Qui U3 A3 JCRRDocumento39 páginasQui U3 A3 JCRREsther Gutiérrez0% (1)
- Cinética de Una Partícula, Trabajo y Energía PDFDocumento12 páginasCinética de Una Partícula, Trabajo y Energía PDFBrayan Steven LopezAinda não há avaliações
- Ecuaciones Diferenciales para Vigas ColumnasDocumento5 páginasEcuaciones Diferenciales para Vigas ColumnasJose Luis50% (2)
- Diagrama de Iteraccion para La ColumnaDocumento8 páginasDiagrama de Iteraccion para La ColumnaOrlando Flores DiazAinda não há avaliações
- Hidrodinamica Continiudad y BernoulliDocumento13 páginasHidrodinamica Continiudad y BernoulliJair AguileraAinda não há avaliações
- Suelos Taylor CasagrandeDocumento4 páginasSuelos Taylor CasagrandeDante BtAinda não há avaliações
- Informe Ley de OhmDocumento25 páginasInforme Ley de OhmKenneth Fernández EsquivelAinda não há avaliações
- Estatica 2-1Documento16 páginasEstatica 2-1Jonathan Terrón0% (1)
- Lineas de InfluenciaDocumento8 páginasLineas de InfluenciaRobinson ValeroAinda não há avaliações
- Unidad III Fuerza EspecificaDocumento11 páginasUnidad III Fuerza Especificamanuel navaAinda não há avaliações
- Los ComandosDocumento3 páginasLos ComandosMagIng Miguel Angel Sedano TapiaAinda não há avaliações
- Personajes de La HidraulicaDocumento21 páginasPersonajes de La Hidraulicashoretapia53100% (2)
- Ecuaciones Diferenciales para Vigas ColumnasDocumento5 páginasEcuaciones Diferenciales para Vigas ColumnasvidriosAinda não há avaliações
- Molde de Yeso para Fundir Cera Con La Forma de Un Engrane de Dientes Rectos.Documento20 páginasMolde de Yeso para Fundir Cera Con La Forma de Un Engrane de Dientes Rectos.ANDRES GUILCAPIAinda não há avaliações
- Sustitucion TrigonometricaDocumento10 páginasSustitucion TrigonometricaLatex666100% (1)
- Proyecto Final de DinamicaDocumento10 páginasProyecto Final de DinamicaJosé AguilarAinda não há avaliações
- Práctica 5 - Cinemática y DinámicaDocumento13 páginasPráctica 5 - Cinemática y DinámicaEduardo Salazar Pérez100% (1)
- Practica-Concetración de EsfuerzosDocumento6 páginasPractica-Concetración de EsfuerzosDianaCruzAinda não há avaliações
- Torsión MecánicaDocumento3 páginasTorsión Mecánicaeduardo huachoAinda não há avaliações
- Aci-Sistema de Vigas TDocumento2 páginasAci-Sistema de Vigas TLIBNI JAEL AYESTAS GARCIAAinda não há avaliações
- Informe Metodo de Ensayo para Determinar La GranulometriaDocumento7 páginasInforme Metodo de Ensayo para Determinar La GranulometriaMauricio Aguilar Sanchez100% (1)
- 3 - Miembros Cargados AxialmenteDocumento29 páginas3 - Miembros Cargados AxialmenteLaitoned50% (2)
- Analisis de PerdidasDocumento10 páginasAnalisis de PerdidasRodrigo RiveraAinda não há avaliações
- Laboratorio 1 - Mecanica de Fluidos - Propiedades de Viscosidad End PDFDocumento26 páginasLaboratorio 1 - Mecanica de Fluidos - Propiedades de Viscosidad End PDFLuis Gustavo García Rondón71% (7)
- Monografia de Ecuaciones Diferenciales Ordinarias PDFDocumento226 páginasMonografia de Ecuaciones Diferenciales Ordinarias PDFsuyen_calderonAinda não há avaliações
- Cinemática (Apunte de Rafael Benguria)Documento20 páginasCinemática (Apunte de Rafael Benguria)aranguiz2012Ainda não há avaliações
- Capitulo 4 Movimiento en Un PlanoDocumento31 páginasCapitulo 4 Movimiento en Un PlanoManuel Orrala ParedesAinda não há avaliações
- Momentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraNo EverandMomentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraAinda não há avaliações
- SESIÓN Utilizamos La Técnica Del Puntillismo en Una Imagen de La FamiliaDocumento3 páginasSESIÓN Utilizamos La Técnica Del Puntillismo en Una Imagen de La FamiliaPAMELA MALLCOAinda não há avaliações
- Estudio de Mercado - Pinturas y BarnicesDocumento219 páginasEstudio de Mercado - Pinturas y BarnicesLuisCastilloCastro100% (2)
- FICHERODocumento36 páginasFICHEROMerit ZenilAinda não há avaliações
- Parasitosis IntestinalesDocumento24 páginasParasitosis IntestinalesFrancisco ChalenAinda não há avaliações
- Pregunta 1Documento2 páginasPregunta 1Gabriela CondoriAinda não há avaliações
- Unan Managua Guia Autoestudio Matematica 2019Documento3 páginasUnan Managua Guia Autoestudio Matematica 2019boscoasAinda não há avaliações
- Aurelio Marín AranzanaDocumento84 páginasAurelio Marín Aranzanahgaleas5Ainda não há avaliações
- Análisis de Variables Macroeconómicas de Chile Durante Los Años 2001-2021Documento25 páginasAnálisis de Variables Macroeconómicas de Chile Durante Los Años 2001-2021ADRIANA YNÉS FERNANDEZ CHAVEZAinda não há avaliações
- Product BacklogDocumento1 páginaProduct Backlogedson molinaAinda não há avaliações
- Directrices Creacion y Fortalecimiento Bpdepartamentales - 0Documento22 páginasDirectrices Creacion y Fortalecimiento Bpdepartamentales - 0santyAinda não há avaliações
- Cracker Book by Vlad Acid Raven El PadrinoDocumento169 páginasCracker Book by Vlad Acid Raven El Padrinodsdsfgfdgfd100% (1)
- Helpdesk,+Garcia Revista n1 2021 DefDocumento29 páginasHelpdesk,+Garcia Revista n1 2021 DefHaxel ChavezAinda não há avaliações
- AchicoriaDocumento14 páginasAchicoriaCesarCumbreraAinda não há avaliações
- ACTIVIDADES CENTENAS Milo y Roco SepDocumento4 páginasACTIVIDADES CENTENAS Milo y Roco SepEfraín EduardoAinda não há avaliações
- Biomateriales Monografia EvolucionDocumento9 páginasBiomateriales Monografia EvolucionIsa Cerdá RiveraAinda não há avaliações
- Diseña Tu Éxito 2022Documento49 páginasDiseña Tu Éxito 2022Andrea RodriguezAinda não há avaliações
- Levi-Strauss - Estructuralismo en Ling y en AntropDocumento11 páginasLevi-Strauss - Estructuralismo en Ling y en AntropOscar JaimesAinda não há avaliações
- Ficha Técnica - Merivon®Documento3 páginasFicha Técnica - Merivon®Karen KarennAinda não há avaliações
- Caso Práctico ProbabilidadDocumento2 páginasCaso Práctico Probabilidadlineylosadag75% (4)
- Horarios Afianza-Inicio 22-08-22Documento14 páginasHorarios Afianza-Inicio 22-08-22Andre lizet Caldeon leytonAinda não há avaliações
- Reporte U4 Control de MotoresDocumento9 páginasReporte U4 Control de MotoresKáros VerheerendAinda não há avaliações
- Ogunda MafunDocumento3 páginasOgunda MafunbobdiazfrancoAinda não há avaliações
- Actividades Finales de Repaso de Lengua (4) (2122)Documento3 páginasActividades Finales de Repaso de Lengua (4) (2122)Consuelo AbadAinda não há avaliações
- Unidad I. Análisis Semántico Parte IIDocumento7 páginasUnidad I. Análisis Semántico Parte IIhishikyoAinda não há avaliações
- Mapa Mental 210Documento1 páginaMapa Mental 210Jessica HernándezAinda não há avaliações
- Empresa de ChocolateDocumento25 páginasEmpresa de ChocolateSaira Arely Tobar MoralesAinda não há avaliações
- Producto Académico 02Documento4 páginasProducto Académico 02ROSAURA CLAUDINA BAUTISTA CIRIACO0% (1)